Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств контроля целостности навигационного поля глобальных навигационных спутниковых систем (ГНСС) в части, касающейся контроля достоверности информации, принимаемой навигационной аппаратурой потребителя (НАП) воздушного судна (ВС).
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ определения недопустимой аномалии принимаемых радиосигналов навигационных спутников (см., например, патент на изобретение №2393504 от 23 октября 2008 г.), характеризующийся тем, что наземная стационарная локальная контрольно-корректирующая станция (ЛККС), имеющая заранее точно определенные координаты своей дислокации, принимает и обрабатывает радиосигналы группы радиовидимых навигационных спутников (НС) действующих ГНСС, при этом получают расчетные данные координат ЛККС для различных ГНСС, при их совпадении/несовпадении в допуске между собой и с контрольными данными координат дислокации самой ЛККС вырабатывают решение об исправности/неисправности конкретных НС соответствующих ГНСС, на основании чего блокируют использование некондиционных НС до их реабилитации, формируют и запоминают полученные при использовании кондиционных НС дифференциальные поправки к кодам псевдодальности, передают информацию о поправках к данным и возможности/невозможности использования НС или ГНСС.
К основным недостаткам прототипа относится снижение вероятности правильного контроля достоверности информации, принимаемой НАП ВС (снижение вероятности правильного установления факта недопустимой аномалии принимаемых радиосигналов навигационных спутников в точке их приема НАП ВС) в условиях различной сигнально-помеховой обстановки в точках расположения НАП ЛККС и НАП ВС (под контролем достоверности информации в данном случае понимается установление факта соответствия или несоответствия достоверности данной информации заданным требованиям). Такая ситуация может возникнуть, например, под воздействием внешних факторов (помех), которые оказывают существенное влияние на спутниковые сигналы на входе приемника НАП ВС и приводят к недопустимому нарушению (искажению) содержащейся в них информации, но при этом не оказывают существенного влияния на данные сигналы на входе приемника НАП ЛККС.
Техническим результатом изобретения является повышение вероятности правильного контроля достоверности информации, принимаемой НАП ВС.
Указанный результат достигается тем, что в известном способе на стороне наземной стационарной ЛККС, имеющей заранее точно определенные координаты своей дислокации в заданной прямоугольной системе координат OXYZ, определяют моменты времени передачи дополнительных информационных посылок, формируют и передают по радиоканалу на ВС, взаимодействующее с ЛККС, в определенные моменты времени дополнительные информационные посылки, содержащие момент времени передачи данной посылки и пространственные координаты ЛККС в заданной прямоугольной системе координат OXYZ, на борту ВС, взаимодействующего с ЛККС, формируют оценки собственных пространственных координат в заданной прямоугольной системе координат OXYZ с использованием НАП ВС каждой j-й ГНСС, где  J - число действующих ГНСС, принимают дополнительную информационную посылку и фиксируют момент времени ее приема, определяют первую оценку расстояния R1 между ВС и ЛККС по разнице между моментами приема и передачи дополнительной информационной посылки, определяют для каждого j вторую оценку расстояния R2j между ВС и ЛККС по пространственным координатам ВС и ЛККС, при этом используют пространственные координаты ЛККС, переданные в дополнительной информационной посылке и j-е оценки пространственных координат ВС, каждая из которых сформирована с использованием содержащейся в спутниковых сигналах j-й ГНСС информации, сравнивают для каждого j модуль разности оценок расстояний R1 и R2j с заданным пороговым значением h, если j-й модуль разности оценок расстояний Rl и R2j превышает заданное пороговое значение h, то формируют решение о том, что достоверность информации, принимаемой НАП ВС от спутников j-й ГНСС, не соответствует заданным требованиям, в противном случае формируют решение о том, что достоверность информации, принимаемой НАП ВС от спутников j-й ГНСС, соответствует заданным требованиям.
J - число действующих ГНСС, принимают дополнительную информационную посылку и фиксируют момент времени ее приема, определяют первую оценку расстояния R1 между ВС и ЛККС по разнице между моментами приема и передачи дополнительной информационной посылки, определяют для каждого j вторую оценку расстояния R2j между ВС и ЛККС по пространственным координатам ВС и ЛККС, при этом используют пространственные координаты ЛККС, переданные в дополнительной информационной посылке и j-е оценки пространственных координат ВС, каждая из которых сформирована с использованием содержащейся в спутниковых сигналах j-й ГНСС информации, сравнивают для каждого j модуль разности оценок расстояний R1 и R2j с заданным пороговым значением h, если j-й модуль разности оценок расстояний Rl и R2j превышает заданное пороговое значение h, то формируют решение о том, что достоверность информации, принимаемой НАП ВС от спутников j-й ГНСС, не соответствует заданным требованиям, в противном случае формируют решение о том, что достоверность информации, принимаемой НАП ВС от спутников j-й ГНСС, соответствует заданным требованиям.
Сущность изобретения заключается в том, что решение о соответствии или несоответствии достоверности принимаемой НАП ВС информации заданным требованиям формируется на основе сравнения оценок расстояний между ВС и ЛККС, определяемых в одном случае по разнице между моментами приема и передачи дополнительной информационной посылки, передаваемой с ЛККС на борт ВС, а во втором случае по пространственным координатам ВС и ЛККС, при этом используются пространственные координаты ЛККС, переданные в дополнительной информационной посылке и оценки пространственных координат ВС, сформированные по содержащейся в спутниковых сигналах информации, достоверность которой контролируется. Это позволяет выявлять факты несоответствия достоверности информации заданным требованиям в точке ее приема НАП ВС даже при условии соответствия достоверности данной информации заданным требованиям в точке ее приема НАП ЛККС и приводит к повышению вероятности правильного контроля достоверности информации, принимаемой НАП ВС в целом.
Данный способ включает в себя следующие этапы:
1 На стороне наземной стационарной ЛККС, имеющей заранее точно определенные координаты х0 = [х0, y0, z0] своей дислокации в заданной прямоугольной системе координат OXYZ:
1.1 Определение моментов времени ti0 передачи дополнительных информационных посылок в соответствии с выражением

где t1 - заданный первый момент времени передачи дополнительной информационной посылки, I = 0, 1, 2, 3, …, Δt - установленный интервал времени между моментами времени передачи дополнительных информационных посылок.
1.2 Формирование и передача по радиоканалу в определенные моменты времени ti0 дополнительных информационные посылок Vi = [ti0, x0], содержащих момент времени ti0 передачи данной посылки и пространственные координаты ЛККС х0 в заданной прямоугольной системе координат OXYZ.
2. На борту воздушного судна, взаимодействующего с ЛККС:
2.1 Прием и обработка спутниковых сигналов от каждой j-й ГНСС с помощью соответствующей НАП.
2.2 Формирование для каждого  оценок собственных пространственных координат x1j = [xlj, ylj, zlj] в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах j-й ГНСС.
оценок собственных пространственных координат x1j = [xlj, ylj, zlj] в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах j-й ГНСС.
2.3 Прием дополнительной информационной посылки Vi =[ti0, x0] и фиксация момента времени ti1 ее приема.
2.4 Определение первой оценки расстояния между ВС и ЛККС в соответствии с выражением

2.5 Определение для каждого j второй оценки расстояния между ВС и ЛККС в соответствии с выражением

2.6 Формирование решения о соответствии или несоответствии достоверности информации, принимаемой НАП ВС от спутников j-й ГНСС, заданным требованиям, в соответствии с выражением

где qj = 0 - достоверность информации, принимаемой НАП ВС от спутников j-й ГНСС, не соответствует заданным требованиям; q = 1 - достоверность информации, принимаемой НАП ВС от спутников j-й ГНСС, соответствует заданным требованиям, h - заданное пороговое значение.
В соответствии с выражениями (1) - (4) решение о том, что достоверность информации, принимаемой НАП ВС от спутников j-й ГНСС, не соответствует заданным требованиям формируется в том случае, если j-й модуль разности оценок расстояний R1 и R2j превышает заданное пороговое значение h, в противном случае формируется решение о том, что достоверность информации, принимаемой НАП ВС от спутников j-й ГНСС, соответствует заданным требованиям.
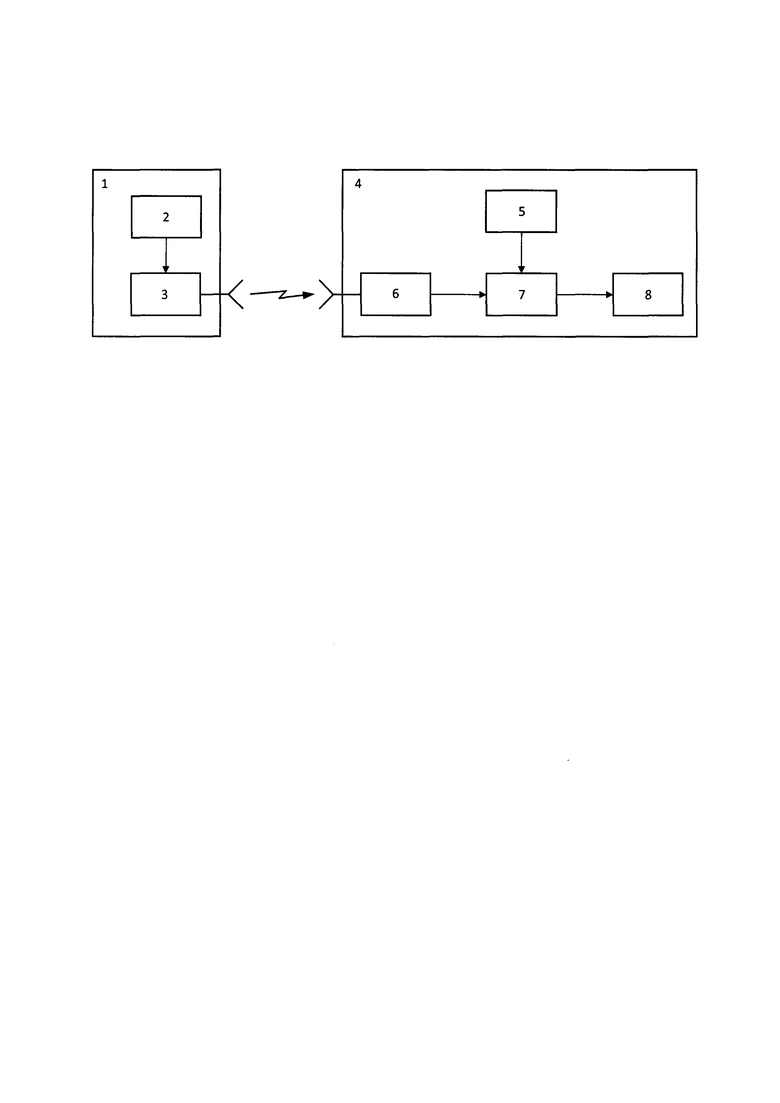
Данный способ может быть реализован, например, с помощью комплекса устройств, структурная схема которого приведена на фигуре 1, где обозначено: 1 - ЛККС; 2 - блок управления (БУ); 3 - аппаратура формирования и передачи дополнительной информационной посылки (АФП ДИП); 4 - ВС, взаимодействующее с ЛККС; 5 - НАП; 6 - приемник дополнительной информационной посылки (ПРМ ДИП); 7 - БУ; 8 - блок обработки информации (БОИ).
БУ 2 предназначен для определения моментов времени ti0 передачи дополнительных информационных посылок в соответствии с выражением (1) и управления АФП ДИП 3. АФП ДИП 3 предназначена для формирования и передачи в определенные моменты времени ti0 дополнительных информационные посылок Vi = [ti0, x0]. НАП 5 предназначена для приема и обработки спутниковых сигналов от j-й ГНСС, а также для формирования оценок пространственных координат ВС x1j = [xlj, ylj, zlj] в заданной прямоугольной системе координат OXYZ. ПРМ ДИП 6 предназначен для приема дополнительной информационной посылки Vi = [ti0, х0] и фиксации момента времени ti1 ее приема. БУ 7 предназначен для управления элементами комплекса на борту ВС 4. БОИ 8 предназначен для обработки информации и формирования решения о соответствии или несоответствии достоверности информации, принимаемой НАП 5 от спутников j-й ГНСС, заданным требованиям, в соответствии с выражениями (2) - (4).
Комплекс работает следующим образом. БУ 2 определяет моменты времени ti0 передачи дополнительных информационных посылок в соответствии с выражением (1) и управляет АФП ДИП 3. АФП ДИП 3 формирует и под управлением БУ 2 передает в определенные моменты времени ti0 дополнительные информационные посылки Vi = [ti0, x0]. БУ 7 управляет элементами комплекса на борту ВС 4. НАП 5 принимает и обрабатывает спутниковые сигналы от j-й ГНСС, а также формирует оценки пространственных координат ВС xlj = [x1j, y1j, z1j] в заданной прямоугольной системе координат OXYZ. Оценки пространственных координат ВС x1j = [xlj, ylj, zlj] через БУ 7 поступают на БОИ 8. ПРМ ДИП 6 принимает дополнительную информационную посылку Vi = [ti0, x0] и фиксирует момент времени ti1 ее приема. Величины ti0, x0 и ti1 через БУ 7 поступают на БОИ 8. БОИ 8 обрабатывает поступающую от НАП 5 и ПРМ ДИП 6 информацию и формирует решение о соответствии или несоответствии достоверности информации, принимаемой НАП 5 от спутников j-й ГНСС, заданным требованиям, в соответствии с выражениями (2) - (4).
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ контроля достоверности информации, принимаемой НАП ВС, сущность которого заключается в том, что решение о соответствии или несоответствии достоверности принимаемой НАП ВС информации заданным требованиям формируется на основе сравнения оценок расстояний между ВС и ЛККС, определяемых в одном случае по разнице между моментами приема и передачи дополнительной информационной посылки, передаваемой с ЛККС на борт ВС, а во втором случае по пространственным координатам ВС и ЛККС, при этом используются пространственные координаты ЛККС, переданные в дополнительной информационной посылке и оценки пространственных координат ВС, сформированные по содержащейся в спутниковых сигналах информации, достоверность которой контролируется.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что если решение о соответствии или несоответствии достоверности принимаемой НАП ВС информации заданным требованиям формировать на основе сравнения оценок расстояний между ВС и ЛККС, определяемых в одном случае по разнице между моментами приема и передачи дополнительной информационной посылки, передаваемой с ЛККС на борт ВС, а во втором случае по пространственным координатам ВС и ЛККС, при этом использовать пространственные координаты ЛККС, переданные в дополнительной информационной посылке, и оценки пространственных координат ВС, сформированные по содержащейся в спутниковых сигналах информации, достоверность которой контролируется, то это приведет к повышению вероятности правильного контроля достоверности информации, принимаемой НАП ВС.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств контроля целостности навигационного поля глобальных навигационных спутниковых систем в части, касающейся контроля достоверности информации, принимаемой навигационной аппаратурой потребителя (НАП) воздушного судна (ВС). Техническим результатом изобретения является повышение вероятности правильного контроля достоверности информации, принимаемой НАП ВС. Сущность изобретения заключается в том, что решение о соответствии или несоответствии достоверности принимаемой НАП ВС информации заданным требованиям формируется на основе сравнения оценок расстояний между ВС и локальной контрольно-корректирующей станцией (ЛККС), определяемых в одном случае по разнице между моментами приема и передачи дополнительной информационной посылки, передаваемой с ЛККС на борт ВС, а во втором случае по пространственным координатам ВС и ЛККС. При этом используются пространственные координаты ЛККС, переданные в дополнительной информационной посылке и оценке пространственных координат ВС, сформированным по содержащейся в спутниковых сигналах информации, достоверность которой контролируется. Это позволяет выявлять факты несоответствия достоверности информации заданным требованиям в точке ее приема НАП ВС даже при условии соответствия достоверности данной информации заданным требованиям в точке ее приема НАП ЛККС. 1 ил.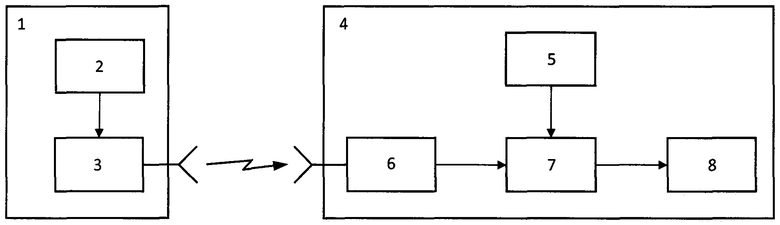
Способ контроля достоверности информации, принимаемой навигационной аппаратурой потребителя (НАП) воздушного судна (ВС), основанный на использовании наземной стационарной локальной контрольно-корректирующей станции (ЛККС), имеющей заранее точно определенные координаты своей дислокации в заданной прямоугольной системе координат OXYZ, для передачи информации по радиоканалу, отличающийся тем, что на стороне ЛККС определяют моменты времени передачи дополнительных информационных посылок, формируют и передают по радиоканалу на ВС, взаимодействующее с ЛККС, в определенные моменты времени дополнительные информационные посылки, содержащие момент времени передачи данной посылки и пространственные координаты ЛККС в заданной прямоугольной системе координат OXYZ, на борту ВС, взаимодействующего с ЛККС, формируют оценки собственных пространственных координат в заданной прямоугольной системе координат OXYZ с использованием НАП ВС каждой j-й глобальной навигационной спутниковой системы (ГНСС), где  J - число действующих ГНСС, принимают дополнительную информационную посылку и фиксируют момент времени ее приема, определяют первую оценку расстояния R1 между ВС и ЛККС по разнице между моментами приема и передачи дополнительной информационной посылки, определяют для каждого j вторую оценку расстояния R2j между ВС и ЛККС по пространственным координатам ВС и ЛККС, при этом используют пространственные координаты ЛККС, переданные в дополнительной информационной посылке, и j-е оценки пространственных координат ВС, каждая из которых сформирована с использованием содержащейся в спутниковых сигналах j-й ГНСС информации, сравнивают для каждого j модуль разности оценок расстояний R1 и R2j с заданным пороговым значением h, если j-й модуль разности оценок расстояний R1 и R2j превышает заданное пороговое значение h, то формируют решение о том, что достоверность информации, принимаемой НАП ВС от спутников j-й ГНСС, не соответствует заданным требованиям, в противном случае формируют решение о том, что достоверность информации, принимаемой НАП ВС от спутников j-й ГНСС, соответствует заданным требованиям.
J - число действующих ГНСС, принимают дополнительную информационную посылку и фиксируют момент времени ее приема, определяют первую оценку расстояния R1 между ВС и ЛККС по разнице между моментами приема и передачи дополнительной информационной посылки, определяют для каждого j вторую оценку расстояния R2j между ВС и ЛККС по пространственным координатам ВС и ЛККС, при этом используют пространственные координаты ЛККС, переданные в дополнительной информационной посылке, и j-е оценки пространственных координат ВС, каждая из которых сформирована с использованием содержащейся в спутниковых сигналах j-й ГНСС информации, сравнивают для каждого j модуль разности оценок расстояний R1 и R2j с заданным пороговым значением h, если j-й модуль разности оценок расстояний R1 и R2j превышает заданное пороговое значение h, то формируют решение о том, что достоверность информации, принимаемой НАП ВС от спутников j-й ГНСС, не соответствует заданным требованиям, в противном случае формируют решение о том, что достоверность информации, принимаемой НАП ВС от спутников j-й ГНСС, соответствует заданным требованиям.
| СПОСОБ КОНТРОЛЯ ДОСТОВЕРНОСТИ ДАННЫХ СИСТЕМЫ АВТОМАТИЧЕСКОГО ЗАВИСИМОГО НАБЛЮДЕНИЯ | 2017 |
|
RU2667494C1 |
| СПОСОБ ПОВЫШЕНИЯ ЦЕЛОСТНОСТИ ИСПОЛЬЗУЕМЫХ СИГНАЛОВ НАВИГАЦИОННЫХ СПУТНИКОВ С ПОМОЩЬЮ ЛОКАЛЬНОЙ КОНТРОЛЬНО-КОРРЕКТИРУЮЩЕЙ СТАНЦИИ (ЛККС) С УЧЕТОМ ВЛИЯНИЯ АНОМАЛЬНОЙ ИОНОСФЕРЫ | 2013 |
|
RU2542326C1 |
| СПОСОБ КОНТРОЛЯ ДОСТОВЕРНОСТИ И УСТРОЙСТВО ОБЪЕДИНЕНИЯ/КОНСОЛИДАЦИИ С МНОЖЕСТВОМ МОДУЛЕЙ ОБРАБОТКИ | 2014 |
|
RU2634693C2 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2510518C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО СИГНАЛАМ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2001 |
|
RU2215299C2 |
| CN 104483678 A, 01.04.2015 | |||
| CN 101419275 A, 29.04.2009 | |||
| СПОСОБ РЕЗКИ АРМИРОВАННОГО ВОЛОКНАМИ КОМПОЗИЦИОННОГО МАТЕРИАЛА | 2016 |
|
RU2693232C1 |
| US 9423501 B2, 23.08.2016. | |||

