Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств определения пространственных координат (ПК) воздушного судна (ВС).
Известен способ определения ПК ВС (см., например, патент на изобретение №2804419 от 29.09.2023 г.), заключающийся в том, что на стороне наземной стационарной локальной контрольно-корректирующей станции (ЛККС), имеющей заранее точно определенные ПК х0 своей дислокации в заданной прямоугольной системе координат (СК) OXYZ с использованием установленного интервала между моментами времени (MB) передачи дополнительных информационных посылок (ДИП) и заданного первого MB передачи ДИП, определяют очередные MB t0i передачи ДИП, формируют и передают по радиоканалу в моменты t0i ДИП Vi=[t0i,x0], содержащие значения t0i и х0, на борту ВС, взаимодействующего с ЛККС, формируют значения хИНС собственных ПК ВС в СК OXYZ с помощью инерциальной навигационной системы (ИНС), формируют значения хНАП собственных ПК ВС в СК OXYZ с помощью навигационной аппаратуры потребителя (НАП), с использованием заданного начального контрольного момента времени (КМВ) и заданного интервала ΔtК между КМВ определяют очередной КМВ tKl, принимают очередную ДИП Vm, выделяют из нее значения t0m, х0 и фиксируют MB tПр.m ее приема, где  М - число принятых ДИП на протяжении полета ВС, с использованием момента tKl и момента tПр.l времени приема крайней ДИП проверяют наличие принятой ДИП в интервале ΔtК посредством определения значения ωl признака наличия ДИП, где ωl=[0,1], ωl=1 - в интервале ΔtК относительно момента tKl имеется принятая ДИП, ωl=0 - в интервале ΔtК относительно момента tKl отсутствует принятая ДИП, при этом если разность моментов tKl и tПр.l превышает интервал ΔtК, то определяют значение ωl=0, иначе определяют значение ωl=1, если на этапе проверки наличия принятой ДИП в заданном временном интервале определено значение ωl=1, то осуществляют контроль работоспособности НАП с использованием ЛККС посредством определения значения q1l первого признака работоспособности НАП, а также определяют значения xИНСЛКKCl ПК ВС на момент tKl на основе комплексной обработки информации (КОИ) от ИНС и ЛККС, где q1l=[0,1], q1l=0 - НАП неработоспособна на момент tKl, q1l=1 - НАП работоспособна на момент tKl, при этом с использованием MB передачи и приема крайней ДИП определяют первую оценку R1l расстояния между ВС и ЛККС на момент tKl, с использованием значений хНАПl и х0 определяют вторую оценку R2l расстояния между ВС и ЛККС на момент tKl, где хНАПl - сформированные НАП значения ПК ВС в СК OXYZ на момент tKl, если модуль разности оценок R1l и R2l превышает заданный порог hЛККС, то определяют значение q1l=0, иначе определяют значение q1l=1, значения xИНСЛКKCl определяют с использованием значений R1l, хИНCl, и х0, где хИНCl - сформированные ИНС значения ПК ВС в СК OXYZ на момент tKl, если на этапе контроля работоспособности НАП с использованием ЛККС определено значение q1l=0, то принимают значения xИНСЛКKCl в качестве итоговых значений xBCl ПК ВС на момент tKl, если на этапе контроля работоспособности НАП с использованием ЛККС определено значение q1l=1, то итоговые значения xBCl ПК ВС определяют на основе КОИ от ИНС, ЛККС и НАП с использованием значений xИНСЛКKCl, хНАПl, DИНС, DЛККС и DНАП, где DИНС - заданная дисперсия ошибки определения ПК с использованием ИНС, DЛККС - заданная дисперсия ошибки определения оценки R1l, DНАП - заданная дисперсия ошибки определения ПК с использованием НАП, если на этапе проверки наличия принятой ДИП в заданном ВИ определено значение ωl=0, то контроль работоспособности НАП осуществляют с использованием ИНС посредством определения значения q2l второго признака работоспособности НАП, где q2l=[0,1], q2l=0 - НАП неработоспособна на момент tKl, q2l=1 - НАП работоспособна на момент tKl, при этом, если модули разностей значений хИНCl и хНАПl по всем осям СК OXYZ не превышают заданной порога hИНСНАП, то определяют значение q2l=1, иначе определяют значение q2l=0, если на этапе контроля работоспособности НАП с использованием ИНС определено значение q2l=0, то принимают значения хИНCl в качестве итоговых значений xBCl ПК ВС, если на этапе контроля работоспособности НАП с использованием ИНС определено значение q2l=1, то итоговые значения xBCl ПК ВС определяют на основе КОИ от НАП и ИНС с использованием значений хИНCl, хНАПl, DИНС и DНАП.
М - число принятых ДИП на протяжении полета ВС, с использованием момента tKl и момента tПр.l времени приема крайней ДИП проверяют наличие принятой ДИП в интервале ΔtК посредством определения значения ωl признака наличия ДИП, где ωl=[0,1], ωl=1 - в интервале ΔtК относительно момента tKl имеется принятая ДИП, ωl=0 - в интервале ΔtК относительно момента tKl отсутствует принятая ДИП, при этом если разность моментов tKl и tПр.l превышает интервал ΔtК, то определяют значение ωl=0, иначе определяют значение ωl=1, если на этапе проверки наличия принятой ДИП в заданном временном интервале определено значение ωl=1, то осуществляют контроль работоспособности НАП с использованием ЛККС посредством определения значения q1l первого признака работоспособности НАП, а также определяют значения xИНСЛКKCl ПК ВС на момент tKl на основе комплексной обработки информации (КОИ) от ИНС и ЛККС, где q1l=[0,1], q1l=0 - НАП неработоспособна на момент tKl, q1l=1 - НАП работоспособна на момент tKl, при этом с использованием MB передачи и приема крайней ДИП определяют первую оценку R1l расстояния между ВС и ЛККС на момент tKl, с использованием значений хНАПl и х0 определяют вторую оценку R2l расстояния между ВС и ЛККС на момент tKl, где хНАПl - сформированные НАП значения ПК ВС в СК OXYZ на момент tKl, если модуль разности оценок R1l и R2l превышает заданный порог hЛККС, то определяют значение q1l=0, иначе определяют значение q1l=1, значения xИНСЛКKCl определяют с использованием значений R1l, хИНCl, и х0, где хИНCl - сформированные ИНС значения ПК ВС в СК OXYZ на момент tKl, если на этапе контроля работоспособности НАП с использованием ЛККС определено значение q1l=0, то принимают значения xИНСЛКKCl в качестве итоговых значений xBCl ПК ВС на момент tKl, если на этапе контроля работоспособности НАП с использованием ЛККС определено значение q1l=1, то итоговые значения xBCl ПК ВС определяют на основе КОИ от ИНС, ЛККС и НАП с использованием значений xИНСЛКKCl, хНАПl, DИНС, DЛККС и DНАП, где DИНС - заданная дисперсия ошибки определения ПК с использованием ИНС, DЛККС - заданная дисперсия ошибки определения оценки R1l, DНАП - заданная дисперсия ошибки определения ПК с использованием НАП, если на этапе проверки наличия принятой ДИП в заданном ВИ определено значение ωl=0, то контроль работоспособности НАП осуществляют с использованием ИНС посредством определения значения q2l второго признака работоспособности НАП, где q2l=[0,1], q2l=0 - НАП неработоспособна на момент tKl, q2l=1 - НАП работоспособна на момент tKl, при этом, если модули разностей значений хИНCl и хНАПl по всем осям СК OXYZ не превышают заданной порога hИНСНАП, то определяют значение q2l=1, иначе определяют значение q2l=0, если на этапе контроля работоспособности НАП с использованием ИНС определено значение q2l=0, то принимают значения хИНCl в качестве итоговых значений xBCl ПК ВС, если на этапе контроля работоспособности НАП с использованием ИНС определено значение q2l=1, то итоговые значения xBCl ПК ВС определяют на основе КОИ от НАП и ИНС с использованием значений хИНCl, хНАПl, DИНС и DНАП.
Одним из недостатков данного способа является снижение точности определяемых ПК ВС с увеличением длительности полета ВС. Это объясняется следующим. С течением времени в ИНС накапливается ошибка измерений ПК, которая может приводить к ложному решению о неработоспособности НАП на этапе определения второго признака работоспособности НАП. Каждое ложное решение о неработоспособности НАП будет являться причиной исключения наиболее точных измерений, сформированных работоспособной НАП, из КОИ при определении итоговых значений ПК ВС и, как следствие, приведет к снижению их точности в целом.
Техническим результатом изобретения повышение точности определяемых ПК ВС.
Указанный результат достигается тем, что в известном способе значение q2l второго признака работоспособности НАП определяют в результате выявления соответствия или несоответствия проверочного и контрольного отклонений местоположения ВС, оцениваемых с использованием измерений, формируемых НАП и ИНС соответственно в текущий и предыдущий КМВ на протяжении полета ВС, при этом оценивают проверочное отклонение dxНАПl местоположения ВС, определенного с использованием НАП в текущий КМВ tKl, относительно местоположения ВС, определенного с использованием НАП в предыдущий КМВ tKl, оценивают контрольное отклонение dxИНСl местоположения ВС, определенного с использованием ИНС в текущий КМВ tKl, относительно местоположения ВС, определенного с использованием ИНС в предыдущий КМВ tK(l-1), определяют абсолютную невязку ΔdНАПИНCl между величинами dxНАПl и dxИНCl, сравнивают абсолютную невязку ΔdНАПИНCl с заданным допустимым значением Δdдоп., если абсолютная невязка ΔdxНАПИНCl не превышает заданного допустимого значения Δd, то определяют значение q2l=1, иначе определяют значение q2l=0.
Сущность изобретения заключается в том, что итоговые значения ПК ВС формируются в результате комплексной обработки информации, поступающей от ЛККС, ИНС и НАП с учетом двухвариантного контроля работоспособности НАП, реализуемого в первом варианте с использованием ЛККС посредством определения значения первого признака работоспособности НАП, а во втором варианте - с использованием ИНС посредством определения значения второго признака работоспособности НАП, при этом значение второго признака работоспособности НАП определяется в результате выявления соответствия или несоответствия проверочного и контрольного отклонений местоположения ВС, оцениваемых с использованием измерений, формируемых НАП и ИНС соответственно в текущий и предыдущий КМВ на протяжении полета ВС. Это позволяет снизить зависимость значения второго признака работоспособности НАП от накопленной ошибки измерений ПК в ИНС и приводит к повышению достоверности его определения. Повышение достоверности определения второго признака работоспособности НАП, в свою очередь, позволяет снизить число случаев исключения достоверных и наиболее точных измерений работоспособной НАП из КОИ при определении итоговых значений ПК ВС и, как следствие, приводит к повышению их точности в целом. Снижение зависимости второго признака работоспособности НАП от влияния накопленной ошибки измерений ПК в ИНС объясняется тем, что определяемое с использованием ИНС значение контрольного отклонения местоположения ВС, в отличие от накопленной ошибки измерений ПК в ИНС, зависит только от интервала времени между текущим и предыдущим КМВ и не зависит от длительности полета ВС.
Данный способ включает в себя следующие этапы:
1 На стороне наземной стационарной ЛККС, имеющей заранее точно определенные координаты х0=[x0,y0,z0] своей дислокации в заданной прямоугольной СК OXYZ:
1.1 Определение очередных MB t0i передачи ДИП в соответствии с выражением

где tl - заданный первый MB передачи ДИП;  I - число передаваемых ДИП на протяжении полета ВС; Δt - установленный ВИ между MB передачи ДИП.
I - число передаваемых ДИП на протяжении полета ВС; Δt - установленный ВИ между MB передачи ДИП.
1.2 Формирование и передача по радиоканалу в MB t0j ДИП Vi=[t0i,x0], содержащей MB t0i передачи данной посылки и ПК ЛККС х0 в заданной прямоугольной СК OXYZ.
2 На борту ВС, взаимодействующего с ЛККС:
2.1 Формирование значений хИНС=[хИНС,yИНС,zИНС] собственных ПК ВС в заданной прямоугольной СК OXYZ с помощью ИНС.
2.2 Формирование значений [хНАП,yНАП,zНАП] собственных ПК ВС в заданной прямоугольной СК OXYZ с помощью НАП.
2.3 Определение очередного КМВ tKl в соответствии с выражением

где tK0 - заданный начальный КМВ;  L - число КМВ на протяжении полета ВС; ΔtК - заданный интервал между КМВ.
L - число КМВ на протяжении полета ВС; ΔtК - заданный интервал между КМВ.
2.4 Прием очередной ДИП Vm=[t0m,x0], выделение значений t0m, х0 и фиксация MB tПр.m ее приема, где  М - число принятых ДИП на протяжении полета ВС, М≤I.
М - число принятых ДИП на протяжении полета ВС, М≤I.
Примечание: условие М≤I указывает на то, что не все переданные ДИП могут быть приняты на борту ВС. В идеальном случае, когда все переданные ДИП принимаются на борту ВС справедливы равенства: m=i, М=I.
2.5 Определение значения ωl признака наличия ДИП (проверка наличия принятой ДИП в заданном интервале ΔtК относительно очередного КМВ tKl) в соответствии с выражением

где ωl=[0,1], ωl=1 - в заданном интервале ΔtК относительно очередного КМВ tKl имеется принятая ДИП (формируется решение о наличии принятой ДИП в заданном временном интервале), ωl=0 - в заданном интервале ΔtК относительно очередного КМВ tKl отсутствует принятая ДИП (формируется решение об отсутствии принятой ДИП в заданном временном интервале), tПр.l - MB приема крайней ДИП (под крайней ДИП, понимается ДИП ближайшая по времени приема к очередному КМВ tKl).
2.6 Если в пункте 2.5 определено значение ωl=0, то переход к пункту 2.13, иначе выполнение первого варианта контроля работоспособности НАП с использованием ЛККС в соответствии с пунктами 2.7-2.9 и определение значений xИНСЛКKCl=[xИНСЛКKCl,yИНСЛКKCl,zИНСЛКKCl] ПК ВС на КМВ tKl на основе КОИ от ИНС и ЛККС в соответствии с пунктом 2.10.
2.7 Определение первой оценки R1l расстояния между ВС и ЛККС на КМВ tKl в соответствии с выражением

где С=3⋅108 м/с - скорость распространения радиоволны, t0l - MB передачи крайней ДИП.
2.8 Определение второй оценки R2l расстояния между ВС и ЛККС на КМВ tKl в соответствии с выражением

где хНАПl=[хНАПl,yНАПl,zНАПl] - значения собственных ПК ВС в заданной прямоугольной СК OXYZ, сформированные НАП на КМВ tKl.
2.9 Определение значения ql1 первого признака работоспособности НАП на КМВ tKl с использованием ЛККС, в соответствии с выражением

где q1l=[0,1], q1l=0 - НАП неработоспособна на КМВ tKl; q1l=1 - НАП работоспособна на КМВ tKl, hЛККС - заданный порог (заданная допустимая невязка оценок расстояний между ВС и ЛККС).
Таким образом, если в результате проверки наличия принятой ДИП в заданном временном интервале сформировано решение о наличии принятой ДИП в заданном временном интервале (если в пункте 2.5 определено значение ωl=1), то реализуется первый вариант контроля работоспособности НАП с использованием ЛККС.
2.10 Определение значений xИНСЛКKCl=[xИНСЛКKCl,yИНСЛКKCl,zИНСЛКKCl] ПК ВС на КМВ tKl на основе КОИ от ИНС и ЛККС, в соответствии с пунктами 2.10.1-2.10.2:
2.10.1 Определение координат точки Fl пересечения сферы Sl=[Oo,R1l] и луча Ll=[Oo,Al] (Sl - сфера с центром в точке Оo и радиусом R1l; Оo - точка, координаты которой совпадают с координатами ЛККС; Ll - луч с началом в точке Оo, проходящий через точку Аl, координаты которой совпадают со значениями ПК ВС, сформированными ИНС на КМВ tKl) в соответствии с нижеприведенными процедурами 2.10.1.1-2.10.1.6:
2.10.1.1 Определение расстояния между точками Оo и А, в соответствии с выражением

2.10.1.2 Определение координат xF1l=[xF1l,yF1l,zF1l] точки F1l (F1l - первая точка пересечения сферы Sl=[Оo,R1l] и прямой Рl=[Оo,Al], где Рl - прямая, проходящая через точку Оo и точку Аl) в соответствии с выражениями:
2.10.1.3 Определение координат xF2l=[xF2l,yF2l,zF2l] точки F2l (F2l - вторая точка пересечения сферы Sl=[Оo,R1l] и прямой Рl=[Оo,Al]) в соответствии с выражениями:
2.10.1.4 Определение расстояния R(AlF1l) между точками Аl и F1l в соответствии с выражением

2.10.1.5 Определение расстояния R(AlF1l) между точками Аl и F2l в соответствии с выражением

2.10.1.6 Определение координат хFl точки Fl (координаты точки Fl определяются, как координаты точки F1l или точки F2l, удовлетворяющей условию минимума расстояния до точки Аl, так как именно ближайшая к точке Аl точка F1l или точка F2l является точкой Fl пересечения характерной сферы Sl=[Oo,R1l] и характерного луча Ll=[Oo,Al) в соответствии с выражением

2.10.2 Принятие координат хFl точки Fl в качестве значений xИНСЛКKCl=[xИНСЛКKCl,yИНСЛКKCl,zИНСЛКKCl] ПК ВС, определенных на основе КОИ от ИНС и ЛККС, на КМВ tKl в соответствии с выражением

2.11 Если в пункте 2.9 определено значение q1l=1, то переход к пункту 2.12, иначе принятие значений xИНСЛКKCl в качестве итоговых значений xBCl=[xBCl,yBCl,zBCl] ПК ВС на КМВ tKl в соответствии с выражением

Таким образом, если на этапе реализации первого варианта контроля работоспособности НАП с использованием ЛККС сформировано решение о том, что НАП неработоспособна (если в пункте 2.9 определено значение q1l=0), то итоговые значения ПК ВС определяются на основе КОИ от ИНС и ЛККС.
2.12 Если в пункте 2.9 определено значение q1l=1, то определение итоговых значений xBCl=[xBCl,yBCl,zBCl] ПК ВС на КМВ tKl на основе КОИ от ИНС, ЖКС и НАП в соответствии с выражениями:
где DНАП - заданная дисперсия ошибки определения ПК с использованием НАП; DИНС - заданная дисперсия ошибки определения ПК с использованием ИНС; DЛККС - заданная дисперсия ошибки определения оценки R1l.
Таким образом, если на этапе реализации первого варианта контроля работоспособности НАП с использованием ЛККС сформировано решение о том, что НАП работоспособна (если в пункте 2.9 определено значение q1l=1), то итоговые значения ПК ВС определяются на основе КОИ от ИНС, ЛККС и НАП.
2.13 Если в пункте 2.5 определено значение ωl=0, то выполнение второго варианта контроля работоспособности НАП с использованием ИНС (определение значения ql2 второго признака работоспособности НАП) в соответствии с пунктами 2.13.1-2.13.4.
2.13.1 Оценка проверочного отклонения dxНАПl местоположения ВС, определенного с использованием НАП в текущий КМВ tKl, относительно местоположения ВС, определенного с использованием НАП в предыдущий КМВ tKl, в соответствии с выражением

2.13.2 Оценка контрольного отклонения dxИНCl, местоположения ВС, определенного с использованием ИНС в текущий КМВ tKl, относительно местоположения ВС, определенного с использованием ИНС в предыдущий КМВ tK(l-1) в соответствии с выражением

2.13.3. Определяют абсолютную невязку ΔdНАПИНCl между величинами dxНАПl и dxИНCl в соответствии с выражением

2.13.4 Определение значения ql2 второго признака работоспособности НАП в соответствии с выражением

где q2l=[0,1], q2l=0 - НАП неработоспособна на контрольный момент времени tKl; q2l=1 - НАП работоспособна на контрольный момент времени tKl, Δdдоп. - заданное допустимое значение невязки между величинами dxНАПl и dxИНCl.
В соответствии с пунктом 2.13.4 осуществляется сравнение абсолютной невязки ΔdНАПИНCl с заданным допустимым значением Δdдоп., если абсолютная невязка ΔdxНАПИНCl не превышает заданного допустимого значения Δd, то определяется значение q2l=1, иначе определяется значение q2l=0.
Таким образом, если на этапе проверки наличия принятой ДИП в заданном временном интервале сформировано решение об отсутствии принятой ДИП в заданном временном интервале (если в пункте 2.5 определено значение ωl=0), то реализуется второй вариант контроля работоспособности НАП с использованием ИНС, при этом значение q2l второго признака работоспособности НАП определяется в результате выявления соответствия или несоответствия проверочного и контрольного отклонений местоположения ВС, оцениваемых с использованием измерений, формируемых НАП и ИНС соответственно в текущий и предыдущий КМВ на протяжении полета ВС.
2.14 Если в пункте 2.13 определено значение ql2=1, то переход к пункту 2.15, иначе принятие значений хИНCl в качестве итоговых значений xBCl=[xBCl,yBCl,zBCl] ПК ВС на КМВ tKl в соответствии с выражением

Таким образом, если на этапе реализации второго варианта контроля работоспособности НАП с использованием ИНС сформировано решение о том, что НАП неработоспособна (если в пункте 2.13 определено значение ql2=0), то в качестве итоговых значений пространственных координат ВС принимаются значения пространственных координат ВС, сформированные ИНС.
2.15 Если в пункте 2.13 определено значение ql2=1, то определение итоговых значений xBCl=[xBCl,yBCl,zBCl] пространственных координат ВС на основе комплексной обработки информации от НАП и ИНС в соответствии с выражениями:
Таким образом, если на этапе реализации второго варианта контроля работоспособности НАП с использованием ИНС сформировано решение о том, что НАП работоспособна (если в пункте 2.13 определено значение ql2=1), то итоговые значения ПК ВС определяются на основе КОИ от НАП и ИНС.
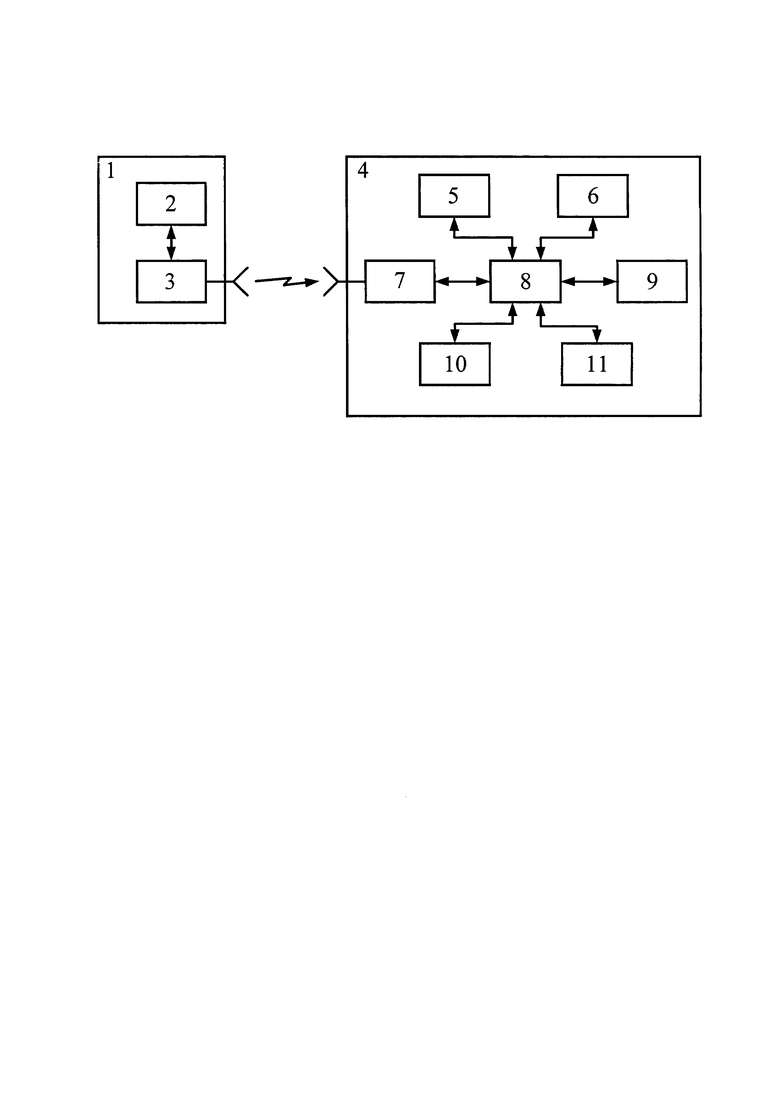
Данный способ может быть реализован, например, с помощью комплекса устройств, структурная схема которого приведена на чертеже, где обозначено: 1 - ЛККС; 2 - блок управления (БУ); 3 - аппаратура формирования и передачи дополнительной информационной посылки (АФП ДИП); 4 - ВС, взаимодействующее с ЛККС 1; 5 - первый блок контроля работоспособности (ПБКР) НАП; 6 - второй блок контроля работоспособности (ВБКР) НАП; 7 - приемник дополнительной информационной посылки (ПРМ ДИП); 7 - блок управления, согласования и обработки информации (БУСОИ); 8 - блок управления и обработки информации (БУОИ); 9 - ИНС; 10 - НАП; 11 - блок оценки отклонений местоположения (БООМ).
БУ 2 предназначен для определения моментов времени ti0 передачи ДИП в соответствии с пунктом 1.1 и управления АФП ДИП 3 на стороне ЛККС 1. АФП ДИП 3 предназначена для формирования и передачи в определенные моменты времени ti0 ДИП Vi. ПБКР НАП 5 предназначен для реализации первого варианта контроля работоспособности НАП 10 с использованием ЛККС. ВБКР НАП 6 предназначен для реализации второго варианта контроля работоспособности НАП 10 с использованием ИНС.ПРМ ДИП 7 предназначен для приема очередной ДИП Vi, выделения из нее значений t0m, х0 и фиксации момента времени tПр.m ее приема. БУСОИ 8 предназначен для управления элементами комплекса на борту ВС 4, согласования их между собой и обработки информации. ИНС 9 предназначена для формирования значений хИНCl пространственных координат ВС 4 в СК OXYZ. НАП 10 предназначена для формирования значений хНАПl пространственных координат ВС 4 в СК OXYZ на основе обработки принятых спутниковых сигналов от ГНСС. БООМ 11 предназначен для оценки проверочного и контрольного отклонений местоположения ВС dxНАПl и dxИНCl соответственно.
Комплекс работает следующим образом. БУ 2 определяет MB ti0 передачи ДИП в соответствии с пунктом 1.1 и управляет АФП ДИП 3 на стороне ЛККС 1. АФП ДИП 3 формирует ДИП Vi и под управлением БУ 2 передает их в определенные MB ti0. БУСОИ 8 управляет элементами комплекса на борту ВС 4 и согласует их между собой. ИНС 9 формирует значения хИНCl собственных ПК ВС 4 в СК OXYZ. Значения хИНCl с выхода ИНС 9 поступают на БУСОИ 8, а также через БУСОИ 8 на БООМ 11. НАП 10 формирует значения хНАПl собственных ПК ВС 4 в СК OXYZ на основе обработки принятых спутниковых сигналов от ГНСС. Значения хНАПl с выхода НАП 10 поступают на БУСОИ 8, а также через БУСОИ 8 на ПБКР НАП 5 и БООМ 11. БУСОИ 8 определяет очередной КМВ tKl в соответствии с пунктом 2.3. ПРМ ДИП 7 принимает очередную ДИП Vi, выделяет из нее значения t0m, х0 и фиксирует MB tПр.m ее приема. Значения t0m, х0 и tПр.m с выхода ПРМ ДИП 7 поступают на БУСОИ 8. БУСОИ 8 определяет значение ωl признака наличия ДИП в соответствии с пунктом 2.5. Если в БУСОИ 8 определено значение ωl=1, то данное значение поступает с выхода БУСОИ 8 на ПБКР НАП 5, а также в этом случае БУСОИ 8 определяет значения xИНСЛКKCl ПК ВС 4 на КМВ tKl на основе КОИ от ИНС и ЛККС в соответствии с пунктом 2.10. Если в БУСОИ 8 определено значение ωl=0, то данное значение поступает с выхода БУСОИ 8 на БООМ 11 и ВБКР НАП 6. При поступлении значения ωl=1, ПБКР НАП 5 реализует первый вариант контроля работоспособности НАП 10 с использованием ЛККС посредством определения значения ql1 первого признака работоспособности НАП 10 в соответствии с пунктами 2.7-2.9. Определенное значение q1l с выхода ПБКР НАП 5 поступает на БУСОИ 8. При поступлении значения ωl=0, БООМ 11 оценивает проверочное и контрольное отклонения местоположения dxНАПl и dxИНCl в соответствии с пунктами 2.13.1 и 2.13.2 соответственно. Значения dxНАПl и dxИНCl с выхода БООМ 11 поступают через БУСОИ 8 на вход ВБКР НАП 6. При поступлении значения ωl=0, dxНАПl и dxИНCl, ВБКР НАП 6 реализует второй вариант контроля работоспособности НАП 10 с использованием ИНС, при этом сначала в данном блоке определяется абсолютная невязка ΔdНАПИНCl между величинами dxНАПl и dxИНCl в соответствии с пунктами 2.13.3, а затем значение ql2 второго признака работоспособности НАП 10 в соответствии с пунктом 2.13.4. Определенное значение q2l с выхода ВБКР НАП 6 поступает на БУСОИ 8. Если с выхода ПБКР НАП 5 на вход БУСОИ 8 поступает значение q1l=0, то БУСОИ 8 определяет итоговые значения xBCl ПК ВС 4 принимая в качестве них значения xИНСЛКKCl в соответствии с пунктом 2.11. Если с выхода ПБКР НАП 5 на вход БУСОИ 8 поступает значение q1l=1, то БУСОИ 8 определяет итоговые значения xBCl ПК ВС 4 на КМВ tKl на основе КОИ от ИНС, ЛККС и НАП в соответствии с пунктом 2.12. Если с выхода ВБКР НАП 6 на вход БУСОИ 8 поступает значение ql2=0, то БУСОИ 8 определяет итоговые значения xBCl ПК ВС 4 на КМВ tKl путем принятия в качестве них значений хИНCl в соответствии с пунктом 2.14. Если с выхода ВБКР НАП 6 на вход БУСОИ 8 поступает значение ql2=1, то БУСОИ 8 определяет итоговые значения xBCl ПК ВС 4 на КМВ tKl на основе КОИ от НАП и ИНС в соответствии с пунктом 2.15.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ определения ПК ВС, сущность которого заключается в том, что итоговые значения ПК ВС формируются в результате КОИ, поступающей от ЛККС, ИНС и НАП с учетом двухвариантного контроля работоспособности НАП, реализуемого в первом варианте с использованием ЛККС посредством определения значения первого признака работоспособности НАП, а во втором варианте с использованием ИНС посредством определения значения второго признака работоспособности НАП, при этом значение второго признака работоспособности НАП определяется в результате выявления соответствия или несоответствия проверочного и контрольного отклонений местоположения ВС, оцениваемых с использованием измерений, формируемых НАП и ИНС соответственно в текущий и предыдущий КМВ на протяжении полета ВС.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что если итоговые значения ПК ВС формировать в результате КОИ, поступающей от ЛККС, ИНС и НАП с учетом двухвариантного контроля работоспособности НАП, реализуемого в первом варианте с использованием ЛККС посредством определения значения первого признака работоспособности НАП, а во втором варианте с использованием ИНС посредством определения значения второго признака работоспособности НАП, при этом значение второго признака работоспособности НАП определять в результате выявления соответствия или несоответствия проверочного и контрольного отклонений местоположения ВС, оцениваемых с использованием измерений, формируемых НАП и ИНС соответственно в текущий и предыдущий КМВ на протяжении полета ВС, то это приведет к повышению точности определяемых пространственных координат ВС.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств определения пространственных координат (ПК) воздушного судна (ВС). Техническим результатом изобретения является повышение точности определяемых ПК ВС. В заявленном способе итоговые значения ПК ВС формируются в результате комплексной обработки информации, поступающей от локальной контрольно-корректирующей станции (ЛККС), инерциальной навигационной системы (ИНС) и навигационной аппаратуры потребителя (НАП) с учетом двухвариантного контроля работоспособности НАП, реализуемого в первом варианте с использованием ЛККС посредством определения значения первого признака работоспособности НАП, а во втором варианте - с использованием ИНС посредством определения значения второго признака работоспособности НАП, при этом значение второго признака работоспособности НАП определяется в результате выявления соответствия или несоответствия проверочного и контрольного отклонений местоположения ВС, оцениваемых с использованием измерений, формируемых НАП и ИНС соответственно в текущий и предыдущий контрольные моменты времени на протяжении полета ВС. Это позволяет снизить зависимость значения второго признака работоспособности НАП от накопленной ошибки измерений ПК в ИНС и приводит к повышению достоверности его определения. Повышение достоверности определения второго признака работоспособности НАП, в свою очередь, позволяет снизить число случаев исключения наиболее точных измерений работоспособной НАП из комплексной обработки информации при определении итоговых значений ПК ВС и, как следствие, приводит к повышению их точности в целом. 1 ил.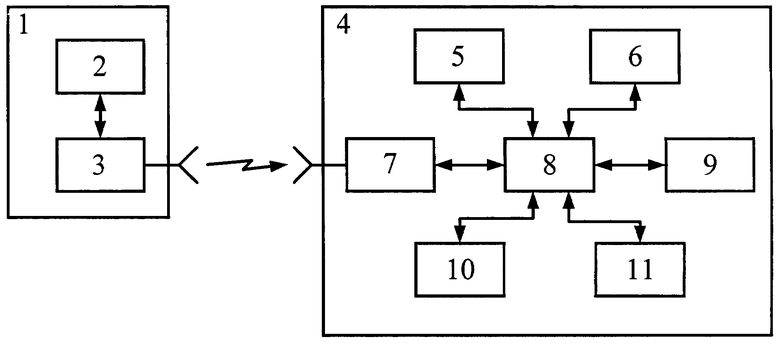
Способ определения пространственных координат воздушного судна (ВС), заключающийся в том, что на стороне наземной стационарной локальной контрольно-корректирующей станции (ЛККС), имеющей заранее точно определенные пространственные координаты х0 своей дислокации в заданной прямоугольной системе координат OXYZ, с использованием установленного временного интервала между моментами времени передачи дополнительных информационных посылок (ДИП) и заданного первого момента времени передачи ДИП определяют моменты времени t0i передачи ДИП, формируют и передают по радиоканалу в определенные моменты t0i ДИП Vi=[t0i,x0], содержащие значения t0i и х0, на борту ВС, взаимодействующего с ЛККС, формируют значения хИНС собственных пространственных координат ВС в системе координат OXYZ с помощью инерциальной навигационной системы (ИНС), формируют значения хНАП собственных пространственных координат ВС в системе координат OXYZ с помощью навигационной аппаратуры потребителя (НАП), с использованием заданного начального контрольного момента времени и заданного временного интервала ΔtК между контрольными моментами времени определяют очередной контрольный момент времени tKl, принимают очередную ДИП Vm, выделяют из нее значения t0m, х0 и фиксируют момент времени tПр.m ее приема, где  М - число принятых ДИП на протяжении полета ВС, с использованием момента tKl и момента tПр.l времени приема крайней ДИП проверяют наличие принятой ДИП в заданном временном интервале ΔtК посредством определения значения ωl признака наличия ДИП, где ωl=[0,1], ωl=1 - в интервале ΔtК относительно момента tKl имеется принятая ДИП, ωl=0 - в интервале ΔtК относительно момента tKl отсутствует принятая ДИП, при этом если разность моментов tKl и tПр.l превышает интервал ΔtК, то определяют значение ωl=0, иначе определяют значение ωl=1, если на этапе проверки наличия принятой ДИП в заданном временном интервале определено значение ωl=1, то реализуют первый вариант контроля работоспособности НАП с использованием ЛККС посредством определения значения q1l первого признака работоспособности НАП, а также определяют значения xИНСЛКKCl пространственных координат ВС на момент tKl на основе комплексной обработки информации от ИНС и ЛККС, где q1l=[0,1], q1l=0 - НАП неработоспособна на момент tKl, q1l=1 - НАП работоспособна на момент tKl, при этом с использованием моментов передачи и приема крайней ДИП определяют первую оценку R1l расстояния между ВС и ЛККС на момент tKl, с использованием значений хНАПl и х0 определяют вторую оценку R2l расстояния между ВС и ЛККС на момент tKl, где хНАПl - сформированные НАП значения пространственных координат ВС в системе координат OXYZ на момент tKl, если модуль разности оценок R1l и R2l превышает заданный порог hЛККС, то определяют значение q1l=0, иначе определяют значение q1l=1, значения xИНСЛКKCl определяют с использованием значений R1l, хИНCl, и х0, где хИНCl - сформированные ИНС значения пространственных координат ВС в системе координат OXYZ на момент tKl, если на этапе реализации первого варианта контроля работоспособности НАП с использованием ЛККС определено значение q1l=0, то принимают значения xИНСЛКKCl в качестве итоговых значений хBCl пространственных координат ВС на момент tKl, если на этапе реализации первого варианта контроля работоспособности НАП с использованием ЛККС определено значение q1l=1, то итоговые значения хBCl пространственных координат ВС определяют на основе комплексной обработки информации от ИНС, ЛККС и НАП с использованием значений xИНСЛКKCl, хНАПl, DИНС, DЛККС и DНАП, где DИНС - заданная дисперсия ошибки определения пространственных координат с использованием ИНС, DЛККС - заданная дисперсия ошибки определения оценки R1l, DНАП - заданная дисперсия ошибки определения пространственных координат с использованием НАП, если на этапе проверки наличия принятой ДИП в заданном временном интервале определено значение ωl=0, то реализуют второй вариант контроля работоспособности НАП с использованием ИНС посредством определения значения q2l второго признака работоспособности НАП, где q2l=[0,1], q2l=0 - НАП неработоспособна на момент tKl, q2l=1 - НАП работоспособна на момент tKl, если на этапе реализации второго варианта контроля работоспособности НАП с использованием ИНС определено значение q2l=0, то принимают значения хИНCl в качестве итоговых значений хBCl пространственных координат ВС, если на этапе реализации второго варианта контроля работоспособности НАП с использованием ИНС определено значение q2l=1, то итоговые значения хBCl пространственных координат ВС определяют на основе комплексной обработки информации от НАП и ИНС с использованием значений хИНCl, хНАПl, DИНС и DНАП, отличающийся тем, что значение q2l второго признака работоспособности НАП определяют в результате выявления соответствия или несоответствия проверочного и контрольного отклонений местоположения ВС, оцениваемых с использованием измерений, формируемых НАП и ИНС соответственно в текущий и предыдущий контрольные моменты времени на протяжении полета ВС, при этом оценивают проверочное отклонение dxНАПl местоположения ВС, определенного с использованием НАП в текущий контрольный момент времени tKl, относительно местоположения ВС, определенного с использованием НАП в предыдущий контрольный момент времени tKl, оценивают контрольное отклонение dхИНCl местоположения ВС, определенного с использованием ИНС в текущий контрольный момент времени tKl, относительно местоположения ВС, определенного с использованием ИНС в предыдущий контрольный момент времени tK(l-1), определяют абсолютную невязку ΔdНАПИНCl между величинами dxНАПl и dxИНCl, сравнивают абсолютную невязку ΔdНАПИНCl с заданным допустимым значением Δdдоп., если абсолютная невязка ΔdxНАПИНCl не превышает заданного допустимого значения Δd, то определяют значение q2l=1, иначе определяют значение q2l=0.
М - число принятых ДИП на протяжении полета ВС, с использованием момента tKl и момента tПр.l времени приема крайней ДИП проверяют наличие принятой ДИП в заданном временном интервале ΔtК посредством определения значения ωl признака наличия ДИП, где ωl=[0,1], ωl=1 - в интервале ΔtК относительно момента tKl имеется принятая ДИП, ωl=0 - в интервале ΔtК относительно момента tKl отсутствует принятая ДИП, при этом если разность моментов tKl и tПр.l превышает интервал ΔtК, то определяют значение ωl=0, иначе определяют значение ωl=1, если на этапе проверки наличия принятой ДИП в заданном временном интервале определено значение ωl=1, то реализуют первый вариант контроля работоспособности НАП с использованием ЛККС посредством определения значения q1l первого признака работоспособности НАП, а также определяют значения xИНСЛКKCl пространственных координат ВС на момент tKl на основе комплексной обработки информации от ИНС и ЛККС, где q1l=[0,1], q1l=0 - НАП неработоспособна на момент tKl, q1l=1 - НАП работоспособна на момент tKl, при этом с использованием моментов передачи и приема крайней ДИП определяют первую оценку R1l расстояния между ВС и ЛККС на момент tKl, с использованием значений хНАПl и х0 определяют вторую оценку R2l расстояния между ВС и ЛККС на момент tKl, где хНАПl - сформированные НАП значения пространственных координат ВС в системе координат OXYZ на момент tKl, если модуль разности оценок R1l и R2l превышает заданный порог hЛККС, то определяют значение q1l=0, иначе определяют значение q1l=1, значения xИНСЛКKCl определяют с использованием значений R1l, хИНCl, и х0, где хИНCl - сформированные ИНС значения пространственных координат ВС в системе координат OXYZ на момент tKl, если на этапе реализации первого варианта контроля работоспособности НАП с использованием ЛККС определено значение q1l=0, то принимают значения xИНСЛКKCl в качестве итоговых значений хBCl пространственных координат ВС на момент tKl, если на этапе реализации первого варианта контроля работоспособности НАП с использованием ЛККС определено значение q1l=1, то итоговые значения хBCl пространственных координат ВС определяют на основе комплексной обработки информации от ИНС, ЛККС и НАП с использованием значений xИНСЛКKCl, хНАПl, DИНС, DЛККС и DНАП, где DИНС - заданная дисперсия ошибки определения пространственных координат с использованием ИНС, DЛККС - заданная дисперсия ошибки определения оценки R1l, DНАП - заданная дисперсия ошибки определения пространственных координат с использованием НАП, если на этапе проверки наличия принятой ДИП в заданном временном интервале определено значение ωl=0, то реализуют второй вариант контроля работоспособности НАП с использованием ИНС посредством определения значения q2l второго признака работоспособности НАП, где q2l=[0,1], q2l=0 - НАП неработоспособна на момент tKl, q2l=1 - НАП работоспособна на момент tKl, если на этапе реализации второго варианта контроля работоспособности НАП с использованием ИНС определено значение q2l=0, то принимают значения хИНCl в качестве итоговых значений хBCl пространственных координат ВС, если на этапе реализации второго варианта контроля работоспособности НАП с использованием ИНС определено значение q2l=1, то итоговые значения хBCl пространственных координат ВС определяют на основе комплексной обработки информации от НАП и ИНС с использованием значений хИНCl, хНАПl, DИНС и DНАП, отличающийся тем, что значение q2l второго признака работоспособности НАП определяют в результате выявления соответствия или несоответствия проверочного и контрольного отклонений местоположения ВС, оцениваемых с использованием измерений, формируемых НАП и ИНС соответственно в текущий и предыдущий контрольные моменты времени на протяжении полета ВС, при этом оценивают проверочное отклонение dxНАПl местоположения ВС, определенного с использованием НАП в текущий контрольный момент времени tKl, относительно местоположения ВС, определенного с использованием НАП в предыдущий контрольный момент времени tKl, оценивают контрольное отклонение dхИНCl местоположения ВС, определенного с использованием ИНС в текущий контрольный момент времени tKl, относительно местоположения ВС, определенного с использованием ИНС в предыдущий контрольный момент времени tK(l-1), определяют абсолютную невязку ΔdНАПИНCl между величинами dxНАПl и dxИНCl, сравнивают абсолютную невязку ΔdНАПИНCl с заданным допустимым значением Δdдоп., если абсолютная невязка ΔdxНАПИНCl не превышает заданного допустимого значения Δd, то определяют значение q2l=1, иначе определяют значение q2l=0.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ВОЗДУШНОГО СУДНА | 2023 |
|
RU2804419C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ВОЗДУШНОГО СУДНА | 2021 |
|
RU2778938C1 |
| СПОСОБ ПОВЫШЕНИЯ ЦЕЛОСТНОСТИ ИСПОЛЬЗУЕМЫХ СИГНАЛОВ НАВИГАЦИОННЫХ СПУТНИКОВ С ПОМОЩЬЮ ЛОКАЛЬНОЙ КОНТРОЛЬНО-КОРРЕКТИРУЮЩЕЙ СТАНЦИИ (ЛККС) С УЧЕТОМ ВЛИЯНИЯ АНОМАЛЬНОЙ ИОНОСФЕРЫ | 2013 |
|
RU2542326C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО ПОЛОЖЕНИЯ ПРИ МЕЖСАМОЛЕТНОЙ НАВИГАЦИИ | 2016 |
|
RU2624994C1 |
| CN 114235007 A, 25.03.2022 | |||
| CN 101833101 A, 15.09.2010 | |||
| US 11442174 B2, 13.09.2022. | |||

