ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[001] Настоящее изобретение относится к области позиционирования подземной однорельсовой подвижной лебедки внутри угольной шахты, в частности, к высокоточной системе позиционирования подземной однорельсовой подвижной лебедки внутри угольной шахты и способу такого позиционирования.
УРОВЕНЬ ТЕХНИКИ
[002] Однорельсовая локомотивная лебедка представляет собой локомотивную лебедку, движущуюся по двутавровой балке особой конструкции над штреком шахты. Подземные работы все чаще ведутся без участия людей, поэтому в интересах безопасности машинистов однорельсовую локомотивную лебедку необходимо точно позиционировать, чтобы ею можно было управлять удаленно. Однако поскольку сигналы GPS нельзя использовать в штреках, где работают однорельсовые лебедки, в существующем уровне техники для позиционирования лебедки чаще всего используются технологии со сверхширокой полосой пропускания (СШПП). В технологии позиционирования СШПП используются сетевые сигналы, поэтому для работы однорельсовой лебедки требуется заранее установить сетевое оборудование с базовыми станциями, при этом расходы на обустройство и обслуживание такой инфраструктуры достаточно высоки. При выходе из строя одного из узлов сетевой инфраструктуры СШПП-позиционирование дает сбой и не позволяет обеспечить точное позиционирование однорельсовой лебедки в дальнейшем. Таким образом, задача высокоточного позиционирования однорельсовой ледки в рамках инфраструктуры «умных» шахт без участия человека является остроактуальной.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[003] Принимая во внимание вышеперечисленные технические недостатки, задача настоящего изобретения состоит в том, чтобы предложить высокоточную систему позиционирования подземной однорельсовой подвижной лебедки внутри угольной шахты и способ такого позиционирования на основе высокоточного контакта между колесом позиционирования и направляющей двутавровой балки и последующего расчета смещения колеса позиционирования для получения точных позиционных координат однорельсовой подвижной лебедки.
[004] Для достижения поставленной задачи в настоящем изобретении предлагаются следующие технические решения.
[005] В настоящем изобретении раскрывается высокоточная система позиционирования подземной однорельсовой подвижной лебедки внутри угольной шахты и способ такого позиционирования. Система включает в себя:
устройство для измерения смещения зубчатого типа и несколько установок координатного позиционирования, равномерно распределенных на двутавровой направляющей. Устройство для измерения смещения зубчатого типа включает в себя два картера шестерней, симметрично расположенных по обеим сторонам двутавровой направляющей, и два картера шестерней, жестко соединенных друг с другом.
[006] У каждого картера шестерней имеется колесо позиционирования и несколько ходовых колес. Ходовые колеса движутся по верхней торцевой поверхности нижней пластины двутавровой направляющей, а колесо позиционирования сцеплено с планкой на верхней торцевой поверхности нижней пластины двутавровой направляющей.
[007] Картеры шестерней также оснащены крепежным кронштейном и соединительным гнездом для соединения с однорельсовой лебедкой. На крепежном кронштейне имеется инерциальный измерительный блок и однокристальный микрокомпьютер, подключенные друг к другу с помощью электрического соединения.
[008] Колесо позиционирования оснащено датчиком угла поворота, настроенном таким образом, чтобы определять угол поворота колеса позиционирования, при этом датчик угла поворота подключен к однокристальном микрокомпьютеру с помощью электрического соединения.
[009] Бабки с обеих концов однорельсовой лебедки оснащены блоком обновления координат, способным обмениваться сигналами с установкой координатного позиционирования, при этом такой блок подключен к однокристальном микрокомпьютеру с помощью электрического соединения.
[0010] В настоящем изобретении также раскрывается способ позиционирования для системы позиционирования подземной однорельсовой подвижной лебедки внутри угольной шахты. Предложенный способ включает в себя следующие этапы.
[0011] На этапе S1 на компьютере моделируется глобальный маршрут всех двутавровых направляющих.
[0012] На этапе S2 информация о местоположении и поведении однорельсовой лебедки передается с инерциального измерительного блока, благодаря чему определяется направление хода однорельсовой лебедки и составляется маршрут ее движения в режиме реального времени.
[0013] На этапе S3 приводятся в рабочее состояние установки координатного позиционирования, которые передают информацию о своем местоположении в трехмерной системе координат.
[0014] На этапе S4 с помощью однокристального микрокомпьютера рассчитывается расстояние хода однорельсовой лебедки между двумя ближайшими установками координатного позиционирования с использованием угловых данных, полученных от датчика угла поворота. Для расчета расстояния хода однорельсовой лебедки в прямом направлении полученная выше информация сводится с информацией о направлении движения, полученной от инерциального измерительного блока. Все эти сведения сводятся с данными о координатах однорельсовой лебедки на глобальном маршруте, полученном от предыдущей установки координатного позиционирования, для получения точных координат однорельсовой лебедки по трем измерениям между двумя установками координатного позиционирования.
[0015] На этапе S5 при прохождении однорельсовой лебедки через установку координатного позиционирования точное местоположение лебедки корректируется с помощью установки координатного позиционирования с обновлением координат лебедки в трех измерениях на глобальном маршруте.
[0016] Одновременно с этим происходит автоматическая инициализация данных, поступивших от инерциального измерительного блока и датчика угла поворота и выполняется позиционирование между двумя следующими установками координатного позиционирования согласно способу, описанному для этапа S4, при этом в качестве точки отсчета используется точка обновления.
[0017] На этапе S6 повторяются действия, описанные для этапов S4 и S5, в результате чего точные координаты однорельсовой лебедки в трех измерениях отображаются на глобальном маршруте в режиме реального времени.
[0018] В настоящем изобретении раскрываются следующие предпочтительные варианты осуществления способа на этапе S1.
[0019] На этапе S1-1 выполняется предварительное сканирование двутавровых направляющих лазерным радаром для получения облака точек двутавровых направляющих, а также находящихся рядом нерелевантных точек, после чего все данные облака точек передаются на компьютер.
[0020] На этапе S1-2 данные облака точек двутавровых направляющих и облака находящихся рядом нерелевантных точек обрабатываются с целью отфильтровывания данных по нерелевантным точкам и сохранения только облака точек двутавровых направляющих, после чего на компьютере по облаку точек двутавровых направляющих строится трехмерная объемная модель направляющих.
[0021] На этапе S1-3 исходя из трехмерной объемной модели направляющих, центральные линии на нижних поверхностях направляющих принимаются в качестве глобального маршрута, в компьютере определяются координаты каждой точки глобального маршрута по трем измерениям, после чего глобальный маршрут с координатами передается на однокристальный микрокомпьютер.
[0022] Ниже раскрывается предпочтительный сценарий применения инерциального измерительного блока на этапе S2.
[0023] На этапе S2-1 при движении однорельсовой лебедки по прямолинейному отрезку пути расстояние хода лебедки определяется с помощью инерциального измерительного блока.
[0024] На этапе S2-2 на подходе однорельсовой лебедки к поворотам инерциальный измерительный блок распознает один поворот, в который входит лебедка.
[0025] Ниже раскрываются предпочтительные варианты расположения установок координатного позиционирования на этапе S3.
[0026] Сначала по одной установке координатного позиционирования располагается на стартовой точке захода лебедки на двутавровую направляющую и на каждом повороте.
[0027] Затем между двумя соседними установками координатного позиционирования, расположенными, как указано выше, на расстоянии d друг от друга размещается несколько других установок координатного позиционирования.
[0028] Если расстояние s между установкой координатного позиционирования № k и установкой координатного позиционирования на следующем повороте составляет d<s<2d, размещается установка координатного позиционирования № (k+1).
[0029] Если расстояние s между установкой координатного позиционирования № k и установкой координатного позиционирования на следующем повороте составляет 0<s<d, установка координатного позиционирования № (k+1) не размещается.
[0030] Таким образом все имеющиеся установки координатного позиционирования размещаются, как описано в раскрываемом способе.
[0031] Ниже раскрываются предпочтительные варианты определения расстояния d согласно этапу S3.
[0032] Сначала рассчитывается функция погрешности с накоплением по времени f(t) в соответствии с техническими параметрами выбранного инерциального измерительного блока.
[0033] Затем максимальная допустимая накопительная погрешность инерциального измерительного блока принимается за Δmax, при этом f(t1)=Δmax с определением t1. Расстояние пробега d≤v*t1 вычисляется в соответствии с этими данными и информацией о средней скорости пробега однорельсовой лебедки, при этом расстояние пробега d должно быть меньше или равно расстоянию хода при максимально допустимой погрешности смещения для колеса позиционирования.
[0034] Далее описывается предпочтительный способ расчета расстояния, пройденного однорельсовой лебедкой, на однокристальном микрокомпьютере: смещение однорельсовой лебедки принимается за S, общая длина дуги, образованной за счет вращения колеса позиционирования, принимается за L, угол поворота колеса позиционирования принимается за n, радиус окружности, описываемой колесом позиционирования, принимается за r, а S=L=nr.
[0035] В предпочтительном варианте осуществления изобретения устройство координатного позиционирования представляет собой штрихкод, который включает в себя координаты устройства координатного позиционирования на глобальном маршруте. Устройство обновления координат представляет собой лазерный сканер, который сканирует устройство координатного позиционирования для обновления координат местоположения однорельсовой лебедки.
[0036] Настоящее изобретение позволяет добиться следующего полезного эффекта.
[0037] 1. Настоящее изобретение позволяет получить точные данные о расстоянии, пройденном однорельсовой лебедкой, исходя из расчета длины дуги вращения колеса позиционирования, и местоположении однорельсовой лебедки на двутавровой направляющей в сравнении со смоделированным глобальным маршрутом. Поскольку точность позиционирования находится в зависимости от размера колеса позиционирования, ее можно улучшить за счет уменьшения высоты колеса позиционирования.
[0038] 2. В текущем уровне техники широко используется одометр, однако в настоящем изобретении одометр сложно использовать для измерения пробега, поскольку колесо, на которое он устанавливается, проскальзывает во время хода. В настоящем изобретении шестерни сцеплены друг с другом, что позволяет уменьшить погрешность вычисления от проскальзывания колеса и улучшить точность позиционирования.
[0039] 3. В настоящем изобретении при каждом прохождении однорельсовой лебедки через установку координатного позиционирования данные от инерциального измерительного блока и датчика угла вращения инициализируются, что позволяет снизить погрешность инерциального измерительного блока, которая накапливается со временем.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0040] Чтобы представить более наглядное описание технических решений в вариантах осуществления настоящего изобретения, в настоящем разделе приводится краткое описание прилагаемых чертежей. Как следует из описаний, на чертежах схематично показаны некоторые варианты осуществления настоящего изобретения, при этом специалист в состоянии составить другие чертежи на основе прилагаемых без особых усилий.
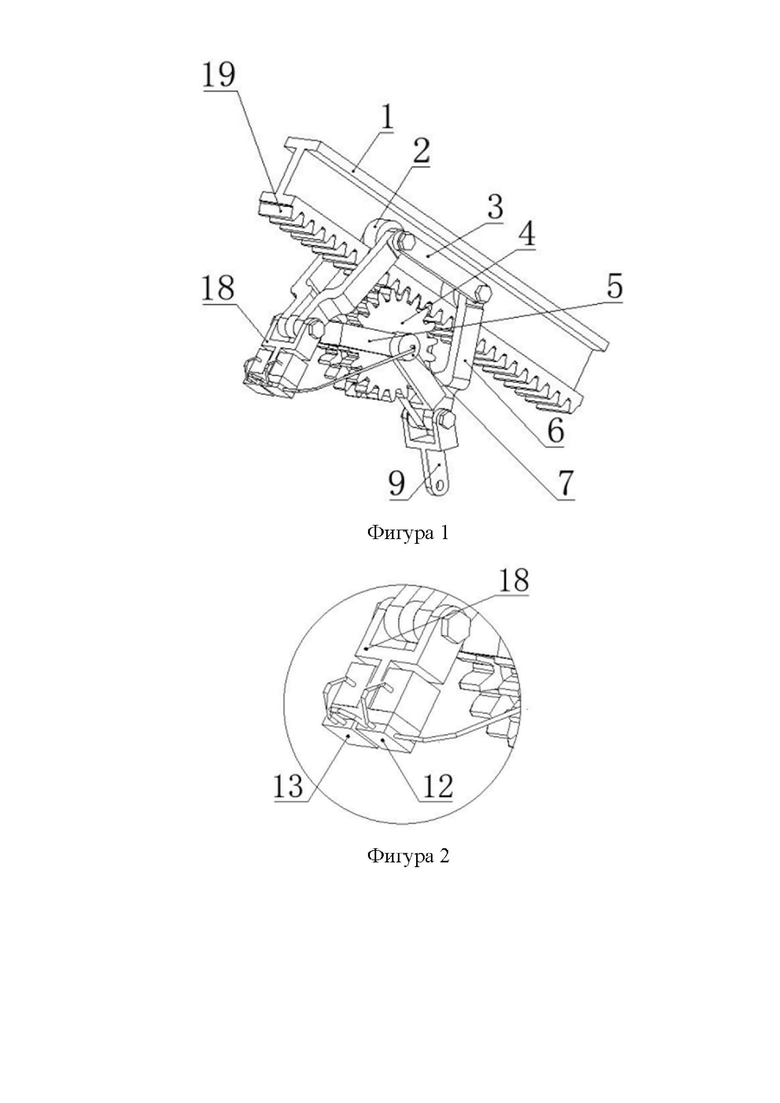
[0041] На Фигуре 1 показана конструктивная схема высокоточной системы позиционирования подземной однорельсовой подвижной лебедки внутри угольной шахты согласно одному из вариантов осуществления настоящего изобретения.
[0042] На Фигуре 2 показана схема установочного положения однокристального микрокомпьютера согласно одному из вариантов осуществления настоящего изобретения.
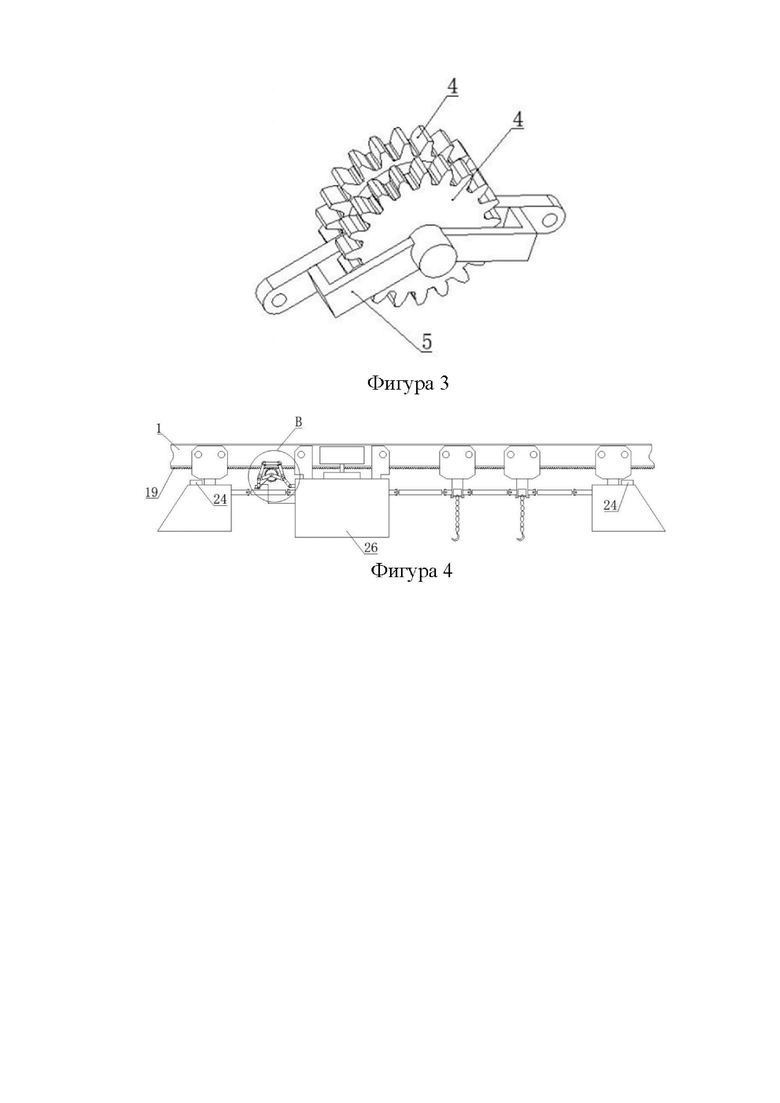
[0043] На Фигуре 3 показана схема взаиморасположения двух колес позиционирования согласно одному из вариантов осуществления настоящего изобретения.
[0044] На Фигуре 4 показана установочная схема высокоточной системы позиционирования подземной однорельсовой подвижной лебедки внутри угольной шахты согласно одному из вариантов осуществления настоящего изобретения.
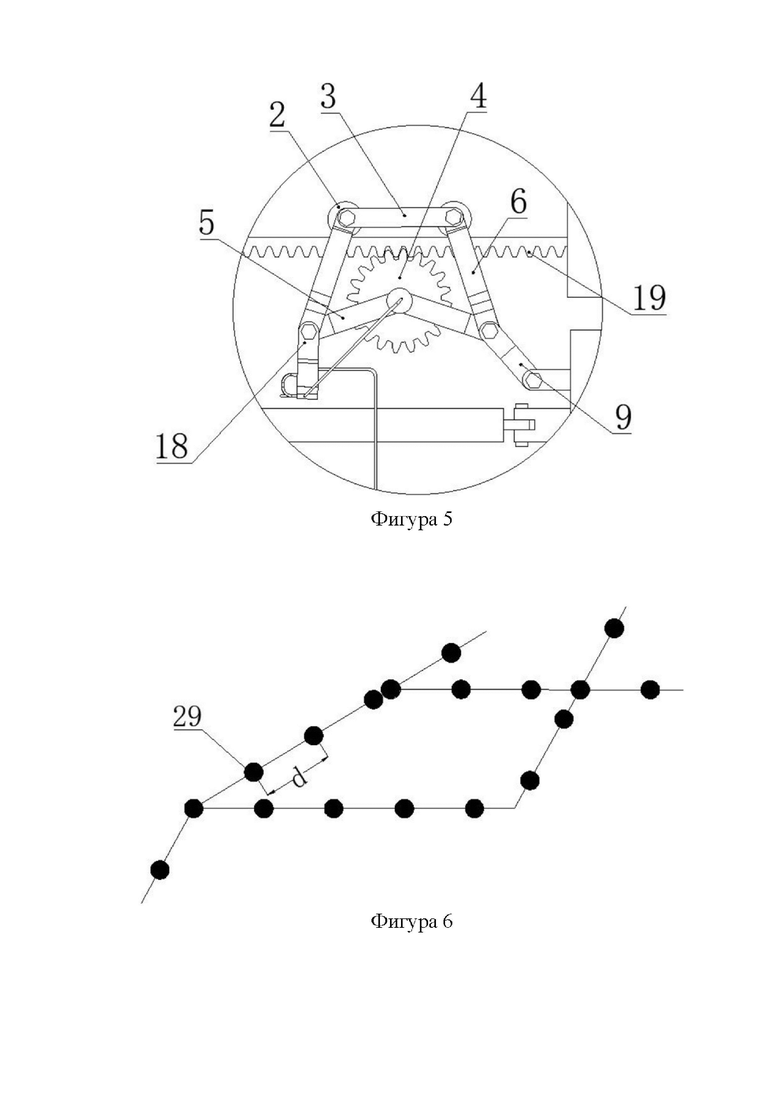
[0045] На Фигуре 5 показана в увеличенном виде деталь B с Фигуры 5 согласно одному из вариантов осуществления настоящего изобретения.
[0046] На Фигуре 6 показана карта глобального маршрута при установке и взаимном сочетании установок координатного позиционирования согласно одному из вариантов осуществления настоящего изобретения.
[0047] Номерами на чертежах обозначены:
[0048] 1. Двутавровая направляющая; 2. Ходовое колесо; 3. Шатун; 4. Колесо позиционирования; 5. Поперечная штанга; 6. Крепежная опора; 7. Датчик угла вращения; 9. Соединительное гнездо; 12. Однокристальный микрокомпьютер; 13. Инерциальный измерительный блок; 18. Крепежный кронштейн; 19. Планка; 24. Блок обновления координат; 26. Блок питания; 29. Устройство координатного позиционирования.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0049] Ниже приводится подробное описание технических решений согласно вариантам осуществления настоящего изобретения со ссылкой на прилагаемые чертежи. Описанные варианты осуществления представлены в качестве примера и не являются исчерпывающими для настоящего изобретения. Любые другие варианты осуществления, разработанные специалистами на основе вариантов осуществления согласно настоящему изобретению без творческих усилий, подпадают в сферу патентной защиты настоящего изобретения.
[0050] Как показано на Фигурах 1-6, высокоточная система позиционирования подземной однорельсовой подвижной лебедки внутри угольной шахты включает в себя:
[0051] Устройство для измерения смещения зубчатого типа и несколько установок координатного позиционирования 29, равномерно распределенных на двутавровой направляющей 1.
[0052] Устройство для измерения смещения зубчатого типа включает в себя два картера шестерней, симметрично расположенных по обеим сторонам двутавровой направляющей 1, и два картера шестерней, жестко соединенных друг с другом.
[0053] У каждого картера шестерней имеется колесо позиционирования 4 и несколько ходовых колес 2. Ходовые колеса 2 движутся по верхней торцевой поверхности нижней пластины двутавровой направляющей 1, а колесо позиционирования 4 сцеплено с планкой 19 на верхней торцевой поверхности нижней пластины двутавровой направляющей 1. Высота колеса позиционирования 4 невелика, что удовлетворяет требованию о том, что точность позиционирования колеса позиционирования 4 должна быть больше, чем у инерциального измерительного блока 13.
[0054] Картеры шестерней также оснащены крепежным кронштейном 18 и соединительным гнездом 9 для соединения с однорельсовой лебедкой. На крепежном кронштейне 18 имеется инерциальный измерительный блок 13 и однокристальный микрокомпьютер 12, подключенные друг к другу с помощью электрического соединения.
[0055] Колесо позиционирования 4 оснащено датчиком угла поворота 7, настроенном таким образом, чтобы определять угол поворота колеса позиционирования 4, при этом датчик угла поворота подключен к однокристальном микрокомпьютеру 12 с помощью электрического соединения.
[0056] Бабки с обеих концов однорельсовой лебедки оснащены блоком обновления координат 24, способным обмениваться сигналами с установкой координатного позиционирования 29, при этом такой блок 24 подключен к однокристальном микрокомпьютеру 12 с помощью электрического соединения.
[0057] Однокристальный микрокомпьютер 12 сообщается с внешним центром управления, настроенным таким образом, чтобы с него можно было получать изображение и управлять однокристальным микрокомпьютером 12.
[0058] Каждый картер шестерни включает в себя шатун 3, два ходовых колеса 2, симметрично расположенных с обоих концов шатуна 3, две крепежных опоры 6, симметрично расположенных с обоих концов шатуна 3, крепежный кронштейн 18, закрепленный с одного конца крепежной опоры 6 на удалении от ходового колеса 2, соединительное гнездо 9, закрепленное с одного конца другой крепежной опоры 6 на удалении от ходового колеса 2. Два колеса позиционирования 4 свободно вращаются на одном валу, оба конца которого, соответственно, свободно соединены с опорной пластиной, на которой жестко закреплены две поперечных штанги 5, при этом эти штанги 5 в свою очередь жестко соединены с двумя крепежными опорами с соответствующей стороны.
[0059] В настоящем изобретении также раскрывается способ позиционирования для системы позиционирования подземной однорельсовой подвижной лебедки внутри угольной шахты. Предложенный способ включает в себя следующие этапы.
[0060] На этапе S1 на компьютере моделируется глобальный маршрут всех двутавровых направляющих 1.
[0061] Далее раскрываются следующие предпочтительные варианты осуществления способа на этапе S1.
[0062] На этапе S1-1 выполняется предварительное сканирование двутавровых направляющих 1 лазерным радаром для получения облака точек двутавровых направляющих 1, а также находящихся рядом нерелевантных точек, после чего все данные облака точек передаются на компьютер.
[0063] На этапе S1-2 данные облака точек двутавровых направляющих 1 и облака находящихся рядом нерелевантных точек обрабатываются с целью отфильтровывания данных по нерелевантным точкам и сохранения только облака точек двутавровых направляющих 1, после чего на компьютере по облаку точек двутавровых направляющих 1 строится трехмерная объемная модель направляющих 1.
[0064] На этапе S1-3 исходя из трехмерной объемной модели направляющих 1, центральные линии на нижних поверхностях направляющих 1 принимаются в качестве глобального маршрута, в компьютере определяются координаты каждой точки глобального маршрута по трем измерениям, после чего глобальный маршрут с координатами передается на однокристальный микрокомпьютер 12.
[0065] На этапе S2 информация о местоположении и поведении однорельсовой лебедки передается с инерциального измерительного блока 13, благодаря чему определяется направление хода однорельсовой лебедки и составляется маршрут ее движения в режиме реального времени.
[0066] Ниже представлен сценарий применения инерциального измерительного блока 13.
[0067] На этапе S2-1 при движении однорельсовой лебедки по прямолинейному отрезку пути расстояние хода лебедки определяется с помощью инерциального измерительного блока 13.
[0068] На этапе S2-2 на подходе однорельсовой лебедки к поворотам инерциальный измерительный блок 13 распознает один поворот, в который входит лебедка.
[0069] На этапе S3 приводятся в рабочее состояние установки координатного позиционирования 29, которые передают информацию о своем местоположении в трехмерной системе координат.
[0070] Ниже раскрываются предпочтительные варианты расположения установок координатного позиционирования 29 на этапе S3.
[0071] Сначала по одной установке координатного позиционирования 29 располагается на стартовой точке захода лебедки на двутавровую направляющую 1 и на каждом повороте.
[0072] Затем между двумя соседними установками координатного позиционирования 29, расположенными, как указано выше, на расстоянии d друг от друга размещается несколько других установок координатного позиционирования 29.
[0073] Если расстояние s между установкой координатного позиционирования 29 № k и установкой координатного позиционирования 29 на следующем повороте составляет d<s<2d, размещается установка координатного позиционирования 29 № (k+1).
[0074] Если расстояние s между установкой координатного позиционирования 29 № k и установкой координатного позиционирования 29 на следующем повороте составляет 0<s<d, установка координатного позиционирования 29 № (k+1) не размещается.
[0075] Таким образом все имеющиеся установки координатного позиционирования 29 размещаются, как описано в раскрываемом способе.
[0076] Ниже раскрываются предпочтительные варианты определения расстояния d согласно этапу S3.
[0077] Сначала рассчитывается функция погрешности с накоплением по времени f(t) в соответствии с техническими параметрами выбранного инерциального измерительного блока 13.
[0078] Затем максимальная допустимая накопительная погрешность инерциального измерительного блока 13 принимается за Δmax, при этом f(t1)=Δmax с определением t1. Расстояние пробега d≤v*t1 вычисляется в соответствии с этими данными и информацией о средней скорости пробега однорельсовой лебедки, при этом расстояние пробега d должно быть меньше или равно расстоянию хода при максимально допустимой погрешности смещения для колеса позиционирования 4.
[0079] На этапе S4 с помощью однокристального микрокомпьютера 12 рассчитывается расстояние хода однорельсовой лебедки между двумя ближайшими установками координатного позиционирования 29 с использованием угловых данных, полученных от датчика угла поворота. Для расчета расстояния хода однорельсовой лебедки в прямом направлении полученная выше информация сводится с информацией о направлении движения, полученной от инерциального измерительного блока 13. Все эти сведения сводятся с данными о координатах однорельсовой лебедки на глобальном маршруте, полученном от предыдущей установки координатного позиционирования 29, для получения точных координат однорельсовой лебедки по трем измерениям между двумя установками координатного позиционирования 29.
[0080] Далее описывается предпочтительный способ расчета расстояния, пройденного однорельсовой лебедкой, на однокристальном микрокомпьютере 12: смещение однорельсовой лебедки принимается за S, общая длина дуги, образованной за счет вращения колеса позиционирования 4, принимается за L, угол поворота колеса позиционирования 4 принимается за n, радиус окружности, описываемой колесом позиционирования 4, принимается за r, а S=L=nr.
[0081] На этапе S5 при прохождении однорельсовой лебедки через установку координатного позиционирования 29 точное местоположение лебедки корректируется с помощью установки координатного позиционирования 29 с обновлением координат лебедки в трех измерениях на глобальном маршруте.
[0082] Одновременно с этим происходит автоматическая инициализация данных, поступивших от инерциального измерительного блока 13 и датчика угла поворота 7 и выполняется позиционирование между двумя следующими установками координатного позиционирования 29 согласно способу, описанному для этапа S4, при этом в качестве точки отсчета используется точка обновления.
[0083] На этапе S6 повторяются действия, описанные для этапов S4 и S5, в результате чего точные координаты однорельсовой лебедки в трех измерениях отображаются на глобальном маршруте в режиме реального времени.
[0084] Устройство координатного позиционирования 29 представляет собой штрихкод, который включает в себя координаты устройства координатного позиционирования 29 на глобальном маршруте. Устройство обновления координат 24 представляет собой лазерный сканер, который сканирует устройство координатного позиционирования 29 для обновления координат местоположения однорельсовой лебедки.
[0085] Согласно предпочтительному варианту осуществления настоящего изобретения, датчик угла вращения представляет собой угловой датчик модели MCJS. Исходя из характеристик датчика угла вращения 7, погрешность измерения угла составляет примерно 0.05%, что означает, что погрешность измерения расстояния будет равняться примерно 5 см на каждые 100 м хода однорельсовой лебедки. С другой стороны, точность позиционирования колеса позиционирования 4 можно улучшить путем уменьшения его высоты. При высоте колеса позиционирования равной 5 мм однокристальный микрокомпьютер 12 при расчете смещения колеса позиционирования 4 увеличивает получившееся значение на 5 мм. Аналогичным образом, при высоте колеса позиционирования равной 1 мм однокристальный микрокомпьютер 12 при расчете смещения колеса позиционирования 4 увеличивает получившееся значения на 1 мм, следовательно, чем меньше величина, на которую увеличивается получившееся значения, тем точнее позиционирование. Кроме того, точность позиционирования колеса позиционирования 4 также можно увеличить путем настройки позиционирования установки координатного позиционирования 29. Следовательно, точность позиционирования согласно настоящему изобретению является регулируемой.
[0086] По сравнению с технологией позиционирования СШПП, в которой используется беспроводной способ передачи сигнала, где точность позиционирования внутри помещения достигает 10 см, точность позиционирования в данном способе ниже из-за сложной конфигурации подземной инфраструктуры шахты.
[0087] Инерциальный измерительный блок 13 способен выдавать только данные об угловой скорости и ускорении и не может напрямую показывать смещение без интегрированного устройства. Однако при этом устройство интеграции со временем накапливает погрешность, чья величина возрастает по мере увеличения времени наработки. Например, для высокоточного оптоволоконного инерциального навигационного устройства погрешность при расчете пройденного расстояния составит около 80 см на каждые 100 м хода однорельсовой лебедки.
[0088] В текущем уровне техники одометр устанавливается напрямую на ведущее колесо. В случае частого запуска и остановки лебедки погрешность позиционирования растет до неприемлемого значения в связи с проскальзыванием колеса и не может удовлетворять заявленным требованиям.
[0089] Несмотря на то, что принцип работы и особенности вариантов осуществления настоящего изобретения описаны со ссылкой на конкретные примеры, эти описания приводятся лишь для лучшего понимания смысла настоящего изобретения. В варианты осуществления настоящего изобретения специалисты могут вносить различные изменения, а любые представленные здесь описания не могут считаться ограничивающими смысл настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автономного позиционирования для шахтного электровоза с взрывобезопасной аккумуляторной батареей | 2022 |
|
RU2810800C1 |
| Способ создания трека пути движения для автономного движения подвижного объекта и способ осуществления автономного движения подвижного объекта по треку пути движения | 2018 |
|
RU2691679C1 |
| СИСТЕМА КОНТРОЛЯ ПУТИ | 2020 |
|
RU2810283C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ И НАВИГАЦИИ | 2014 |
|
RU2608971C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНОГО РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА НА ЖЕЛЕЗНОДОРОЖНОМ ПУТИ | 2015 |
|
RU2579606C1 |
| СОЗДАНИЕ СТРУКТУРИРОВАННЫХ КАРТОГРАФИЧЕСКИХ ДАННЫХ С ПОМОЩЬЮ ДАТЧИКОВ ТРАНСПОРТНОГО СРЕДСТВА И МАССИВОВ КАМЕР | 2020 |
|
RU2772620C1 |
| Способ определения траектории объекта в окружающем пространстве для построения 3D карты | 2024 |
|
RU2830723C1 |
| Способ навигации с интеграцией систем и средств обеспечения сквозного позиционирования повышенной точности и устойчивости к помехам | 2023 |
|
RU2836625C1 |
| СПОСОБ ОБРАБОТКИ ДАННЫХ ПОЗИЦИОНИРОВАНИЯ | 2008 |
|
RU2501087C2 |
| Способ коррекции бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата малой дальности с использованием интеллектуальной системы геопространственной информации | 2019 |
|
RU2722599C1 |
Изобретение относится к высокоточным системам позиционирования подземной однорельсовой подвижной лебедки внутри угольной шахты. Система включает в себя устройство для измерения смещения зубчатого типа и несколько установок координатного позиционирования, равномерно распределенных на двутавровой направляющей. Устройство для измерения смещения зубчатого типа включает в себя два картера шестерней, симметрично расположенных по обеим сторонам двутавровой направляющей, и два картера шестерней, жестко соединенных друг с другом. У каждого картера шестерней имеется колесо позиционирования и несколько ходовых колес. Ходовые колеса движутся по верхней торцевой поверхности нижней пластины двутавровой направляющей, а колесо позиционирования сцеплено с планкой на верхней торцевой поверхности нижней пластины двутавровой направляющей. Картеры шестерней также оснащены крепежным кронштейном и соединительным гнездом для соединения с однорельсовой лебедкой. На крепежном кронштейне имеется инерциальный измерительный блок и однокристальный микрокомпьютер, подключенные друг к другу с помощью электрического соединения. Колесо позиционирования оснащено датчиком угла поворота, настроенным таким образом, чтобы определять угол поворота колеса позиционирования, при этом датчик угла поворота подключен к однокристальном микрокомпьютеру с помощью электрического соединения. Бабки с обоих концов однорельсовой лебедки оснащены блоком обновления координат, способным обмениваться сигналами с установкой координатного позиционирования. Достигается высокоточный контакт между колесом позиционирования и направляющей двутавровой балки и последующий расчет смещения колеса позиционирования для получения точных позиционных координат однорельсовой подвижной лебедки. 2 н. и 6 з.п. ф-лы, 6 ил.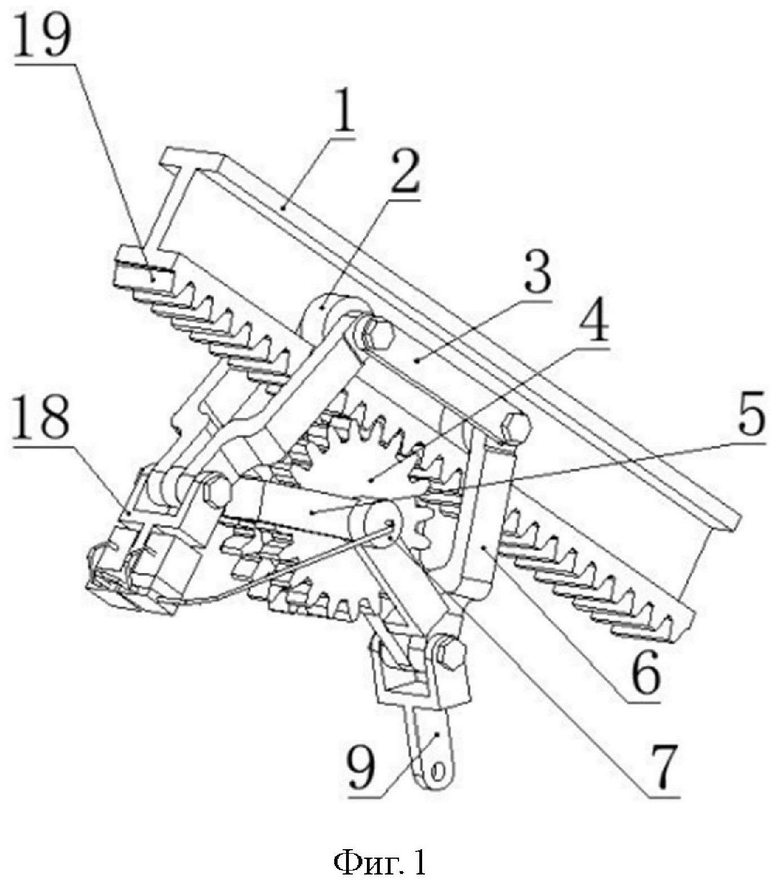
1. Высокоточная система позиционирования подземной однорельсовой подвижной лебедки внутри угольной шахты, которая включает в себя:
устройство для измерения смещения зубчатого типа и несколько установок координатного позиционирования (29), равномерно распределенных на двутавровой направляющей (1),
характеризующаяся тем, что устройство для измерения смещения зубчатого типа включает в себя два картера шестерней, симметрично расположенных по обеим сторонам двутавровой направляющей (1), и два картера шестерней, жестко соединенных друг с другом;
у каждого картера шестерней имеется колесо позиционирования (4) и несколько ходовых колес (2), ходовые колеса (2) движутся по верхней торцевой поверхности нижней пластины двутавровой направляющей (1), а колесо позиционирования (4) сцеплено с планкой (19) на верхней торцевой поверхности нижней пластины двутавровой направляющей (1);
картеры шестерней также оснащены крепежным кронштейном (18) и соединительным гнездом (9) для соединения с однорельсовой лебедкой, на крепежном кронштейне (18) имеется инерциальный измерительный блок (13) и однокристальный микрокомпьютер (12), подключенные друг к другу с помощью электрического соединения;
колесо позиционирования (4) оснащено датчиком угла поворота (7), настроенным таким образом, чтобы определять угол поворота колеса позиционирования (4), при этом датчик угла поворота подключен к однокристальном микрокомпьютеру (12) с помощью электрического соединения;
бабки с обоих концов однорельсовой лебедки оснащены блоком обновления координат (24), способным обмениваться сигналами с установкой координатного позиционирования (29), при этом такой блок (24) подключен к однокристальном микрокомпьютеру (12) с помощью электрического соединения.
2. Способ позиционирования для системы позиционирования подземной однорельсовой подвижной лебедки внутри угольной шахты, включающий в себя следующие этапы:
этап S1, где на компьютере моделируется глобальный маршрут всех двутавровых направляющих (1);
этап S2, где информация о местоположении и поведении однорельсовой лебедки передается с инерциального измерительного блока (13), благодаря чему определяется направление хода однорельсовой лебедки и составляется маршрут ее движения в режиме реального времени;
этап S3, где приводятся в рабочее состояние установки координатного позиционирования (29), которые передают информацию о своем местоположении в трехмерной системе координат;
этап S4, где с помощью однокристального микрокомпьютера (12) рассчитывается расстояние хода однорельсовой лебедки между двумя ближайшими установками координатного позиционирования (29) с использованием угловых данных, полученных от датчика угла поворота; для расчета расстояния хода однорельсовой лебедки в прямом направлении полученная выше информация сводится с информацией о направлении движения, полученной от инерциального измерительного блока (13); все эти сведения сводятся с данными о координатах однорельсовой лебедки на глобальном маршруте, полученном от предыдущей установки координатного позиционирования (29), для получения точных координат однорельсовой лебедки по трем измерениям между двумя установками координатного позиционирования (29);
этап S5, где при прохождении однорельсовой лебедки через установку координатного позиционирования (29) точное местоположение лебедки корректируется с помощью установки координатного позиционирования (29) с обновлением координат лебедки в трех измерениях на глобальном маршруте;
одновременно с этим происходит автоматическая инициализация данных, поступивших от инерциального измерительного блока (13) и датчика угла поворота (7) и выполняется позиционирование между двумя следующими установками координатного позиционирования (29) согласно способу, описанному для этапа S4, при этом в качестве точки отсчета используется точка обновления;
на этапе S6 повторяются действия, описанные для этапов S4 и S5, в результате чего точные координаты однорельсовой лебедки в трех измерениях отображаются на глобальном маршруте в режиме реального времени.
3. Способ по п. 2, отличающийся тем, что этап S1 включает в себя следующие подэтапы:
этап S1-1, где выполняется предварительное сканирование двутавровых направляющих (1) лазерным радаром для получения облака точек двутавровых направляющих (1), а также находящихся рядом нерелевантных точек, после чего все данные облака точек передаются на компьютер;
этап S1-2, где данные облака точек двутавровых направляющих (1) и облака находящихся рядом нерелевантных точек обрабатываются с целью отфильтровывания данных по нерелевантным точкам и сохранения только облака точек двутавровых направляющих (1), после чего на компьютере по облаку точек двутавровых направляющих (1) строится трехмерная объемная модель направляющих (1);
этап S1-3, где исходя из трехмерной объемной модели направляющих (1) центральные линии на нижних поверхностях направляющих (1) принимаются в качестве глобального маршрута, в компьютере определяются координаты каждой точки глобального маршрута по трем измерениям, после чего глобальный маршрут с координатами передается на однокристальный микрокомпьютер (12).
4. Способ по п. 3, отличающийся тем, что используют следующий сценарий применения инерциального измерительного блока (13) на этапе S2:
этап S2-1, где при движении однорельсовой лебедки по прямолинейному отрезку пути расстояние хода лебедки определяется с помощью инерциального измерительного блока (13);
этап S2-2, где на подходе однорельсовой лебедки к поворотам инерциальный измерительный блок (13) распознает один поворот, в который входит лебедка.
5. Способ по п. 4, отличающийся тем, что используют следующий вариант расположения установок координатного позиционирования (29) на этапе S3:
сначала по одной установке координатного позиционирования (29) располагается на стартовой точке захода лебедки на двутавровую направляющую (1) и на каждом повороте;
затем между двумя соседними установками координатного позиционирования (29), расположенными, как указано выше, на расстоянии d друг от друга размещается несколько других установок координатного позиционирования (29);
если расстояние s между установкой координатного позиционирования (29) № k и установкой координатного позиционирования (29) на следующем повороте составляет d<s<2d, размещается установка координатного позиционирования (29) № (k+1);
если расстояние s между установкой координатного позиционирования (29) № k и установкой координатного позиционирования (29) на следующем повороте составляет 0<s<d, установка координатного позиционирования (29) № (k+1) не размещается;
таким образом, все имеющиеся установки координатного позиционирования (29) размещаются как описано в раскрываемом способе.
6. Способ по п. 5, отличающийся тем, что используют следующий вариант определения расстояния d на этапе S3:
cначала рассчитывается функция погрешности с накоплением по времени f(t) в соответствии с техническими параметрами выбранного инерциального измерительного блока (13);
затем максимальная допустимая накопительная погрешность инерциального измерительного блока (13) принимается за Δmax, при этом f(t1)=Δmax с определением t1;
расстояние пробега d≤v*t1 вычисляется в соответствии с этими данными и информацией о средней скорости пробега однорельсовой лебедки, при этом расстояние пробега d должно быть меньше или равно расстоянию хода при максимально допустимой погрешности смещения для колеса позиционирования (4).
7. Способ по п. 2, отличающийся тем, что используют следующий способ определения расстояния, пройденного однорельсовой лебедкой, на однокристальном микрокомпьютере (12) на этапе S4: смещение однорельсовой лебедки принимается за S, общая длина дуги, образованной за счет вращения колеса позиционирования (4), принимается за L, угол поворота колеса позиционирования (4) принимается за n, радиус окружности, описываемой колесом позиционирования (4), принимается за r, а S=L=nr.
8. Способ по п. 2, отличающийся тем, что в качестве устройства координатного позиционирования (29) используют штрихкод, который включает в себя координаты устройства координатного позиционирования (29) на глобальном маршруте;
в качестве устройства обновления координат (24) используют лазерный сканер, который сканирует устройство координатного позиционирования (29) для обновления координат местоположения однорельсовой лебедки.
| CN 212315347 U, 08.01.2021 | |||
| Кран-штабелер | 1987 |
|
SU1504177A1 |
| CN 108862068 A, 23.11.2018. | |||
