ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к устройствам для гашения колебаний рабочего инструмента тросового робота, а именно к тросовой системе с пассивным динамическим гасителем колебаний.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Гашение колебаний в тросовой системе робота предназначено для уменьшения амплитуд колебаний рабочего инструмента робота, перемещаемого с помощью тросовой системы. Рабочий инструмент робота представляет собой мобильную платформу с установленным на ней оборудованием Необходимость уменьшения амплитуды связана с тем, что на мобильной платформе тросового робота размещается оборудование, требующее точного позиционирования и ориентации. Задача гашения колебаний рабочего инструмента тросового робота является задачей многокритериальной оптимизации с выраженным антагонизмом критериев. Так, конфигурация тросовой системы, обеспечивающая эффективное гашение колебаний посредством управления натяжением тросов, весьма сложна даже в теоретических расчетах и трудно реализуема на практике. С другой стороны, конфигурация тросовой системы, обеспечивающей наиболее рациональное использование рабочего пространства робота и наиболее легко реализуемой на практике не обеспечивает эффективное гашение колебаний рабочего инструмента тросового робота, в особенности крутильных колебаний. Также при гашении колебаний в подобной системе возникает ряд сложностей, связанных с тем, что система гашения колебаний должна быть размещена таким образом, чтобы не мешать движению тросов и мобильной платформы.
Из уровня техники известно несколько тросовых систем, в которых применены гасители колебаний.
Известен, тросовый робот с рабочей корзиной (см. DE102020130409, опубл. 19.05.2022) (1). Тросовый робот выполнен с платформой, которая подвешена как минимум к двум опорным конструкциям с помощью ряда гибких тяговых тросов, по крайней мере, одной лебедки, что приводит к изменению длины тяговых тросов и тем самым платформа в рабочей зоне является подвижной. Тросы расположены между соседними опорными конструкциями и образуют натянутую опорную раму, взаимно стабилизирующую опорные конструкции и что платформа выполнена в виде, рабочей корзины, на которой размещена не менее чем одна грузоподъемная лебедка. Рабочая корзина имеет систему демпфирования для компенсации вибраций. Пружинная демпфирующая система расположена на подвеске корзины для уменьшения колебаний, которые вводятся в общую систему. Демпфирование регулируется бесступенчато. Система демпфирования размещается на корзине на двух плоскостях внешней стороны корзины (оси X и Y), соответственно, сверху и снизу, через восемь интерфейсов на корзине.
Раскрытая в (1) система демпфирования достаточно сложна и малоэффективна для гашения крутильных колебаний.
Из уровня техники также известно, выбранное заявителем в качестве наиболее близкого аналога устройство аддитивного производства и технологический процесс для многослойной конструкции конструкций (см. DE102014015335, опубл. 21.04.2016) (2). В качестве альтернативы или дополнительно на дозирующей головке может быть расположено стабилизирующее устройство, предназначенное для стабилизации пространственного положения дозирующего сопла. Устройство стабилизации может иметь трехосный привод и/или гироскопическое устройство. Таким образом, раздаточная насадка установлена с возможностью смещения относительно «базового корпуса» раздаточной головки, так что ее можно перемещать независимо от тросовых приводов в определенных пределах. Кроме того, тросовый робот может иметь одно или несколько демпфирующих устройств. В частности, между концом по меньшей мере одного троса, обращенным к дозирующей головке, и дозирующей головкой может быть расположено демпфирующее устройство, которое также может иметь пружину и «входить в петлю» в соответствующий трос в качестве пружинно-демпфирующей системы. В качестве альтернативы или в дополнение к этому демпфирующее устройство также может быть встроено в привод соответствующего троса, например, в виде торсионной пружины/демпфера в кабельном барабане. Демпфирующие устройства могут также служить для предотвращения статической неопределенности подвески дозирующей головки при использовании четырех или более опорных конструкций или двойной подвески тросов на опорную конструкцию, в которой усилия отдельных тросов ограничены.
Демпфирующее устройство, известное из аналога (2) размещено непосредственно на тросах, поэтому также, как и система в аналоге (1) сложно в выполнении и не эффективно в отношении крутильных колебаний.
КРАТКОЕ ИЗЛОЖЕНИЕ ИЗОБРЕТЕНИЯ
Соответственно, существует необходимость устранить, по меньшей мере, часть упомянутых выше недостатков. В частности, существует потребность в оснащении тросовой системы с пассивным динамическим гасителем колебаний, эффективно гасящим крутильные колебания.
Данное изобретение направлено на решение технической проблемы, связанной с увеличением эффективности гашения крутильных колебаний.
Техническим результатом изобретения является повышение эффективности гашения крутильных колебаний.
Достижение заявленного технического результата возможно посредством оснащения тросовой системы пассивным динамическим гасителем колебаний. Система содержит опорную конструкцию, мобильную платформу, подвешенную на нескольких тросах на опорной конструкции, при этом предусмотрен управляющий блок, который соединен с исполнительными механизмами для перемещения тросов и предназначен для управления этими исполнительными механизмами для изменения положения и ориентации мобильной платформы, и гаситель колебаний.
Тросовая системы с пассивным динамическим гасителем колебаний характеризуется тем, что гаситель колебаний выполнен в виде подпружиненной подвижной массы, размещенной в нижней части мобильной платформы.
В частном варианте выполнения точка подвеса пружины размещена в центре нижней части платформы.
В частном варианте выполнения точка подвеса подпружиненной массы к пружине размещена в центре верхней части подвижной массы.
В частном варианте выполнения подвижная масса имеет осесимметричную форму.
В частном варианте выполнения подвижная масса преимущественно имеет цилиндрическую форму.
В частном варианте выполнения пружина размещена в канавке, выполненной в подвижной массе, и упирается краями в мобильную платформу и в подвижную массу гасителя.
В частном варианте выполнения мобильная платформа может быть выполнена в виде одного из следующих устройств: экструдер. платформа с манипулятором, платформа Стюарта, дельта-манипулятор, инструмент для покраски поверхности инструмента для очистки поверхности, инструмент для захвата паллет и т.д
Вышеупомянутые и другие цели, преимущества и особенности настоящего изобретения станут более очевидными из следующего не ограничивающего описания его примерного варианта осуществления, приведенного в качестве примера со ссылкой на прилагаемые чертежи.
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
Сущность изобретения поясняется чертежами, на которых;
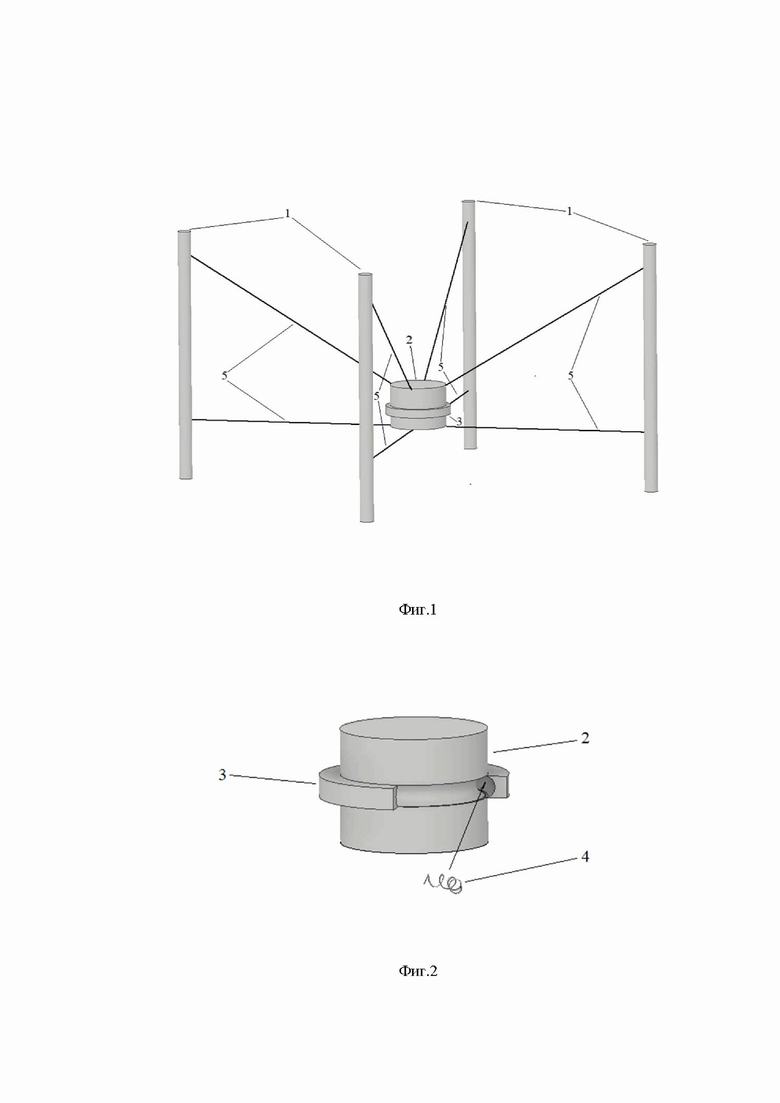
Фиг. 1 – схематическое изображение тросовой системы;
Фиг.2 – схематическое изображение мобильной платформы с гасителем колебаний.
Позиции на фиг.1,2 обозначают следующее:
1 - опора;
2 - мобильная платформа;
3 - подвижная масса;
4 - пружина;
5 - трос;
6 - вертикальная ось подвижной массы.
Эти чертежи не охватывают и, кроме того, не ограничивают весь объем вариантов реализации данного технического решения, а представляют собой только иллюстративный материал частного случая его реализации.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
В соответствии с примером осуществления изобретения, показанном на Фиг. 1,2 тросовая система представляет собой механическую систему, содержащую рабочий инструмент – мобильную платформу (2), которая подвешена на нескольких тросах (5), управление осуществляется посредством управляющего блока, который регулирует длины тросов (5), подаваемых с барабанов электроприводов. Тросовая система, изображенная на фиг.1 имеет четыре опоры (1), на каждой из которых размещены два троса (5), один из которых проходит с верхнего конца опоры к мобильной платформе (2), а второй - с нижнего конца опоры (1). Общее количество тросов может быть от трёх (может быть и два – тогда это плоский тросовый робот, или даже один – тогда это «классическая» тросовая система – подъёмный кран). Расположены тросы могут быть на различном количестве опор от трёх (то есть, хоть сотню тросов можно на трёх опорах разместить) до количества равного количеству тросов (то есть, сколько тросов, столько и опор). Это если под опорой мы понимаем вертикальные столбы. Если опора имеет протяжённость в горизонтали, то и одной такой опоры будет достаточно. Тросы могут также сходить с любого уровня на опоре, и высота точки схода даже может меняться в процессе работы. Для перемещения мобильной платформы в любое положение использую лебедки, управляемые управляющим блоком при помощи соответствующего программного обеспечения, положение изменяется посредством изменения длин тросов (5). Такое крепление тросов задает конфигурацию тросовой системы, гарантированно обеспечивающую отсутствие столкновений тросов как между собой, так и, например, с объектом печати в случае использования робота в качестве 3D-принтера.
Для обеспечения точности позиционирования и ориентации необходимо минимизировать колебания в системе, в частности необходимо уменьшить амплитуды крутильных колебаний. Для этого предусмотрена система гашения колебаний (фиг.2), состоящая из подвижной массы (3), которая крепится на наружной части мобильной платформы (2) при этом, подвижная масса способна вращаться вокруг мобильной платформы (2). На внутренней поверхности подвижной массы (3) выполнена канавка, в которой размещается упругий элемент, который может быть выполнен в виде двух пружин (4).
В качестве альтернативного варианта в канавке может быть размещен цилиндрический резервуар, заполненный сыпучим материалом, например тяжелыми шариками или дробью.
Гашение крутильных колебаний происходит за счет сжатия упругого элемента, который сообщает подвижной массе обратный импульс и тем самым гасит колебания.
Гашение колебаний основного объекта (мобильной платформы) происходит в соответствии с принципом отбора части энергии колебательного процесса основного объекта (мобильной платформы) на колебания гасителя и последующего рассеивания отобранной энергии. Пассивный динамический гаситель колебаний не требует дополнительных источников энергии, кроме энергии колебаний основного объекта, для активации подвижных элементов гасителя колебаний.
Пассивный динамический гаситель колебаний с массой в 10-15% от массы основного объекта способен обеспечивать уменьшение амплитуды крутильных колебаний рабочего инструмента тросового робота в 3-5 раз.
Система имеет наибольшую эффективность, когда подвижная масса имеет осесимметричную форму, а именно цилиндрическую форму.
Мобильная платформа тросового робота может быть выполнена в виде экструдера, предназначенного для подачи печатного материала, такого как специальные строительные смеси (с использованием модифицирующих добавок, отвердителей, пластификаторов и т.д.). При этом, при любом из перечисленных способов расположения пассивного динамического гасителя крутильных колебаний, гаситель не мешает работе исполнительных механизмов экструдера.
Указанный пример не ограничивает применение тросовой роботизированной системы.
ПРОМЫШЛЕННОЕ ПРИМЕНЕНИЕ
Предложенные устройства предназначены для ряда применений, включающих методы 3D-печати для аддитивного строительства зданий и сооружений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тросовая система с пассивным динамическим гасителем колебаний | 2022 |
|
RU2791827C1 |
| СИСТЕМА УЛАВЛИВАНИЯ КРУПНОГАБАРИТНЫХ МАССИВНЫХ ОБЪЕКТОВ НА ОСНОВЕ ТРОСОВОГО РОБОТА | 2022 |
|
RU2812163C1 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ ПИЛЬНОГО ДИСКА | 1991 |
|
RU2009886C1 |
| Мост | 1982 |
|
SU1060741A1 |
| СИСТЕМА УЛАВЛИВАНИЯ ПАДАЮЩИХ ОБЪЕКТОВ НА ОСНОВЕ ТРОСОВОГО РОБОТА | 2022 |
|
RU2810207C1 |
| Способ динамического гашения колебаний объекта защиты и устройство для его осуществления | 2017 |
|
RU2654890C1 |
| АДАПТИВНЫЙ ДИНАМИЧЕСКИЙ ГАСИТЕЛЬ КОЛЕБАНИЙ ВРАЩАЮЩИХСЯ ТЕЛ | 2005 |
|
RU2289739C1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| ЛЕНТОЧНО-ТРОСОВАЯ СИСТЕМА С ГИДРОЦИЛИНДРАМИ ОДНОСТОРОННЕГО ДЕЙСТВИЯ ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ СООРУЖЕНИЙ | 2022 |
|
RU2795751C1 |
| ШАССИ МОБИЛЬНОГО ТРАНСПОРТНОГО ОБОРУДОВАНИЯ | 2004 |
|
RU2291811C2 |
Изобретение относится к устройствам для гашения колебаний рабочего инструмента тросового робота, а именно к тросовой системе с пассивным динамическим гасителем колебаний. Техническим результатом изобретения является повышение эффективности гашения крутильных колебаний. Технический результат достигается тем, что тросовая система с пассивным динамическим гасителем колебаний содержит несущую конструкцию, мобильную платформу, подвешенную на нескольких тросах на несущую конструкцию, при этом предусмотрен управляющий блок, который соединен с исполнительными механизмами для перемещения тросов и предназначен для управления этими исполнительными механизмами для изменения положения и ориентации мобильной платформы, и пассивный гаситель колебаний, при этом пассивный гаситель выполнен в виде подвижной массы, размещенной снаружи мобильной платформы с возможностью вращения, при этом между мобильной платформой и подвижной массой размещен упругий элемент. 10 з.п. ф-лы, 2 ил.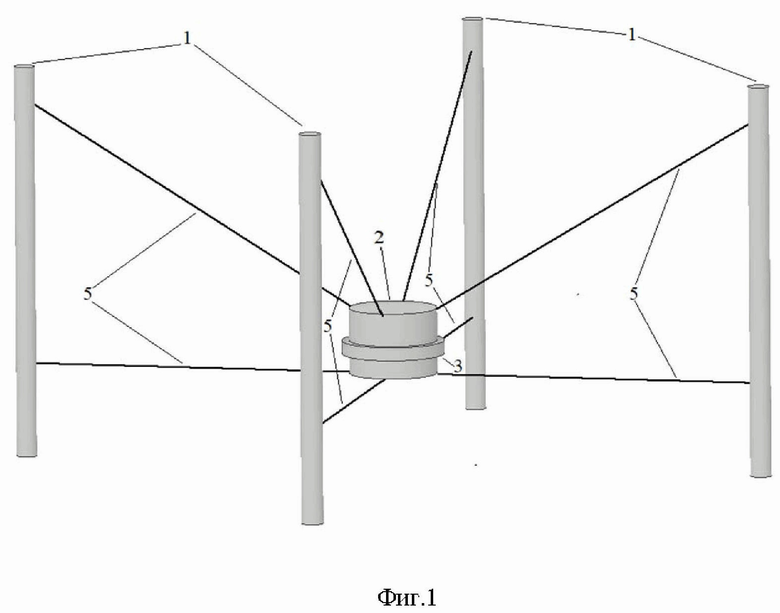
1. Тросовая система с пассивным динамическим гасителем колебаний, содержащая несущую конструкцию, мобильную платформу, подвешенную на нескольких тросах на несущую конструкции, при этом предусмотрен управляющий блок, который соединен с исполнительными механизмами для перемещения тросов и предназначен для управления этими исполнительными механизмами для изменения положения и ориентации мобильной платформы, и пассивный гаситель колебаний, отличающаяся тем, что пассивный гаситель выполнен в виде подвижной массы, размещенной снаружи мобильной платформы с возможностью вращения, при этом между мобильной платформой и подвижной массой размещен упругий элемент.
2. Тросовая система по п.1, отличающаяся тем, что внутри подвижной массы выполнена канавка.
3. Тросовая система по п.2, отличающаяся тем, что внутри канавки размещена по меньшей мере одна пружина.
4. Тросовая система по п.2, отличающаяся тем, что внутри канавки размещен цилиндрический резервуар, заполненный сыпучим материалом.
5. Тросовая система по п.4, отличающаяся тем, что цилиндрический резервуар заполнен шариками.
6. Тросовая система по п.4, отличающаяся тем, что цилиндрический резервуар заполнен дробью.
7. Тросовая система по п.1, отличающаяся тем, что подвижная масса размещена в центральной части мобильной платформы.
8. Тросовая система по п.1, отличающаяся тем, что подвижная масса имеет осесимметричную форму.
9. Тросовая система по п.8, отличающаяся тем, что подвижная масса преимущественно имеет цилиндрическую форму.
10. Тросовая система по п.9, отличающаяся тем, что подвижная масса выполнена в форме полого цилиндра.
11. Тросовая система по п.1, отличающаяся тем, что мобильная платформа выполнена в виде одного из следующих устройств: экструдер, платформа с манипулятором, платформа Стюарта, дельта-манипулятор, инструмент для покраски поверхности инструмента для очистки поверхности, инструмент для захвата паллет.
| DE 102014015335 A, 21.04.2016 | |||
| ГИДРОПОДКОРМЩИК к ДОЖДЕВАЛЬНЫМ МАШИНАМ | 0 |
|
SU385550A1 |
| US 2021276177 A1, 09.09.2021 | |||
| ДИНАМИЧЕСКАЯ ТРОСОВАЯ СИСТЕМА ПРЕИМУЩЕСТВЕННО ДЛЯ ЭЛЕКТРО- И РАДИОФИЗИЧЕСКИХ ИССЛЕДОВАНИЙ ОКОЛОЗЕМНОЙ СРЕДЫ | 1996 |
|
RU2104231C1 |
| Блок промышленного сооружения | 1985 |
|
SU1333756A1 |
