ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к устройствам на основе тросового робота и может быть использована для улавливания падающих объектов больших размеров и массы.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Из уровня техники известны тросовые системы, например, например многофункциональный тросовый робот (см. KR10-2014-0061680, опубл. 22.05.2014)(1). В публикации описан тросовый робот, способный выполнять различные работы на судне, такие как термообработка, нанесение покрытий, сварка и маркировка. Тросовый робот включает в себя: четыре стойки, способные регулировать свою высоту; лебедка с установленным энкодером для встраивания в каждую стойку; концевой эффектор, соединенный и закрепленный на переднем конце троса каждой лебедки; рабочий модуль, установленный в исполнительном органе и контроллер, управляющий движением рабочего органа посредством управления лебедкой. Тросовый робот позволяет выполнять различные работы, имея такие устройства, как нагревательная горелка (термообработка), пистолет для нанесения покрытий (покрытие), сварочная горелка (сварка) и лазерная указка (маркировка) в зависимости от цели работы.
Известен, тросовый робот (см. KR10-2019-0100903, опубл. 19.08.2019) (2). В публикции раскрыт к параллельная тросовая роботизированная система для очистки и управления солнечной панелью и, в частности, параллельная тросовая роботизированная система для очистки и управления солнечной панелью, которая позволяет рабочему легко получить доступ к солнечной панели с помощью параллельного кабельного робота, тем самым повышая удобство очистки и управления солнечной панелью без установки солнечной панели. Роботизированная система для очистки и управления солнечной панелью содержит: множество рам, установленных на краю комплекса установки солнечной панели; устройство регулировки длины троса, установленное в каждой раме и предназначенное для регулировки длины троса при разматывании или сматывании троса; подвесной вал, соединенный с тросом устройства регулировки длины троса и расположенный вертикально по отношению к земле; и рабочий орган, установленный на нижнем конце вала подвески.
Известен робот с тросовой лебедкой для контроля плавучести под водой (см. KR10-2014-0088854, опубл. 08.06.2016). Изобретение относится к подводному тросовому роботизированному устройству, способному управлять плавучестью. Во внутренней стене и плавучей конструкции установлено множество тросовых лебедок, а трос соединен с верхним и нижним углами подвижной плиты с помощью направляющих роликов разной высоты, установленных в боковой стенке. Подводное тросовое роботизированное устройство сформировано для перемещения объекта, подлежащего перемещению, посредством установки объекта, подлежащего перемещению, на верхнюю часть подвижной пластины. В подвижной плите установлено устройство контроля плавучести с использованием балластной цистерны и груза для контроля плавучести; а также установлена система технического зрения для наблюдения за подводной рабочей обстановкой и различные датчики для измерения положения, угла и высоты подвижной плиты. Движение и положение подвижной плиты тросовой лебедкой контролируются контроллером; и подвижную пластину можно перемещать в положение, за исключением рабочей области управления тросом, а положением подвижной пластины можно управлять, контролируя плавучесть.
Таким образом, из уровня техники известны тросовые системы различного назначения, однако наиболее близкого аналога, сходного по назначению с заявленным объектом в уровне техники не найдено.
КРАТКОЕ ИЗЛОЖЕНИЕ ИЗОБРЕТЕНИЯ
Данное изобретение направлено на решение технической проблемы, связанной с улавливанием падающих больших объектов с большой массой.
Техническим результатом изобретения является создание тросовой системы для улавливания падающих объектов больших размеров.
Достижение заявленного технического результата возможно посредством системы улавливания падающих объектов на основе тросового робота, содержащей по меньшей мере четыре опоры, в верхней части которых размещены ролики, по которым перемещаются тросы. В нижней части опорных башен размещены электромоторы для управления тросами, обеспечивающих посредством программного регулирования нелинейные вязкоупругие характеристики колебательной системы, а также перемещение уловленного объекта вдоль вертикальной оси в процессе затухания колебаний системы. Мобильная платформа робота подвижна главным образом вдоль вертикальной оси и перемещается с большой амплитудой и малой частотой колебаний при незначительных перемещениях в горизонтальной плоскости. Плотный тканый материал мобильной платформы обеспечивает более равномерное распределение нагрузки на тросовую систему робота. Профиль поверхности мобильной платформы в форме вогнутого эллиптического параболоида с малой кривизной обеспечивает оптимальное рассеивание энергии при улавливании падающего массивного объекта.
В предпочтительном варианте выполнения в качестве платформы робота применяется прочный плотный тканый материал.
В предпочтительном варианте поверхность мобильной платформы имеет профиль поверхности вогнутого эллиптического параболоида с малой кривизной.
В частном варианте выполнения площадь поверхности мобильной платформы занимает большую часть горизонтальной проекции рабочего пространства робота.
В частном варианте выполнения площадь мобильной платформы 7000 м2, а площадь горизонтальной проекции рабочего пространства робота более 10000 м2.
В одном из вариантов выполнения используется восьмитросовый робот.
Вышеупомянутые и другие цели, преимущества и особенности настоящего изобретения станут более очевидными из следующего не ограничивающего описания его примерного варианта осуществления, приведенного в качестве примера со ссылкой на прилагаемые чертежи.
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
Сущность изобретения поясняется чертежами, на которых;
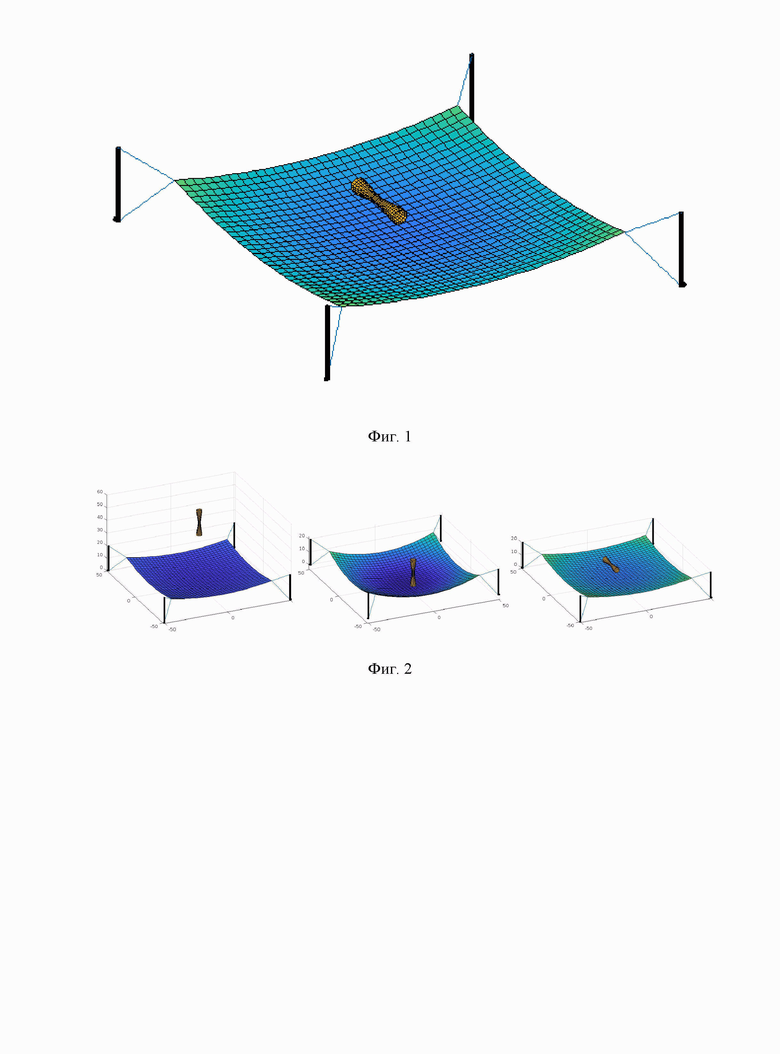
Фиг. 1 - схематическое изображение общего вида тросовой системы;
Фиг. 2 - схематическое изображение работы системы улавливания падающих объектов больших размеров и массы на основе тросового робота
Позиции на фиг. 1 обозначают следующее:
1 - опора (башня);
2 - трос;
3 - электромотор;
4 - сетка-улавливатель;
5 - улавливаемый объект.
Эти чертежи не охватывают и, кроме того, не ограничивают весь объем вариантов реализации данного технического решения, а представляют собой только иллюстративный материал частного случая его реализации.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
В соответствии с примером осуществления изобретения, показанном на Фиг. 1 система улавливания массивных объектов на основе тросового робота содержит несколько опор (башен) (1) между которыми на тросах (2) растянута сетка (4), которая служит для улавливания падающих объектов. Тросы (2) соединены с электромоторами (3), которые управляют движением тросов (2) и соответственно мобильной платформы (4), при этом платформа робота подвижна главным образом вдоль вертикальной оси и перемещается с большой амплитудой и малой частотой колебаний при незначительных перемещениях в горизонтальной плоскости.
Посредством программно-регулируемого закона движения тросов (2) достигаются нелинейные вязкоупругие характеристики колебательной системы. Это может быть очень важным при рассеивании энергии падающего объекта. После улавливания и захвата объект совершает затухающие колебания с большой амплитудой и малой частотой вдоль вертикальной оси рабочего пространства робота.
При большой площади поверхности мобильной платформы тросового робота становится возможным улавливать падающие объекты с линейными размерами в сотни метров и массой в тысячи килограмм. Такими объектами могут быть, например, использованные ступени космических ракет, а также иные объекты аэрокосмической отрасли.
Площадь поверхности мобильной платформы занимает большую часть горизонтальной проекции рабочего пространства робота. Например, площадь мобильной платформы 7000 м2, а площадь горизонтальной проекции рабочего пространства робота более 10000 м2.
Вязкоупругие свойства системы в значительной мере обеспечивается не упругостью элементов системы, а синхронной работой электромоторов, обеспечивающих искусственно создаваемое сопротивление движению пойманного объекта посредством контролируемой подачи тросов. Механические свойства конструкционных материалов не способны обеспечивать такой широкий диапазон вязкоупругих характеристик, который может быть достигнут посредством программного управления тросовой системой.
Указанный пример не ограничивает применение тросовой роботизированной системы.
ПРОМЫШЛЕННОЕ ПРИМЕНЕНИЕ
Предложенные устройства предназначены для ряда применений, включающих применение в аэрокосмической отрасли.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УЛАВЛИВАНИЯ ПАДАЮЩИХ ОБЪЕКТОВ НА ОСНОВЕ ТРОСОВОГО РОБОТА | 2022 |
|
RU2810207C1 |
| Тросовая система с пассивным динамическим гасителем колебаний | 2022 |
|
RU2791827C1 |
| Унифицированный роботизированный строительный комплекс для возведения зданий и сооружений в горной местности с использованием аддитивных технологий и способ возведения зданий и сооружений в горной местности посредством унифицированного роботизированного строительного комплекса | 2024 |
|
RU2836441C1 |
| Тросовая система с пассивным динамическим гасителем колебаний | 2022 |
|
RU2804055C1 |
| Трёхсредный мобильный аппарат "Этажерка" | 2019 |
|
RU2706748C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| ШАССИ МОБИЛЬНОГО ТРАНСПОРТНОГО ОБОРУДОВАНИЯ | 2004 |
|
RU2291811C2 |
| Устройство для очистки корпусов судов | 2019 |
|
RU2706267C1 |
| ПРИТАПЛИВАЕМЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ИЗМЕРИТЕЛЬНЫХ И ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2011 |
|
RU2468959C1 |
| Роботизированный комплекс для создания строительных элементов на космическом объекте | 2017 |
|
RU2670836C9 |
Изобретение относится к устройствам на основе тросового робота. Для улавливания падающих объектов система улавливания объектов на основе тросового робота содержит четыре опоры, в верхней части которых размещены ролики, по которым перемещаются тросы, в нижней части опор размещены электромоторы для управления тросами, обеспечивающие посредством программного регулирования нелинейные вязкоупругие характеристики колебательной системы, а также перемещение уловленного объекта вдоль вертикальной оси в процессе затухания колебаний системы, мобильная платформа робота закреплена на тросах и подвижна главным образом вдоль вертикальной оси. В качестве платформы робота применяется тканый материал. Поверхность мобильной платформы имеет профиль поверхности вогнутого эллиптического параболоида. 5 з.п. ф-лы, 2 ил.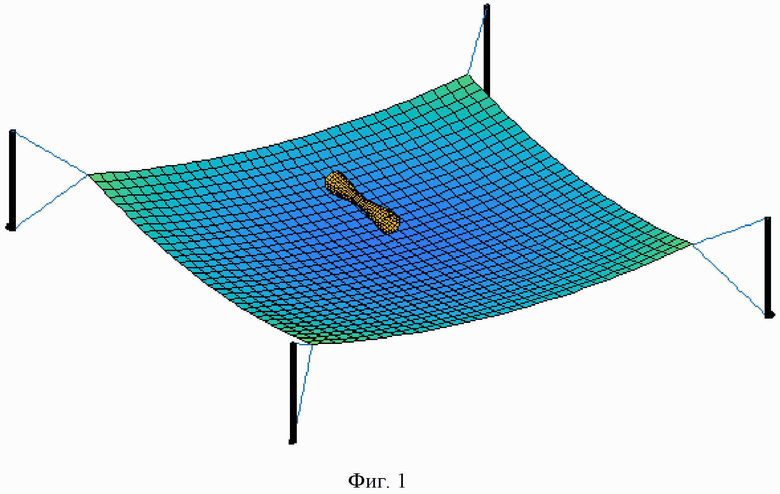
1. Система улавливания объектов на основе тросового робота, содержащая четыре опоры, в верхней части которых размещены ролики, по которым перемещаются тросы, в нижней части опор размещены электромоторы для управления тросами, обеспечивающие посредством программного регулирования нелинейные вязкоупругие характеристики колебательной системы, а также перемещение уловленного объекта вдоль вертикальной оси в процессе затухания колебаний системы, мобильная платформа робота закреплена на тросах и подвижна главным образом вдоль вертикальной оси.
2. Система по п.1, отличающаяся тем, что в качестве платформы робота применяется тканый материал.
3. Система по п.1, отличающаяся тем, что поверхность мобильной платформы имеет профиль поверхности вогнутого эллиптического параболоида.
4. Система по п.1, отличающаяся тем, что площадь поверхности мобильной платформы занимает большую часть горизонтальной проекции рабочего пространства робота.
5. Система по п.1, отличающаяся тем, что площадь мобильной платформы 7 000 м2, а площадь горизонтальной проекции рабочего пространства робота более 10 000 м2.
6. Система по п.1, отличающаяся тем, что используется восьмитросовый робот.
| СТАНЦИЯ ОБЕСПЕЧЕНИЯ МЯГКОЙ ПОСАДКИ КОСМИЧЕСКИХ КОРАБЛЕЙ (ВАРИАНТЫ) | 2021 |
|
RU2770609C1 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО САМОЛЕТА НА АЭРОФИНИШЕР | 2009 |
|
RU2399560C1 |
| Устройство для очистки корпусов судов | 2019 |
|
RU2706267C1 |
| KR 101630246 B1, 15.06.2016 | |||
| KR 1020150134647 A, 02.12.2015 | |||
| DE 102014015335 A1, 21.04.2016 | |||
| Tobias Bruckmann, Dieter Schramm, Lars Mikelsons, Manfred Hiller, and Thorsten Brandt | |||
| Wire Robots Part I: Kinematics, Analysis & Design | |||
| INTECH Open Access Publisher, 2008, | |||

