Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств определения пространственных координат воздушного судна (ВС).
Известен способ определения пространственных координат воздушного судна (ВС) (см., например, патент на изобретение №№2778938 от 29.08.2022 г.), заключающийся в том, что на стороне локальной контрольно-корректирующей станции (ЛККС), имеющей заранее точно определенные координаты своей дислокации в заданной прямоугольной системе координат OXYZ, определяют моменты времени передачи дополнительных информационных посылок, формируют и передают по радиоканалу на воздушное судно, взаимодействующее с ЛККС, в определенные моменты времени дополнительные информационные посылки, содержащие момент времени передачи данной посылки и пространственные координаты ЛККС в заданной прямоугольной системе координат OXYZ, на борту ВС, взаимодействующего с ЛККС, формируют оценки собственных пространственных координат в заданной прямоугольной системе координат (СК) OXYZ с использованием навигационной аппаратуры потребителя (НАП) глобальной спутниковой навигационной системы (ГНСС), принимают дополнительную информационную посылку и фиксируют момент времени ее приема, определяют первую оценку расстояния R1 между ВС и ЛККС по разнице между моментами приема и передачи дополнительной информационной посылки, определяют вторую оценку расстояния R2 между ВС и ЛККС по пространственным координатам ВС и ЛККС, при этом используют пространственные координаты ЛККС, переданные в дополнительной информационной посылке и сформированные НАП оценки пространственных координат ВС, сравнивают модуль разности оценок расстояний R1 и R2 с заданным пороговым значением h, если модуль разности оценок расстояний R1 и R2 превышает заданное пороговое значение h, то формируют решение q=0 о том, что НАП неработоспособна, в противном случае формируют решение q=1 о том, что НАП работоспособна, на борту ВС, взаимодействующего с ЛККС, дополнительно формируют оценки собственных пространственных координат в заданной прямоугольной СК OXYZ с использованием инерциальной навигационной системы (ИНС), если на этапе определения работоспособности НАП сформировано решение q=1 о том, что НАП работоспособна, то формируют итоговые оценки пространственных координат ВС на основе комплексной обработке информации от НАП и ИНС, в противном случае определяют координаты точки F пересечения характерной сферы S=[Оо, R1] и характерного луча L=[Oo, A], где S - сфера с центром в точке Оо и радиусом R1, Oo - точка, координаты которой совпадают с координатами ЛККС, L - луч с началом в точке Oo, проходящий через точку А, координаты которой совпадают со сформированными ИНС оценками пространственных координат ВС, принимают координаты точки F в качестве итоговых оценок пространственных координат ВС.
Одним из недостатков данного способа является снижение точности определяемых пространственных координат ВС в условиях отсутствия принятой ДИП от ЛККС (отсутствие принятой ДИП может быть вызвано разного рода дестабилизирующими факторами, влияющими на процесс ее передачи и приема, а также неработоспособностью отдельных конструктивных элементов ЛККС). Это объясняется следующим. В условиях отсутствия принятой ДИП от ЛККС в прототипе отсутствует возможность контроля работоспособности НАП и, следовательно, отсутствует возможность выявления неработоспособной НАП, что в свою очередь является причиной того, что ошибки, вызванные неработоспособностью НАП, не будут исключены из итоговых значений пространственных координат ВС и это приведет к снижению их точности в целом.
Техническим результатом изобретения повышение точности определяемых пространственных координат ВС.
Указанный результат достигается тем, что в известном способе перед контролем работоспособности НАП с использованием очередного контрольного момента времени tKl и момента tПр.l времени приема крайней ДИП проверяют наличие принятой ДИП в заданном временном интервале ΔtК посредством определения значения ωl признака наличия ДИП, где ωl=[0,1], ωl=1 - в интервале ΔtК относительно момента tKl имеется принятая ДИП, ωl=0 - в интервале ΔtК относительно момента tKl отсутствует принятая ДИП, при этом если разность моментов tKl и tПр.l превышает интервал ΔtК, то определяют ωl=0, иначе определяют ωl=1, контроль работоспособности НАП с использованием ЛККС осуществляют только в том случае, если на этапе проверки наличия принятой ДИП в заданном временном интервале определено значение ωl=1, если в результате контроля работоспособности НАП с использованием ЛККС определено значение q1l=1, то итоговые значения xBCl пространственных координат ВС определяют на основе комплексной обработки информации от ИНС, ЛККС и НАП с использованием значений хИНСЛККСl, хНАПl, DИНС, DЛККС и DНАП, где q1l=[0,1] - значение первого признака работоспособности НАП на момент tKl, q1l=0 - НАП неработоспособна на момент tKl, q1l=1 - НАП работоспособна на момент tKl, хИНСЛККСl - значения пространственных координат ВС в СК OXYZ, определенные на момент времени tKl на основе комплексной обработки информации от ИНС и ЛККС, хНАПl - сформированные НАП значения пространственных координат ВС в СК OXYZ на момент tKl, DИНС - заданная дисперсия ошибки определения пространственных координат с использованием ИНС, DЛККС - заданная дисперсия ошибки определения оценки R1l, DНАП - заданная дисперсия ошибки определения пространственных координат с использованием НАП, если на этапе проверки наличия принятой ДИП в заданном временном интервале определено значение ωl=0, то контроль работоспособности НАП осуществляют с использованием ИНС посредством определения значения q2l второго признака работоспособности НАП, где q2l=[0,1], q2l=0 - НАП неработоспособна на момент tKl, q2l=1 - НАП работоспособна на момент tKl, при этом, если модули разностей значений хИНСl, и хНАПl по всем осям СК OXYZ не превышают заданной допустимой невязки hИНСНАП, то определяют значение q2l=1, иначе определяют значение q2l=0, где хИНСl -сформированные ИНС значения пространственных координат ВС в СК OXYZ на момент tKl, если на этапе контроля работоспособности НАП с использованием ИНС определено значение q2l=0, то принимают значения хИНСl в качестве итоговых значений xBCl пространственных координат ВС, итоговые значения xBCl пространственных координат ВС определяют на основе комплексной обработки информации от НАП и ИНС с использованием значений хИНСl, xНАПl, DИНС и DНАП только в том случае, если на этапе контроля работоспособности НАП с использованием ИНС определено значение q2l=1.
Сущность изобретения заключается в том, что в рамках известного способа определения координат ВС (прототипа) перед контролем работоспособности НАП осуществляется проверка наличия принятой ДИП в заданном временном интервале, если в результате данной проверки сформировано решение о наличии принятой ДИП в заданном временном интервале, то контроль работоспособности НАП осуществляется с использованием ЛККС, если в результате данного контроля сформировано решение о том, что НАП неработоспособна, то итоговые значения пространственных координат ВС определяются на основе комплексной обработки информации от ИНС и ЛККС, если в результате контроля работоспособности НАП с использованием ЛККС сформировано решение о том, что НАП работоспособна, то итоговые значения пространственных координат ВС определяются на основе комплексной обработки информации от ИНС, ЛККС и НАП, если на этапе проверки наличия принятой ДИП в заданном временном интервале сформировано решение об отсутствии принятой ДИП в заданном временном интервале, то контроль работоспособности НАП осуществляется с использованием ИНС, если в результате данного контроля сформировано решение о том, что НАП неработоспособна, то в качестве итоговых значений пространственных координат ВС принимаются значения пространственных координат ВС, сформированные ИНС, если на этапе контроля работоспособности НАП с использованием ИНС сформировано решение о том, что НАП работоспособна, то итоговые значения пространственных координат ВС определяются на основе комплексной обработки информации от НАП и ИНС. Это с одной стороны позволяет выявлять неработоспособность НАП, даже в случае отсутствия принятой ДИП в заданном временном интервале, и как следствие, приводит к повышению точности определяемых пространственных координат ВС за счет исключения ошибок, вызванных неработоспособностью НАП, а с другой стороны позволяет повысить точность определяемых пространственных координат ВС при работоспособной НАП в случае наличия принятой ДИП в заданном временном интервале за счет комплексной обработки информации от НАП, ИНС и ЖКС.
Данный способ включает в себя следующие этапы:
1 На стороне наземной стационарной ЛККС, имеющей заранее точно определенные координаты х0=[x0,y0,z0] своей дислокации в заданной прямоугольной системе координат OXYZ:
1.1 Определение моментов времени t0i передачи ДИП в соответствии с выражением

где t1 - заданный первый момент времени передачи ДИП;  I - число передаваемых ДИП на протяжении полета ВС; Δt - установленный интервал времени между моментами времени передачи ДИП.
I - число передаваемых ДИП на протяжении полета ВС; Δt - установленный интервал времени между моментами времени передачи ДИП.
1.2 Формирование и передача по радиоканалу в определенные моменты времени t0i ДИП Vi=[t0i,х0], содержащих момент времени t0i передачи данной посылки и пространственные координаты ЛККС х0 в заданной прямоугольной системе координат OXYZ.
2 На борту ВС, взаимодействующего с ЛККС:
2.1 Формирование значений хИНС=[хИНС,уИНС,zИНС] собственных пространственных координат ВС в заданной прямоугольной системе координат OXYZ с помощью ИНС.
2.2 Формирование значений хНАП=[хНАП,уНАП,zНАП] собственных пространственных координат ВС в заданной прямоугольной системе координат OXYZ с помощью НАП.
2.3 Определение очередного контрольного момента времени tKl в соответствии с выражением

где tK0 - заданный начальный контрольный момент времени;  L - число контрольных моментов времени на протяжении полета ВС; ΔtК - заданный временной интервал между контрольными моментами времени.
L - число контрольных моментов времени на протяжении полета ВС; ΔtК - заданный временной интервал между контрольными моментами времени.
2.4 Прием очередной ДИП Vm=[t0m,x0], выделение значений t0m, х0 и фиксация момента времени tПр.m ее приема, где  М - число принятых ДИП на протяжении полета ВС, М≤I.
М - число принятых ДИП на протяжении полета ВС, М≤I.
Примечание: условие М≤I указывает на то, что не все переданные ДИП могут быть приняты на борту ВС. В идеальном случае, когда все переданные ДИП принимаются на борту ВС справедливы равенства: m=i, М=I.
2.5 Определение значения ωl признака наличия ДИП (проверка наличия принятой ДИП в заданном временном интервале ΔtК относительно очередного контрольного момента времени tKl) в соответствии с выражением

где ωl=[0,1], ωl=1 - в заданном временном интервале ΔtК относительно очередного контрольного момента времени tKl имеется принятая ДИП (формируется решение о наличии принятой ДИП в заданном временном интервале), ωl=0 - в заданном временном интервале ΔtК относительно очередного контрольного момента времени tKl отсутствует принятая ДИП (формируется решение об отсутствии принятой ДИП в заданном временном интервале), tПр.l - момент времени приема крайней ДИП (под крайней ДИП, понимается ДИП ближайшая по времени приема к очередному контрольному моменту времени tKl).
Таким образом, перед контролем работоспособности НАП осуществляется проверка наличия принятой ДИП в заданном временном интервале.
2.6 Если в пункте 2.5 определено значение ωl=0, то переход к пункту 2.13, иначе выполнение контроля работоспособности НАП с использованием ЛККС в соответствии с пунктами 2.7 - 2.9 и определение значений хИНСЛККСl=[хИНСЛККСl,yИНСЛККСl, zИНСЛККСl] пространственных координат ВС на контрольный момент времени tKl на основе комплексной обработки информации от ИНС и ЛККС в соответствии с пунктом 2.10.
2.7 Определение первой оценки R1l расстояния между ВС и ЛККС на контрольный момент времени tKl в соответствии с выражением

где С=3⋅108 м/с - скорость распространения радиоволны, t0l - момент времени передачи крайней ДИП.
2.8 Определение второй оценки R2l расстояния между ВС и ЛККС на контрольный момент времени tKl в соответствии с выражением

где хНАПl=[xнапl,yНАПl,zНАПl] - значения собственных пространственных координат ВС в заданной прямоугольной системе координат OXYZ, сформированные НАП на контрольный момент времени tKl.
2.9 Определение значения q1l первого признака работоспособности НАП на контрольный момент времени tKl с использованием ЛККС, в соответствии с выражением

где q1l=[0,1], q1l=0 - НАП неработоспособна на контрольный момент времени tKl; q1l=1 - НАП работоспособна на контрольный момент времени tKl, hЛККС - заданная допустимая невязка оценок расстояний между ВС и ЛККС.
Таким образом, если в результате проверки наличия принятой ДИП в заданном временном интервале сформировано решение о наличии принятой ДИП в заданном временном интервале (если в пункте 2.5 определено значение ωl=-1), то контроль работоспособности НАП осуществляется с использованием ЛККС.
2.10 Определение значений хИНСЛККСl=[xИНСЛККСl,yИНСЛККСL,zинслкксl] пространственных координат ВС на контрольный момент времени tKl на основе комплексной обработки информации от ИНС и ЛККС, в соответствии с пунктами 2.10.1-2.10.2:
2.10.1 Определение координат точки Fl пересечения сферы Sl=[Oo,R1l] и луча Ll=[Oo,Аl] (Sl - сфера с центром в точке Oo и радиусом R1l; Oo - точка, координаты которой совпадают с координатами ЛККС; Ll - луч с началом в точке Oo, проходящий через точку Аl, координаты которой совпадают со значениями пространственных координат ВС, сформированными ИНС на контрольный момент времени tKl) в соответствии с нижеприведенными процедурами 2.10.1.1 - 2.10.1.6:
2.10.1.1 Определение расстояния между точками О0 и Аl в соответствии с выражением

2.10.1.2 Определение координат xF1l=[xF1l,yF1l,zF1l] точки F1l (F1l - первая точка пересечения сферы Sl=[Oo,R1l] и прямой Рl=[Oo,Аl], где Рl - прямая, проходящая через точку Oo и точку Аl) в соответствии с выражениями:
2.10.1.3 Определение координат xF2l=[xF2l,yF2l,zF2l] точки F2l (F2l - вторая точка пересечения сферы Sl=[Oo,R1l] и прямой Рl=[Oo,Аl]) в соответствии с выражениями:
2.10.1.4 Определение расстояния R(AlF1l) между точками Аl и F1l в соответствии с выражением

2.10.1.5 Определение расстояния R(AlF2l) между точками Аl и F2l в соответствии с выражением

2.10.1.6 Определение координат xFl точки Fl (координаты точки Fl определяются, как координаты точки F1l или точки F2l, удовлетворяющей условию минимума расстояния до точки Аl, так как именно ближайшая к точке Аl точка F1l или точка F2l является точкой Fl пересечения характерной сферы Sl=[Oo,R1l] и характерного луча Ll=[Oo,Аl]) в соответствии с выражением

2.10.2 Принятие координат xFl точки Fl в качестве значений xИНСЛККСl=[xИНСЛККСl,yИНСЛККСl,zИНСЛККСl] пространственных координат ВС, определенных на основе комплексной обработки информации от ИНС и ЛККС, на контрольный момент времени tKl в соответствии с выражением

2.11 Если в пункте 2.9 определено значение q1l=1, то переход к пункту 2.12, иначе принятие значений xИНСЛККСl в качестве итоговых значений xBCl=[xBCl,yBCl,zBCl] пространственных координат ВС на контрольный момент времени tKl в соответствии с выражением

Таким образом, если на этапе контроля работоспособности НАП с использованием ЛККС сформировано решение о том, что НАП неработоспособна (если в пункте 2.9 определено значение q1l=0), то итоговые значения пространственных координат ВС определяются на основе комплексной обработки информации от ИНС и ЛККС.
2.12 Если в пункте 2.9 определено значение q1l=1, то определение итоговых значений xBCl=[xBCl,yBCl,zBCl] пространственных координат ВС на контрольный момент времени tKl на основе комплексной обработки информации от ИНС, ЛККС и НАП в соответствии с выражениями:
где DНАП - заданная дисперсия ошибки определения пространственных координат с использованием НАП; DИНС - заданная дисперсия ошибки определения пространственных координат с использованием ИНС; DЛККС - заданная дисперсия ошибки определения оценки R1l.
Таким образом, если в результате контроля работоспособности НАП с использованием ЛККС сформировано решение о том, что НАП работоспособна (если в пункте 2.9 определено значение q1l=1), то итоговые значения пространственных координат ВС определяются на основе комплексной обработки информации от ИНС, ЛККС и НАП.
2.13 Если в пункте 2.5 определено значение ωl=0, то выполнение контроля работоспособности НАП с использованием ИНС (определение значения ql2 второго признака работоспособности НАП) в соответствии с выражением

где
где q2l=[0,1], q2l=0 - НАЛ неработоспособна на контрольный момент времени tKl; q2l=1 - НАП работоспособна на контрольный момент времени tKl, hИНСНАП - заданная допустимая невязка между значениями пространственных координат, сформированными НАП с одной стороны и ИНС с другой стороны.
Таким образом, если на этапе проверки наличия принятой ДИП в заданном временном интервале сформировано решение об отсутствии принятой ДИП в заданном временном интервале (если в пункте 2.5 определено значение ωl=0), то контроль работоспособности НАП осуществляется с использованием ИНС.
2.14 Если в пункте 2.13 определено значение ql2=1, то переход к пункту 2.15, иначе принятие значений хИНСl в качестве итоговых значений xBCl=[xBCl,yBCl,zBCl] пространственных координат ВС на контрольный момент времени tKl в соответствии с выражением

Таким образом, если на этапе контроля работоспособности НАП с использованием ИНС сформировано решение о том, что НАП неработоспособна (если в пункте 2.13 определено значение ql2=0), то в качестве итоговых значений пространственных координат ВС принимаются значения пространственных координат ВС, сформированные ИНС.
2.15 Если в пункте 2.13 определено значение ql2=1, то определение итоговых значений xBCl=[xBCl,yBCl,zBCl] пространственных координат ВС на основе комплексной обработки информации от НАП и ИНС в соответствии с выражениями:
Таким образом, если в результате контроля работоспособности НАП с использованием ИНС сформировано решение о том, что НАП работоспособна (если в пункте 2.13 определено значение ql2=1), то итоговые значения пространственных координат ВС определяются на основе комплексной обработки информации от НАП и ИНС.
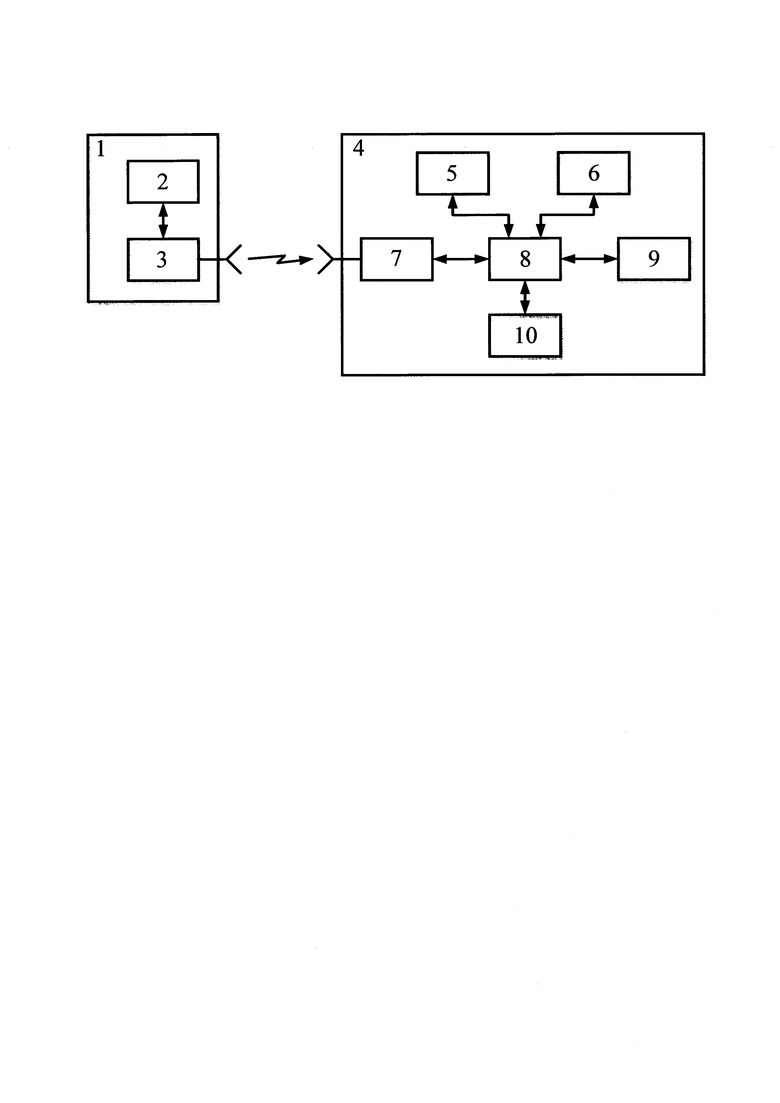
Данный способ может быть реализован, например, с помощью комплекса устройств, структурная схема которого приведена на фигуре, где обозначено: 1 - ЛККС; 2 - блок управления (БУ); 3 - аппаратура формирования и передачи дополнительной информационной посылки (АФП ДИП); 4 - ВС, взаимодействующее с ЛККС 1; 5 - первый блок контроля работоспособности (ПБКР) НАП; 6 - второй блок контроля работоспособности (ВБКР) НАП; 7 - приемник дополнительной информационной посылки (ПРМ ДИП); 7 - Блок управления, согласования и обработки информации (БУСОИ); 8 - блок управления и обработки информации (БУОИ); 9 - ИНС; 10 - НАП.
БУ 2 предназначен для определения моментов времени ti0 передачи ДИП в соответствии с пунктом 1.1 и управления АФП ДИП 3 на стороне ЛККС 1. АФП ДИП 3 предназначена для формирования и передачи в определенные моменты времени ti0 ДИП Vi. ПБКР НАП 5 предназначен для контроля работоспособности НАП 10 с использованием ЛККС. ВБКР НАП 6 предназначен для контроля работоспособности НАП 10 с использованием ИНС.ПРМ ДИП 7 предназначен для приема очередной ДИП Vi, выделения из нее значений t0m, х0 и фиксации момента времени tПР.m ее приема.
БУСОИ 8 предназначен для управления элементами комплекса на борту ВС 4, согласования их между собой и обработки информации. ИНС 9 предназначена для формирования значений хИНСl пространственных координат ВС 4 в СК OXYZ. НАП 10 предназначена для формирования значений хНАПl пространственных координат ВС 4 в СК OXYZ на основе обработки принятых спутниковых сигналов от ГНСС.
Комплекс работает следующим образом. БУ 2 определяет моменты времени ti0 передачи ДИП в соответствии с пунктом 1.1 и управляет АФП ДИП 3 на стороне ЖКС 1. АФП ДИП 3 формирует ДИП Vi и под управлением БУ 2 передает их в определенные моменты времени ti0. БУСОИ 8 управляет элементами комплекса на борту ВС 4 и согласует их между собой. ИНС 9 формирует значения хИНСl собственных пространственных координат ВС 4 в СК OXYZ. Значения хИНСl с выхода ИНС 9 поступают на БУСОИ 8, а также через БУСОИ 8 на ВБКР НАП 6. НАП 10 формирует значения хНАПl собственных пространственных координат ВС 4 в СК OXYZ на основе обработки принятых спутниковых сигналов от ГНСС. Значения хНАПl с выхода НАП 10 поступают на БУСОИ 8, а также через БУСОИ 8 на ПБКР НАП 5 и ВБКР НАП 6. БУСОИ 8 определяет очередной контрольный момент времени tKl в соответствии с пунктом 2.3. ПРМ ДИП 7 принимает очередную ДИП Vi, выделяет из нее значения t0m, х0 и фиксирует момент времени tПр.m ее приема. Значения t0m, х0 и tПр.m с выхода ПРМ ДИП 7 поступают на БУСОИ 8. БУСОИ 8 определяет значение ωl признака наличия ДИП в соответствии с пунктом 2.5. Если в БУСОИ 8 определено значение ωl=1, то данное значение поступает с выхода БУСОИ 8 на ПБКР НАП 5, а также в этом случае БУСОИ 8 определяет значения хИНСЛККСl пространственных координат ВС 4 на контрольный момент времени tKl на основе комплексной обработки информации от ИНС и ЛККС в соответствии с пунктом 2.10. Если в БУСОИ 8 определено значение ωl=0, то данное значение поступает с выхода БУСОИ 8 на ВБКР НАП 6. При поступлении значения ωl=1, ПБКР НАП 5 выполняет контроль работоспособности НАП 10 с использованием ЛККС посредством определения значения ql1 первого признака работоспособности НАП 10 в соответствии с пунктами 2.7 - 2.9. Определенное значение q1l с выхода ПБКР НАП 5 поступает на БУСОИ 8. При поступлении значения ωl=0, ВБКР НАП 6 выполняет контроль работоспособности НАП 10 с использованием ИНС посредством определения значения ql2 второго признака работоспособности НАП 10 в соответствии с пунктом 2.13. Определенное значение q2l с выхода ВБКР НАП 6 поступает на БУСОИ 8. Если с выхода ПБКР НАП 5 на вход БУСОИ 8 поступает значение q1l=0, то БУСОИ 8 определяет итоговые значения xBCl пространственных координат ВС 4 принимая в качестве них значения хИНСЛККСl в соответствии с пунктом 2.11. Если с выхода ПБКР НАП 5 на вход БУСОИ 8 поступает значение q1l=1, то БУСОИ 8 определяет итоговые значения xBCl пространственных координат ВС 4 на контрольный момент времени tKl на основе комплексной обработки информации от ИНС, ЛККС и НАП в соответствии с пунктом 2.12. Если с выхода ВБКР НАП 6 на вход БУСОИ 8 поступает значение ql2=0, то БУСОИ 8 определяет итоговые значения xBCl пространственных координат ВС 4 на контрольный момент времени tKl путем принятия в качестве них значений хИНСl в соответствии с пунктом 2.14. Если с выхода ВБКР НАП 6 на вход БУСОИ 8 поступает значение ql2=1, то БУСОИ 8 определяет итоговые значения xBCl пространственных координат ВС 4 на контрольный момент времени tKl на основе комплексной обработки информации от НАП и ИНС в соответствии с пунктом 2.15.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ определения пространственных координат ВС, сущность которого заключается в том, что перед контролем работоспособности НАП осуществляется проверка наличия принятой ДИП в заданном временном интервале, если в результате данной проверки сформировано решение о наличии принятой ДИП в заданном временном интервале, то контроль работоспособности НАП осуществляется с использованием ЛККС, если в результате данного контроля сформировано решение о том, что НАП неработоспособна, то итоговые значения пространственных координат ВС определяются на основе комплексной обработки информации от ИНС и ЛККС, если в результате контроля работоспособности НАП с использованием ЛККС сформировано решение о том, что НАП работоспособна, то итоговые значения пространственных координат ВС определяются на основе комплексной обработки информации от ИНС, ЛККС и НАП, если на этапе проверки наличия принятой ДИП в заданном временном интервале сформировано решение об отсутствии принятой ДИП в заданном временном интервале, то контроль работоспособности НАП осуществляется с использованием ИНС, если в результате данного контроля сформировано решение о том, что НАП неработоспособна, то в качестве итоговых значений пространственных координат ВС принимаются значения пространственных координат ВС, сформированные ИНС, если на этапе контроля работоспособности НАП с использованием ИНС сформировано решение о том, что НАП работоспособна, то итоговые значения пространственных координат ВС определяются на основе комплексной обработки информации от НАП и ИНС. Это с одной стороны позволяет выявлять неработоспособность НАП, даже в случае отсутствия принятой ДИП в заданном временном интервале, и как следствие, приводит к повышению точности определяемых пространственных координат ВС за счет исключения ошибок, вызванных неработоспособностью НАП, а с другой стороны позволяет повысить точность определяемых пространственных координат ВС при работоспособной НАП в случае наличия принятой ДИП в заданном временном интервале за счет комплексной обработки информации от НАП, ИНС и ЖКС.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что если перед контролем работоспособности НАП осуществлять проверку наличия принятой ДИП в заданном временном интервале, при этом если в результате данной проверки сформировано решение о наличии принятой ДИП в заданном временном интервале, то контроль работоспособности НАП осуществлять с использованием ЛККС, если в результате данного контроля сформировано решение о том, что НАП неработоспособна, то итоговые значения пространственных координат ВС определять на основе комплексной обработки информации от ИНС и ЛККС, если в результате контроля работоспособности НАП с использованием ЛККС сформировано решение о том, что НАП работоспособна, то итоговые значения пространственных координат ВС определять на основе комплексной обработки информации от ИНС, ЛККС и НАП, если на этапе проверки наличия принятой ДИП в заданном временном интервале сформировано решение об отсутствии принятой ДИП в заданном временном интервале, то контроль работоспособности НАП осуществлять с использованием ИНС, если в результате данного контроля сформировано решение о том, что НАП неработоспособна, то в качестве итоговых значений пространственных координат ВС принимать значения пространственных координат ВС, сформированные ИНС, если на этапе контроля работоспособности НАП с использованием ИНС сформировано решение о том, что НАП работоспособна, то итоговые значения пространственных координат ВС определять на основе комплексной обработки информации от НАП и ИНС, то это приведет к повышению точности определяемых пространственных координат ВС.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств определения пространственных координат воздушного судна (ВС). Техническим результатом изобретения является повышение точности определяемых пространственных координат ВС. В заявленном способе перед контролем работоспособности навигационной аппаратуры потребителя (НАП) глобальной навигационной спутниковой системы осуществляется проверка наличия принятой дополнительной информационной посылки (ДИП) в заданном временном интервале. Если в результате сформировано решение о наличии принятой ДИП, контроль работоспособности НАП осуществляется с использованием локальной контрольно-корректирующей станции (ЛККС). Если сформировано решение о том, что НАП неработоспособна, то итоговые значения пространственных координат ВС определяются на основе комплексной обработки информации от инерциальной навигационной системы (ИНС) и ЛККС. Если в результате контроля работоспособности НАП с использованием ЛККС сформировано решение о том, что НАП работоспособна, то итоговые значения пространственных координат ВС определяются на основе комплексной обработки информации от ИНС, ЛККС и НАП. Если на этапе проверки наличия принятой ДИП сформировано решение об отсутствии принятой ДИП в заданном временном интервале, то контроль работоспособности НАП осуществляется с использованием ИНС. Если в результате данного контроля сформировано решение о том, что НАП неработоспособна, то в качестве итоговых значений пространственных координат ВС принимаются значения пространственных координат ВС, сформированные ИНС. Если на этапе контроля работоспособности НАП с использованием ИНС сформировано решение о том, что НАП работоспособна, то итоговые значения пространственных координат ВС определяются на основе комплексной обработки информации от НАП и ИНС. Это с одной стороны позволяет выявлять неработоспособность НАП, даже в случае отсутствия принятой ДИП в заданном временном интервале, и, как следствие, приводит к повышению точности определяемых пространственных координат ВС за счет исключения ошибок, вызванных неработоспособностью НАП, а с другой стороны, позволяет повысить точность определяемых пространственных координат ВС при работоспособной НАП в случае наличия принятой ДИП в заданном временном интервале за счет комплексной обработки информации от НАП, ИНС и ЛККС. 1 ил.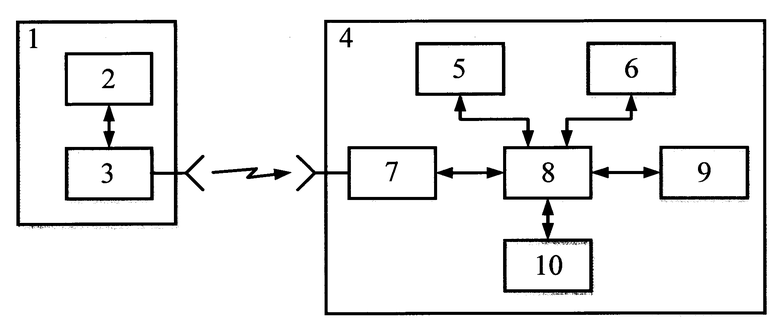
Способ определения пространственных координат воздушного судна (ВС), заключающийся в том, что на стороне наземной стационарной ЛККС, имеющей заранее точно определенные координаты х0 своей дислокации в заданной прямоугольной системе координат (СК) OXYZ, с использованием установленного интервала времени между моментами времени передачи дополнительных информационных посылок (ДИП) и заданного первого момента времени передачи ДИП определяют моменты времени t0i передачи ДИП, формируют и передают по радиоканалу в определенные моменты t0i ДИП Vi=[t0i,х0], содержащие значения t0i и х0, на борту ВС, взаимодействующего с локальной контрольно-корректирующей станцией (ЛККС), формируют значения хИНС собственных пространственных координат ВС в СК OXYZ с помощью инерциальной навигационной системы (ИНС), формируют значения хНАП собственных пространственных координат ВС в СК OXYZ с помощью НАП, с использованием заданного начального контрольного момента времени и заданного временного интервала ΔtК между контрольными моментами времени определяют очередной контрольный момент времени tKl, принимают очередную ДИП Vm, выделяют из нее значения t0m, х0 и фиксируют момент времени tПр.m ее приема, где  , М - число принятых ДИП на протяжении полета ВС, осуществляют контроль работоспособности НАП с использованием ЛККС посредством определения значения q1l первого признака работоспособности НАП, а также определяют значения хИНСЛККСl пространственных координат ВС на момент времени tKl на основе комплексной обработки информации от ИНС и ЛККС, где q1l=[0,1], q1l=0 - НАП неработоспособна на момент tKl, q1l=1 - НАП работоспособна на момент tKl, при этом с использованием моментов времени передачи и приема крайней ДИП определяют первую оценку R1l расстояния между ВС и ЛККС на момент tKl, с использованием значений хНАПl и х0 определяют вторую оценку R2l расстояния между ВС и ЛККС на момент tKl, где хНАПl - сформированные НАП значения пространственных координат ВС в СК OXYZ на момент tKl, если модуль разности оценок R1l и R2l превышает заданную невязку hЛККС, то определяют значение q1l=0, иначе определяют значение q1l=1, значения xИНСЛККСl определяют с использованием значений R1l, хИНСl, и х0, где хИНСl - сформированные ИНС значения пространственных координат ВС в СК OXYZ на момент tKl, если на этапе контроля работоспособности НАП с использованием ЛККС определено значение q1l=0, то принимают значения xИНСЛККСl в качестве итоговых значений хBCl пространственных координат ВС на момент tKl, осуществляют комплексную обработку информации от НАП и ИНС с использованием значений хИНСl, хНАП, DИНС и DНАП, отличающийся тем, что перед контролем работоспособности НАП с использованием момента tKl и момента tПр.l времени приема крайней ДИП проверяют наличие принятой ДИП в заданном временном интервале ΔtК посредством определения значения ωl признака наличия ДИП, где ωl=[0,1], ωl=1 - в интервале ΔtК относительно момента tKl имеется принятая ДИП, ωl=0 - в интервале ΔtК относительно момента tKl отсутствует принятая ДИП, при этом если разность моментов tKl и tПр.l превышает интервал ΔtК, то определяют значение ωl=0, иначе определяют значение ωl=1, контроль работоспособности НАП с использованием ЛККС осуществляют только в том случае, если на этапе проверки наличия принятой ДИП в заданном временном интервале определено значение ωl=1, если в результате контроля работоспособности НАП с использованием ЛККС определено значение q1l=1, то итоговые значения хBCl пространственных координат ВС определяют на основе комплексной обработки информации от ИНС, ЛККС и НАП с использованием значений хИНСЛККСl, хНАПl, DИНС, DЛККС и DНАП, где DИНС - заданная дисперсия ошибки определения пространственных координат с использованием ИНС, DЛККС - заданная дисперсия ошибки определения оценки R1l, DНАП - заданная дисперсия ошибки определения пространственных координат с использованием НАП, если на этапе проверки наличия принятой ДИП в заданном временном интервале определено значение ωl=0, то контроль работоспособности НАП осуществляют с использованием ИНС посредством определения значения q2l второго признака работоспособности НАП, где q2l=[0,1], q2l=0 - НАП неработоспособна на момент tKl, q2l=1 - НАП работоспособна на момент tKl, при этом, если модули разностей значений хИНСl и хНАПl по всем осям СК OXYZ не превышают заданной допустимой невязки hИНСНАП, то определяют значение q2l=1, иначе определяют значение q2l=0, если на этапе контроля работоспособности НАП с использованием ИНС определено значение q2l=0, то принимают значения хИНСl в качестве итоговых значений хBCl пространственных координат ВС, итоговые значения хBCl пространственных координат ВС определяют на основе комплексной обработки информации от НАП и ИНС с использованием значений хИНСl, хНАПl, DИНС и DНАП только в том случае, если на этапе контроля работоспособности НАП с использованием ИНС определено значение q2l=1.
, М - число принятых ДИП на протяжении полета ВС, осуществляют контроль работоспособности НАП с использованием ЛККС посредством определения значения q1l первого признака работоспособности НАП, а также определяют значения хИНСЛККСl пространственных координат ВС на момент времени tKl на основе комплексной обработки информации от ИНС и ЛККС, где q1l=[0,1], q1l=0 - НАП неработоспособна на момент tKl, q1l=1 - НАП работоспособна на момент tKl, при этом с использованием моментов времени передачи и приема крайней ДИП определяют первую оценку R1l расстояния между ВС и ЛККС на момент tKl, с использованием значений хНАПl и х0 определяют вторую оценку R2l расстояния между ВС и ЛККС на момент tKl, где хНАПl - сформированные НАП значения пространственных координат ВС в СК OXYZ на момент tKl, если модуль разности оценок R1l и R2l превышает заданную невязку hЛККС, то определяют значение q1l=0, иначе определяют значение q1l=1, значения xИНСЛККСl определяют с использованием значений R1l, хИНСl, и х0, где хИНСl - сформированные ИНС значения пространственных координат ВС в СК OXYZ на момент tKl, если на этапе контроля работоспособности НАП с использованием ЛККС определено значение q1l=0, то принимают значения xИНСЛККСl в качестве итоговых значений хBCl пространственных координат ВС на момент tKl, осуществляют комплексную обработку информации от НАП и ИНС с использованием значений хИНСl, хНАП, DИНС и DНАП, отличающийся тем, что перед контролем работоспособности НАП с использованием момента tKl и момента tПр.l времени приема крайней ДИП проверяют наличие принятой ДИП в заданном временном интервале ΔtК посредством определения значения ωl признака наличия ДИП, где ωl=[0,1], ωl=1 - в интервале ΔtК относительно момента tKl имеется принятая ДИП, ωl=0 - в интервале ΔtК относительно момента tKl отсутствует принятая ДИП, при этом если разность моментов tKl и tПр.l превышает интервал ΔtК, то определяют значение ωl=0, иначе определяют значение ωl=1, контроль работоспособности НАП с использованием ЛККС осуществляют только в том случае, если на этапе проверки наличия принятой ДИП в заданном временном интервале определено значение ωl=1, если в результате контроля работоспособности НАП с использованием ЛККС определено значение q1l=1, то итоговые значения хBCl пространственных координат ВС определяют на основе комплексной обработки информации от ИНС, ЛККС и НАП с использованием значений хИНСЛККСl, хНАПl, DИНС, DЛККС и DНАП, где DИНС - заданная дисперсия ошибки определения пространственных координат с использованием ИНС, DЛККС - заданная дисперсия ошибки определения оценки R1l, DНАП - заданная дисперсия ошибки определения пространственных координат с использованием НАП, если на этапе проверки наличия принятой ДИП в заданном временном интервале определено значение ωl=0, то контроль работоспособности НАП осуществляют с использованием ИНС посредством определения значения q2l второго признака работоспособности НАП, где q2l=[0,1], q2l=0 - НАП неработоспособна на момент tKl, q2l=1 - НАП работоспособна на момент tKl, при этом, если модули разностей значений хИНСl и хНАПl по всем осям СК OXYZ не превышают заданной допустимой невязки hИНСНАП, то определяют значение q2l=1, иначе определяют значение q2l=0, если на этапе контроля работоспособности НАП с использованием ИНС определено значение q2l=0, то принимают значения хИНСl в качестве итоговых значений хBCl пространственных координат ВС, итоговые значения хBCl пространственных координат ВС определяют на основе комплексной обработки информации от НАП и ИНС с использованием значений хИНСl, хНАПl, DИНС и DНАП только в том случае, если на этапе контроля работоспособности НАП с использованием ИНС определено значение q2l=1.
