Изобретение относится к электрифицированному железнодорожному транспорту, а именно к устройствам для динамических испытаний токоприемников электроподвижного состава.
Наиболее близким к заявленному является устройство для испытаний токоприемников электроподвижного состава, содержащее основание, с установленным на нем токоприемником, полоз которого введен в контакт с отрезком контактного провода, закрепленным на блоке имитации жесткости контактной подвески, подключенном к системе управления и установленном на ферме, один конец которой закреплен на основании шарнирно, а другой конец посредством кривошипно-шатунного механизма связан с установленным на основании приводом, подключенным к системе управления (Пат. №122614 на полезную модель (РФ), МПК В60L 3/12. Устройство для испытаний токоприемников электроподвижного состава / О.А. Сидоров, И.Е. Чертков, А.В. Тарасенко, М.В. Емельянов (РФ). - №2012123321/11; Заявлено 05.06.2012; Опубл. 10.12.2012. Бюл. №34.).
Недостатком известного устройства для испытаний токоприемников электроподвижного состава является недостаточная достоверность имитации жесткости контактной подвески. Это связано с тем, что в известном устройстве в качестве упругих элементов, имитирующих жесткость реальной контактной подвески, используются резинокордные оболочки, чья жесткость имеет ярко выраженный нелинейный характер и не соответствует жесткости реальной контактной подвески. При этом значительная межслойная сила трения в оболочках резинокордных элементов не позволяет воссоздавать свободные колебания контактной подвески. Жесткость реальной контактной подвески во многом обуславливается натяжением контактного провода, тогда как в известном устройстве он закрепляется без натяжения. Вместе с тем контактный провод при малой длине и жестком закреплении обладает значительной изгибной жесткостью, что также оказывает негативное влияние на процесс имитации реальной контактной подвески. Кроме того, известное устройство не оснащено средствами для имитации приведенной массы контактной подвески, что снижает его функциональные возможности. Соответственно, указанные выше факторы не позволяют с достаточной достоверностью воссоздавать контактную подвеску на известном устройстве, что является ключевым требованием для исследований динамических характеристик токоприемников электроподвижного состава.
Целью изобретения является расширение функциональных возможностей за счет повышения достоверности имитации контактной подвески.
Указанная цель достигается тем, что в известном устройстве, содержащем основание, с установленным на нем токоприемником, полоз которого введен в контакт с отрезком контактного провода, закрепленным на блоке имитации жесткости контактной подвески, подключенном к системе управления и установленном на ферме, один конец которой закреплен на основании шарнирно, а другой конец посредством кривошипно-шатунного механизма связан с установленным на основании приводом, подключенным к системе управления, упомянутый блок имитации жесткости контактной подвески выполнен в виде двух отрезков цепи, между которыми закреплен отрезок контактного провода, при этом конец первого отрезка цепи соединен с фермой посредством пружины растяжения, а конец второго отрезка цепи соединен через датчик натяжения с установленным на ферме устройством натяжения, связанным с системой управления, при этом отрезок контактного провода оснащен датчиком нажатия и выполнен с возможностью установки на нем дополнительных грузов, а выходы упомянутых датчиков натяжения и нажатия соединены со входом системы управления.
На чертеже представлена схема предлагаемого устройства для испытаний токоприемников электроподвижного состава
Устройство для испытаний токоприемников электроподвижного состава содержит основание 1, с установленным на нем токоприемником 2, полоз 3 которого введен в контакт с отрезком контактного провода 4, закрепленного на блоке имитации жесткости контактной подвески 5, подключенном к системе управления 6 и установленном на ферме 7, один конец которой закреплен на основании 1 шарнирно, а другой конец посредством кривошипно-шатунного механизма 8 связан с установленным на основании приводом 9, подключенным к системе управления 6. Блок имитации жесткости контактной подвески 5 выполнен в виде двух отрезков цепи 10 и 11, между которыми закреплен отрезок контактного провода 4, при этом конец первого отрезка цепи 10 соединен с фермой 7 посредством пружины растяжения 12, а конец второго отрезка цепи 11 соединен через датчик натяжения 13 с установленным на ферме 7 устройством натяжения 14, связанного с системой управления 6, при этом отрезок контактного провода 4 оснащен датчиком нажатия 15 и выполнен с возможностью установки на нем дополнительных грузов 16, а выходы упомянутых датчиков натяжения 13 и нажатия 15 соединены со входом системы управления 6.
Предлагаемое устройство работает следующим образом.
Устройство представляет собой испытательную установку для динамических испытаний токоприемников электроподвижного состава.
Перед началом испытаний в систему управления 6 записывается соответствующая программа испытаний, которая содержит информацию о требуемой частоте вращения привода 9 и параметрах имитатора жесткости контактной подвески 5.
Включение привода 9, установленного на основании 1, приводит к возвратно-поступательному движению кривошипно-шатунного механизма 8, который соединен с концом фермы 7, другой конец которой шарнирно закреплен на основании 1. Движения фермы 7 в вертикальной плоскости приводят к вертикальным колебаниям имитатора жесткости контактной подвески 5 вместе с закрепленным на нем отрезком контактного провода 4, который введен в контакт с полозом 3 установленного на основании 1 токоприемника 2. Изменение частоты вращения привода 9 приводит к соответствующему изменению частоты вертикальных колебаний имитатора жесткости контактной подвески 5 вместе с соединенным с ним отрезком контактного провода 4. Система управления 6 в соответствии с программой испытаний осуществляет контроль и изменение частоты вращения привода 9.
Имитатор жесткости контактной подвески 5 осуществляет воссоздание жесткости реальной контактной подвески. Для этого отрезок контактного провода 4 закрепляется между двумя отрезками цепи 10 и 11. Использование цепи необходимо для минимизации влияния жесткости отрезка контактного провода 4, поскольку отрезки цепи 10 и 11 обладают нулевой изгибной жесткостью. Требуемое натяжение для обеспечения необходимой жесткости имитатора контактной подвески 5 создается посредством пружины 12 и устройства натяжения 14. Датчик натяжения 13 в режиме реального времени передает информацию об уровне натяжения отрезков цепи 10, 11 и контактного провода 4 системе управления 6, которая поддерживает требуемый уровень натяжения за счет передачи управляющих сигналов на устройство натяжения 14. Это позволяет обеспечить жесткость имитатора жесткости контактной подвески 5, прямо зависящей от натяжения цепей 10 и 11, что соответствует реальной картине зависимости жесткости контактной подвески от натяжения проводов.
Воздействие полоза 3 токоприемника 2 на отрезок контактного провода 4 приводит к растяжению пружины 12 и увеличению силы, воздействующей на механизм натяжения 14, что обуславливает возникновение силы, направленной на возвращение отрезка контактного провода 4 в начальное положение, что имитирует жесткость реальной контактной подвески.
Изменение приведенной массы имитатора контактной подвески 5 осуществляется путем изменения количества дополнительных грузов 16, устанавливаемых на отрезке контактного провода 4.
Регистрация состояния процесса взаимодействия полоза 3 токоприемника 4 с отрезком контактного провода 4, установленного на имитаторе 5, осуществляется за счет датчика нажатия 15, данные от которого передаются системе управления 6.
Использование предлагаемого изобретения позволит расширить функциональные возможности путем повышения достоверности имитации контактной подвески за счет использования имитатора контактной подвески, выполненного в виде отрезка контактного провода, на котором могут устанавливаться дополнительные грузы, имитирующие приведенную массу контактной подвески, и закрепленного посредством двух натянутых цепей для имитации жесткости контактной подвески. Предлагаемое устройство позволит более точно подбирать параметры токоприемника для минимизации разброса нажатия при его взаимодействии с контактной подвеской, особенно при высоких скоростях движения, что позволит оптимизировать процесс токосъема и снизить износ контактных элементов токоприемника и контактного провода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для испытаний токоприемников электроподвижного состава | 2023 |
|
RU2803997C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ТОКОПРИЕМНИКОВ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2011 |
|
RU2466041C1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ КОНТАКТНОЙ ПОДВЕСКИ ПРИ ИСПЫТАНИЯХ ТОКОПРИЕМНИКОВ | 2008 |
|
RU2389616C1 |
| Устройство для имитации контактной подвески при испытаниях токоприемников | 2024 |
|
RU2832142C1 |
| Устройство для динамических испытаний токоприемников электроподвижного состава | 1972 |
|
SU469625A1 |
| Токоприемник для электропоезда | 2022 |
|
RU2778163C1 |
| Установка для исследования токоприемников | 1978 |
|
SU861129A1 |
| Измерительный токоприемник электроподвижного состава | 2018 |
|
RU2681477C1 |
| УСТРОЙСТВО ПОДВЕСКИ ТОКОПРИЕМНИКА | 2000 |
|
RU2199449C2 |
| Устройство для динамических испытаний токоприемников электроподвижного состава | 1982 |
|
SU1062045A1 |

Изобретение относится к испытаниям токоприемников для транспортного средства. Устройство для испытаний токоприемников электроподвижного состава содержит основание с установленным на нем токоприемником, полоз которого введен в контакт с отрезком контактного провода, закрепленным на блоке имитации жесткости контактной подвески, подключенном к системе управления и установленном на ферме, один конец которой закреплен на основании шарнирно, а другой конец посредством кривошипно-шатунного механизма связан с установленным на основании приводом, подключенным к системе управления. При этом блок имитации жесткости контактной подвески выполнен в виде двух отрезков цепи, между которыми закреплен отрезок контактного провода, при этом конец первого отрезка цепи соединен с фермой посредством пружины растяжения, а конец второго отрезка цепи соединен через датчик натяжения с установленным на ферме устройством натяжения, связанным с системой управления. При этом отрезок контактного провода оснащен датчиком нажатия и выполнен с возможностью установки на нем дополнительных грузов. Выходы упомянутых датчиков натяжения и нажатия соединены со входом системы управления. Технический результат заключается в расширении функциональных возможностей устройства для испытаний токоприемников. 1 ил.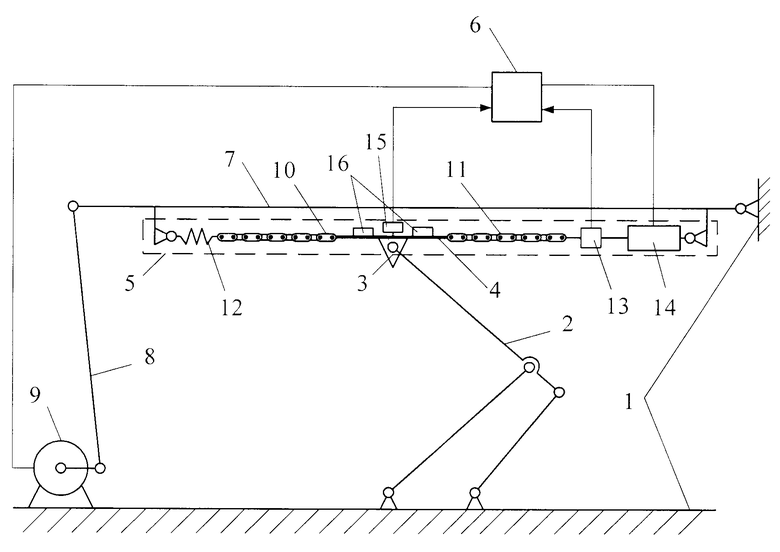
Устройство для испытаний токоприемников электроподвижного состава, содержащее основание с установленным на нем токоприемником, полоз которого введен в контакт с отрезком контактного провода, закрепленным на блоке имитации жесткости контактной подвески, подключенном к системе управления и установленном на ферме, один конец которой закреплен на основании шарнирно, а другой конец посредством кривошипно-шатунного механизма связан с установленным на основании приводом, подключенным к системе управления, отличающееся тем, что упомянутый блок имитации жесткости контактной подвески выполнен в виде двух отрезков цепи, между которыми закреплен отрезок контактного провода, при этом конец первого отрезка цепи соединен с фермой посредством пружины растяжения, а конец второго отрезка цепи соединен через датчик натяжения с установленным на ферме устройством натяжения, связанным с системой управления, при этом отрезок контактного провода оснащен датчиком нажатия и выполнен с возможностью установки на нем дополнительных грузов, а выходы упомянутых датчиков натяжения и нажатия соединены со входом системы управления.
| RU 122614 U1, 10.12.2012 | |||
| Устройство для засыпки в матрицы пресс-порошков при изготовлении прессованных керамических и тому подобных плиток с многоцветным рисунком | 1950 |
|
SU109053A1 |
| Устройство для динамических испытаний токоприемников электроподвижного состава | 1982 |
|
SU1062045A1 |
| JPS 5336801 A, 05.04.1978. | |||
