Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств определения пространственных координат воздушного судна (ВС).
Известен способ определения навигационных параметров (см., например, ГЛОНАСС. Принципы построения и функционирования/ Под. ред. А.И. Перова, В.Н. Харисова. Изд. 3-е, перераб. - М.: Радиотехника, 2005, 688 с. С. 479, С 563-569), который может быть использован для определения пространственных координат ВС. Данный способ основан на комплексной обработки информации, поступающей от навигационной аппаратуры потребителя (НАП) спутниковой радионавигационной системы (СРНС) (НАП глобальной спутниковой навигационной системы (ГНСС)) с одной стороны и инерциальной навигационной системы (ИНС) с другой стороны. Сущность данного способа заключается в том, что сформированные ИНС оценки навигационных параметров (пространственных координат) корректируются оценками навигационных параметров (пространственных координат), сформированными НАП. Необходимость постоянной коррекции формируемых ИНС оценок навигационных параметров (пространственных координат), объясняется тем, что в ИНС в автономном режиме функционирования происходит постоянное накопление (увеличение) нестационарных ошибок с течением времени. Под нестационарной ошибкой в данном случае понимается ошибка, формирующаяся в результате нестационарного процесса, определяющего характер происхождения данной ошибки в ИНС.
Одним из недостатков данного способа является подверженность НАП помеховому воздействию, которое может приводить как к снижению достоверности навигационных параметров, формируемых НАП, так и к неработоспособности НАП в целом. Под неработоспособностью (неработоспособным состоянием) НАП понимается такое состояние НАП, в котором достоверность формируемых НАП навигационных параметров (пространственных координат) не соответствует заданным требованиям (достоверность информации, принимаемой НАП от спутников ГНСС (СРНС), не соответствует заданным требованиям). Неработоспособность НАП в свою очередь приводит к недопустимому снижению точности оценок навигационных параметров (пространственных координат), формируемых в результате комплексной обработки информации от НАП и ИНС. Это объясняется тем, что в случае неработоспособности НАП комплексная обработка информации от НАП и ИНС будет приводить к некорректному результату, так как оценки навигационных параметров, формируемые ИНС, будут корректироваться недостоверными оценками навигационных параметров, сформированными НАП.
Известен способ (прототип) (см., например, патент на изобретение №2740398 от 14 января 2021 г.), который может быть использован для контроля работоспособности НАП. Данный способ применительно к одной действующей ГНСС (СРНС) заключается в следующем. На стороне локальной контрольно-корректирующей станции (ЛККС), имеющей заранее точно определенные координаты своей дислокации в заданной прямоугольной системе координат OXYZ, определяют моменты времени передачи дополнительных информационных посылок, формируют и передают по радиоканалу на ВС, взаимодействующее с ЛККС, в определенные моменты времени дополнительные информационные посылки, содержащие момент времени передачи данной посылки и пространственные координаты ЛККС в заданной прямоугольной системе координат OXYZ, на борту ВС, взаимодействующего с ЛККС, формируют оценки собственных пространственных координат в заданной прямоугольной системе координат OXYZ с использованием НАП, принимают дополнительную информационную посылку и фиксируют момент времени ее приема, определяют первую оценку расстояния R1 между ВС и ЛККС по разнице между моментами приема и передачи дополнительной информационной посылки, определяют вторую оценку расстояния R2 между ВС и ЛККС по пространственным координатам ВС и ЛККС, при этом используют пространственные координаты ЛККС, переданные в дополнительной информационной посылке и оценки пространственных координат ВС, каждая из которых сформирована с использованием содержащейся в спутниковых сигналах ГНСС информации, сравнивают модуль разности оценок расстояний R1 и R2 с заданным пороговым значением h, если модуль разности оценок расстояний R1 и R2 превышает заданное пороговое значение h, то формируют решение о том, что НАП неработоспособна (достоверность информации, принимаемой НАП от спутников ГНСС, не соответствует заданным требованиям), в противном случае формируют решение о том, что НАП работоспособна (достоверность информации, принимаемой НАП от спутников ГНСС, соответствует заданным требованиям).
Техническим результатом изобретения является расширение функциональных возможностей прототипа на предмет определения пространственных координат ВС в интересах повышения их точности в условиях неработоспособности НАП.
Указанный результат достигается тем, что на борту ВС, взаимодействующего с ЛККС, дополнительно формируют оценки собственных пространственных координат в заданной прямоугольной системе координат OXYZ с использованием ИНС, если на этапе определения работоспособности НАП сформировано решение q=1 о том, что НАП работоспособна, то формируют итоговые оценки пространственных координат ВС на основе комплексной обработки информации от НАП и ИНС, в противном случае определяют координаты точки F пересечения характерной сферы S=[O0,R1] и характерного луча L=[Oo, A], где S - сфера с центром в точке Оа и радиусом R1, Oo - точка, координаты которой совпадают с координатами ЛККС, L - луч с началом в точке Oo, проходящий через точку А, координаты которой совпадают со сформированными ИНС оценками пространственных координат ВС, принимают координаты точки F в качестве итоговых оценок пространственных координат ВС.
Сущность изобретения заключается в том, что в случае неработоспособности НАП, итоговые оценки пространственных координат ВС формируются на основе комплексной обработки информации от ЛККС и ИНС, при этом, в качестве итоговых оценок пространственных координат ВС принимаются координаты точки пересечения характерной сферы (характерная сфера - сфера с центром в точке дислокации ЛККС и радиусом, равным оценке расстояния между ВС и ЛККС, определяемой по разнице между моментами приема и передачи дополнительной информационной посылки) и характерного луча (характерный луч - луч с началом в точке дислокации ЛККС, проходящий через точку, координаты которой совпадают со сформированными ИНС оценками пространственных координат ВС). Данная обработка информации позволяет устранить радиальную нестационарную ошибку определения координат ИНС относительно ЛККС и, как следствие, повысить точность определения координат ВС в целом в случае неработоспособности НАП.
Данный способ включает в себя следующие этапы:
1. На стороне наземной стационарной ЛККС, имеющей заранее точно определенные координаты X0=[x0,y0,z0] своей дислокации в заданной прямоугольной системе координат OXYZ:
1.1 Определение моментов времени ti0 передачи дополнительных информационных посылок в соответствии с выражением

где t1 - заданный первый момент времени передачи дополнительной информационной посылки, i=0, 1, 2, 3, …, Δt - установленный интервал времени между моментами времени передачи дополнительных информационных посылок.
1.2 Формирование и передача по радиоканалу в определенные моменты времени ti0 дополнительных информационных посылок Vi=[ti0,x0], содержащих момент времени ti0 передачи данной посылки и пространственные координаты ЛККС х0 в заданной прямоугольной системе координат OXYZ.
2. На борту воздушного судна, взаимодействующего с ЛККС:
2.1 Формирование оценок собственных пространственных координат
XИНС=[xИНС, yИНС,zИНС] в заданной прямоугольной системе координат OXYZ с помощью ИНС.
2.2 Прием и обработка спутниковых сигналов от ГНСС (СРНС) с помощью соответствующей НАП.
2.3 Формирование оценок собственных пространственных координат Xнап=[хНАП,yНАП,zНАП] в заданной прямоугольной системе координат OXYZ с помощью НАП.
2.4 Прием дополнительной информационной посылки Vi=[ti0,x0] и фиксация момента времени ti ее приема.
2.5 Определение первой оценки R1 расстояния между ВС и ЛККС в соответствии с выражением

где С=3⋅108 м/с - скорость распространения радиоволны.
2.6 Определение второй оценки R2 расстояния между ВС и ЛККС в соответствии с выражением
 .
.
2.7 Формирование решения о работоспособности или неработоспособности НАП, в соответствии с выражением
 ,
,
где q=0 - НАП неработоспособна; q=1 - НАП работоспособна, h - заданное пороговое значение.
2.8 Если на этапе определения работоспособности НАП сформировано решение q=1 о том, что НАП работоспособна, то формирование итоговых оценок XBC=[xBC,yBC,zBC] пространственных координат ВС осуществляется на основе комплексной обработки информации от НАП и ИНС, например, в соответствии с выражениями:
где DНАП - дисперсия ошибки определения пространственных координат с использованием НАП; DИНС - дисперсия ошибки определения пространственных координат с использованием ИНС.
2.9 Если на этапе определения работоспособности НАП сформировано решение q=0 о том, что НАП неработоспособна то формирование итоговых оценок пространственных координат воздушного судна осуществляется на основе комплексной обработки информации от ЛККС и ИНС в соответствии с нижеприведенными процедурами 2.9.1-2.9.2:
2.9.1 Определение координат точки F пересечения сферы S=[Oo,R1] и луча L=[Oo,A] (S - сфера с центром в точке Oo и радиусом R1;
Oo - точка, координаты которой совпадают с координатами ЛККС; L - луч с началом в точке Oo, проходящий через точку А, координаты которой совпадают со сформированными ИНС оценками пространственных координат ВС) в соответствии с нижеприведенными процедурами 2.9.1.1-2.9.1.6:
2.9.1.1 Определение расстояния между точками Oo и А в соответствии с выражением
 .
.
2.9.1.2 Определение координат XF1=[xF1,yF1,zF1] точки F1 (F1 - первая точка пересечения сферы S=[Oo,R1] и прямой Р=[Oo, A], где Р - прямая, проходящая через точку Oo и точку А) в соответствии с выражениями:
2.9.1.3 Определение координат XF2=[xF2,yF2,zF2] точки F2 (F2 - вторая точка пересечения сферы S=[Oo,R1] и прямой P=[Oo,A]) в соответствии с выражениями:
2.9.1.4 Определение расстояния R(AF1) между точками А и F1 в соответствии с выражением
 .
.
2.9.1.5 Определение расстояния R(AF2) между точками А и F2 в соответствии с выражением
 .
.
2.9.1.6 Определение координат XF точки F (координаты точки F определяются, как координаты точки F1 или точки F2, удовлетворяющей условию минимума расстояния до точки А, так как именно ближайшая к точке А точка F1 или точка F2 является точкой F пересечения характерной сферы S=[0o,R1] и характерного луча L=[Oo,A]) в соответствии с выражением
 .
.
2.9.2 Принятие координат XF точки F в качестве итоговых оценок XBC=[хBC,yBC,zBC] пространственных координат ВС в соответствии с выражением

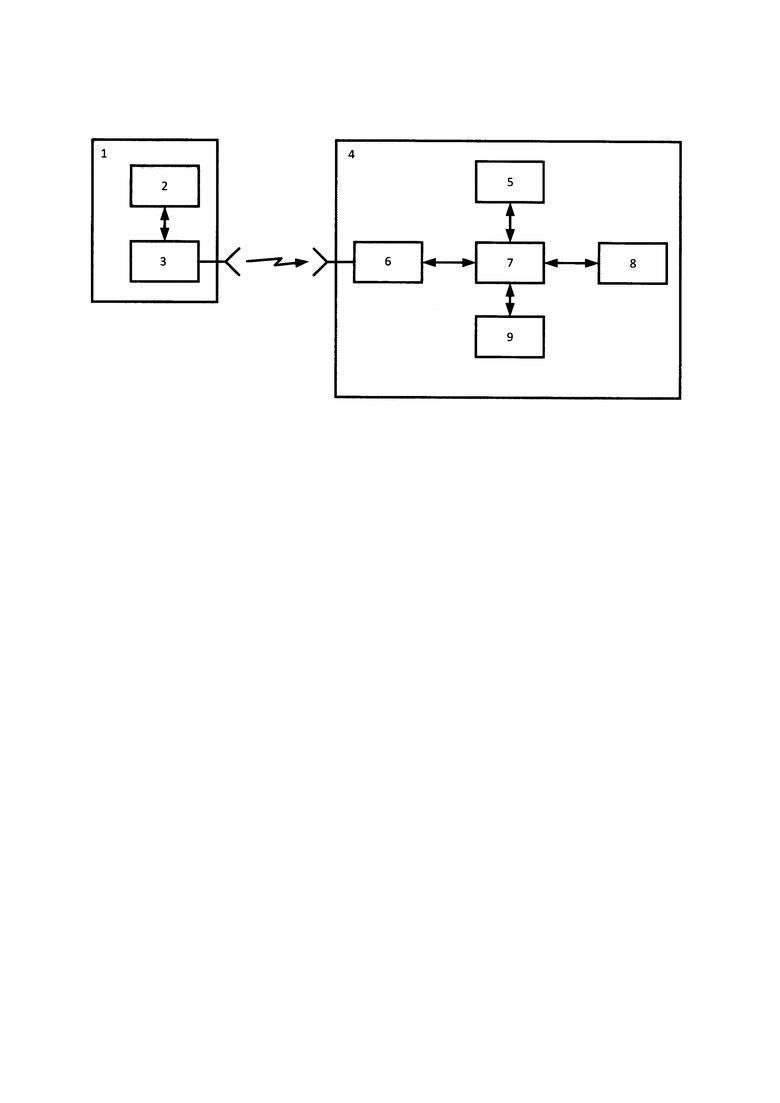
Данный способ может быть реализован, например, с помощью комплекса устройств, структурная схема которого приведена на фигуре 1, где обозначено: 1 - ЛККС; 2 - блок управления (БУ); 3 - аппаратура формирования и передачи дополнительной информационной посылки (АФП ДИП); 4 - ВС, взаимодействующее с ЛККС 1; 5 - НАП; 6 - приемник дополнительной информационной посылки (ПРМ ДИП); 7 - блок управления и обработки информации (БУОИ); 8 - блок контроля работоспособности (БКР) НАП; 9 - ИНС.
БУ 2 предназначен для определения моментов времени ti0 передачи дополнительных информационных посылок в соответствии с выражением (1) и управления АФП ДИП 3. АФП ДИП 3 предназначена для формирования и передачи в определенные моменты времени ti0 дополнительных информационные посылок Vi=[ti0,X0]. НАП 5 предназначена для приема и обработки спутниковых сигналов от ГНСС, а также для формирования оценок XНАП=[хНАП,yНАП,zНАП] пространственных координат ВС в заданной прямоугольной системе координат OXYZ. ПРМ ДИП 6 предназначен для приема дополнительной информационной посылки Vi=[ti0,X0] и фиксации момента времени ti1 ее приема. БУОИ 7 предназначен для управления элементами комплекса на борту ВС 4, обработки информации и формирования итоговых оценок XBC=[xBC,yBC,zBC] пространственных координат ВС. БКР НАП 8 предназначен для контроля работоспособности НАП 5. ИНС 9 предназначена для формирования оценок XИНС=[xИНС,,yИНС,zИНС] пространственных координат ВС в заданной прямоугольной системе координат OXYZ.
Комплекс работает следующим образом. БУ 2 определяет моменты времени ti0 передачи дополнительных информационных посылок в соответствии с выражением (1) и управляет АФП ДИП 3. АФП ДИП 3 формирует и под управлением БУ 2 передает в определенные моменты времени ti0 дополнительные информационные посылки Vi=[ti0,X0]. БУОИ 7 управляет элементами комплекса на борту ВС 4. ПРМ ДИП 6 принимает очередную дополнительную информационную посылку Vi=[ti0,X0] и фиксирует момент времени ti1 ее приема. Величины ti0, X0 и ti1 поступают на БУОИ 7. НАП 5 принимает и обрабатывает спутниковые сигналы от ГНСС, а также формирует оценки XНАП=[xНАП,yНАПz,zНАП] пространственных координат ВС в заданной прямоугольной системе координат OXYZ. Оценки XНАП=[ХНАП,yНАП,zНАП] поступают в БУОИ 7 и через БУОИ 7 также поступают в БКР НАП 8. ИНС 9 формирует оценки XИНС=[xИНС,yИНС,zИНС] пространственных координат ВС в заданной прямоугольной системе координат OXYZ. Оценки XИНС=[xИНС,yИНС,zИНС] поступают в БУОИ 7. БКР НАП 8 контролирует работоспособность НАП 5 и формирует соответствующее решение q о работоспособности или неработоспособности НАП 5 в соответствии с выражениями (2)-(4). Решение q о работоспособности или неработоспособности НАП 5 поступает в БУОИ 7. Если на вход БУОИ 7 с выхода БКР НАП 8 поступает решение q=1 о том, что НАП 5 работоспособна, то БУОИ 7 формирует итоговые оценки XBC=[xBC,yBC,zBC] пространственных координат ВС 4 на основе комплексной обработки информации от НАП 5 и ИНС 9 в соответствии с выражениями (5). Если на вход БУОИ 7 с выхода БКР НАП 8 поступает решение q=0 о том, что НАП 5 неработоспособна, то БУОИ 7 формирует итоговые оценки XBC=[xBC,yBC,zBC] пространственных координат ВС 4 на основе комплексной обработки информации от ЛККС 1 и ИНС 9 в соответствии с выражениями (6)-(12).
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ определения пространственных координат ВС, сущность которого заключается в том, что в случае неработоспособности НАП, итоговые оценки пространственных координат ВС формируются на основе комплексной обработки информации от ЛККС и ИНС, при этом в качестве данных оценок принимаются координаты точки пересечения характерной сферы (характерная сфера - сфера с центром в точке дислокации ЛККС и радиусом, равным оценке расстояния между ВС и ЛККС, определяемой по разнице между моментами приема и передачи дополнительной информационной посылки) и характерного луча (характерный луч -луч с началом в точке дислокации ЛККС, проходящий через точку, координаты которой совпадают со сформированными ИНС оценками пространственных координат ВС).
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что если, в случае неработоспособности НАП, итоговые оценки пространственных координат ВС формировать на основе комплексной обработки информации от ЛККС и ИНС, при этом в качестве данных оценок принимать координаты точки пересечения характерной сферы (характерная сфера - сфера с центром в точке дислокации ЛККС и радиусом, равным оценке расстояния между ВС и ЛККС, определяемой по разнице между моментами приема и передачи дополнительной информационной посылки) и характерного луча (характерный луч - луч с началом в точке дислокации ЛККС, проходящий через точку, координаты которой совпадают со сформированными ИНС оценками пространственных координат ВС), то это приведет к повышению точности определения координат ВС в случае неработоспособности НАП.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств определения пространственных координат воздушного судна (ВС).
Техническим результатом изобретения является расширение функциональных возможностей для определения пространственных координат ВС в интересах повышения их точности в условиях неработоспособности навигационной аппаратуры потребителя (НАП) глобальной навигационной спутниковой системы. В заявленном способе в случае неработоспособности НАП итоговые оценки пространственных координат ВС формируются на основе комплексной обработки информации от локальной контрольно-корректирующей станции (ЛККС) и инерциальной навигационной системы (ИНС). При этом в качестве итоговых оценок пространственных координат ВС принимаются координаты точки пересечения сферы с центром в точке дислокации ЛККС и радиусом, равным оценке расстояния между ВС и ЛККС, определяемой по разнице между моментами приема и передачи дополнительной информационной посылки, и луча с началом в точке дислокации ЛККС, проходящего через точку, координаты которой совпадают со сформированными ИНС оценками пространственных координат ВС. Данная обработка информации позволяет устранить радиальную нестационарную ошибку определения координат ИНС относительно ЛККС и, как следствие, повысить точность определения координат ВС в целом в случае неработоспособности НАП. 1 ил.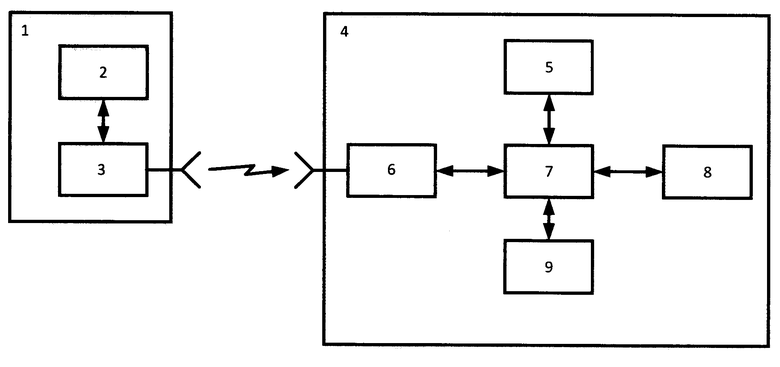
Способ определения пространственных координат воздушного судна (ВС), основанный на том, что на стороне локальной контрольно-корректирующей станции (ЛККС), имеющей заранее точно определенные координаты своей дислокации в заданной прямоугольной системе координат OXYZ, определяют моменты времени передачи дополнительных информационных посылок, формируют и передают по радиоканалу на воздушное судно, взаимодействующее с ЛККС, в определенные моменты времени дополнительные информационные посылки, содержащие момент времени передачи данной посылки и пространственные координаты ЛККС в заданной прямоугольной системе координат OXYZ, на борту ВС, взаимодействующего с ЛККС, формируют оценки собственных пространственных координат в заданной прямоугольной системе координат OXYZ с использованием навигационной аппаратуры потребителя (НАП) глобальной спутниковой навигационной системы, принимают дополнительную информационную посылку и фиксируют момент времени ее приема, определяют первую оценку расстояния R1 между ВС и ЛККС по разнице между моментами приема и передачи дополнительной информационной посылки, определяют вторую оценку расстояния R2 между ВС и ЛККС по пространственным координатам ВС и ЛККС, при этом используют пространственные координаты ЛККС, переданные в дополнительной информационной посылке и сформированные НАП оценки пространственных координат ВС, сравнивают модуль разности оценок расстояний R1 и R2 с заданным пороговым значением h, если модуль разности оценок расстояний R1 и R2 превышает заданное пороговое значение h, то формируют решение q=0 о том, что НАП неработоспособна, в противном случае формируют решение q=1 о том, что НАП работоспособна, отличающийся тем, что на борту ВС, взаимодействующего с ЛККС, дополнительно формируют оценки собственных пространственных координат в заданной прямоугольной системе координат OXYZ с использованием инерциальной навигационной системы (ИНС), если на этапе определения работоспособности НАП сформировано решение q=1 о том, что НАП работоспособна, то формируют итоговые оценки пространственных координат ВС на основе комплексной обработки информации от НАП и ИНС, в противном случае определяют координаты точки F пересечения характерной сферы S=[Oo,R1] и характерного луча L=[Oo,A], где S - сфера с центром в точке Oo и радиусом R1, Oo - точка, координаты которой совпадают с координатами ЛККС, L - луч с началом в точке Oo, проходящий через точку А, координаты которой совпадают со сформированными ИНС оценками пространственных координат ВС, принимают координаты точки F в качестве итоговых оценок пространственных координат ВС.
| СПОСОБ КОНТРОЛЯ ДОСТОВЕРНОСТИ ИНФОРМАЦИИ, ПРИНИМАЕМОЙ НАВИГАЦИОННОЙ АППАРАТУРОЙ ПОТРЕБИТЕЛЯ ВОЗДУШНОГО СУДНА | 2020 |
|
RU2740398C1 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ НАВИГАЦИОННОЙ АППАРАТУРЫ ПОТРЕБИТЕЛЯ СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ ВОЗДУШНОГО СУДНА | 2020 |
|
RU2748558C1 |
| СПОСОБ ПОВЫШЕНИЯ ЦЕЛОСТНОСТИ ИСПОЛЬЗУЕМЫХ СИГНАЛОВ НАВИГАЦИОННЫХ СПУТНИКОВ С ПОМОЩЬЮ ЛОКАЛЬНОЙ КОНТРОЛЬНО-КОРРЕКТИРУЮЩЕЙ СТАНЦИИ (ЛККС) С УЧЕТОМ ВЛИЯНИЯ АНОМАЛЬНОЙ ИОНОСФЕРЫ | 2013 |
|
RU2542326C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО ПОЛОЖЕНИЯ ПРИ МЕЖСАМОЛЕТНОЙ НАВИГАЦИИ | 2016 |
|
RU2624994C1 |
| Способ определения координат воздушного судна в спутниковой-псевдоспутниковой многопозиционной системе наблюдения | 2019 |
|
RU2715059C1 |
| CN 101419275 A, 29.04.2009 | |||
| US 9341718 B2, 17.05.2016 | |||
| CN 105758401 A, 13.07.2016. | |||

