Область техники, к которой относится изобретение
Настоящая заявка относится к медицинскому устройству, в частности, к гибкому приводному хирургическому инструменту.
Уровень техники
Хирургический степлер - это разновидность хирургического инструмента. Его принцип действия состоит в том, чтобы зажать ткань, замкнуть два соответствующих привода (обычно включает узел скоб наковальни и узел картриджа), а затем вытолкнуть металлические шовные скобы в картридж степплера, чтобы сформировать и сшить ткань вместе. В некоторых степлерах также установлен отрезной нож для резки сшиваемой ткани.
С развитием технологий традиционные хирургические методы постепенно превращаются в эндоскопическую хирургию. Эндоскопическая операция заключается в выполнении нескольких небольших разрезов диаметром 5-12 мм в разных частях брюшной полости или груди. Через эти небольшие разрезы вставляются линзы камеры и разные специальные хирургические инструменты. На телеэкран передаются изображения различных органов брюшной полости, снятые камерой, вставленной в брюшную полость. Хирург завершает операцию, наблюдая за изображением и выполняя операции вне тела, используя различные хирургические инструменты. Среди них эндоскопический степлер играет важнейшую роль в хирургии.
Однако эндоскопическая хирургия также имеет ограничения. Из-за ограниченности брюшного или грудного пространства традиционный линейный эндоскопический степлер в некоторых случаях не может эффективно достичь операционного поля для пережатия, рассечения и анастомозирования ткани. Так появился эндоскопический степлер с поворотным приводом степлера.
Режущий степлер EndoGIAUniversal и картридж со скобами от TycoHealtlicare (позже переименованный в Covidien) в США являются типичными продуктами для реализации вышеуказанных функций. В конструкции продукта в заявке на патент США с номером публикации US2010/0237131A1 используется структура шарнира+эксцентрикового шарнира с жесткими звеньями для реализации отклонения привода. Ограниченный принципом конструкции, максимальный угол изгиба привода составляет всего 45°. Если привод необходимо согнуть под большим углом для завершения операции, использование привода с малым углом поворота не сможет обеспечить резекцию определенных частей поражения. Например, при низкой резекции прямой кишки, так как пространство таза ограничивает угол устройства в полости таза, хотя привод с картриджем со скобами поворачивается, тем не менее, при некоторых операциях привод по-прежнему не может сшивать или разрезать ткань под вертикальным углом к прямой кишке, что не позволяет использовать такой инструмент для хирургического лечения некоторых пациентов с низким положением опухоли.
Ранее компания подала заявку на CN201510672007.2 - Гибкий приводной хирургический инструмент и CN201510026576.X - Хирургический инструмент и его механизм управления изгибом. Эти два патента могут обеспечить изгиб на 60 градусов привода картриджа со скобами, но картридж со скобами и механизм ручного управления изгибом относятся к разным продуктам. Врачу необходимо загрузить их вместе, чтобы реализовать контроль изгиба. Кроме того, к точности загрузки есть определенные требования.
Таким образом, изобретение направлено на создание хирургического инструмента, изгиб которого можно будет контролировать вручную без необходимости выполнения его загрузки врачом.
Сущность изобретения
Согласно настоящей заявке предоставляется гибкий приводной хирургический инструмент, который включает привод на дистальном конце, контроллер на проксимальном конце и удлинительную трубку между приводом и контроллером; удлинительная трубка подвижно соединена с дистальным концом контроллера, а дистальный конец удлинительной трубки шарнирно соединен с проксимальным концом привода; удлинительная трубка образует соединительный канал для передачи действия, производимого контроллером, на привод; контроллер содержит механизм управления изгибом, выполненный с возможностью перемещения по меньшей мере в одном направлении; удлинительная трубка включает в себя первую гибкую часть, которая перемещается по меньшей мере в одном направлении через механизм управления изгибом, приводя в действие первую гибкую часть, чтобы привод мог поворачиваться по меньшей мере в одну сторону относительно дистального конца удлинительной трубки.
Предпочтительно, дистальный конец удлинительной трубки шарнирно соединен с проксимальным концом привода через шарнир, а первая гибкая часть не проходит через центр шарнира, так что первая гибкая часть использует шарнир в качестве оси вращения для обеспечения крутящего момента для привода, заставляя привод вращаться по меньшей мере в одну сторону относительно дистального конца удлинительной трубки.
Далее привод вращается в плоскости, перпендикулярной оси вращения шарнира.
Согласно одному аспекту механизм управления изгибом включает в себя рабочую часть, шестерню управления изгибом и первую рейку управления изгибом, рабочая часть соединена с шестерней управления изгибом и приводит во вращение шестерню управления изгибом, которая находится в зацеплении с первой рейкой управления изгибом, а вращение шестерни управления изгибом заставляет первую рейку управления изгибом двигаться вперед или назад; первая рейка управления изгибом жестко соединена с проксимальным концом первой гибкой части.
Кроме того, удлинительная трубка также включает в себя вторую гибкую часть, и дистальный конец первой гибкой части и дистальный конец второй гибкой части соответственно соединены с обеих сторон привода вдоль центральной оси; когда механизм управления изгибом движется в первом направлении, он заставляет первую гибкую часть двигаться к ее проксимальному концу, а вторую гибкую часть - к ее дистальному концу, тем самым заставляя привод поворачиваться к первой стороне относительно дистального конца удлинительной трубки; когда механизм управления изгибом перемещается во втором направлении, он заставляет первую гибкую часть перемещаться к ее дистальному концу, вторую гибкую часть к ее проксимальному концу, тем самым приводя в действие привод относительно дистального конца удлинительной трубки.
Кроме того, первая гибкая часть и вторая гибкая часть представляют собой сегментированные гибкие части.
Кроме того, первая гибкая часть и вторая гибкая часть представляют собой гибкие тяговые элементы или тяговые тросы.
Кроме того, механизм управления изгибом также включает в себя вторую рейку управления изгибом, шестерня управления изгибом находится в зацеплении со второй рейкой управления изгибом, вращение шестерни управления изгибом заставляет вторую рейку управления изгибом двигаться вперед или назад, а вторая рейка управления изгибом жестко соединена с проксимальным концом второй гибкой части.
Кроме того, рабочая часть представляет собой ручку для управления изгибом. Рабочая зона ручки для управления изгибом находится за пределами удлинительной трубы.
Кроме того, удлинительная трубка включает в себя внешнюю трубку, верхнюю внутреннюю трубку и нижнюю внутреннюю трубку, при этом верхняя внутренняя трубка, нижняя внутренняя трубка и внешняя трубка расположены коаксиально.
Кроме того, первая гибкая часть представляет собой левый гибкий тяговый элемент, вторая гибкая часть представляет собой правый гибкий тяговый элемент, первая рейка управления изгибом представляет собой рейку управления левым изгибом, вторая рейка управления изгибом представляет собой рейку управления правым изгибом, а левая рейка управления изгибом и правая рейка управления изгибом расположены соответственно с обеих сторон нижней внутренней трубки; левый гибкий тяговый элемент и правый гибкий тяговый элемент соответственно проходят через соединительный узел и соединяются с левой и правой сторонами привода вдоль центральной оси; верхняя сторона шестерни управления изгибом соединена с ручкой для управления изгибом, так что вращение ручки для управления изгибом приводит в действие шестерню управления изгибом, а также приводит в действие левую и правую рейки управления изгибом, перемещая их вперед или назад, соответственно, левый гибкий тяговый элемент перемещается вперед или назад, а правая рейка управления изгибом приводит в действие правый левый гибкий тяговый элемент для перемещения вперед или назад.
Кроме того, проксимальный конец удлинительной трубки снабжен взаимосвязанными верхней крышкой и нижней крышкой поворотной головки, механизм управления изгибом расположен между верхней крышкой и нижней крышкой поворотной головки, а ручка для управления изгибом соединена с возможностью вращения с верхней крышкой поворотной головки через штифт ручки для управления изгибом для реализации управления изгибом.
Угол поворота привода по меньшей мере в одну сторону относительно дистального конца удлинительной трубки составляет любое значение от 0° до 180°.
Угол поворота ручки для управления изгибом может быть возвращен в угол β поворота привода в основном без потерь, эффективность передачи является высокой; регулируя размер угла поворота ручки для управления изгибом 14, можно управлять размером угла/3 изгиба привода; β может быть любым значением от 0° до 180°, например 0°, 30° и 45°, 60°, 90°, 120°, 135° и 180° и т. д.; 13 может иметь любое значение от 0° до 180°, например, 0°, 30°, 45°, 60°, 90°, 120°, 135°, 180° и т. д.;
В конкретном варианте осуществления угловое соотношение между α и β удовлетворяет следующей формуле:
β=0.9 α -2.1
Кроме того, гибкий тяговый элемент является съемным, например, сегментированный гибкий тяговый элемент может быть собран и снят, то есть левый гибкий тяговый элемент и правый гибкий тяговый элемент представляют собой два или более сегментов.
В другом варианте осуществления гибкий тяговый элемент может быть размещен поверх двух или более элементов.
Предпочтительно хирургический инструмент представляет собой эндоскопический степлер.
Кроме того, гибкий компонент представляет собой сгибаемый тяговый элемент или тросик.
Хирургический инструмент по настоящей заявке использует гибкие части для обеспечения изгиба привода относительно дистального конца удлинительной трубки, так что привод может изгибаться под большим углом, что делает его применимым для медицинского лечения в более сложных клинических условиях, например, операцию можно проводить более удобно в частях с ограниченным пространством (таких как грудная полость и полость таза), что позволяет решить проблемы, которые другие хирургические инструменты не могут решить. Хирургический инструмент с приводом по настоящему изобретению, который может изгибаться под большим углом и выполнять резекцию поражения, разрезание ткани, наложение швов и другие функции в различных сложных положениях, чтобы принести пользу большему количеству пациентов. Например, для пациентов с раком прямой кишки привод устройства по настоящему заявлению по-прежнему может быть повернут на угол, перпендикулярный прямой кишке, в самом нижнем положении прямой кишки, таким образом, большему количеству пациентов с раком прямой кишки могут быть проведены малоинвазивные операции. Кроме того, деталей трансмиссии в настоящей заявке мало, одна из них имеет низкую стоимость изготовления, а другая - малый допуск системы трансмиссии. Сборка и разборка могут быть реализованы путем расположения сегментированных гибких тяговых элементов, что удобно в использовании.
Хирургический инструмент по настоящему изобретению можно применять не только при хирургической операции, но и при сопутствующем лечении и диагностике. Кроме того, настоящее изобретение может применяться не только к эндоскопическим степлерам, но и к таким изделиям, как замыкатели и электроскальпели и т. д.
Краткое описание чертежей
Чтобы более четко проиллюстрировать техническое решение изобретения, ниже будут кратко представлены варианты осуществления или чертежи, необходимые для описания предшествующего уровня техники. Очевидно, что чертежи в нижеследующем описании представляют собой лишь некоторые варианты осуществления изобретения. Для специалистов в данной области техники другие чертежи могут быть получены из этих чертежей без творческой работы.
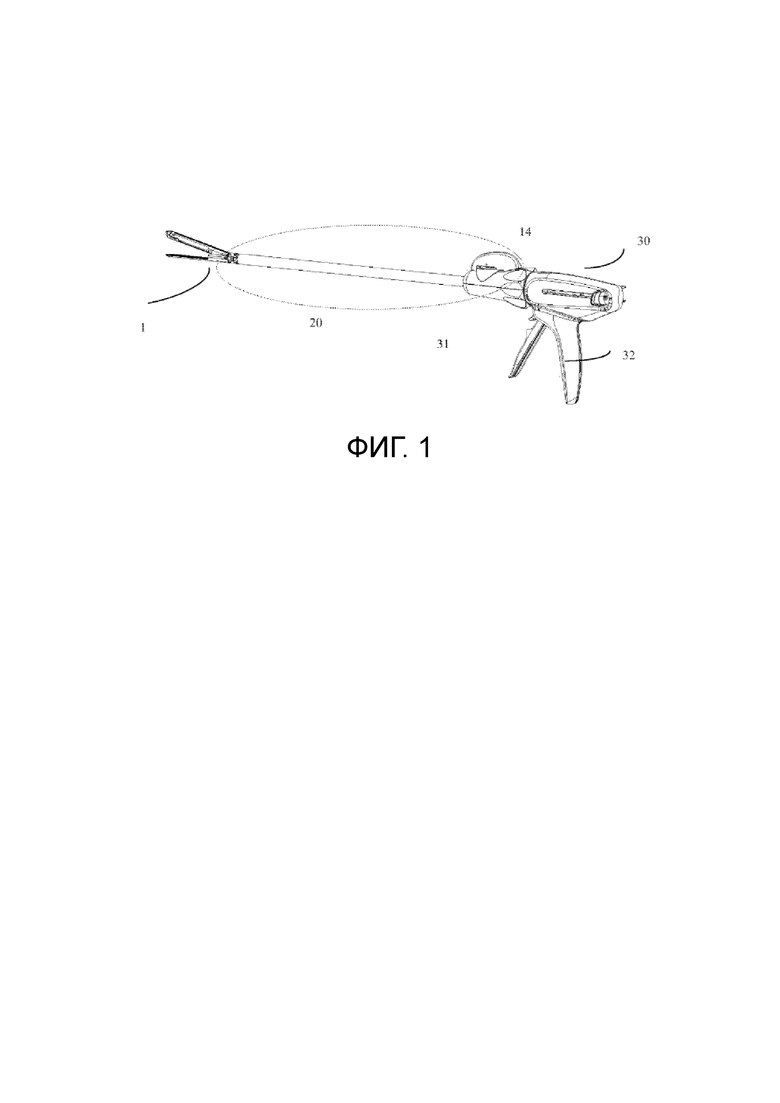
Фиг.1 - Схематическое изображение конструкции хирургического инструмента в соответствии с настоящей заявкой;
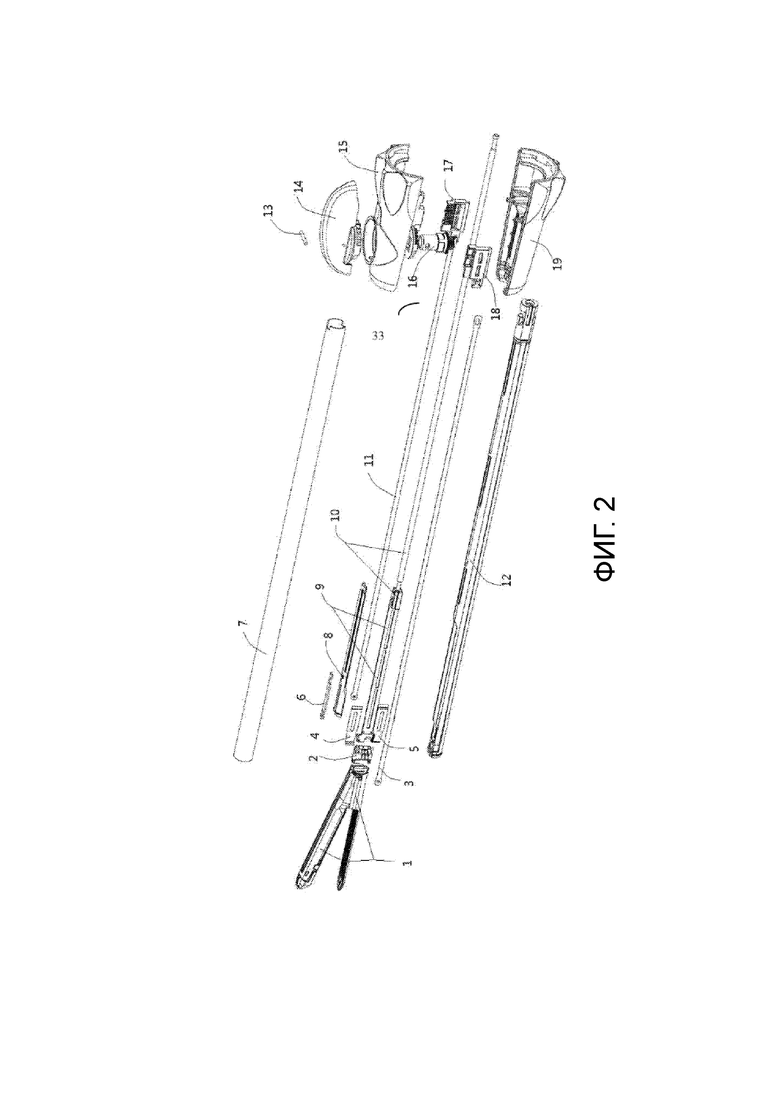
Фиг. 2 - Схематическое детализированное изображение эллиптической области фиг. 1;
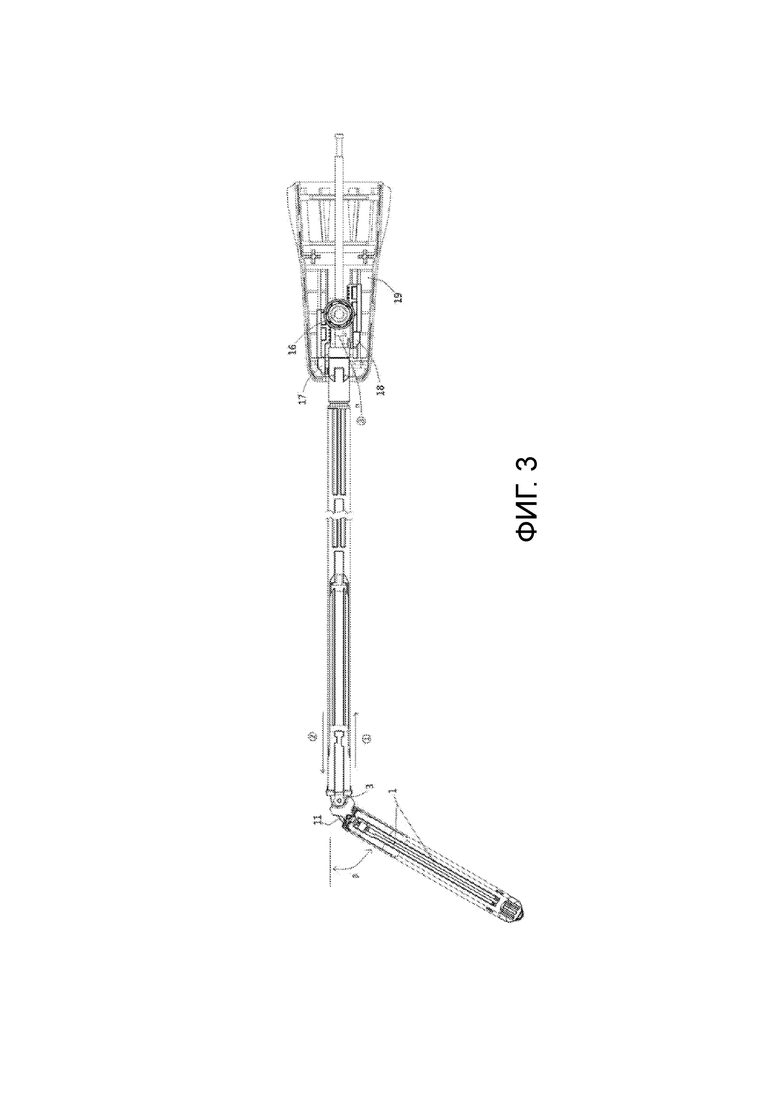
Фиг. 3 - Диаграмма состояния поворота привода в соответствии с настоящей заявкой.
На фигуре: 1: привод; 2: соединительный узел; 3: левый гибкий тяговый элемент; 4, 5: защитные пластины ножевой планки; 6: соединительная планка; 7: внешняя трубка; 8: верхняя внутренняя трубка; 9: узел резцедержателя; 10: узел центрального стержня; 11: правый гибкий тяговый элемент; 12: нижняя внутренняя трубка; 13: штифт ручки для управления изгибом; 14: ручка для управления изгибом; 15: верхняя крышка поворотной головки; 16: шестерня управления изгибом; 17: правая рейка управления изгибом; 18: левая рейка управления изгибом; 19: нижняя крышка поворотной головки; 20: удлинительная трубка; 30: контроллер; 31: подвижная ручка; 32: фиксированная ручка.
Подробное описание вариантов осуществления изобретения
Технические решения в вариантах осуществления настоящей заявки будут описаны ясно и полностью в сочетании с чертежами описания. Очевидно, что описанные варианты осуществления являются только частью вариантов осуществления настоящей заявки, а не всеми из них. На основе вариантов осуществления в этой заявке все другие варианты осуществления, полученные специалистами в данной области без творческой работы, должны входить в объем защиты настоящей заявки.
Термин «примерный» используется здесь для обозначения «используемый в качестве примера, образца или иллюстрации». Любая реализация, описанная здесь как «примерная», не обязательно должна рассматриваться как превосходящая или предпочтительнее других реализаций. Кроме того, «проксимальный конец», «проксимальный» и «задний» в данном тексте относятся к концу, близкому к оператору, а «дистальный конец», «дистальный» и «передний» относятся к концу, удаленному от оператора.
Для краткости в качестве примера используется степлер для иллюстрации устройства по настоящей заявке. Специалистам в данной области техники должно быть понятно, что гибкий приводной хирургический инструмент по настоящей заявке не ограничивается эндоскопическим степлером. Технология настоящей заявки также может применяться не только к эндоскопическим степлерам, но и к таким изделиям, как замыкатели, электроскальпели и т. д.
На фиг. 1 представлено схематическое изображение конструкции хирургического инструмента в соответствии с настоящей заявкой, предпочтительно хирургический инструмент представляет собой степлер. Степлер включает в себя привод 1, расположенный на дистальном конце, контроллер 30 на проксимальном конце и удлинительную трубку 20 между приводом 1 и контроллером 30. Удлинительная трубка 20 подвижно соединена с дистальным концом контроллера 30, а дистальный конец удлинительной трубки 20 шарнирно соединен с проксимальным концом привода 1, предпочтительно с помощью одного или нескольких шарниров. Удлинительная трубка 20 представляет собой соединительный канал для передачи действия, производимого контроллером 30, на привод 1. Привод 1 вращается с помощью контроллера 30, предпочтительно под определенным углом в плоскости, перпендикулярной оси вращения шарнира.
Хирургический инструмент по настоящей заявке может иметь цельную конструкцию, т. е. удлинительная трубка 20 в целом соединена с дистальным концом контроллера 30 и проксимальным концом привода 1 соответственно. В зависимости от различных показаний и конкретных состояний пациента длина удлинительной трубки 20 может отличаться.
Хирургический инструмент в соответствии с настоящей заявкой может также иметь раздельную конструкцию, разделенный хирургический инструмент может включать в себя степлер и картридж со скобами. Степлер и картридж со скобами можно объединить в единое целое с помощью определенных монтажных соотношений. В раздельном исполнении один и тот же степлер может использоваться для различных типов картриджей со скобами во время операции.
Ссылаясь на фиг. 2, контроллер 30 включает в себя механизм управления изгибом 33. Как показано на рисунке, в механизме управления изгибом 33 используется механизм реверсирования шестерен для управления изгибом привода 1 в двух направлениях. В частности, механизм управления изгибом 33 включает в себя шестерню управления изгибом 16, левую рейку управления изгибом 18 и правую рейку управления изгибом 17, расположенные между верхней крышкой вращающейся головки 15 и нижней крышкой вращающейся головки 19. Нижняя крышка вращающейся головки 19 расположена на проксимальном конце удлинительной трубки 20. Очевидно, что шестерня управления изгибом 16, левая рейка управления изгибом 18 и правая рейка управления изгибом 17 также могут быть размещены в удлинительной трубке 20.
Кроме того, контроллер 30 может иметь узел ручки. В частности, контроллер 30 включает в себя ручку для управления изгибом 14, фиксированную ручку 32, подвижную ручку 31 (например, спусковой крючок), подвижно соединенную с фиксированной ручкой и набор передаточных механизмов, которые передают действие подвижной ручки 31 на привод 1. При нажатии на спусковой крючок 31 привод 1 может непрерывно зажимать, сшивать и разрезать ткани человека. Рабочая зона ручку для управления изгибом 14 расположена вне верхней крышки поворотной головки 15 или нижней крышки поворотной головки 19, и оператор поворачивает ручку для управления изгибом 14 через рабочую зону, чтобы повернуть привод.
Предпочтительно, ручку для управления изгибом 14 поворачивается в каждое конкретное положение, а привод 1 соответственно поворачивается на определенный угол. Привод 1 можно поворачивать под разными углами для адаптации к различным клиническим применениям. Две функции поворота ручки для управления изгибом 14 для вращения привода 1 и управления спусковым крючком для приведения в действие привода независимы друг от друга. Вообще говоря, этапы работы хирургического инструмента по настоящей заявке следующие: сначала приведите в действие ручку управления изгибом, чтобы управлять приводом для поворота на соответствующий угол, требуемый при клиническом случае, после чего отрегулируйте положение ткани в зажимах привода, и затем задействуйте спусковой крючок для выполнения таких функций, как зажим, наложение швов и разрезание ткани.
Ниже приводится подробное описание цельной конструкции эндоскопического степлера в качестве примера.
См. на фиг. 2, на которой показан деталировочный чертеж части хирургического инструмента в соответствии с вариантом осуществления настоящей заявки. Проксимальный конец привода 1 соединен с дистальным концом удлинительной трубки 20 с помощью промежуточной соединительной части, промежуточная соединительная часть включает в себя соединительный узел 2. В предпочтительном варианте осуществления соединительный узел 2, удлинительная трубка 20 и привод 1 соединены шарнирами. Например, два шарнира пространственно параллельны друг другу и перпендикулярны плоскости, в которой привод может изгибаться.
Например, удлинительная трубка 20 эндоскопического степлера включает в себя внешнюю трубку 7, верхнюю внутреннюю трубку 8, нижнюю внутреннюю трубку 12, левый гибкий тяговый элемент 3 и правый гибкий тяговый элемент 11. В приведенном варианте осуществления верхняя внутренняя трубка 8, нижняя внутренняя трубка 12 и внешняя трубка 7 расположены коаксиально. Длина нижней внутренней трубки 12 больше, чем длина верхней внутренней трубки 8, и предпочтительно длина верхней внутренней трубки 8 соответствует длине узла резцедержателя 9 инструмента. Левая рейка управления изгибом 18 и правая рейка управления изгибом 17 соответственно расположены с обеих сторон нижней внутренней трубки 12. Левая рейка управления изгибом 18 жестко соединена с проксимальным концом левого гибкого тягового элемента 3, а правая рейка управления изгибом 17 жестко соединена с проксимальным концом правого гибкого тягового элемента 11. Левый гибкий тяговый элемент 3 и правый гибкий тяговый элемент 11 соответственно проходят через соединительный узел 2 и соединяются с левой и правой сторонами привода 1 вдоль центральной оси. Шестерня управления изгибом 16 расположен между левой рейкой управления изгибом 18 и правой рейкой управления изгибом 17 и входит в зацепление как с левой рейкой управления изгибом 18, так и с правой рейкой управления изгибом 17. Верхняя сторона шестерни управления изгибом 16 соединена с ручкой для управления изгибом 14, так что ручки для управления изгибом 14 приводит в движение шестерню управления изгибом 16, а вращение шестерни управления изгибом 16 дополнительно приводит в действие левую рейку управления изгибом 18 и правую рейку управления изгибом 17 для перемещения вперед или назад (то есть движение к проксимальному концу или дистальному концу), соответственно для приведения в движение левого гибкого тягового элемента 3 вперед или назад, а правая рейка управления изгибом 17 приводит в движение правый гибкий тяговый элемент 11, двигая его вперед или назад.
Как показано на фиг. 2, ручка для управления изгибом 14 соединена с возможностью вращения с верхней крышкой поворотной головки 15 через штифт ручки для управления изгибом 13. В верхней крышке поворотной головки 15 выполнено сквозное отверстие. Часть ручки для управления изгибом 14 проходит через сквозное отверстие и соединяется с шестерней управления изгибом 16 между верхней крышкой поворотной головки 15 и нижней крышкой поворотной головки 19.
Вышеупомянутый степлер включает в себя узел привода, который включает ползунок, отрезной нож, узел резцедержателя 9 и узел центрального стержня 10. Отрезной нож используется для разрезания ткани между рядами скоб после того, как ткань зашита скобами.
Согласно примеру настоящей заявки узел резцедержателя 9 узла привода частично размещен внутри удлинительной трубки 20 и проходит через соединительный узел 2. Отрезной нож и ползунок размещены внутри привода 1.
Как показано на фиг. 2, в месте соединения между узлом резцедержателя 9 и соединительным узлом 2 также предусмотрены защитные пластины ножевой планки 4, 5.
Как показано на фиг.1-3, согласно варианту осуществления настоящей заявки в исходном состоянии центральная ось привода 1 и удлинительная трубка 20 коллинеарны и находятся в прямолинейном состоянии. Дистальные концы левого гибкого тягового элемента 3 и правого гибкого тягового элемента 11 соответственно жестко соединены с приводом 1, например, с помощью заклепок. В такой конструкции положение соединения левого гибкого тягового элемента 3, правого гибкого тягового элемента 11 и привода 1 отклоняется от центральной плоскости симметрии, где расположены оси вращения двух шарниров, при этом левый гибкий тяговый элемент 3 и правый гибкий тяговый лемент 11 не проходят через центр шарнира. Таким образом, шарнир используется в качестве оси вращения двух тяговых элементов для обеспечения определенного крутящего момента для привода и приведения привода 1 во вращение.
Ссылаясь на фиг.3, на котором приведены схематическое изображение и частичный вид привода, поворачивающегося к первой стороне в хирургическом инструменте, согласно варианту осуществления настоящего изобретения. Вращение ручки для управления изгибом 14 против часовой стрелки (как показано стрелкой A) приводит в движение шестерню управления изгибом 16 против часовой стрелки. Правая рейка управления изгибом 17 перемещается вперед, и правый гибкий тяговый элемент 11 ослабляется (что показано стрелкой B), и в то же время заставляет левую рейку управления изгибом 18 двигаться назад, тем самым плотно прижимая левый гибкий тяговый элемент 3. (как показано стрелкой C). Привод 1 вращается на определенный угол против часовой стрелки относительно удлинительной трубки 2. Регулируя угол поворота ручки для управления изгибом 14, можно управлять углом поворота привода 1. Согласно варианту осуществления настоящей заявки α может быть любым значением от 0° до 180° (например, 0°, 30°, 45°, 60°, 90°, 120°, 135°, 180° и т. д.).
Как видно из фиг. 3, левый гибкий тяговый элемент 3 затянут, а правый гибкий тяговый элемент 11 ослаблен, что заставляет привод поворачиваться. В этом варианте осуществления шестерня управления изгибом 16 входит в зацепление с правой рейкой управления изгибом 17 и левой рейкой управления изгибом 18, таким образом заставляя правую рейку управления изгибом 17 двигаться вперед, правый гибкий тяговый элемент 11 ослаблен, направления движения двух реек противоположны. Когда привод вращается, смещения, вызванные затягиванием левого гибкого тягового элемента 3 и ослаблением правого гибкого тягового элемента 11, равны и компенсируют друг друга. В конструкции настоящего изобретения смещение двух тяговых элементов в противоположных направлениях также можно компенсировать другими способами.
Принцип поворота привода во вторую сторону аналогичен принципу поворота в первую сторону. Разница в том, что правый гибкий тяговый элемент 11 затянут, а гибкий тяговый элемент 3 ослаблен. Например, вращение ручки для управления изгибом 14 по часовой стрелке заставляет правый гибкий тяговый элемент 11 и левый гибкий тяговый элемент 3 двигаться в противоположном направлении, как показано на фиг. 3, тем самым заставляя привод вращаться по часовой стрелке.
Эффективность передачи является высокой, угол поворота ручки для управления изгибом 14 может быть возвращен в угол β поворота привода в основном без потерь; Регулируя угол поворота ручки для управления изгибом 14, можно управлять углом β изгиба привода; теоретически α может быть любым значением от 0° до 180°, например 0°, 30°, 45°, 60°, 90°, 120°, 135°, 180° и т. д., β может быть любым значением от 0° до 180°, например 0°, 30°, 45°, 60°, 90°, 120°, 135°, 180°.
В конкретном варианте осуществления угловое соотношение между α и β удовлетворяет следующей формуле:
β=0.9 α -2.1
В другом варианте осуществления левый гибкий тяговый элемент 3 и правый гибкий тяговый элемент 11 могут быть двухступенчатыми или многоступенчатыми. После того, как тяговый элемент будет разделен на сегменты, его можно собрать и разгрузить.
В другом варианте осуществления гибкий тяговый элемент может быть размещен поверх двух или более элементов.
В другом варианте осуществления ручка для управления изгибом 14 не вращается непрерывно, а устанавливает ряд фиксированных механизмов вращения, а разница между шестернями представляет собой, например, 2°, 5° или 10°.
Хирургический инструмент по настоящей заявке может использоваться при операциях на легких и пищеварительном тракте (включая желудок и кишечник). В хирургии легких, как правило, удаляются поражения. В хирургии желудочно-кишечного тракта, как правило, после удаления поражения перерезанную кишечную трубку необходимо подсоединить повторно.
В нормальных условиях привод гибкого эндоскопического степлера может быть изогнут, а проксимальный конец привода соединен с механизмом управления изгибом (например, шестерня управления изгибом 16 на фиг.) внутри контроллера (например, ручка степлера). Угол изгиба привода ругулируется путем регулировки механизмом управления изгибом. В исходном состоянии привод коллинеарен центральной оси удлинительной трубки и находится на прямой линии. Привод степлера выдвигается в грудную или брюшную полость через проколочное устройство, через проколочное устройство, осуществляется управление приводом для сгибания его на определенный угол с помощью внешнего механизма управления на ручке, почле чего на операционной области проводится серия операций, таких как удержание, рассечение и анастомоз. После завершения операции привод управляется механизмом управления изгибом на внешней ручке управления для возврата в линейное состояние и выведения его из организма.
Например, при хирургии пищеварительного тракта, чтобы полностью удалить опухоль и устранить остатки опухолевой ткани, положение поперечной линии разреза обычно составляет около 5 см от границы опухоли. Когда рак прямой кишки находится близко к нижнему положению ануса, необходимо, чтобы привод степлера мог быть помещен в нижнее положение в узкой полости таза. Под влиянием положения степлера, ограниченного бедренной костью, привод степлера с малым углом поворота не сможет разрезать прямую кишку вертикально, что увеличивает риск неполной резекции опухоли.
Хирургические инструменты с малым углом поворота привода не могут пересекать прямую кишку вертикально, в то время как степлеры с большим углом поворота привода могут. Кроме того, хирургические инструменты с большим углом поворота привода могут справиться с опухолями в нижнем положении. Когда угол поворота привода хирургического инструмента больше, он может разрезать опухоль в более низком положении, что облегчит использование при хирургии рака прямой кишки или других ситуациях, когда внутреннее пространство ограничено.
В соответствии с хирургическим инструментом по настоящей заявке угол поворота привода может достигать 90° или даже 180°, чтобы адаптироваться к экстремальным применениям.
Согласно другому варианту осуществления настоящей заявки, в качестве альтернативы, левый гибкий тяговый элемент 3 и правый гибкий тяговый элемент 11 также могут представлять собой тросики. Например, гибкие детали, такие как одножильный или многожильный обмоточный провод. Следует понимать, что вышеупомянутые гибкие тяговые элементы и тросики являются только примерами, а не ограничениями, и специалисты в данной области техники могут придумать аналогичные гибкие детали для реализации изгиба привода. Такая реализация не должна толковаться как вызывающая отклонение от объема настоящей заявки.
Кроме того, следует понимать, что описанные выше варианты осуществления также могут быть реализованы в хирургических инструментах, таких как эндоскопический степлер цельной конструкции. Различные варианты осуществления также могут быть реализованы в других изделиях, таких как замыкатели, электроскальпели и т. д.
Хирургический инструмент по настоящей заявке использует гибкие части для обеспечения изгиба привода относительно дистального конца удлинительной трубки, так что привод может изгибаться под большим углом, что делает его применимым для медицинского лечения в более сложных клинических условиях, например, операцию можно проводить более удобно в частях с ограниченным пространством (таких как грудная полость и полость таза), что позволяет решить проблемы, которые другие хирургические инструменты не могут решить. Хирургический инструмент с приводом по настоящему изобретению, который может изгибаться под большим углом и выполнять резекцию поражения, разрезание ткани, наложение швов и другие функции в различных сложных положениях, чтобы принести пользу большему количеству пациентов.
Приведенное выше описание и иллюстрация представлены только в качестве иллюстративных примеров. Любая ссылка на элемент формулы в единственном числе не должна интерпретироваться как ограничение элемента единственным числом. Технические специалисты могут реализовать описанную структуру по-разному для каждого конкретного приложения, однако такая реализация не должна интерпретироваться как ведущая к отклонению от объема настоящей заявки.
Предыдущее описание раскрытых вариантов осуществления предоставлено, чтобы дать возможность любому специалисту в данной области техники создать или использовать настоящее изобретение. Различные модификации этих вариантов осуществления будут очевидны специалистам в данной области техники, а общие принципы, определенные в данном документе, могут быть применены к другим вариантам осуществления, не выходя за рамки сущности или объема настоящей заявки. Таким образом, настоящая заявка не предназначена для ограничения приведенными здесь вариантами осуществления, но должна иметь самый широкий объем, согласующийся с формулой изобретения, принципами и новыми признаками, раскрытыми в данном документе.
Изобретение относится к медицинской технике, в частности к хирургическому инструменту с поворотным приводом. Хирургический инструмент с поворотным приводом содержит привод на дистальном конце, контроллер на проксимальном конце и удлинительную трубку между приводом и контроллером. Удлинительная трубка подвижно соединена с дистальным концом контроллера. Дистальный конец удлинительной трубки шарнирно соединен с проксимальным концом привода. Удлинительная трубка образует соединительный канал для передачи действия, производимого контроллером, на привод. Контроллер содержит механизм управления изгибом, выполненный с возможностью перемещения по меньшей мере в одном направлении. Механизм управления изгибом содержит рабочую часть, шестерню управления изгибом и первую рейку управления изгибом. Рабочая часть выполнена с возможностью соединения с шестерней управления изгибом и приводит во вращение шестерню управления изгибом, которая находится в зацеплении с первой рейкой управления изгибом. Удлинительная трубка содержит первую гибкую часть. Первая рейка управления изгибом жестко соединена с проксимальным концом первой гибкой части, а дистальный конец первой гибкой части соединен с одной стороны привода вдоль центральной оси. Первая гибкая часть перемещается к ее проксимальному концу или дистальному концу при вращении шестерни управления изгибом механизмом управления изгибом. Когда первая рейка управления изгибом выполнена с возможностью перемещения назад в результате вращения шестерни управления изгибом первая гибкая часть затягивается, а когда первая рейка управления изгибом выполнена с возможностью перемещения вперед в результате вращения шестерни управления изгибом первая гибкая часть ослабляется, и первая гибкая часть обеспечивает крутящий момент для привода и его поворот по меньшей мере в одну сторону относительно дистального конца удлинительной трубки. Использование изобретения позволяет обеспечить контроль управления изгибом. 12 з.п. ф-лы, 3 ил.
1. Хирургический инструмент с поворотным приводом, содержащий привод на дистальном конце, контроллер на проксимальном конце и удлинительную трубку между приводом и контроллером, причем удлинительная трубка подвижно соединена с дистальным концом контроллера, а дистальный конец удлинительной трубки шарнирно соединен с проксимальным концом привода, при этом удлинительная трубка образует соединительный канал для передачи действия, производимого контроллером, на привод, причем контроллер содержит механизм управления изгибом, выполненный с возможностью перемещения по меньшей мере в одном направлении, при этом механизм управления изгибом содержит рабочую часть, шестерню управления изгибом и первую рейку управления изгибом, причем рабочая часть выполнена с возможностью соединения с шестерней управления изгибом и приводит во вращение шестерню управления изгибом, которая находится в зацеплении с первой рейкой управления изгибом, удлинительная трубка содержит первую гибкую часть, первая рейка управления изгибом жестко соединена с проксимальным концом первой гибкой части, а дистальный конец первой гибкой части соединен с одной стороны привода вдоль центральной оси, причем первая гибкая часть перемещается к ее проксимальному концу или дистальному концу при вращении шестерни управления изгибом механизмом управления изгибом, при этом, когда первая рейка управления изгибом выполнена с возможностью перемещения назад в результате вращения шестерни управления изгибом, первая гибкая часть затягивается, а, когда первая рейка управления изгибом выполнена с возможностью перемещения вперед в результате вращения шестерни управления изгибом, первая гибкая часть ослабляется, и первая гибкая часть обеспечивает крутящий момент для привода и его поворот по меньшей мере в одну сторону относительно дистального конца удлинительной трубки.
2. Хирургический инструмент по п. 1, в котором дистальный конец удлинительной трубки шарнирно соединен с проксимальным концом привода через шарнир, а первая гибкая часть не проходит через центр шарнира, так что первая гибкая часть использует шарнир в качестве оси вращения для обеспечения крутящего момента для привода, заставляя привод вращаться по меньшей мере в одну сторону относительно дистального конца удлинительной трубки.
3. Хирургический инструмент по п. 2, в котором привод выполнен с возможностью вращения в плоскости, перпендикулярной оси вращения шарнира.
4. Хирургический инструмент по любому из пп. 1-3, в котором удлинительная трубка дополнительно содержит вторую гибкую часть, и дистальный конец первой гибкой части и дистальный конец второй гибкой части соответственно соединены с обеих сторон привода вдоль центральной оси; механизм управления изгибом выполнен с возможностью приведения первой гибкой части в движение к ее проксимальному концу при перемещении в первом направлении, а второй гибкой части - к ее дистальному концу, тем самым заставляя привод поворачиваться к первой стороне относительно дистального конца удлинительной трубки; и механизм управления изгибом выполнен с возможностью приведения первой гибкой части в движение к ее дистальному концу при перемещении во втором направлении, а второй гибкой части - к ее проксимальному концу, тем самым заставляя привод поворачиваться ко второй стороне относительно дистального конца удлинительной трубки.
5. Хирургический инструмент по п. 4, в котором механизм управления изгибом дополнительно содержит вторую рейку управления изгибом, шестерня управления изгибом находится в зацеплении со второй рейкой управления изгибом, вращение шестерни управления изгибом заставляет вторую рейку управления изгибом двигаться вперед или назад, а вторая рейка управления изгибом жестко соединена с проксимальным концом второй гибкой части.
6. Хирургический инструмент по п. 4, в котором первая гибкая часть и вторая гибкая часть представляют собой сегментированные гибкие части.
7. Хирургический инструмент по п. 5, в котором рабочая часть представляет собой ручку для управления изгибом, а рабочая зона ручки для управления изгибом находится за пределами удлинительной трубки.
8. Хирургический инструмент по п. 7, в котором удлинительная трубка включает в себя внешнюю трубку, верхнюю внутреннюю трубку и нижнюю внутреннюю трубку, при этом верхняя внутренняя трубка, нижняя внутренняя трубка и внешняя трубка расположены коаксиально.
9. Хирургический инструмент по п. 4, в котором первая гибкая часть и вторая гибкая часть представляют собой тяговые элементы или тросики.
10. Хирургический инструмент по п. 8, в котором первая гибкая часть представляет собой левый гибкий тяговый элемент, вторая гибкая часть представляет собой правый гибкий тяговый элемент, первая рейка управления изгибом представляет собой рейку управления левым изгибом, вторая рейка управления изгибом представляет собой рейку управления правым изгибом, а левая рейка управления изгибом и правая рейка управления изгибом расположены соответственно с обеих сторон нижней внутренней трубки; левый гибкий тяговый элемент и правый гибкий тяговый элемент соответственно проходят через соединительный узел и соединяются с левой и правой сторонами привода вдоль центральной оси; верхняя сторона шестерни управления изгибом соединена с ручкой для управления изгибом, так что вращение ручки для управления изгибом приводит в действие шестерню управления изгибом, а также приводит в действие левую и правую рейки управления изгибом, перемещая их вперед или назад, соответственно, левый гибкий тяговый элемент перемещается вперед или назад, а правая рейка управления изгибом приводит в действие правый гибкий тяговый элемент для перемещения вперед или назад.
11. Хирургический инструмент по любому из пп. 1-3, в котором проксимальный конец удлинительной трубки снабжен взаимосвязанными верхней крышкой и нижней крышкой поворотной головки, механизм управления изгибом расположен между верхней крышкой и нижней крышкой поворотной головки, а ручка для управления изгибом соединена с возможностью вращения с верхней крышкой поворотной головки через штифт ручки для управления изгибом.
12. Хирургический инструмент по любому из пп. 1-3, 5, 7-10, в котором угол поворота привода по меньшей мере в одну сторону относительно дистального конца удлинительной трубки составляет 0°, 30°, 45°, 60°, 90°, 120°, 135° или 180°.
13. Хирургический инструмент по любому из пп. 1-3, 5, 7-10, в котором хирургический инструмент представляет собой эндоскопический степлер.
| ДИСТАНЦИОНИРУЮЩИЙ ЭЛЕМЕНТ ДЛЯ ПРИМЕНЕНИЯ С ФОТОЭЛЕКТРИЧЕСКИМИ УСТРОЙСТВАМИ | 2018 |
|
RU2772198C2 |
| EP 3338660 A1, 27.06.2018 | |||
| EP 3042617 A2, 13.07.2016 | |||
| Способ ускоренного обучения основным техническим навыкам эхокардиографии с использованием симуляционных технологий | 2020 |
|
RU2751749C1 |
