Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств контроля работоспособности навигационной аппаратуры потребителя (НАП) воздушного судна (ВС).
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ контроля достоверности информации, принимаемой навигационной аппаратурой потребителя воздушного судна (см., например, патент на изобретение №2740398 от 14 января 2021 г.), который может быть использован для контроля работоспособности НАП глобальной навигационной спутниковой системы (ГНСС) ВС. Данный способ применительно к задаче контроля работоспособности НАП ВС в условиях одной действующей ГНСС заключается в следующем. На стороне локальной контрольно-корректирующей станции (ЛККС), имеющей заранее точно определенные координаты  своей дислокации в заданной прямоугольной системе координат OXYZ, определяют моменты времени передачи дополнительных информационных посылок, формируют и передают по радиоканалу на ВС, взаимодействующее с ЛККС, в определенные моменты времени дополнительные информационные посылки, содержащие момент времени передачи данной посылки и пространственные координаты ЛККС в заданной прямоугольной системе координат OXYZ, на борту ВС, взаимодействующего с ЛККС, формируют оценки
своей дислокации в заданной прямоугольной системе координат OXYZ, определяют моменты времени передачи дополнительных информационных посылок, формируют и передают по радиоканалу на ВС, взаимодействующее с ЛККС, в определенные моменты времени дополнительные информационные посылки, содержащие момент времени передачи данной посылки и пространственные координаты ЛККС в заданной прямоугольной системе координат OXYZ, на борту ВС, взаимодействующего с ЛККС, формируют оценки  собственных пространственных координат в заданной прямоугольной системе координат OXYZ с использованием НАП (хНАП - оценка горизонтальной координаты ВС по оси ОХ, сформированная НАП; уНАП - оценка высоты ВС (оценка вертикальной координаты ВС по оси OY), сформированная НАП; zHAП - оценка горизонтальной координаты ВС по оси OZ, сформированная НАП), принимают дополнительную информационную посылку и фиксируют момент времени ее приема, определяют первую оценку расстояния R} между ВС и ЛККС по разнице между моментами приема и передачи дополнительной информационной посылки, определяют вторую оценку расстояния R2 между ВС и ЛККС по пространственным координатам ВС и ЛККС, при этом используют пространственные координаты ЛККС, переданные в дополнительной информационной посылке и оценки пространственных координат ВС, сформированные с использованием содержащейся в спутниковых сигналах ГНСС информации, сравнивают модуль разности оценок расстояний R1 и R2 с заданным пороговым значением h, если модуль разности оценок расстояний R1 и R2 превышает заданное пороговое значение h, то формируют решение q=0 о том, что достоверность информации, принимаемой НАП от спутников ГНСС, не соответствует заданным требованиям (НАП является неработоспособной), в противном случае формируют решение q=1 о том, что достоверность информации, принимаемой НАП от спутников ГНСС, соответствует заданным требованиям (НАП является работоспособной).
собственных пространственных координат в заданной прямоугольной системе координат OXYZ с использованием НАП (хНАП - оценка горизонтальной координаты ВС по оси ОХ, сформированная НАП; уНАП - оценка высоты ВС (оценка вертикальной координаты ВС по оси OY), сформированная НАП; zHAП - оценка горизонтальной координаты ВС по оси OZ, сформированная НАП), принимают дополнительную информационную посылку и фиксируют момент времени ее приема, определяют первую оценку расстояния R} между ВС и ЛККС по разнице между моментами приема и передачи дополнительной информационной посылки, определяют вторую оценку расстояния R2 между ВС и ЛККС по пространственным координатам ВС и ЛККС, при этом используют пространственные координаты ЛККС, переданные в дополнительной информационной посылке и оценки пространственных координат ВС, сформированные с использованием содержащейся в спутниковых сигналах ГНСС информации, сравнивают модуль разности оценок расстояний R1 и R2 с заданным пороговым значением h, если модуль разности оценок расстояний R1 и R2 превышает заданное пороговое значение h, то формируют решение q=0 о том, что достоверность информации, принимаемой НАП от спутников ГНСС, не соответствует заданным требованиям (НАП является неработоспособной), в противном случае формируют решение q=1 о том, что достоверность информации, принимаемой НАП от спутников ГНСС, соответствует заданным требованиям (НАП является работоспособной).
Возможность использования, приведенного выше способа для контроля работоспособности НАП объясняется следующим. Под работоспособностью (работоспособным состоянием) НАП понимается состояние НАП, в котором она соответствует всем требованиям, установленным в документации. Под неработоспособностью (неработоспособным состоянием) НАП понимается состояние НАП, в котором она не способна выполнять хотя бы одну требуемую функцию. Несоответствие достоверности информации, принимаемой НАП от спутников ГНСС, заданным требованиям приводит к тому, что НАП формирует ложные навигационные измерения (в том числе оценки пространственных координат). Под ложными навигационными измерениями понимаются навигационные измерения, точность которых не соответствует заданным требованиям. В свою очередь состояние, в котором НАП формирует ложные навигационные измерения, является неработоспособным состоянием НАП, так как в этом состоянии НАП не способна выполнять требуемую функцию формирования навигационных измерений с заданной точностью.
Анализ данного способа (прототипа) применительно к контролю работоспособности НАП показывает следующее. Формированию решения q=1 о том, что НАП является работоспособной можно поставить в соответствие условие  где ΔS1 - сектор неопределенности прототипа,
где ΔS1 - сектор неопределенности прототипа,  - условие принадлежности точки хНАП сектору неопределенности ΔS1. В общем случае сектор неопределенности ΔS представляет собой определенную область пространства, такую, что при выполнении условия
- условие принадлежности точки хНАП сектору неопределенности ΔS1. В общем случае сектор неопределенности ΔS представляет собой определенную область пространства, такую, что при выполнении условия  формируется решение q=1. Применительно к прототипу сектор неопределенности ΔS, представляет собой область пространства между двумя полусферами Smin и Smax; Smin - малая полусфера с центром в точке х0 местонахождения ЛККС и радиусом Rmin=R1-h; Smax - большая полусфера с центром в точке х0 местонахождения ЛККС и радиусом Rmax=R1+h. Увеличение расстояния между ЛККС и ВС в среднем приводит к увеличению оценки R1 и, как следствие, к существенному увеличению объема
формируется решение q=1. Применительно к прототипу сектор неопределенности ΔS, представляет собой область пространства между двумя полусферами Smin и Smax; Smin - малая полусфера с центром в точке х0 местонахождения ЛККС и радиусом Rmin=R1-h; Smax - большая полусфера с центром в точке х0 местонахождения ЛККС и радиусом Rmax=R1+h. Увеличение расстояния между ЛККС и ВС в среднем приводит к увеличению оценки R1 и, как следствие, к существенному увеличению объема  сектора неопределенности ΔS1, определяемого формулой
сектора неопределенности ΔS1, определяемого формулой

Объем  сектора неопределенности ΔS1, как видно из выражения (1), пропорционален квадрату оценки расстояния R1. В свою очередь, увеличение объема
сектора неопределенности ΔS1, как видно из выражения (1), пропорционален квадрату оценки расстояния R1. В свою очередь, увеличение объема  сектора неопределенности пропорционально квадрату оценки расстояния R1, приводит к значительному увеличению вероятности выполнения условия
сектора неопределенности пропорционально квадрату оценки расстояния R1, приводит к значительному увеличению вероятности выполнения условия  а следовательно и к увеличению вероятности формирования ошибочных решений о том, что НАП является работоспособной, даже при условии ее фактической неработоспособности, что соответствует существенному снижению вероятности правильного контроля работоспособности НАП.
а следовательно и к увеличению вероятности формирования ошибочных решений о том, что НАП является работоспособной, даже при условии ее фактической неработоспособности, что соответствует существенному снижению вероятности правильного контроля работоспособности НАП.
Таким образом, в качестве одного из недостатков прототипа можно отметить, то что увеличение расстояния между ЛККС и ВС приводит к существенному снижению вероятности правильного контроля работоспособности НАП.
Техническим результатом изобретения является повышение вероятности правильного контроля работоспособности НАП ВС.
Указанный результат достигается тем, что в известном способе, если модуль разности оценок расстояний R1 и R2 превышает заданное пороговое значение h, то формируют первое частное решение о том, что оценка R1 не соответствует оценке R2, в противном случае формируют первое частное решение о том, что оценка R1 соответствует оценке R2, дополнительно формируют оценку уБВ высоты ВС с использованием барометрического высотомера в течение полета ВС, сравнивают модуль разности оценок уБВ и уНАП с заданным допустимым отклонением Δудоп, если модуль разности оценок уБВ и уНАП превышает заданное допустимое отклонение Δудоп, то формируют второе частное решение о том, что оценка уБВ не соответствует оценке уНАП, в противном случае формируют второе частное решение о том, что оценка уБВ соответствует оценке уНАП, если оценка R1 соответствует оценке R2 и одновременно с этим оценка уБВ соответствует оценке уНАП, то формируют итоговое решение о том, что НАП является работоспособной, в противном случае формируют итоговое решение о том, что НАП является неработоспособной.
Сущность изобретения заключается в том, что контроль работоспособности НАП осуществляется в результате комплексной обработки информации от НАП, ЛККС и барометрического высотомера, и основан на совместной проверке пары соответствий: с одной стороны, проверяется соответствие оценок расстояния между ЛККС и ВС, сформированных с использованием НАП и ЛККС, а с другой стороны проверяется соответствие оценок высоты ВС, сформированных НАП и барометрическим высотомером. При этом итоговое решение о том, что НАП является работоспособной формируется только при условии одновременного выполнения пары вышеприведенных соответствий. Это позволяет значительно уменьшить сектор неопределенности по отношению к прототипу и, как следствие, приводит к повышению вероятности правильного контроля работоспособности НАП ВС.
Для предлагаемого способа сектор неопределенности ΔS2 представляет собой часть сектора неопределенности прототипа ΔS1, находящуюся между двумя параллельными плоскостями Р1 и Р2, где плоскость Р1 - плоскость, расположенная перпендикулярно земной поверхности на расстоянии  от точки х0 местонахождения ЛККС; плоскость Р2 - плоскость, расположенная перпендикулярно земной поверхности на расстоянии
от точки х0 местонахождения ЛККС; плоскость Р2 - плоскость, расположенная перпендикулярно земной поверхности на расстоянии  от точки х0 местонахождения ЛККС. Объем сектора неопределенности для предлагаемого способа определяется по формуле
от точки х0 местонахождения ЛККС. Объем сектора неопределенности для предлагаемого способа определяется по формуле

Как видно из выражения (2), объем  сектора неопределенности для предлагаемого способа пропорционален оценке расстояния R1, в отличие от прототипа для которого, как было показано выше, объем
сектора неопределенности для предлагаемого способа пропорционален оценке расстояния R1, в отличие от прототипа для которого, как было показано выше, объем  сектора неопределенности пропорционален квадрату оценки расстояния R1. Следовательно, при увеличении расстояния между ЛЛКС и ВС, объем
сектора неопределенности пропорционален квадрату оценки расстояния R1. Следовательно, при увеличении расстояния между ЛЛКС и ВС, объем  сектора неопределенности для предлагаемого способа будет увеличиваться значительно медленнее, чем объем
сектора неопределенности для предлагаемого способа будет увеличиваться значительно медленнее, чем объем  сектора неопределенности для прототипа. Этим объясняется уменьшения вероятности формирования ошибочных решений о том, что НАП является работоспособной, при условии ее фактической неработоспособности, что соответствует повышению вероятности правильного контроля работоспособности НАП по отношению к прототипу.
сектора неопределенности для прототипа. Этим объясняется уменьшения вероятности формирования ошибочных решений о том, что НАП является работоспособной, при условии ее фактической неработоспособности, что соответствует повышению вероятности правильного контроля работоспособности НАП по отношению к прототипу.
Данный способ включает в себя следующие этапы:
1 На стороне наземной стационарной ЛККС, имеющей заранее точно определенные координаты  своей дислокации в заданной прямоугольной системе координат OXYZ:
своей дислокации в заданной прямоугольной системе координат OXYZ:
1.1 Определение моментов времени ti0 передачи дополнительных информационных посылок в соответствии с выражением

где t1 - заданный первый момент времени передачи дополнительной информационной посылки, i = 0, 1, 2, 3, …, Δt - установленный интервал времени между моментами времени передачи дополнительных информационных посылок.
1.2 Формирование и передача по радиоканалу в определенные моменты времени ti0 дополнительных информационные посылок  содержащих момент времени ti0 передачи данной посылки и пространственные координаты ЛККС х0 в заданной прямоугольной системе координат OXYZ.
содержащих момент времени ti0 передачи данной посылки и пространственные координаты ЛККС х0 в заданной прямоугольной системе координат OXYZ.
2 На борту воздушного судна, взаимодействующего с ЛККС:
2.1 Прием и обработка спутниковых сигналов от ГНСС с помощью НАП.
2.2 Формирование оценок  собственных пространственных координат ВС в заданной прямоугольной системе координат OXYZ с использованием НАП.
собственных пространственных координат ВС в заданной прямоугольной системе координат OXYZ с использованием НАП.
2.3 Формирование оценки уБВ высоты ВС с использованием барометрического высотомера в течение полета ВС.
2.4 Прием дополнительной информационной посылки  и фиксация момента времени ti1 ее приема.
и фиксация момента времени ti1 ее приема.
2.5 Определение первой оценки расстояния между ВС и ЛККС в соответствии с выражением

2.6 Определение второй оценки R2 расстояния между ВС и ЛККС в соответствии с выражением

2.7 Формирование первого частного решения q1 о соответствии или несоответствии оценок R1 и R2, в соответствии с выражением

где q1=0 - первая оценка R1 расстояния между ВС и ЛККС не соответствует второй оценке R2 расстояния между ВС и ЛККС; q1=1 - первая оценка R1 расстояния между ВС и ЛККС соответствует второй оценке R2 расстояния между ВС и ЛККС, h - заданное пороговое значение.
2.8 Формирование второго частного решения q2 о соответствии или несоответствии оценок уБВ и уНАП в соответствии с выражением

где q2=0 - оценка уБВ не соответствует оценке уНАП; q2=1 - оценка уБВ соответствует оценке уНАП, Δудоп. - заданное допустимое отклонение высоты, измеряемой НАП от высоты измеряемой барометрическим высотомером.
2.9 Формирование итогового решения q о работоспособности или неработоспособности НАП ВС в соответствии с выражением

где q ∈ [0,1], q=0 - НАП ВС является неработоспособной; q=1 - НАП ВС является работоспособной.
Согласно выражениям (4) - (8) итоговое решение о том, что НАП ВС является работоспособной формируется в том случае, если оценка R1 соответствует оценке R2 и одновременно с этим оценка уБВ соответствует оценке уНАП, в противном случае формируется итоговое решение о том, что НАП является неработоспособной.
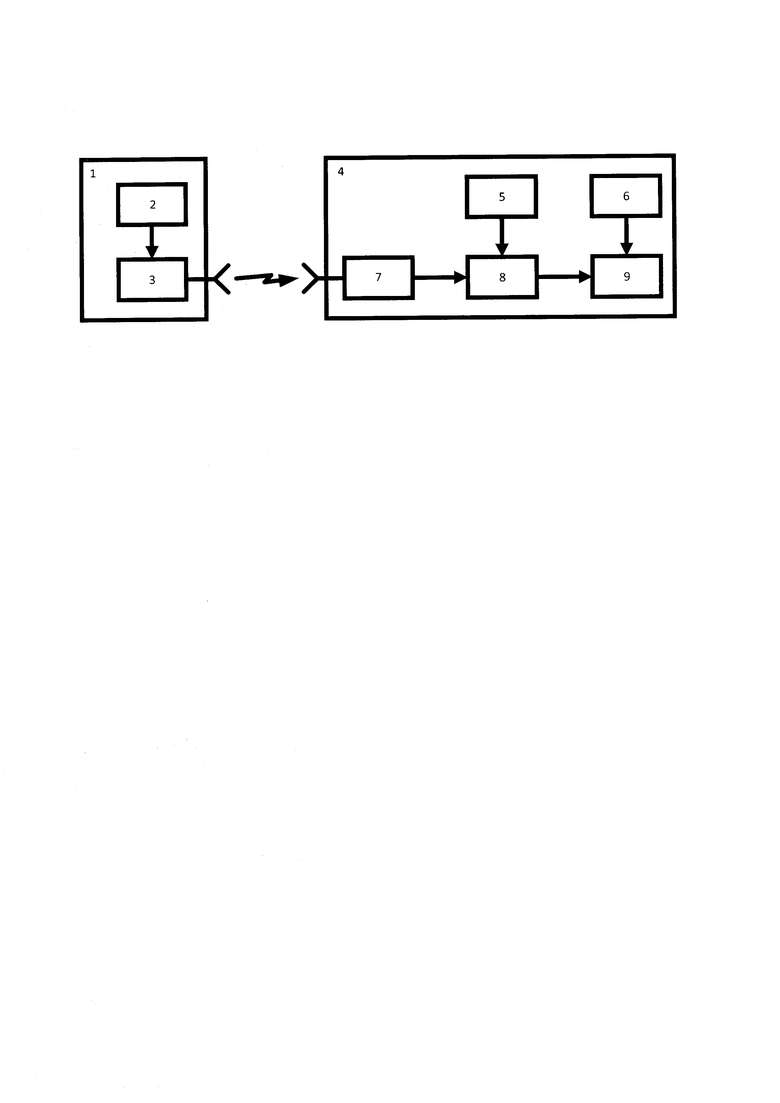
Данный способ может быть реализован, например, с помощью комплекса устройств, структурная схема которого приведена на фигуре 1, где обозначено: 1 - ЛККС; 2 - блок управления (БУ); 3 - аппаратура формирования и передачи дополнительной информационной посылки (АФП ДИП); 4 - ВС, взаимодействующее с ЛККС; 5 - НАП; 6 - барометрический высотомер; 7 - приемник дополнительной информационной посылки (ПРМ ДИП); 8 - БУ; 8 - блок обработки информации (БОИ); 9 - блок обработки информации (БОИ).
БУ 2 предназначен для определения моментов времени ti0 передачи дополнительных информационных посылок в соответствии с выражением (3) и управления АФП ДИП 3. АФП ДИП 3 предназначена для формирования и передачи в определенные моменты времени ti0 дополнительных информационные посылок  НАП 5 предназначена для приема и обработки спутниковых сигналов от ГНСС, а также для формирования оценок пространственных координат ВС
НАП 5 предназначена для приема и обработки спутниковых сигналов от ГНСС, а также для формирования оценок пространственных координат ВС  в заданной прямоугольной системе координат OXYZ. БВ 6 предназначен для формирования оценки уБН высоты ВС в течение полета. ПРМ ДИП 7 предназначен для приема дополнительной информационной посылки
в заданной прямоугольной системе координат OXYZ. БВ 6 предназначен для формирования оценки уБН высоты ВС в течение полета. ПРМ ДИП 7 предназначен для приема дополнительной информационной посылки  и фиксации момента времени ti1 ее приема. БУ 8 предназначен для управления элементами комплекса на борту ВС 4. БОИ 9 предназначен для обработки, поступающей от НАП 5, ПРМ ДИП 7 и БВ 6, информации и формирования итогового решения о работоспособности или неработоспособности НАП.
и фиксации момента времени ti1 ее приема. БУ 8 предназначен для управления элементами комплекса на борту ВС 4. БОИ 9 предназначен для обработки, поступающей от НАП 5, ПРМ ДИП 7 и БВ 6, информации и формирования итогового решения о работоспособности или неработоспособности НАП.
Комплекс работает следующим образом. БУ 2 определяет моменты времени ti0 передачи дополнительных информационных посылок в соответствии с выражением (3) и управляет АФП ДИП 3. АФП ДИП 3 формирует и под управлением БУ 2 передает в определенные моменты времени ti0 дополнительные информационные посылки  . БУ 8 управляет элементами комплекса на борту ВС 4. НАП 5 принимает и обрабатывает спутниковые сигналы от ГНСС, а также формирует оценки пространственных координат ВС
. БУ 8 управляет элементами комплекса на борту ВС 4. НАП 5 принимает и обрабатывает спутниковые сигналы от ГНСС, а также формирует оценки пространственных координат ВС  в заданной прямоугольной системе координат OXYZ. Оценки пространственных координат ВС
в заданной прямоугольной системе координат OXYZ. Оценки пространственных координат ВС  через БУ 8 поступают на БОИ 9. ПРМ ДИП 7 принимает дополнительную информационную посылку
через БУ 8 поступают на БОИ 9. ПРМ ДИП 7 принимает дополнительную информационную посылку  и фиксирует момент времени ti1 ее приема. Величины fi0, x0 и ti1 через БУ 8 поступают на БОИ 9. БВ 6 формирует оценку уБВ высоты ВС в течение полета. Значения оценки уБВ высоты ВС в течение полета поступают на БОИ 9. БОИ 9, под управлением БУ 8, обрабатывает поступающую от НАП 5, ПРМ ДИП 7 и БВ 9 информацию согласно выражениям (4) - (7) и формирует итоговое решение q о работоспособности или неработоспособности НАП ВС согласно выражению (8).
и фиксирует момент времени ti1 ее приема. Величины fi0, x0 и ti1 через БУ 8 поступают на БОИ 9. БВ 6 формирует оценку уБВ высоты ВС в течение полета. Значения оценки уБВ высоты ВС в течение полета поступают на БОИ 9. БОИ 9, под управлением БУ 8, обрабатывает поступающую от НАП 5, ПРМ ДИП 7 и БВ 9 информацию согласно выражениям (4) - (7) и формирует итоговое решение q о работоспособности или неработоспособности НАП ВС согласно выражению (8).
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ контроля работоспособности НАП, осуществляемый в результате комплексной обработки информации от НАП, ЛККС и БВ, в котором итоговое решение о том, что НАП является работоспособной формируется только при условии одновременного соответствия оценок расстояния между ЛККС и ВС, сформированных с использованием НАП и ЛККС, и оценок высоты ВС, сформированных НАП и барометрическим высотомером.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что если контроль работоспособности НАП осуществлять в результате комплексной обработки информации от НАП, ЛККС и БВ, при этом итоговое решение о том, что НАП является работоспособной формировать только при условии одновременного соответствия оценок расстояния между ЛККС и ВС, сформированных с использованием НАП и ЛККС, и оценок высоты ВС, сформированных НАП и барометрическим высотомером, то это приведет к повышению вероятности правильного контроля работоспособности НАП.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств контроля работоспособности навигационной аппаратуры потребителя (НАП) воздушного судна (ВС). Техническим результатом изобретения является повышение вероятности правильного контроля работоспособности НАП ВС. В заявленном способе контроль работоспособности НАП осуществляется в результате комплексной обработки информации от НАП, локальной контрольно-корректирующей станции (ЛККС) и барометрического высотомера. При этом осуществляют совместную проверку пары соответствий: соответствия оценок расстояния между ЛККС и ВС, сформированных с использованием НАП и ЛККС, а также соответствия оценок высоты ВС, сформированных НАП и барометрическим высотомером. Итоговое решение о том, что НАП является работоспособной, формируют при условии одновременного выполнения пары вышеприведенных соответствий. 1 ил.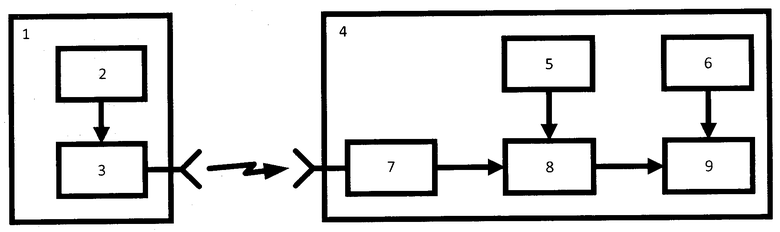
Способ контроля работоспособности навигационной аппаратуры потребителя (НАП) воздушного судна (ВС), заключающийся в том, что на стороне локальной контрольно-корректирующей станции (ЛККС), имеющей заранее точно определенные координаты  своей дислокации в заданной прямоугольной системе координат OXYZ, определяют моменты времени передачи дополнительных информационных посылок, формируют и передают по радиоканалу на ВС, взаимодействующее с ЛККС, в определенные моменты времени дополнительные информационные посылки, содержащие момент времени передачи данной посылки и пространственные координаты ЛККС в заданной прямоугольной системе координат OXYZ, на борту ВС, взаимодействующего с ЛККС, формируют оценки
своей дислокации в заданной прямоугольной системе координат OXYZ, определяют моменты времени передачи дополнительных информационных посылок, формируют и передают по радиоканалу на ВС, взаимодействующее с ЛККС, в определенные моменты времени дополнительные информационные посылки, содержащие момент времени передачи данной посылки и пространственные координаты ЛККС в заданной прямоугольной системе координат OXYZ, на борту ВС, взаимодействующего с ЛККС, формируют оценки  собственных пространственных координат в заданной прямоугольной системе координат OXYZ с использованием НАП, принимают дополнительную информационную посылку и фиксируют момент времени ее приема, определяют первую оценку расстояния R1 между ВС и ЛККС по разнице между моментами приема и передачи дополнительной информационной посылки, определяют вторую оценку расстояния R2 между ВС и ЛККС по пространственным координатам ВС и ЛККС, при этом используют пространственные координаты ЛККС, переданные в дополнительной информационной посылке и оценки пространственных координат ВС, сформированные НАП, сравнивают модуль разности оценок расстояний R1 и R2 с заданным пороговым значением h, отличающийся тем, что, если модуль разности оценок расстояний R1 и R2 превышает заданное пороговое значение h, то формируют первое частное решение о том, что оценка R1 не соответствует оценке R2, в противном случае формируют первое частное решение о том, что оценка R1 соответствует оценке R2, дополнительно формируют оценку уБВ высоты ВС с использованием барометрического высотомера в течение полета ВС, сравнивают модуль разности оценок уБВ и уНАП с заданным допустимым отклонением Δудоп, если модуль разности оценок уБВ и уНАП превышает заданное допустимое отклонение Δудоп, то формируют второе частное решение о том, что оценка уБВ не соответствует оценке уНАП, в противном случае формируют второе частное решение о том, что оценка уБВ соответствует оценке уНАП, если оценка R1 соответствует оценке R2 и одновременно с этим оценка уБВ соответствует оценке уНАП, то формируют итоговое решение о том, что НАП является работоспособной, в противном случае формируют итоговое решение о том, что НАП является неработоспособной.
собственных пространственных координат в заданной прямоугольной системе координат OXYZ с использованием НАП, принимают дополнительную информационную посылку и фиксируют момент времени ее приема, определяют первую оценку расстояния R1 между ВС и ЛККС по разнице между моментами приема и передачи дополнительной информационной посылки, определяют вторую оценку расстояния R2 между ВС и ЛККС по пространственным координатам ВС и ЛККС, при этом используют пространственные координаты ЛККС, переданные в дополнительной информационной посылке и оценки пространственных координат ВС, сформированные НАП, сравнивают модуль разности оценок расстояний R1 и R2 с заданным пороговым значением h, отличающийся тем, что, если модуль разности оценок расстояний R1 и R2 превышает заданное пороговое значение h, то формируют первое частное решение о том, что оценка R1 не соответствует оценке R2, в противном случае формируют первое частное решение о том, что оценка R1 соответствует оценке R2, дополнительно формируют оценку уБВ высоты ВС с использованием барометрического высотомера в течение полета ВС, сравнивают модуль разности оценок уБВ и уНАП с заданным допустимым отклонением Δудоп, если модуль разности оценок уБВ и уНАП превышает заданное допустимое отклонение Δудоп, то формируют второе частное решение о том, что оценка уБВ не соответствует оценке уНАП, в противном случае формируют второе частное решение о том, что оценка уБВ соответствует оценке уНАП, если оценка R1 соответствует оценке R2 и одновременно с этим оценка уБВ соответствует оценке уНАП, то формируют итоговое решение о том, что НАП является работоспособной, в противном случае формируют итоговое решение о том, что НАП является неработоспособной.

