Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств контроля целостности навигационного поля глобальных навигационных спутниковых систем (ГНСС) в части, касающейся контроля достоверности информации, принимаемой навигационной аппаратурой потребителя (НАП) воздушного судна (ВС).
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ контроля достоверности информации, принимаемой НАП ВС (см., например, патент на изобретение №2777836 от 11.08.2022 г.), заключающийся в том, что на стороне наземной стационарной локальной контрольно-корректирующей станции (ЛККС), имеющей заранее точно определенные координаты  своей дислокации в заданной прямоугольной системе координат (ПСК) OXYZ, определяют моменты времени
своей дислокации в заданной прямоугольной системе координат (ПСК) OXYZ, определяют моменты времени  передачи дополнительных информационных посылок (ДИП), где
передачи дополнительных информационных посылок (ДИП), где  I - число ДИП, передаваемый на протяжении полета ВС, формируют и передают по радиоканалу в определенные моменты времени
I - число ДИП, передаваемый на протяжении полета ВС, формируют и передают по радиоканалу в определенные моменты времени  ДИП
ДИП  содержащие момент времени
содержащие момент времени  передачи данной ДИП и пространственные координаты ЛККС х0 в заданной ПСК OXYZ, на борту ВС взаимодействующего с ЛККС на протяжении полета ВС принимают и обрабатывают спутниковые сигналы (СС) от каждой j-й ГНСС с помощью НАП, где
передачи данной ДИП и пространственные координаты ЛККС х0 в заданной ПСК OXYZ, на борту ВС взаимодействующего с ЛККС на протяжении полета ВС принимают и обрабатывают спутниковые сигналы (СС) от каждой j-й ГНСС с помощью НАП, где  J - число действующих ГНСС, формируют для каждого j значения (оценки)
J - число действующих ГНСС, формируют для каждого j значения (оценки)  пространственных координат ВС в заданной ПСК OXYZ с использованием информации, содержащейся в СС j-й ГНСС, принимают ДИП
пространственных координат ВС в заданной ПСК OXYZ с использованием информации, содержащейся в СС j-й ГНСС, принимают ДИП  и фиксируют моменты времени
и фиксируют моменты времени  их приема, где
их приема, где  М - число принятых ДИП на протяжении
М - число принятых ДИП на протяжении  полета ВС, М ≤ I, с использованием момента времени
полета ВС, М ≤ I, с использованием момента времени  приема второй ДИП определяют очередной контрольный момент времени
приема второй ДИП определяют очередной контрольный момент времени  определяют из совокупности моментов времени
определяют из совокупности моментов времени  приема ДИП для момента
приема ДИП для момента  соответствующий ему момент времени
соответствующий ему момент времени  приема ДИП, определяют из совокупности принятых ДИП
приема ДИП, определяют из совокупности принятых ДИП  для момента
для момента  соответствующую ему ДИП
соответствующую ему ДИП  содержащую момент времени
содержащую момент времени  передачи данной ДИП и пространственные координаты ЛККС х0 в заданной ПСК OXYZ, с использованием значений
передачи данной ДИП и пространственные координаты ЛККС х0 в заданной ПСК OXYZ, с использованием значений  и х0 определяют базовую оценку
и х0 определяют базовую оценку  расстояния между ВС и ЛККС на контрольный момент времени
расстояния между ВС и ЛККС на контрольный момент времени  для каждого j, где
для каждого j, где  - значения пространственных координат ВС в заданной ПСК OXYZ на контрольный момент времени
- значения пространственных координат ВС в заданной ПСК OXYZ на контрольный момент времени  сформированные с использованием информации, содержащейся в СС j-й ГНСС, проверяют наличие принятой ДИП в допустимом временном интервале
сформированные с использованием информации, содержащейся в СС j-й ГНСС, проверяют наличие принятой ДИП в допустимом временном интервале  на момент
на момент  если в допустимом временном интервале
если в допустимом временном интервале  на момент
на момент  имеется принятая ДИП, то с использованием значений
имеется принятая ДИП, то с использованием значений  определяют контрольную оценку
определяют контрольную оценку  расстояния между ВС и ЛККС на момент
расстояния между ВС и ЛККС на момент  сравнивают для каждого j модуль разности базовой
сравнивают для каждого j модуль разности базовой  и контрольной
и контрольной  оценок расстояний между ВС и ЛККС с заданным пороговым значением h, если j-й модуль разности базовой
оценок расстояний между ВС и ЛККС с заданным пороговым значением h, если j-й модуль разности базовой  и контрольной
и контрольной  оценок расстояний между ВС и ЛККС превышает заданное пороговое значение h, то формируют решение
оценок расстояний между ВС и ЛККС превышает заданное пороговое значение h, то формируют решение  о недостоверности информации принимаемой НАП от спутников j-й ГНСС на момент
о недостоверности информации принимаемой НАП от спутников j-й ГНСС на момент  (формируют решение о том, что достоверность информации, принимаемой НАП ВС от спутников j-й ГНСС, не соответствует заданным требованиям на момент
(формируют решение о том, что достоверность информации, принимаемой НАП ВС от спутников j-й ГНСС, не соответствует заданным требованиям на момент  ), в противном случае формируют решение
), в противном случае формируют решение  о достоверности информации принимаемой НАП от спутников j-й ГНСС на момент
о достоверности информации принимаемой НАП от спутников j-й ГНСС на момент  (формируют решение о том, что достоверность информации, принимаемой НАП ВС от спутников j-й ГНСС, соответствует заданным требованиям на момент
(формируют решение о том, что достоверность информации, принимаемой НАП ВС от спутников j-й ГНСС, соответствует заданным требованиям на момент  ), если принятая ДИП в допустимом временном интервале
), если принятая ДИП в допустимом временном интервале  на момент
на момент  отсутствует, то с использованием контрольной оценки
отсутствует, то с использованием контрольной оценки  расстояния между ВС и ЛККС на момент
расстояния между ВС и ЛККС на момент  и контрольной оценки
и контрольной оценки  расстояния между ВС и ЛККС на момент
расстояния между ВС и ЛККС на момент  определяют прогнозируемую оценку
определяют прогнозируемую оценку  расстояния между ВС и ЛККС на момент
расстояния между ВС и ЛККС на момент  сравнивают для каждого j модуль разности базовой
сравнивают для каждого j модуль разности базовой  и прогнозируемой
и прогнозируемой  оценок расстояний между ВС и ЛККС с заданным пороговым значением h, если j-й модуль разности базовой
оценок расстояний между ВС и ЛККС с заданным пороговым значением h, если j-й модуль разности базовой  и прогнозируемой
и прогнозируемой  оценок расстояний превышает заданное пороговое значение h, то формируют решение
оценок расстояний превышает заданное пороговое значение h, то формируют решение  о недостоверности информации принимаемой НАП от спутников j-й ГНСС на момент
о недостоверности информации принимаемой НАП от спутников j-й ГНСС на момент  в противном случае формируют решение
в противном случае формируют решение  о достоверности информации принимаемой НАП от спутников j-й ГНСС на момент
о достоверности информации принимаемой НАП от спутников j-й ГНСС на момент 
К основным недостаткам прототипа относится снижение вероятности правильного контроля достоверности информации, принимаемой НАП, при увеличении продолжительности отсутствия принятых ДИП. Это объясняется тем, что увеличение продолжительности отсутствия принятых ДИП приводит к увеличению средней ошибки прогнозируемой оценки  расстояния между ВС и ЛККС, и как следствие, к снижению вероятности правильного контроля достоверности информации, принимаемой НАП.
расстояния между ВС и ЛККС, и как следствие, к снижению вероятности правильного контроля достоверности информации, принимаемой НАП.
Техническим результатом изобретения является повышение вероятности правильного контроля достоверности информации, принимаемой НАП.
Указанный результат достигается тем, что, если в прототипе в допустимом временном интервале  на момент
на момент  отсутствует принятая ДИП (если определено значение
отсутствует принятая ДИП (если определено значение  индикатора наличия ДИП), то с использованием значения J определяют минимальное число K первичных пар (ПП) ГНСС, с использованием значений k и J определяют номера k1(k) и k2(k) первых и вторых ГНСС соответственно для каждой k-й ПП, где
индикатора наличия ДИП), то с использованием значения J определяют минимальное число K первичных пар (ПП) ГНСС, с использованием значений k и J определяют номера k1(k) и k2(k) первых и вторых ГНСС соответственно для каждой k-й ПП, где  определяют значения
определяют значения  абсолютных невязок между значениями
абсолютных невязок между значениями  пространственных координат ВС, сформированными НАП с использованием информации содержащейся в СС k-й первичной пары ГНСС на момент
пространственных координат ВС, сформированными НАП с использованием информации содержащейся в СС k-й первичной пары ГНСС на момент  с использованием значений
с использованием значений  определяют для каждого к значение
определяют для каждого к значение  индикатора достоверности информации, принимаемой НАП от спутников k-й ПП ГНСС на момент
индикатора достоверности информации, принимаемой НАП от спутников k-й ПП ГНСС на момент  при этом если значения
при этом если значения  не превышают значение
не превышают значение  то формируют решение
то формируют решение  в противном случае формируют решение
в противном случае формируют решение  где
где  - заданная допустимая невязка,
- заданная допустимая невязка, 
 - информация, принимаемая НАП от спутников k-й ПП ГНСС является достоверной на момент
- информация, принимаемая НАП от спутников k-й ПП ГНСС является достоверной на момент 
 - информация, принимаемая НАП от спутников k-й ПП ГНСС является недостоверной на момент
- информация, принимаемая НАП от спутников k-й ПП ГНСС является недостоверной на момент  с использованием значений
с использованием значений  определяют значение
определяют значение  индикатора наличия первично-достоверных пар (ПДП) ГНСС на момент
индикатора наличия первично-достоверных пар (ПДП) ГНСС на момент  где
где 
 - ПДП ГНСС на момент
- ПДП ГНСС на момент  отсутствуют;
отсутствуют;  - ПДП ГНСС на момент
- ПДП ГНСС на момент  имеются, если определено значение
имеются, если определено значение  то с использованием значений
то с использованием значений  и K определяют значение
и K определяют значение  индикатора полной достоверности ПП ГНСС на момент
индикатора полной достоверности ПП ГНСС на момент  где
где 
 - не все ПП ГНСС являются ПДП на момент
- не все ПП ГНСС являются ПДП на момент 
 - все ПП ГНСС являются ПДП на момент
- все ПП ГНСС являются ПДП на момент  если определено значение
если определено значение  то формируют для каждого j решение
то формируют для каждого j решение  если определено значение
если определено значение  то с использованием значений
то с использованием значений  определяют номер
определяют номер  контрольной ГНСС, с использованием значений
контрольной ГНСС, с использованием значений  определяют значение индикатора
определяют значение индикатора  отношения j-й ГНСС к ПДП на момент
отношения j-й ГНСС к ПДП на момент  где
где 
 - j-я ГНСС относится к ПДП ГНСС на момент
- j-я ГНСС относится к ПДП ГНСС на момент 
 - j-я ГНСС не относится к ПДП ГНСС на момент
- j-я ГНСС не относится к ПДП ГНСС на момент  если в отношении j-й ГНСС определено значение
если в отношении j-й ГНСС определено значение  то формируют решение
то формируют решение  если в отношении j-й ГНСС определено значение
если в отношении j-й ГНСС определено значение  то определяют значения
то определяют значения  абсолютных невязок между значениями
абсолютных невязок между значениями  пространственных координат ВС, сформированными НАП с использованием информации содержащейся в СС j-й вторичной пары ГНСС на момент
пространственных координат ВС, сформированными НАП с использованием информации содержащейся в СС j-й вторичной пары ГНСС на момент  где
где  - значения пространственных координат ВС, сформированные с использованием информации, содержащейся в СС j-й ГНСС на момент
- значения пространственных координат ВС, сформированные с использованием информации, содержащейся в СС j-й ГНСС на момент 
 - значения пространственных координат ВС, сформированные с использованием информации, содержащейся в СС контрольной ГНСС на момент
- значения пространственных координат ВС, сформированные с использованием информации, содержащейся в СС контрольной ГНСС на момент  с использованием значений
с использованием значений  формируют для каждого j вторичных пар ГНСС решение
формируют для каждого j вторичных пар ГНСС решение  при этом если значения
при этом если значения  не превышают значение
не превышают значение  то формируют решение
то формируют решение  в противном случае формируют решение
в противном случае формируют решение  осуществляют контроль достоверности принимаемой НАП информации с использованием прогнозируемой оценки
осуществляют контроль достоверности принимаемой НАП информации с использованием прогнозируемой оценки  расстояния между ВС и ЛККС на момент
расстояния между ВС и ЛККС на момент  только в случае одновременного отсутствия принятой ДИП в интервале
только в случае одновременного отсутствия принятой ДИП в интервале  и ПДП ГНСС на момент
и ПДП ГНСС на момент  (если определены значения
(если определены значения  и
и  ), при этом с использованием контрольных оценок
), при этом с использованием контрольных оценок  на моменты
на моменты  соответственно определяют прогнозируемую оценку
соответственно определяют прогнозируемую оценку  если j-й модуль разности базовой
если j-й модуль разности базовой  и прогнозируемой
и прогнозируемой  оценок превышает значение h, то формируют решение
оценок превышает значение h, то формируют решение  в противном случае формируют решение
в противном случае формируют решение 
Сущность изобретения заключается в том, что, в случае отсутствия принятой ДИП в допустимом временном интервале на контрольный момент времени, осуществляется определение ПДП ГНСС путем сопоставления значений пространственных координат ВС, формируемых с использованием поступающих от данных ГНСС спутниковых сигналов. В случае наличия ПДП, информация, принимаемая НАП от спутников ГНСС, относящихся к ПДП признается достоверной, а в отношении ГНСС не относящихся к ПДП производится дополнительный контроль достоверности принимаемой от их спутников информации путем сопоставления значений пространственных координат ВС, формируемых с использованием СС, принимаемых от данных ГНСС, и контрольной ГНСС, относящейся к ПДП. Контроль достоверности принимаемой НАП информации с использованием прогнозируемой оценки расстояния между ВС и ЛККС осуществляется только в случае одновременного отсутствия принятой ДИП в допустимом временном интервале и ПДП ГНСС на контрольный момент времени. Это позволяет, в случае отсутствия принятой ДИП и наличия ПДП ГНСС, исключить ошибки контроля достоверности принимаемой НАП информации, вызванные увеличением продолжительности отсутствия принятых ДИП и, как следствие, приводит к повышению вероятности правильного контроля достоверности принимаемой НАП информации в целом.
Данный способ включает в себя следующие этапы:
1 На стороне наземной стационарной ЛККС, имеющей заранее точно определенные координаты  своей дислокации в заданной ПСК OXYZ:
своей дислокации в заданной ПСК OXYZ:
1.1 Определение моментов времени  передачи ДИП в соответствии с выражением
передачи ДИП в соответствии с выражением

Где  - заданный первый момент времени передачи дополнительной информационной посылки,
- заданный первый момент времени передачи дополнительной информационной посылки, 
 - установленный интервал времени между моментами времени передачи ДИП,
- установленный интервал времени между моментами времени передачи ДИП,  - продолжительность полета ВС.
- продолжительность полета ВС.
1.2 Формирование и передача по радиоканалу в определенные моменты времени  ДИП
ДИП  содержащих момент времени
содержащих момент времени  передачи данной посылки и пространственные координаты ЛККС х0 в заданной ПСК OXYZ.
передачи данной посылки и пространственные координаты ЛККС х0 в заданной ПСК OXYZ.
2 На борту ВС взаимодействующего с ЛККС на протяжении его полета:
2.1 Прием и обработка спутниковых сигналов от каждой j-й ГНСС с помощью НАП.
2.2 Формирование для каждого  значений
значений  пространственных координат ВС в заданной ПСК OXYZ с использованием информации, содержащейся в СС j-й ГНСС.
пространственных координат ВС в заданной ПСК OXYZ с использованием информации, содержащейся в СС j-й ГНСС.
2.3 Прием ДИП  и фиксация моментов времени
и фиксация моментов времени  их приема, где
их приема, где  М≤I.
М≤I.
Примечание: индекс  определяет номер очередной принятой ДИП с учетом условия М≤I указывающего на то, что не все переданные ДИП могут быть приняты на борту ВС. В идеальном случае, когда все переданные ДИП принимаются на борту ВС справедливы равенства: m=i, М=I.
определяет номер очередной принятой ДИП с учетом условия М≤I указывающего на то, что не все переданные ДИП могут быть приняты на борту ВС. В идеальном случае, когда все переданные ДИП принимаются на борту ВС справедливы равенства: m=i, М=I.
2.4 Определение очередного контрольного момента времени  в соответствии с выражением
в соответствии с выражением

Где  - момент времени приема второй ДИП,
- момент времени приема второй ДИП, 
 - заданный интервал времени между контрольными моментами времени
- заданный интервал времени между контрольными моментами времени 
Примечание: в соответствии с выражением (2) в качестве первого контрольного момента времени  принимается момент времени
принимается момент времени  приема второй ДИП. Это объясняется необходимостью наличия как минимум двух принятых ДИП для выполнения контроля достоверности информации, принимаемой НАП ВС от спутников j-й ГНСС, при временном отсутствии очередных принятых ДИП. Более подробно необходимость наличия как минимум двух принятых ДИП к любому контрольному моменту времени будет объяснено в пункте 2.26.
приема второй ДИП. Это объясняется необходимостью наличия как минимум двух принятых ДИП для выполнения контроля достоверности информации, принимаемой НАП ВС от спутников j-й ГНСС, при временном отсутствии очередных принятых ДИП. Более подробно необходимость наличия как минимум двух принятых ДИП к любому контрольному моменту времени будет объяснено в пункте 2.26.
2.5 Определение для очередного контрольного момента времени  соответствующего ему момента времени
соответствующего ему момента времени  приема ДИП из совокупности
приема ДИП из совокупности  в соответствии с выражением
в соответствии с выражением

Примечание: в соответствии с выражением (3) в качестве момента времени  приема ДИП, соответствующего контрольному моменту времени
приема ДИП, соответствующего контрольному моменту времени  выбирается ближайший к
выбирается ближайший к  момент времени
момент времени  из совокупности
из совокупности 
2.6 Определение для очередного контрольного момента времени  соответствующей ему ДИП
соответствующей ему ДИП  из совокупности принятых ДИП
из совокупности принятых ДИП  в соответствии с выражением
в соответствии с выражением

Примечание: в соответствии с выражением (4) в качестве ДИП  соответствующей контрольному моменту времени
соответствующей контрольному моменту времени  выбирается ДИП Vm из совокупности принятых ДИП {Vm} для которой справедливо равенство
выбирается ДИП Vm из совокупности принятых ДИП {Vm} для которой справедливо равенство 
2.7 Определение базовой оценки  расстояния между ВС и ЛККС на контрольный момент времени
расстояния между ВС и ЛККС на контрольный момент времени  для каждого j в соответствии с выражением
для каждого j в соответствии с выражением

Где  - значения пространственных координат ВС в заданной ПСК OXYZ на контрольный момент времени
- значения пространственных координат ВС в заданной ПСК OXYZ на контрольный момент времени  сформированные с использованием информации, содержащейся в СС j-й ГНСС.
сформированные с использованием информации, содержащейся в СС j-й ГНСС.
2.8 Определение значения  индикатора наличия ДИП (проверка наличия принятой ДИП в допустимом временном интервале
индикатора наличия ДИП (проверка наличия принятой ДИП в допустимом временном интервале  на контрольный момент времени
на контрольный момент времени  ) в соответствии с выражением
) в соответствии с выражением

Где  - в допустимом временном интервале
- в допустимом временном интервале  на контрольный момент времени
на контрольный момент времени  имеется принятая ДИП,
имеется принятая ДИП,  - в допустимом временном интервале
- в допустимом временном интервале  на контрольный момент времени
на контрольный момент времени  отсутствует принятая ДИП.
отсутствует принятая ДИП.
2.9 Если на этапе 2.8 определено значение  то переход к этапу 2.12, иначе (если на этапе 2.8 определено значение
то переход к этапу 2.12, иначе (если на этапе 2.8 определено значение  ) выполнение этапов 2.10-2.11.
) выполнение этапов 2.10-2.11.
2.10 Определение контрольной оценки расстояния между ВС и ЛККС на контрольный момент времени  в соответствии с выражением
в соответствии с выражением

Где  - момент времени передачи
- момент времени передачи  ДИП
ДИП 
2.11 Формирование решения  о достоверности или недостоверности информации, принимаемой НАП ВС от спутников j-й ГНСС на контрольный момент времени
о достоверности или недостоверности информации, принимаемой НАП ВС от спутников j-й ГНСС на контрольный момент времени  в соответствии с выражением
в соответствии с выражением

Где  - решение о недостоверности информации, принимаемой НАП ВС от спутников j-й ГНСС на контрольный момент времени
- решение о недостоверности информации, принимаемой НАП ВС от спутников j-й ГНСС на контрольный момент времени  (достоверность информации, принимаемой НАП ВС от спутников j-й ГНСС, не соответствует заданным требованиям на контрольный момент времени
(достоверность информации, принимаемой НАП ВС от спутников j-й ГНСС, не соответствует заданным требованиям на контрольный момент времени  );
);  -решение о достоверности информации, принимаемой НАП ВС от спутников j-й ГНСС на контрольный момент времени
-решение о достоверности информации, принимаемой НАП ВС от спутников j-й ГНСС на контрольный момент времени  (достоверность информации, принимаемой НАП ВС от спутников j-й ГНСС, соответствует заданным требованиям на контрольный момент времени
(достоверность информации, принимаемой НАП ВС от спутников j-й ГНСС, соответствует заданным требованиям на контрольный момент времени  ), h - заданное пороговое значение.
), h - заданное пороговое значение.
Примечание: в соответствии с выражением (8) решение  о недостоверности информации, принимаемой НАП ВС от спутников j-й ГНСС на контрольный момент времени
о недостоверности информации, принимаемой НАП ВС от спутников j-й ГНСС на контрольный момент времени  формируется в том случае, если j-й модуль разности базовой
формируется в том случае, если j-й модуль разности базовой  и контрольной
и контрольной  оценок расстояний превышает заданное пороговое значение h, в противном случае формируется решение
оценок расстояний превышает заданное пороговое значение h, в противном случае формируется решение  о достоверности информации, принимаемой НАП ВС от спутников j-й ГНСС на контрольный момент времени
о достоверности информации, принимаемой НАП ВС от спутников j-й ГНСС на контрольный момент времени 
Этап 2.12 и последующие этапы выполняются только в случае, если на этапе 2.8 определено значение 
2.12 Определение минимального числа К ПП ГНСС в соответствии с выражением
Примечание: под ПП ГНСС понимается какая-либо пара ГНСС из всей совокупности действующих ГНСС. Минимальное число K ПП ГНСС является минимальным из любого возможного сочетания пар действующих ГНСС, при условии, что каждая из действующих ГНСС относится хотя бы к одной из пар ГНСС.
2.13 Определение номеров  первых ГНСС для каждой k-й ПП в соответствии с выражением
первых ГНСС для каждой k-й ПП в соответствии с выражением

где  - номер первой ГНСС в k-й ПП,
- номер первой ГНСС в k-й ПП, 
2.14 Определение номеров  вторых ГНСС для каждой k-й ПП в соответствии с выражением
вторых ГНСС для каждой k-й ПП в соответствии с выражением

где  - номер второй ГНСС в k-й ПП,
- номер второй ГНСС в k-й ПП, 
Примечание: в соответствии с этапами 2.13 и 2.14 распределение ГНСС по первичным парам осуществляется таким образом, что к первой ПП относятся ГНСС с номерами j=1 и j=2, ко второй ПП, при условии J≥4, относятся ГНСС с номерами j=3 и j=4, …, к последней ПП относятся ГНСС с номерами j=K-1 и j=K. В случае, если число J действующих ГНСС нечетное, то ГНСС с номером j=J-1 относится к двум ПП: к ПП под номером K и к ПП под номером K-1.
2.15 Определение значений  абсолютных невязок между значениями пространственных координат ВС, сформированными НАП с использованием информации содержащейся в спутниковых сигналах k-й ПП ГНСС на контрольный момент времени
абсолютных невязок между значениями пространственных координат ВС, сформированными НАП с использованием информации содержащейся в спутниковых сигналах k-й ПП ГНСС на контрольный момент времени  в соответствии с выражением
в соответствии с выражением
где  - значения пространственных координат ВС в заданной ПСК OXYZ, сформированные с использованием информации, содержащейся в СС первой ГНСС в k-й ПП на контрольный момент времени
- значения пространственных координат ВС в заданной ПСК OXYZ, сформированные с использованием информации, содержащейся в СС первой ГНСС в k-й ПП на контрольный момент времени 
 - значения пространственных координат ВС в заданной ПСК OXYZ, сформированные с использованием информации, содержащейся в СС второй ГНСС в k-й ПП на контрольный момент времени
- значения пространственных координат ВС в заданной ПСК OXYZ, сформированные с использованием информации, содержащейся в СС второй ГНСС в k-й ПП на контрольный момент времени 
2.16 Определение для каждого к значения  индикатора достоверности информации, принимаемой НАП от спутников k-й ПП ГНСС на контрольный момент времени
индикатора достоверности информации, принимаемой НАП от спутников k-й ПП ГНСС на контрольный момент времени  в соответствии с выражением
в соответствии с выражением

где 
 - информация, принимаемая НАП от спутников k-й ПП ГНСС является достоверной на контрольный момент времени
- информация, принимаемая НАП от спутников k-й ПП ГНСС является достоверной на контрольный момент времени 
 - информация, принимаемая НАП от спутников k-й ПП ГНСС является недостоверной на контрольный момент времени
- информация, принимаемая НАП от спутников k-й ПП ГНСС является недостоверной на контрольный момент времени 
здесь  - заданная допустимая невязка значений координат ВС, сформированных НАП с использованием информации принимаемой от спутников пары ГНСС.
- заданная допустимая невязка значений координат ВС, сформированных НАП с использованием информации принимаемой от спутников пары ГНСС.
2.17 Определение значения  индикатора наличия ПДП ГНСС на контрольный момент времени
индикатора наличия ПДП ГНСС на контрольный момент времени  в соответствии с выражением
в соответствии с выражением
где  - ПДП ГНСС на контрольный момент времени
- ПДП ГНСС на контрольный момент времени  отсутствуют;
отсутствуют;
 - ПДП ГНСС на контрольный момент времени
- ПДП ГНСС на контрольный момент времени  имеются.
имеются.
Примечание: под ПДП ГНСС на контрольный момент времени  понимается k-я ПП ГНСС в отношении которой определено значение
понимается k-я ПП ГНСС в отношении которой определено значение 
2.18 Если на этапе 2.17 определено значение  то переход к этапу 2.26, иначе (если на этапе 2.17 определено значение
то переход к этапу 2.26, иначе (если на этапе 2.17 определено значение  ), то переход к этапу 2.19.
), то переход к этапу 2.19.
2.19 Определение значения  индикатора полной достоверности ПП ГНСС на контрольный момент времени
индикатора полной достоверности ПП ГНСС на контрольный момент времени  в соответствии с выражением
в соответствии с выражением
где  - не все ПП ГНСС являются ПДП на контрольный момент времени
- не все ПП ГНСС являются ПДП на контрольный момент времени 
 - все ПП ГНСС являются ПДП на контрольный момент времени
- все ПП ГНСС являются ПДП на контрольный момент времени 
2.20 Если на этапе 2.19 определено значение  то переход к этапу 2.21, иначе (если на этапе 2.19 определено значение
то переход к этапу 2.21, иначе (если на этапе 2.19 определено значение  ) формирование для каждого
) формирование для каждого  (для всех действующих ГНСС) решения
(для всех действующих ГНСС) решения  о достоверности информации, принимаемой НАП ВС от спутников j-й ГНСС на контрольный момент времени
о достоверности информации, принимаемой НАП ВС от спутников j-й ГНСС на контрольный момент времени  в соответствии с выражением
в соответствии с выражением

Этапы 2.21-2.25 выполняются только в случае, если на этапе 2.20 определено значение 
2.21 Определение номера  контрольной ГНСС в соответствии с выражением
контрольной ГНСС в соответствии с выражением

Примечание: под контрольной ГНСС понимается одна из ГНСС, относящихся к ПДП, и используемая в дальнейшем для контроля достоверности информации, принимаемой НАП от спутников ГНСС, не относящихся к ПДП. В соответствии с выражением (18), в качестве контрольной ГНСС на контрольный момент времени  выбирается ГНСС с наименьшим порядковым номером из числа ГНСС, относящихся к ПДП.
выбирается ГНСС с наименьшим порядковым номером из числа ГНСС, относящихся к ПДП.
2.22 Определение значения  индикатора отношения j-й ГНСС к ПДП на контрольный момент времени
индикатора отношения j-й ГНСС к ПДП на контрольный момент времени  в соответствии с выражением
в соответствии с выражением

где  - j-я ГНСС относится к ПДП ГНСС на контрольный момент времени
- j-я ГНСС относится к ПДП ГНСС на контрольный момент времени 
 - j-я ГНСС не относится к ПДП ГНСС на контрольный момент времени
- j-я ГНСС не относится к ПДП ГНСС на контрольный момент времени 
2.23 Если на этапе 2.22 в отношении j-й ГНСС определено значение  то переход к этапу 2.24, иначе (если на этапе 2.22 в отношении j-й ГНСС определено значение
то переход к этапу 2.24, иначе (если на этапе 2.22 в отношении j-й ГНСС определено значение  ) формирование решения
) формирование решения  о достоверности информации, принимаемой НАП ВС от спутников j-й ГНСС на контрольный момент времени
о достоверности информации, принимаемой НАП ВС от спутников j-й ГНСС на контрольный момент времени 
Этапы 2.24 - 2.25 выполняются только для таких у, для которых на этапе 2.23 определено значение 
2.24 Определение значений  абсолютных невязок между значениями пространственных координат ВС, сформированными НАП с использованием информации содержащейся в СС j-й вторичной пары ГНСС на контрольный момент времени
абсолютных невязок между значениями пространственных координат ВС, сформированными НАП с использованием информации содержащейся в СС j-й вторичной пары ГНСС на контрольный момент времени  в соответствии с выражением
в соответствии с выражением
где  - значения пространственных координат ВС в заданной ПСК OXYZ, сформированные с использованием информации, содержащейся в СС j-й ГНСС на контрольный момент времени
- значения пространственных координат ВС в заданной ПСК OXYZ, сформированные с использованием информации, содержащейся в СС j-й ГНСС на контрольный момент времени 
 - значения пространственных координат ВС в заданной ПСК OXYZ, сформированные с использованием информации, содержащейся в спутниковых сигналах контрольной ГНСС на контрольный момент времени
- значения пространственных координат ВС в заданной ПСК OXYZ, сформированные с использованием информации, содержащейся в спутниковых сигналах контрольной ГНСС на контрольный момент времени 
Примечание: под j-й вторичной парой ГНСС понимается пара ГНСС, состоящая из контрольной ГНСС и j-й ГНСС, не относящейся к ПДП.
2.25 Формирование для каждого j вторичных пар ГНСС решения  о достоверности или недостоверности информации, принимаемой НАП ВС от спутников j-й ГНСС на контрольный момент времени
о достоверности или недостоверности информации, принимаемой НАП ВС от спутников j-й ГНСС на контрольный момент времени  в соответствии с выражением
в соответствии с выражением

где
Этапы 2.26-2.27 выполняются только в случае, если на этапе 2.8 определено значение  и на этапе 2.17 определено значение
и на этапе 2.17 определено значение 
2.26 Определение прогнозируемой оценки  расстояния между ВС и ЛККС на контрольный момент времени
расстояния между ВС и ЛККС на контрольный момент времени  в соответствии с выражением
в соответствии с выражением

где  - контрольная оценка расстояния между ВС и ЛККС на контрольный момент времени
- контрольная оценка расстояния между ВС и ЛККС на контрольный момент времени 
 - контрольная оценка расстояния между ВС и ЛККС на контрольный момент времени
- контрольная оценка расстояния между ВС и ЛККС на контрольный момент времени 
Примечание: в соответствии с выражением (23) значение прогнозируемой оценки  расстояния между ВС и ЛККС определяется на контрольный момент времени
расстояния между ВС и ЛККС определяется на контрольный момент времени  исходя из условия прямолинейного движения ВС с постоянной скоростью на интервале
исходя из условия прямолинейного движения ВС с постоянной скоростью на интервале  При этом из выражения (23) видно, что для определения прогнозируемой оценки
При этом из выражения (23) видно, что для определения прогнозируемой оценки  на контрольный момент времени
на контрольный момент времени  необходимо наличие контрольных оценок
необходимо наличие контрольных оценок  на два предыдущих контрольных момента времени
на два предыдущих контрольных момента времени  и
и  формирование которых в соответствии с выражением (7) возможно только при наличии как минимум двух принятых ДИП. Как было показано ранее (см. пункт 2.4), наличие как минимум двух принятых ДИП к любому контрольному моменту времени обеспечивается тем, что в качестве первого контрольного момента времени
формирование которых в соответствии с выражением (7) возможно только при наличии как минимум двух принятых ДИП. Как было показано ранее (см. пункт 2.4), наличие как минимум двух принятых ДИП к любому контрольному моменту времени обеспечивается тем, что в качестве первого контрольного момента времени  принимается момент времени
принимается момент времени  приема второй ДИП.
приема второй ДИП.
2.27 Формирование для каждого у решения  о достоверности или недостоверности информации, принимаемой НАП ВС от спутников j-й ГНСС, на контрольный момент времени
о достоверности или недостоверности информации, принимаемой НАП ВС от спутников j-й ГНСС, на контрольный момент времени  в соответствии с выражением
в соответствии с выражением

Примечание: в соответствии с выражением (24) решение  о недостоверности информации, принимаемой НАП ВС от спутников j-й ГНСС, на контрольный момент времени
о недостоверности информации, принимаемой НАП ВС от спутников j-й ГНСС, на контрольный момент времени  формируется в том случае, если j-й модуль разности базовой
формируется в том случае, если j-й модуль разности базовой  и прогнозируемой
и прогнозируемой  оценок расстояний превышает заданное пороговое значение h, в противном случае формируется решение
оценок расстояний превышает заданное пороговое значение h, в противном случае формируется решение  о достоверности информации, принимаемой НАП ВС от спутников j-й ГНСС, на контрольный момент времени
о достоверности информации, принимаемой НАП ВС от спутников j-й ГНСС, на контрольный момент времени 
Таким образом, в соответствии с этапами 2.12-2.25, в случае отсутствия принятой ДИП в допустимом временном интервале на контрольный момент времени, осуществляется определение ПДП ГНСС путем сопоставления значений пространственных координат ВС, формируемых с использованием поступающих от данных ГНСС спутниковых сигналов. В случае наличия ПДП, информация, принимаемая НАП от спутников ГНСС, относящихся к ПДП признается достоверной, а в отношении ГНСС не относящихся к ПДП производится дополнительный контроль достоверности принимаемой от их спутников информации путем сопоставления значений пространственных координат ВС, формируемых с использованием СС, принимаемых от данных ГНСС, и контрольной ГНСС, относящейся к ПДП. Контроль достоверности принимаемой НАП информации с использованием прогнозируемой оценки расстояния между ВС и ЛККС в соответствии с этапами 2.26-2.27 осуществляется только в случае одновременного отсутствия принятой ДИП в допустимом временном интервале и ПДП ГНСС на контрольный момент времени. Это позволяет, в случае отсутствия принятой ДИП и наличия первично-достоверных пар ГНСС, исключить ошибки контроля достоверности принимаемой НАП информации, вызванные увеличением продолжительности отсутствия принятых ДИП и, как следствие, приводит к повышению вероятности правильного контроля достоверности принимаемой НАП информации в целом.
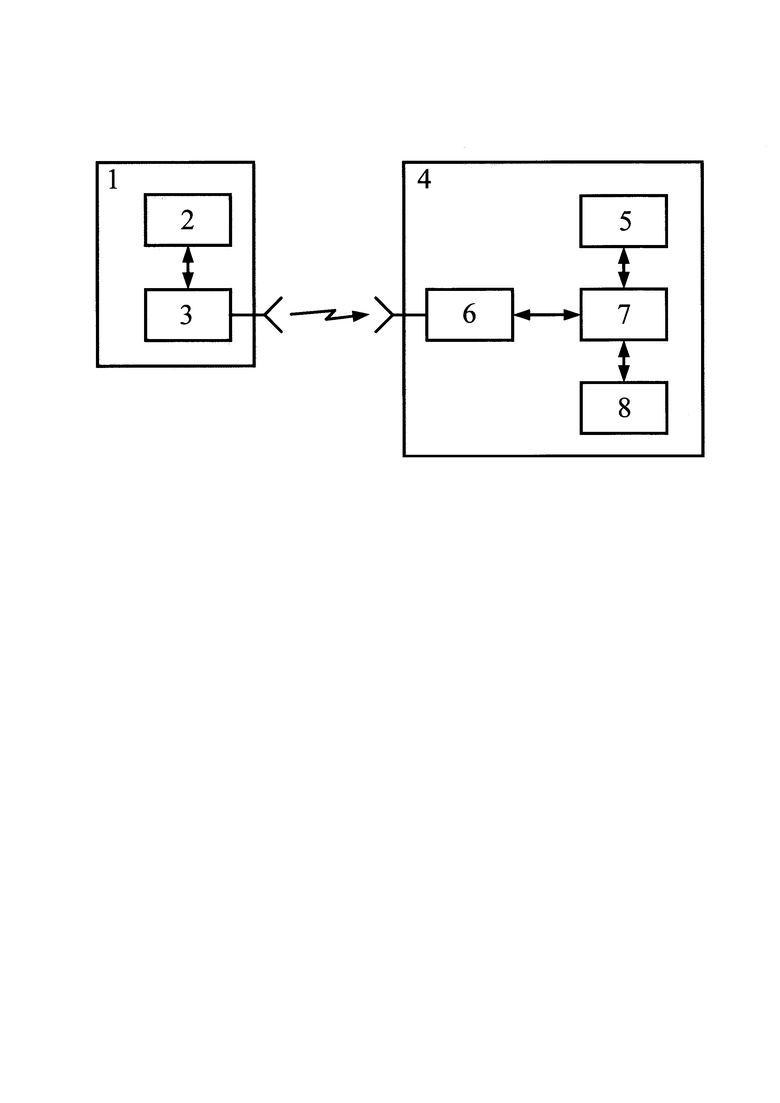
Данный способ может быть реализован, например, с помощью комплекса устройств, структурная схема которого приведена на фигуре, где обозначено: 1 - ЛККС; 2 - блок управления (БУ); 3 - аппаратура формирования и передачи дополнительной информационной посылки (АФП ДИП); 4 - ВС, взаимодействующее с ЛККС; 5 - Блок обработки информации (БОИ); 6 - приемник дополнительной информационной посылки (ПРМ ДИП); 7 - блок согласования и управления (БСУ); 8 - НАП.
БУ 2 предназначен для управления АФП ДИП 3 и определения моментов времени  передачи ДИП. АФП ДИП 3 предназначена для формирования и передачи в определенные моменты времени
передачи ДИП. АФП ДИП 3 предназначена для формирования и передачи в определенные моменты времени  ДИП
ДИП  БОИ 5 предназначен для обработки информации и формирования решения
БОИ 5 предназначен для обработки информации и формирования решения  о достоверности или недостоверности информации, принимаемой НАП ВС от спутников j-й ГНСС, на контрольный момент времени
о достоверности или недостоверности информации, принимаемой НАП ВС от спутников j-й ГНСС, на контрольный момент времени  на борту ВС 4. ПРМ ДИП 6 предназначен для приема ДИП Vm и фиксации момента времени
на борту ВС 4. ПРМ ДИП 6 предназначен для приема ДИП Vm и фиксации момента времени  их приема. БСУ 7 предназначен для согласования элементов комплекса между собой на борту ВС 4 и управления ими. НАП 8 предназначена для приема и обработки спутниковых сигналов от j-х ГНСС, а также для формирования значений
их приема. БСУ 7 предназначен для согласования элементов комплекса между собой на борту ВС 4 и управления ими. НАП 8 предназначена для приема и обработки спутниковых сигналов от j-х ГНСС, а также для формирования значений  пространственных координат ВС в заданной ПСК OXYZ.
пространственных координат ВС в заданной ПСК OXYZ.
Комплекс работает следующим образом. БУ 2 управляет АФП ДИП 3 и определяет моменты времени  передачи ДИП в соответствии с этапом 1.1. на стороне ЛККС 1. Значения
передачи ДИП в соответствии с этапом 1.1. на стороне ЛККС 1. Значения  с выхода БУ 2 поступают на вход АФП ДИП 3. АФП ДИП 3 под управлением БУ 2 формирует и передает в определенные моменты времени
с выхода БУ 2 поступают на вход АФП ДИП 3. АФП ДИП 3 под управлением БУ 2 формирует и передает в определенные моменты времени  ДИП
ДИП  БСУ 7 обеспечивает согласование элементов комплекса между собой на борту ВС 4 и управляет ими. НАП 8 принимает и обрабатывает спутниковые сигналы от каждой j-й ГНСС, а также формирует для каждого у значения
БСУ 7 обеспечивает согласование элементов комплекса между собой на борту ВС 4 и управляет ими. НАП 8 принимает и обрабатывает спутниковые сигналы от каждой j-й ГНСС, а также формирует для каждого у значения  пространственных координат ВС в заданной ПСК OXYZ с использованием информации, содержащейся в спутниковых сигналах j-й ГНСС. Значения
пространственных координат ВС в заданной ПСК OXYZ с использованием информации, содержащейся в спутниковых сигналах j-й ГНСС. Значения  с выхода НАП 8 поступают через БСУ 7 на вход БОИ 5. ПРМ ДИП 6 принимает ДИП
с выхода НАП 8 поступают через БСУ 7 на вход БОИ 5. ПРМ ДИП 6 принимает ДИП  и фиксирует моменты времени
и фиксирует моменты времени  их приема. Значения
их приема. Значения  с выхода ПРМ ДИП 6 поступают через БСУ 7 на вход БОИ 5. БОИ 5 обрабатывает поступающую на его вход информацию и формирует для каждого у решение
с выхода ПРМ ДИП 6 поступают через БСУ 7 на вход БОИ 5. БОИ 5 обрабатывает поступающую на его вход информацию и формирует для каждого у решение  о достоверности или недостоверности информации, принимаемой НАП ВС от спутников j-й ГНСС, на контрольный момент времени
о достоверности или недостоверности информации, принимаемой НАП ВС от спутников j-й ГНСС, на контрольный момент времени  в соответствии с этапами 2.4-2.27.
в соответствии с этапами 2.4-2.27.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ контроля достоверности информации, принимаемой НАП ВС, сущность которого заключается в том, что в случае отсутствия принятой ДИП в допустимом временном интервале на контрольный момент времени, осуществляется определение ПДП ГНСС путем сопоставления значений пространственных координат ВС, формируемых с использованием поступающих от данных ГНСС спутниковых сигналов. В случае наличия ПДП, информация, принимаемая НАП от спутников ГНСС, относящихся к ПДП признается достоверной, а в отношении ГНСС не относящихся к ПДП производится дополнительный контроль достоверности принимаемой от их спутников информации путем сопоставления значений пространственных координат ВС, формируемых с использованием СС, принимаемых от данных ГНСС и контрольной ГНСС, относящейся к ПДП. Контроль достоверности принимаемой НАП информации с использованием прогнозируемой оценки расстояния между ВС и осуществляется только в случае одновременного отсутствия принятой ДИП в допустимом временном интервале и ПДП ГНСС на контрольный момент времени.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что для повышения вероятности правильного контроля достоверности информации, принимаемой НАП, в рамках прототипа необходимо: в случае отсутствия принятой ДИП в допустимом временном интервале на контрольный момент времени, осуществлять определение ПДП ГНСС путем сопоставления значений пространственных координат ВС, формируемых с использованием поступающих от данных ГНСС спутниковых сигналов; в случае наличия ПДП, информацию, принимаемую НАП от спутников ГНСС, относящихся к ПДП признавать достоверной, а в отношении ГНСС не относящихся к ПДП производить дополнительный контроль достоверности принимаемой от их спутников информации путем сопоставления значений пространственных координат ВС, формируемых с использованием СС, принимаемых от данных ГНСС и контрольной ГНСС, относящейся к ПДП; контроль достоверности принимаемой НАП информации с использованием прогнозируемой оценки расстояния между ВС и ЛККС осуществлять только в случае одновременного отсутствия принятой ДИП в допустимом временном интервале и ПДП ГНСС на контрольный момент времени.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств контроля целостности навигационного поля глобальных навигационных спутниковых систем (ГНСС) в части, касающейся контроля достоверности информации, принимаемой навигационной аппаратурой потребителя (НАП) воздушного судна (ВС). Техническим результатом является повышение вероятности правильного контроля достоверности информации, принимаемой НАП. Сущность изобретения заключается в том, что, в случае отсутствия принятой дополнительной информационной посылки (ДИП) в допустимом временном интервале на контрольный момент времени, осуществляется определение первично-достоверных пар (ПДП) ГНСС путем сопоставления значений пространственных координат ВС, формируемых с использованием поступающих от данных ГНСС спутниковых сигналов. В случае наличия ПДП, информация, принимаемая НАП от спутников ГНСС, относящихся к ПДП, признается достоверной, а в отношении ГНСС, не относящихся к ПДП, производится дополнительный контроль достоверности принимаемой от их спутников информации путем сопоставления значений пространственных координат ВС, формируемых с использованием спутниковых сигналов, принимаемых от данных ГНСС, и контрольной ГНСС, относящейся к ПДП. Контроль достоверности принимаемой НАП информации с использованием прогнозируемой оценки расстояния между ВС и локальной контрольно-корректирующей станцией осуществляется только в случае одновременного отсутствия принятой ДИП в допустимом временном интервале и ПДП ГНСС на контрольный момент времени. Это позволяет, в случае отсутствия принятой ДИП и наличия ПДП ГНСС, исключить ошибки контроля достоверности принимаемой НАП информации, вызванные увеличением продолжительности отсутствия принятых ДИП и, как следствие, приводит к повышению вероятности правильного контроля достоверности принимаемой НАП информации в целом. 1 ил.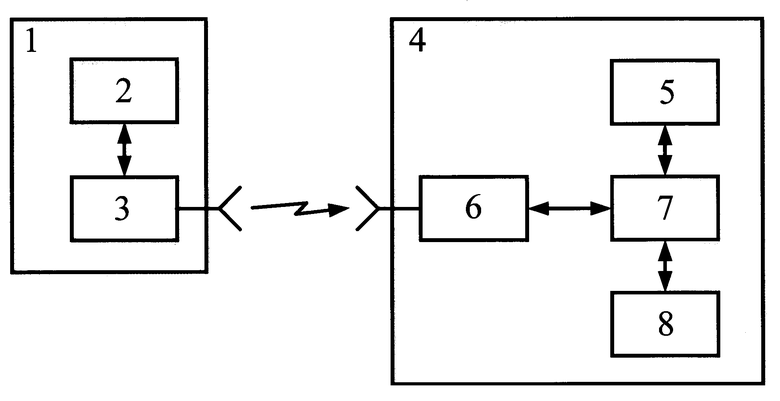
Способ контроля достоверности информации, принимаемой навигационной аппаратурой потребителя (НАП) воздушного судна, заключающийся в том, что на стороне наземной стационарной локальной контрольно-корректирующей станции (ЛККС), имеющей заранее точно определенные координаты х0=[х0,у0,z0] своей дислокации в заданной прямоугольной системе координат (ПСК) OXYZ, определяют моменты времени tПер.i передачи дополнительных информационных посылок (ДИП), где  I - число ДИП, передаваемых на протяжении полета ВС, формируют и передают по радиоканалу в моменты tПер.i ДИП Vi=[tПер.i,х0], содержащие значения tПер.i и х0, на борту ВС, взаимодействующего с ЛККС, на протяжении полета ВС принимают и обрабатывают спутниковые сигналы (СС) от каждой j-й глобальной навигационной спутниковой системы (ГНСС) с помощью НАП, где
I - число ДИП, передаваемых на протяжении полета ВС, формируют и передают по радиоканалу в моменты tПер.i ДИП Vi=[tПер.i,х0], содержащие значения tПер.i и х0, на борту ВС, взаимодействующего с ЛККС, на протяжении полета ВС принимают и обрабатывают спутниковые сигналы (СС) от каждой j-й глобальной навигационной спутниковой системы (ГНСС) с помощью НАП, где  J - число действующих ГНСС, формируют для каждого j значения хНАПj пространственных координат ВС в ПСК OXYZ с использованием информации, содержащейся в СС j-й ГНСС, принимают ДИП Vm и фиксируют моменты времени tПр.m их приема, где
J - число действующих ГНСС, формируют для каждого j значения хНАПj пространственных координат ВС в ПСК OXYZ с использованием информации, содержащейся в СС j-й ГНСС, принимают ДИП Vm и фиксируют моменты времени tПр.m их приема, где  М - число принятых ДИП на протяжении полета ВС, М≤I, с использованием момента времени tПр.2 приема второй ДИП и заданного интервала времени между контрольными моментами времени определяют очередной контрольный момент времени tKl, определяют из совокупности моментов времени {tПр.m} приема ДИП для момента tKl соответствующий ему момент времени tПр.l приема ДИП, определяют из совокупности принятых ДИП {Vm} для момента tKl соответствующую ему ДИП Vl=[tПер.l,x0], содержащую момент времени tПер.i передачи данной ДИП и значения х0, с использованием значений xHAПjl и х0 определяют базовую оценку Rjl расстояния между ВС и ЛККС на момент tKl для каждого j, где xHAПjl - значения пространственных координат ВС в ПСК OXYZ на момент tKl, сформированные с использованием информации, содержащейся в СС j-й ГНСС, с использованием значений tKl, tПр.l и ΔДоп. определяют значение χl индикатора наличия ДИП, где ΔДоп. - допустимый временной интервал, χl=[0,1], χl=1 - в интервале ΔДоп. на момент tKl имеется принятая ДИП, χl=0 - в интервале ΔДоп. на момент tKl отсутствует принятая ДИП, если определено значение χl=1, то с использованием значений tПр.l и tПер.l определяют контрольную оценку RKl расстояния между ВС и ЛККС на момент tKl, если j-й модуль разности базовой Rjl, и контрольной RKl оценок превышает заданное пороговое значение h, то формируют решение qjl=0 о недостоверности информации принимаемой НАП от спутников j-й ГНСС на момент tKl, в противном случае формируют решение qjl=1 о достоверности информации принимаемой НАП от спутников j-й ГНСС на момент tKl, отличающийся тем, что если определено значение χl=0, то с использованием значения J определяют минимальное число K первичных пар (ПП) ГНСС, с использованием значений k и J определяют номера k1(k) и k2(k) первых и вторых ГНСС соответственно для каждой k-й ПП, где
М - число принятых ДИП на протяжении полета ВС, М≤I, с использованием момента времени tПр.2 приема второй ДИП и заданного интервала времени между контрольными моментами времени определяют очередной контрольный момент времени tKl, определяют из совокупности моментов времени {tПр.m} приема ДИП для момента tKl соответствующий ему момент времени tПр.l приема ДИП, определяют из совокупности принятых ДИП {Vm} для момента tKl соответствующую ему ДИП Vl=[tПер.l,x0], содержащую момент времени tПер.i передачи данной ДИП и значения х0, с использованием значений xHAПjl и х0 определяют базовую оценку Rjl расстояния между ВС и ЛККС на момент tKl для каждого j, где xHAПjl - значения пространственных координат ВС в ПСК OXYZ на момент tKl, сформированные с использованием информации, содержащейся в СС j-й ГНСС, с использованием значений tKl, tПр.l и ΔДоп. определяют значение χl индикатора наличия ДИП, где ΔДоп. - допустимый временной интервал, χl=[0,1], χl=1 - в интервале ΔДоп. на момент tKl имеется принятая ДИП, χl=0 - в интервале ΔДоп. на момент tKl отсутствует принятая ДИП, если определено значение χl=1, то с использованием значений tПр.l и tПер.l определяют контрольную оценку RKl расстояния между ВС и ЛККС на момент tKl, если j-й модуль разности базовой Rjl, и контрольной RKl оценок превышает заданное пороговое значение h, то формируют решение qjl=0 о недостоверности информации принимаемой НАП от спутников j-й ГНСС на момент tKl, в противном случае формируют решение qjl=1 о достоверности информации принимаемой НАП от спутников j-й ГНСС на момент tKl, отличающийся тем, что если определено значение χl=0, то с использованием значения J определяют минимальное число K первичных пар (ПП) ГНСС, с использованием значений k и J определяют номера k1(k) и k2(k) первых и вторых ГНСС соответственно для каждой k-й ПП, где  определяют значения Δxkl=[Δxkl,Δykl,Δzkl] абсолютных невязок между значениями xНАПk1l и хНАПk2l пространственных координат ВС, сформированными НАП с использованием информации, содержащейся в СС k-й первичной пары ГНСС на момент tKl, с использованием значений Δxkl и ΔНАП определяют для каждого k значение wkl индикатора достоверности информации, принимаемой НАП от спутников k-й первичной пары (ПП) ГНСС на момент tKl, при этом если значения Δxkl, Δуkl и Δzkl не превышают значение ΔНАП, то формируют решение
определяют значения Δxkl=[Δxkl,Δykl,Δzkl] абсолютных невязок между значениями xНАПk1l и хНАПk2l пространственных координат ВС, сформированными НАП с использованием информации, содержащейся в СС k-й первичной пары ГНСС на момент tKl, с использованием значений Δxkl и ΔНАП определяют для каждого k значение wkl индикатора достоверности информации, принимаемой НАП от спутников k-й первичной пары (ПП) ГНСС на момент tKl, при этом если значения Δxkl, Δуkl и Δzkl не превышают значение ΔНАП, то формируют решение  в противном случае формируют решение
в противном случае формируют решение  , где ΔНАП - заданная допустимая невязка,
, где ΔНАП - заданная допустимая невязка,  - информация, принимаемая НАП от спутников k-й ПП ГНСС, является достоверной на момент tKl,
- информация, принимаемая НАП от спутников k-й ПП ГНСС, является достоверной на момент tKl,  - информация, принимаемая НАП от спутников k-й ПП ГНСС является недостоверной на момент tKl, с использованием значений
- информация, принимаемая НАП от спутников k-й ПП ГНСС является недостоверной на момент tKl, с использованием значений  определяют значение gl индикатора наличия первично-достоверных пар (ПДП) ГНСС на момент tKl, где gl=[0,1], gl=0 - ПДП ГНСС на момент tKl отсутствуют; gl=1 - ПДП ГНСС на момент tKl имеются, если определено значение gl=1, то с использованием значений и K определяют значение Gl индикатора полной достоверности ПП ГНСС на момент tKl, где Gl=[0,1], Gl=0 - не все ПП ГНСС являются ПДП на момент tKl; Gl=1 - все ПП ГНСС являются ПДП на момент tKl, если определено значение Gl=1, то формируют для каждого j решение qjl=1, если определено значение Gl=0, то с использованием значений
определяют значение gl индикатора наличия первично-достоверных пар (ПДП) ГНСС на момент tKl, где gl=[0,1], gl=0 - ПДП ГНСС на момент tKl отсутствуют; gl=1 - ПДП ГНСС на момент tKl имеются, если определено значение gl=1, то с использованием значений и K определяют значение Gl индикатора полной достоверности ПП ГНСС на момент tKl, где Gl=[0,1], Gl=0 - не все ПП ГНСС являются ПДП на момент tKl; Gl=1 - все ПП ГНСС являются ПДП на момент tKl, если определено значение Gl=1, то формируют для каждого j решение qjl=1, если определено значение Gl=0, то с использованием значений  определяют номер r1 контрольной ГНСС, с использованием значений j=k1(k) и j=k2(k) определяют значение
определяют номер r1 контрольной ГНСС, с использованием значений j=k1(k) и j=k2(k) определяют значение  индикатора отношения j-й ГНСС к ПДП на момент tKl, где
индикатора отношения j-й ГНСС к ПДП на момент tKl, где  j-я ГНСС относится к ПДП ГНСС на момент tKl, j-я ГНСС не относится к ПДП ГНСС на момент tKl, если в отношении j -й ГНСС определено значение wyV=1, то формируют решение qjt=1, если в отношении j-й ГНСС определено значение
j-я ГНСС относится к ПДП ГНСС на момент tKl, j-я ГНСС не относится к ПДП ГНСС на момент tKl, если в отношении j -й ГНСС определено значение wyV=1, то формируют решение qjt=1, если в отношении j-й ГНСС определено значение  то определяют значения Δхjl=[Δxjl,Δyjl,Δzjl] абсолютных невязок между значениями хНАПjl и хНАПrl пространственных координат ВС, сформированными НАП с использованием информации, содержащейся в СС j-й вторичной пары ГНСС на момент tKl, где xHAПjl - значения пространственных координат ВС, сформированные с использованием информации, содержащейся в СС j-й ГНСС на момент tKl, xHAПrl - значения пространственных координат ВС, сформированные с использованием информации, содержащейся в СС контрольной ГНСС на момент tKl, с использованием значений Δхjl и ΔНАП формируют для каждого j вторичных пар ГНСС решение qjl, при этом если значения Δxjl, Δyjl и Δzjl не превышают значение DНАП, то формируют решение qjl=1, в противном случае формируют решение qjl=0, осуществляют контроль достоверности принимаемой НАП информации с использованием прогнозируемой оценки RПрог.l расстояния между ВС и ЛККС на момент tKl только в том случае, если определены значения χl=0 и gl=0, при этом с использованием контрольных оценок RK(l-1) и RK(l-2) на моменты tK(l-1) и tK(l-2) соответственно определяют прогнозируемую оценку RПрог.l, если j-й модуль разности базовой Rjl и прогнозируемой RПрог.l оценок превышает значение h, то формируют решение qjl=0, в противном случае формируют решение qjl=1.
то определяют значения Δхjl=[Δxjl,Δyjl,Δzjl] абсолютных невязок между значениями хНАПjl и хНАПrl пространственных координат ВС, сформированными НАП с использованием информации, содержащейся в СС j-й вторичной пары ГНСС на момент tKl, где xHAПjl - значения пространственных координат ВС, сформированные с использованием информации, содержащейся в СС j-й ГНСС на момент tKl, xHAПrl - значения пространственных координат ВС, сформированные с использованием информации, содержащейся в СС контрольной ГНСС на момент tKl, с использованием значений Δхjl и ΔНАП формируют для каждого j вторичных пар ГНСС решение qjl, при этом если значения Δxjl, Δyjl и Δzjl не превышают значение DНАП, то формируют решение qjl=1, в противном случае формируют решение qjl=0, осуществляют контроль достоверности принимаемой НАП информации с использованием прогнозируемой оценки RПрог.l расстояния между ВС и ЛККС на момент tKl только в том случае, если определены значения χl=0 и gl=0, при этом с использованием контрольных оценок RK(l-1) и RK(l-2) на моменты tK(l-1) и tK(l-2) соответственно определяют прогнозируемую оценку RПрог.l, если j-й модуль разности базовой Rjl и прогнозируемой RПрог.l оценок превышает значение h, то формируют решение qjl=0, в противном случае формируют решение qjl=1.
| СПОСОБ КОНТРОЛЯ ДОСТОВЕРНОСТИ ИНФОРМАЦИИ, ПРИНИМАЕМОЙ НАВИГАЦИОННОЙ АППАРАТУРОЙ ПОТРЕБИТЕЛЯ ВОЗДУШНОГО СУДНА | 2021 |
|
RU2777836C1 |
| СПОСОБ КОНТРОЛЯ ДОСТОВЕРНОСТИ ИНФОРМАЦИИ, ПРИНИМАЕМОЙ НАВИГАЦИОННОЙ АППАРАТУРОЙ ПОТРЕБИТЕЛЯ ВОЗДУШНОГО СУДНА | 2020 |
|
RU2740398C1 |
| СПОСОБ ПОВЫШЕНИЯ ЦЕЛОСТНОСТИ ИСПОЛЬЗУЕМЫХ СИГНАЛОВ НАВИГАЦИОННЫХ СПУТНИКОВ С ПОМОЩЬЮ ЛОКАЛЬНОЙ КОНТРОЛЬНО-КОРРЕКТИРУЮЩЕЙ СТАНЦИИ (ЛККС) С УЧЕТОМ ВЛИЯНИЯ АНОМАЛЬНОЙ ИОНОСФЕРЫ | 2013 |
|
RU2542326C1 |
| СПОСОБ КОНТРОЛЯ ДОСТОВЕРНОСТИ ДАННЫХ СИСТЕМЫ АВТОМАТИЧЕСКОГО ЗАВИСИМОГО НАБЛЮДЕНИЯ | 2017 |
|
RU2667494C1 |
| EP 2987036 B1, 11.08.2021 | |||
| WO 2020126596 A1, 25.06.2020 | |||
| CN 101833101 A, 15.09.2010. | |||
