Изобретение относится к области авиастроения, а точнее к способам и системам регулирования тангажа конвертоплана, и может применяться для управления тангажом конвертоплана.
Известно техническое решение «Трехвинтовой конвертоплан» (патент № RU2656957C1, МПК B64C 37/00, опубл. 07.06.2018). Трехвинтовой конвертоплан состоит из фюзеляжа с прикрепленным к нему крылом по схеме высокоплана, двухкилевого хвостового оперения, размещенных на передней кромке крыла двигателей с винтами и поворотного механизма, позволяющего изменять вектор тяги на 110° относительно горизонта для изменения режимов полета. Имеется дополнительная силовая установка с горизонтальным расположением винта, размещенная в хвостовой части горизонтального килевого оперения и служащая для стабилизации летательного аппарата (ЛА) по тангажу в вертолетном режиме полета, управления направлением движения конвертоплана, а также снабженная поворотным механизмом, позволяющим отклонять вектор тяги в вертикальной плоскости для компенсации крутящего момента, создаваемого передними силовыми установками, и управления рысканьем летательного аппарата в вертолетном и переходных режимах полета.
К недостаткам данного технического решения следует отнести уязвимость дополнительной силовой установки с горизонтальным расположением винта при взлете и посадке от неровностей подстилающей поверхности.
Наиболее близким по технической сущности является конвертоплан DOAK VZ-4, с соплом двигателя которого сопрягали трубу требуемой длины, которая проходила через всю хвостовую балку. На ней устанавливали специальное устройство с несколькими газовыми рулями. Такие системы управления отличала весьма простая конструкция. На срезе-сопле трубы располагали раму, на которой размещали подвижные вертикальную и горизонтальную пластины-рули. Управление потоком осуществляли путем отклонения рулей в нужных направлениях.
Однако существенным недостатком данного способа управления тангажом является отсутствие возможности достаточно оперативно реагировать на изменение вертикального положения ЛА, что чревато увеличением риска крушения конвертоплана.
Решаемой технической проблемой является создание высокоэффективного способа управления тангажом конвертоплана, позволяющего повысить маневренность конвертоплана, продольную устойчивость и безопасность данного ЛА при переходе от вертикального полета к горизонтальному/горизонтального полета к вертикальному при осуществлении взлета и посадки, в том числе и на протяжении всего полета.
Технический результат изобретения заключается в повышении маневренности, продольной устойчивости и безопасности конвертоплана при переходе от вертикального полета к горизонтальному/горизонтального полета к вертикальному при осуществлении взлета и посадки, в том числе и на протяжении всего полета.
Технический результат достигается тем, что за счет расположения пластины-руля в хвостовой части конвертоплана непосредственно за вентилятором создают кабрирующий момент, который появляется благодаря аэродинамической силе, действующей на плече от центра масс конвертоплана до центра давления пластины-руля, и возникающей вследствие обтекания пластины-руля выдуваемым вентилятором воздухом. Угол установки пластины-руля регулируют, тем самым изменяя величину и/или направление аэродинамической силы, возникающей при обтекании пластины-руля воздухом, выдуваемым вентилятором и выстраивают в зависимости от того, в какую сторону необходимо направить кабрирующий момент. Причем лопатки вентилятора являются поворотными. Тем самым повышается маневренность, управляемость тангажом конвертоплана, повышается устойчивость и безопасность конвертоплана при переходе от вертикального полета к горизонтальному/горизонтального полета к вертикальному при осуществлении взлета и посадки и на протяжении всего полета.
Описание чертежей
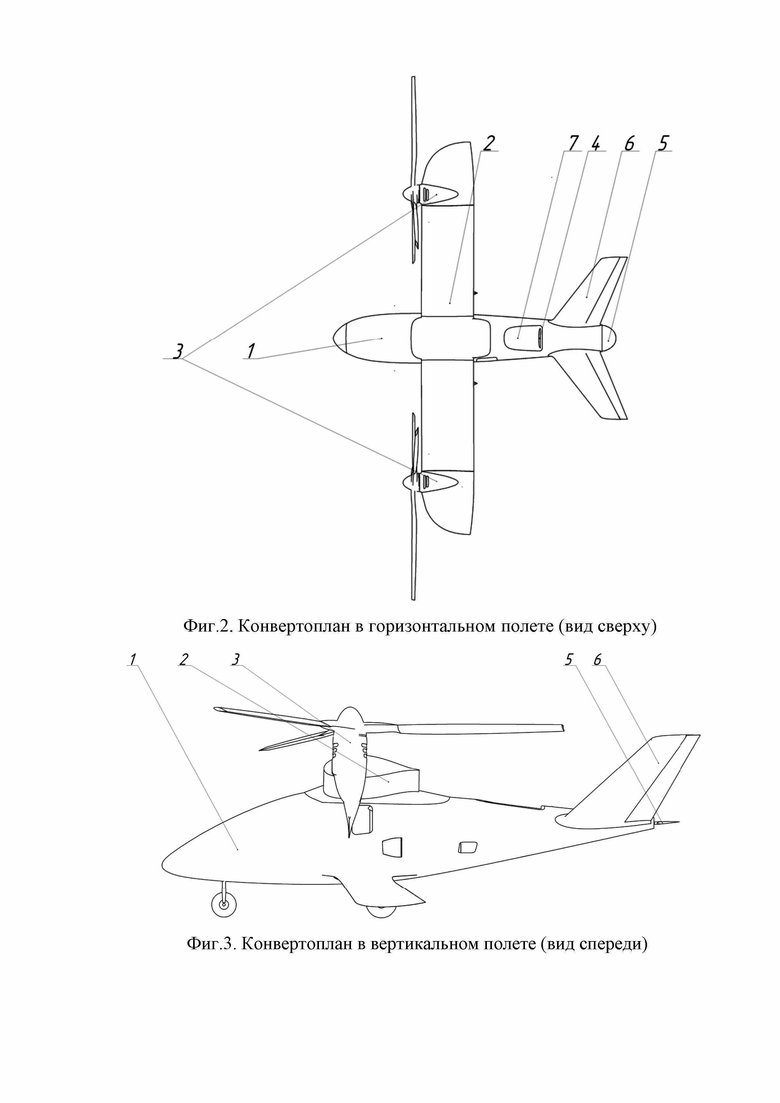
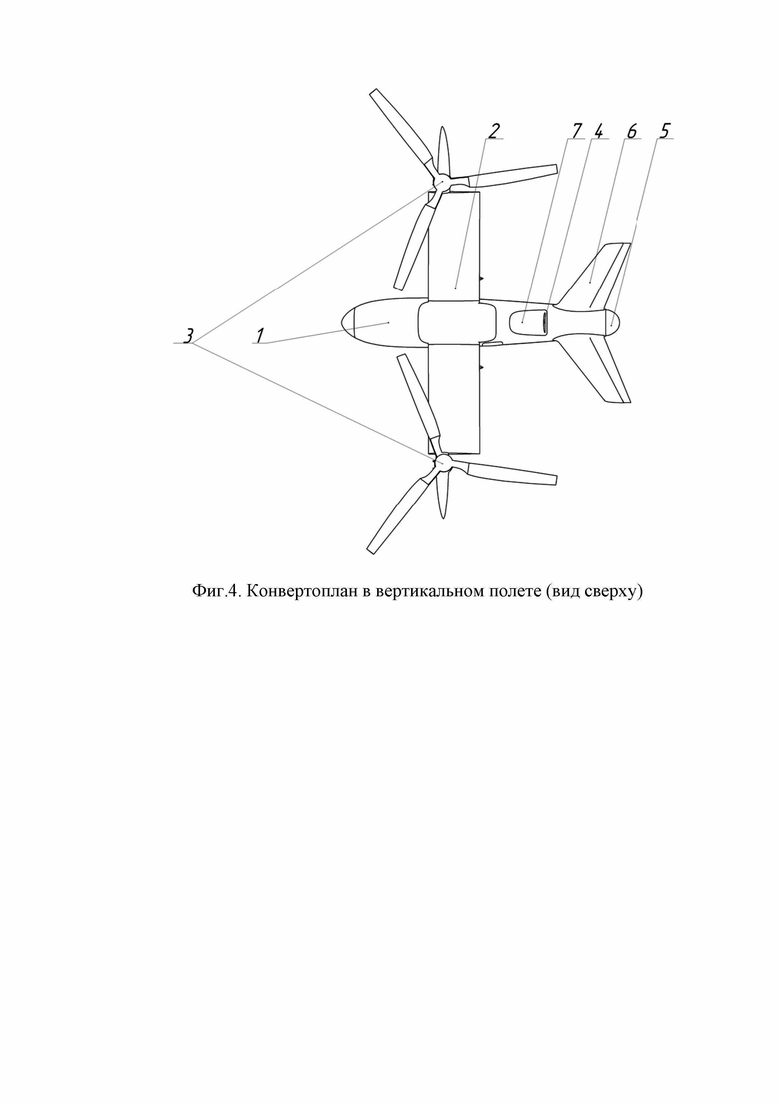
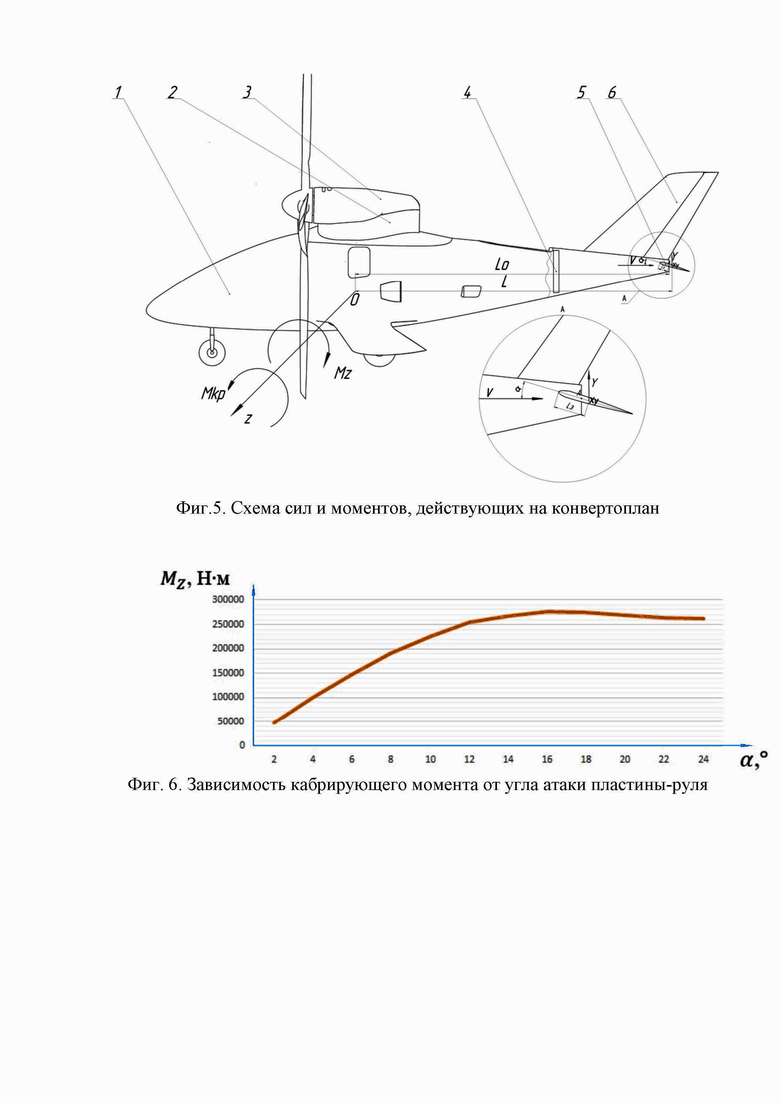
На фиг.1 и фиг. 2 представлены схемы горизонтального полета конвертоплана (виды спереди и сверху соответственно). На фиг.3 и фиг.4 представлены схемы вертикального полета конвертоплана (виды спереди и сверху соответственно). На фиг.5 показана схема сил и моментов, действующих на конвертоплан в полете.
Изобретение содержит фюзеляж 1 , который служит для размещения целевой нагрузки с прикрепленным к нему крылом 2 по схеме высокоплана; на передней кромке крыла 2 размещены мотогондолы 3 с двигателями, винтами и поворотным механизмом, позволяющим изменять вектор тяги относительно горизонта; при самолетном (крейсерском) режиме полета основное направление вектора тяги является горизонтальным и аэродинамическая сила создается за счет работы профиля крыла 2, а при полете в вертолетном режиме (зависание / вертикальный взлет и посадка) основное направление вектора тяги является вертикальным и подъемная сила создается за счет воздушной массы, отбрасываемой винтами; вентилятор 4 (лопатки которого являются поворотными), служащий для нагнетания воздуха на пластину-руль 5, при обтекании воздухом от вентилятора 4 которой появляется аэродинамическая сила, создающая кабрирующий момент с плечом от центра тяжести конвертоплана до центра давления пластины-руля 5; V-образное хвостовое оперение 6, служащее для стабилизации ЛА по рысканью и крену; воздухозаборник 7, служащий для подачи воздуха из внешней среды к вентилятору.
Устройство работает следующим образом.
Фюзеляж 1 служит для размещения целевой нагрузки, при самолетном (крейсерском) режиме полета основное направление вектора тяги является горизонтальным и аэродинамическая сила создается за счет работы профиля крыла 2, а при полете в вертолетном режиме (зависание / вертикальный взлет и посадка) основное направление вектора тяги является вертикальным и подъемная сила создается за счет воздушной массы, отбрасываемой винтами. V-образное хвостовое оперение 6 служит для стабилизации ЛА по рысканью и крену. Во время изменения направления вектора тяги основных силовых установок 3 из горизонтального в вертикальный и обратно, а также для осуществления режимов зависания и вертикального взлета/посадки, для стабилизации конвертоплана по тангажу нагнетают воздух на пластину-руль 5 при помощи вентилятора 4. Воздух из внешней среды поступает в воздухозаборник 7, затем оттуда подается на вентилятор 4. Возникает кабрирующий момент с плечом от центра масс до центра давления пластины-руля 5 от действия аэродинамической силы, возникающей при обтекании воздухом пластины-руля 5. Кабрирующий момент и выравнивает ЛА относительно горизонта, а также служит для маневрирования конвертопланом по тангажу. Управление тангажом осуществляется путем изменения угла установки пластины-руля 5, благодаря чему появляется возможность изменять аэродинамическую силу, возникающую при обтекании воздухом пластины-руля 5, и/или ее направление, в зависимости от того, в какую сторону необходимо направить кабрирующий момент. Также появляется возможность оперативного изменения величины кабрирующего момента за счет изменения угла установки лопаток вентилятора 4. Увеличение/уменьшение угла установки лопаток вентилятора приводит к увеличению/уменьшению скорости нагнетания на пластину-руль 5 воздуха, нагнетаемого вентилятором 4, благодаря чему возрастает/снижается величина аэродинамической силы, возникающей вследствие обтекания пластины-руля 5 воздухом, нагнетаемым вентилятором 4.
Для того, чтобы компенсировать внешний крутящий момент  относительно поперечной оси, проходящей через центр тяжести О конвертоплана, необходимо создать кабрирующий момент
относительно поперечной оси, проходящей через центр тяжести О конвертоплана, необходимо создать кабрирующий момент  , выражаемый равенством (1):
, выражаемый равенством (1):
 где
где
Y и L - подъемная сила и плечо действия этой силы соответственно.
Подъемная сила Y определяется следующей зависимостью (2):
 где
где
 - коэффициент подъемной силы, зависящий от угла атаки
- коэффициент подъемной силы, зависящий от угла атаки  ;
;
 - плотность набегающего потока (воздуха, нагнетаемого вентилятором вентилятором 4 на пластину-руль 5);
- плотность набегающего потока (воздуха, нагнетаемого вентилятором вентилятором 4 на пластину-руль 5);
 - площадь пластины-руля;
- площадь пластины-руля;
 - скорость набегающего потока (воздуха, нагнетаемого вентилятором вентилятором 4 на пластину-руль 5).
- скорость набегающего потока (воздуха, нагнетаемого вентилятором вентилятором 4 на пластину-руль 5).
Однако с изменением угла атаки меняется и положение точки  приложения подъемной силы Y по хорде пластины-руля 5 относительно его передней кромки. В связи с этим меняется и плечо действия L подъемной силы Y. Зная угол атаки , можно, исходя из зависимости (3), определить положение точки приложения подъемной силы Y по хорде пластины-руля 5 относительно его передней кромки:
приложения подъемной силы Y по хорде пластины-руля 5 относительно его передней кромки. В связи с этим меняется и плечо действия L подъемной силы Y. Зная угол атаки , можно, исходя из зависимости (3), определить положение точки приложения подъемной силы Y по хорде пластины-руля 5 относительно его передней кромки:
 где
где
 - коэффициент момента - число, зависящее от профиля крыла, угла атаки и той точки, относительно которой момент определяется.
- коэффициент момента - число, зависящее от профиля крыла, угла атаки и той точки, относительно которой момент определяется.
Пусть расстояние от передней кромки пластины-руля 5 до точки его закрепления будет  .Тогда плечо действия L подъемной силы Y выражается равенством (4):
.Тогда плечо действия L подъемной силы Y выражается равенством (4):
 где
где
 - расстояние от центра тяжести
- расстояние от центра тяжести  ЛА до точки закрепления А пластины-руля 5.
ЛА до точки закрепления А пластины-руля 5.
Подставляя выражения (2) и (4) в выражение (1) имеем зависимость (5):

или зависимость (6):

Пример 1.
Пусть имеются следующие данные:
• профиль пластины NASA-0006,
• плотность воздуха  ,
,
• скорость набегающего потока  ,
,
• площадь пластины-руля 5  =1
=1  ,
,
• расстояние от центра тяжести ЛА до точки закрепления А пластины-руля 5  ,
,
• расстояние от передней кромки пластины-руля 5 до точки его закрепления  =0,125 м.
=0,125 м.
Исходя из этих данных получена таблица 1 и фиг. 6 для большей наглядности.
Фиг.6 можно интерпретировать следующим образом: при угле атаки  создается кабрирующий момент
создается кабрирующий момент  =46848,27 Н
=46848,27 Н м, которым можно компенсировать внешний крутящий момент
м, которым можно компенсировать внешний крутящий момент  = -46848,27 Нм. Или же, чтобы компенсировать крутящий момент
= -46848,27 Нм. Или же, чтобы компенсировать крутящий момент  262709,2 Нм, необходимо выставить пластину-руль 5 под угол атаки
262709,2 Нм, необходимо выставить пластину-руль 5 под угол атаки  -24
-24 .
.
Таким образом, заявляемое техническое решение позволяет повысить маневренность, продольную устойчивость и безопасность конвертоплана при переходе от вертикального полета к горизонтальному, и наоборот при осуществлении взлета и посадки, в том числе и на протяжении всего полета. Появляется защищенность винта, необходимого для управления тангажом, за счет его нахождения внутри фюзеляжа. Данный способ управления тангажом конвертоплана позволяет с легкостью использовать его при транспортировке различных грузов, людей, техники, появляется возможность его посадки практически на любую поверхность (даже на наклонную), при этом отсутствует необходимость в специально оборудованных аэродромах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления тангажом конвертоплана | 2022 |
|
RU2820358C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 1996 |
|
RU2103199C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2008 |
|
RU2435707C2 |
| СПОСОБ КОМПЛЕКСНОГО ПОВЫШЕНИЯ АЭРОДИНАМИЧЕСКИХ И ТРАНСПОРТНЫХ ХАРАКТЕРИСТИК, ЭКРАНОПЛАН ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА (ВАРИАНТЫ) И СПОСОБ ВЫПОЛНЕНИЯ ПОЛЕТА | 2010 |
|
RU2539443C2 |
| САМОЛЕТ | 1993 |
|
RU2087384C1 |
| САМОЛЕТ ГОРИЗОНТАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2006 |
|
RU2350510C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ, СИСТЕМА УПРАВЛЕНИЯ ОТСОСОМ ПОГРАНИЧНОГО СЛОЯ, СИСТЕМА УПРАВЛЕНИЯ ВДУВОМ В ПОГРАНИЧНЫЙ СЛОЙ, УСТРОЙСТВО ФИКСАЦИИ ПОЛОЖЕНИЯ СХОДА ПОТОКА С ЗАДНЕЙ КРОМКИ ФЮЗЕЛЯЖА И ЕГО ВЗЛЕТНО-ПОСАДОЧНОЕ УСТРОЙСТВО НА ВОЗДУШНОЙ ПОДУШКЕ | 1992 |
|
RU2033945C1 |
| Конвертоплан | 2019 |
|
RU2723516C1 |
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2018 |
|
RU2742496C2 |

Изобретение относится к области авиастроения и касается способа регулирования тангажа конвертоплана. За счет расположения пластины-руля в хвостовой части конвертоплана непосредственно за вентилятором создают кабрирующий момент, который появляется благодаря аэродинамической силе, действующей на плече от центра масс конвертоплана до центра давления пластины-руля и возникающей вследствие обтекания пластины-руля выдуваемым вентилятором воздухом. Угол установки пластины-руля регулируется, изменяя величину и/или направление аэродинамической силы, возникающей при обтекании пластины-руля воздухом. Причем лопатки вентилятора выполнены поворотными для регулирования скорости нагнетаемого вентилятором воздуха. Достигается повышение маневренности, продольной устойчивости и безопасности при переходе от вертикального полета к горизонтальному/горизонтального полета к вертикальному при осуществлении взлета и посадки, в том числе и на протяжении всего полета. 6 ил., 1 табл. 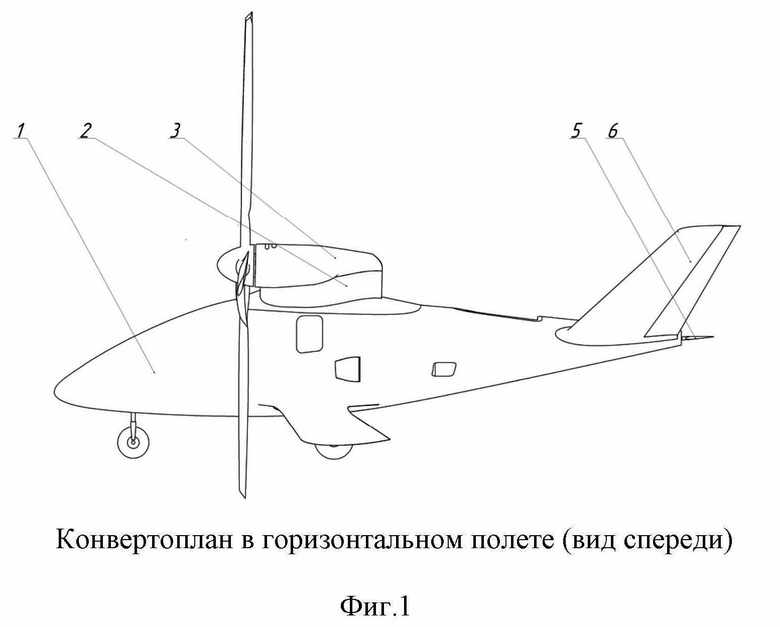
Способ управления тангажом конвертоплана, заключающийся в том, что в хвостовой части конвертоплана непосредственно за вентилятором располагают пластину-руль, при отклонении которой изменяется величина и/или направление аэродинамической силы, возникающей при обтекании пластины-руля воздухом, нагнетаемым вентилятором, куда воздух попадает из внешней среды через воздухозаборник, действие на плече от центра масс конвертоплана до центра давления пластины-руля которой создает кабрирующий момент, причем при помощи поворотных лопаток вентилятора появляется возможность регулировать скорость нагнетаемого вентилятором воздуха.
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С НЕСУЩИМ ВИНТОМ СО СВОРАЧИВАЮЩИМИСЯ УБИРАЕМЫМИ ЛОПАСТЯМИ | 2019 |
|
RU2727787C1 |
| Ионизационный манометр | 1960 |
|
SU141669A1 |
| БЕСПИЛОТНЫЙ РЕАКТИВНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2699513C1 |
| US 11077937 В1, 03.08.2021 | |||
| US 5984228 А1, 16.11.1999. | |||

