Изобретение относится к машиностроению и приборостроению, а именно к захватным устройствам манипуляторов, а именно для механической сортировки твердых коммунальных отходов.
Предшествующий уровень техники
Из уровня техники известен захват манипулятора (SU863332 A1, опуб. 21.12.1979), губки, на которых установлены тактильные датчики, соединенные через усилитель с системой управления манипулятором, отличающийся тем, что, с целью расширения функциональных возможностей и повышения надежности, тактильные датчики выполнены в виде двух спаев термопар, при этом один спай размещен на рабочей, а другой - на нерабочей поверхностях губок, причем термопары включены по мостовой схеме в два смежных плеча, причем в одну диагональ мостовой схемы включен усилитель, а в другую - дополнительно введенный источник питания, и между усилителем и системой управления дополнительно введено дифференцирующее звено. Материал переносимого объекта определяется по характеру сигнала, снимаемого с дифференцирующего звена через усилитель.
Также из уровня техники известен схват манипулятора (SU1360981 A1, опуб. 16.07.1986), содержащий две губки с приводом их перемещения, каждая из которых имеет призматическую рабочую поверхность, и два вибратора, связанных с рабочими поверхностями губок, образующими одну из граней призмы, отличающийся тем, что, с целью расширения функциональных возможностей путем обеспечения распознавания захваченных деталей при заданной их номенклатуре, он снабжен датчиком силы, расположенным на одной из губок, а каждый вибратор выполнен в виде пьезокерамической пластины, связанной с источником переменного электрического напряжения регулируемой частоты. Сигнал от тензодатчика и значение частоты f, при котором наступило явление резонанса, поступают в блок управления в памяти которого хранятся значения частот собственных колебаний манипулируемых деталей. При совпадении одной из этих частот с поступившим значением частоты осуществляется распознавание детали и выдается сигнал на перемещение схвата с деталью в заданную точку пространства.
Недостатками приведенных выше решений является низкая точность определения материалов в условиях работы с повышенным загрязнением поверхностей схвата и переносимых предметов заранее неизвестных свойств и размеров.
Сущность изобретения
Задачей, на решение которой направлено заявленное изобретение, является усовершенствование методов распознавания материалов твердых коммунальных отходов при механической сортировке с применением систем искусственного компьютерного зрения.
Техническим результатом настоящего изобретения является повышение вероятности точного определения материала сортируемых объектов при помощи косвенного измерения твердости материала объектов, а также снижения влияния на точность определения материалов разнообразными загрязнениями переносимых предметов, разностью температур, наличием влаги.
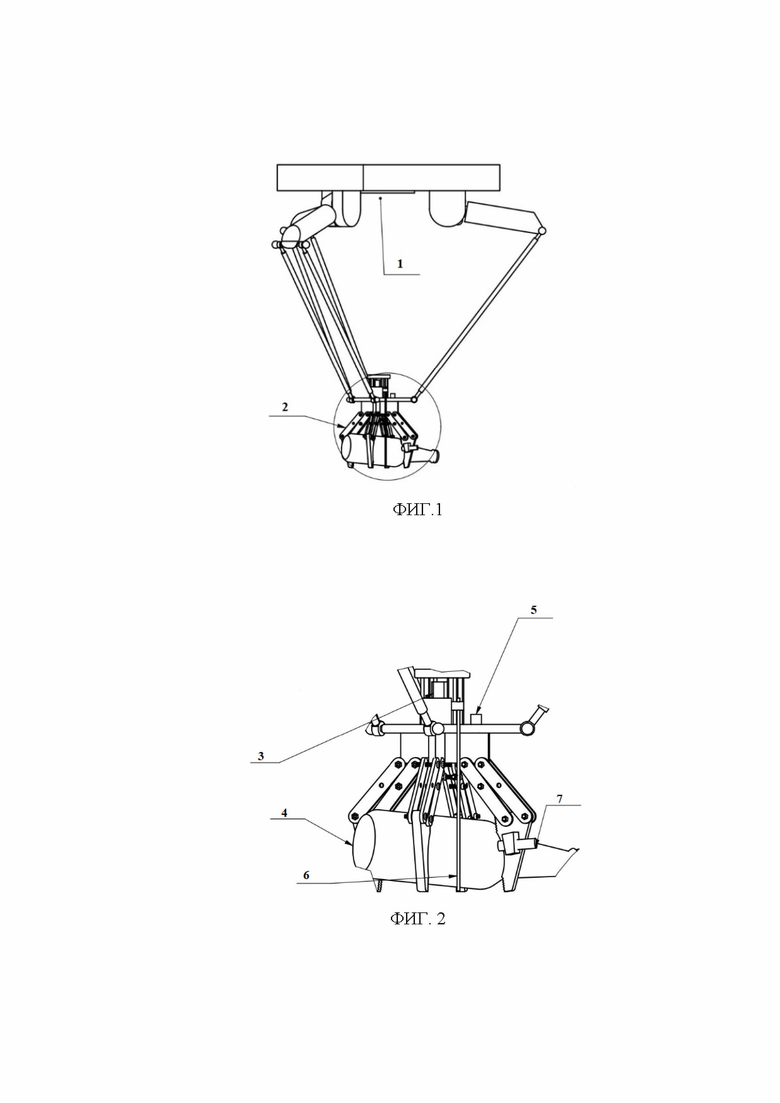
Решение поставленной задачи и технический результат достигается тем, что предлагается захватное устройство, которое включает в себя блок управления и захватную головку, расположенную на механическом приводе, при этом сама захватная головка состоит из по меньшей мере, двух подвижных пальцев захвата с антифрикционным покрытием. При этом, захватная головка также включает в себя микрофон, который расположен в основании захватной головки, металлический стержень, оснащенный механизмом движения, индукционный датчик приближения, который расположен на как минимум одном из пальцев захвата, и оптический датчик приближения.
Механическим приводом, на котором расположена захватная головка, в частном случае, может быть привод типа дельта.
Механизмом движения металлического стержня в частом случае, могут являться пневматический цилиндр или электропривод.
Оптический датчик приближения в частном случае, может быть расположен в основании головки захвата.
Изобретение поясняется чертежами, которые поясняют сущность технического решения:
Фиг. 1. Захватное устройство;
Фиг. 2 Увеличенная часть чертежа захватного устройства.
На фигурах цифрами обозначены следующие конструктивные элементы:
1 - блок управления;
2 - пальцы захвата;
3 - оптический датчик приближения;
4 - один из возможных переносимых объектов;
5 - микрофон;
6 - металлический стержень;
7 - индукционный датчик приближения.
Осуществление изобретения
Устройство захвата работает следующим образом:
Блок управления (1) получает информацию от системы компьютерного искусственного зрения о расположении сортируемого объекта. Перемещает захватное устройство в полученные координаты и запускает цикл захвата, распознавания, и перемещения предмета. Оптический датчик (3) работает по принципу определения уровня отраженного сигнала от поверхности объекта, что позволяет скорректировать высоту срабатывания захвата (2) при опускании вниз.
После захвата предмета, в процессе подъема на некоторую высоту, срабатывает механизм движения металлического стержня (6). При легком ударе металлическим стержнем по переносимому объекту (4) стержень и предмет будут колебаться со своими резонансными частотами, зависящими, в том числе, от формы и материала объектов. Колебания в виде звуковой волны улавливаются микрофоном (5), расположенным на основании захватной головке и передаются в блок управления (1), где производится анализ. Анализ полученного звука производится путем оцифровки с применением микроконтроллеров методом, в частном случае, быстрого преобразования Фурье и определения резонансной частоты колебаний переносимого объекта. При этом заранее известная частота колебаний металлического стержня и колебаний всей конструкции в процессе работы отфильтровываются из полученного спектра частот. По частоте колебаний переносимого предмета можно отличить визуально схожие пластиковые и стеклянные объекты друг от друга, а при срабатывании индукционного датчика (7) - металлические.
Блок управления (1) корректирует траекторию движения захвата с переносимым предметом в зависимости от полученных данных о материале.
Совокупность всех элементов предложенного решения позволяет значительно повысить вероятность точного определения материала твердых коммунальных отходов при механической сортировке в условиях повышенного загрязнения, различных температур, наличия влаги и различных уровнях и свойствах освещения, подтверждает достижение заявленного технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированный модуль для сортировки твердых бытовых отходов | 2023 |
|
RU2815930C1 |
| Интеллектуальная система роботизированной сортировки хаотично расположенных объектов | 2022 |
|
RU2813958C1 |
| Способ сортировки отходов | 2022 |
|
RU2806224C1 |
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ПО СОРТИРОВКЕ ИСПОЛЬЗОВАННОЙ ТАРЫ | 2021 |
|
RU2782408C1 |
| РОБОТИЗИРОВАННЫЙ АВТОМАТИЧЕСКИЙ КОМПЛЕКС ПО СОРТИРОВКЕ ТВЁРДЫХ КОММУНАЛЬНЫХ ОТХОДОВ НА ОСНОВЕ НЕЙРОННЫХ СЕТЕЙ | 2019 |
|
RU2731052C1 |
| КОМПЛЕКС ПЕРЕРАБОТКИ ТВЁРДЫХ КОММУНАЛЬНЫХ ОТХОДОВ С АВТОМАТИЗИРОВАННОЙ СОРТИРОВКОЙ НЕОРГАНИЧЕСКОЙ ЧАСТИ И ПЛАЗМЕННОЙ ГАЗИФИКАЦИЕЙ ОРГАНИЧЕСКОГО ОСТАТКА | 2019 |
|
RU2731729C1 |
| СПОСОБ СОРТИРОВКИ МУСОРА | 2016 |
|
RU2624288C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ СОРТИРОВКИ ПРЕДМЕТОВ | 2009 |
|
RU2423192C1 |
| Способ выполнения манипуляции с объектом | 2019 |
|
RU2800443C1 |
| СПОСОБ И СИСТЕМА ЗАХВАТА ОБЪЕКТОВ С ПОМОЩЬЮ РОБОТИЗИРОВАННОГО УСТРОЙСТВА | 2020 |
|
RU2745380C1 |
Изобретение относится к машиностроению и приборостроению, а именно к захватным устройствам манипуляторов для механической сортировки твердых коммунальных отходов. Захватное устройство содержит блок управления и захватную головку, расположенную на механическом приводе. При этом захватная головка содержит по меньшей мере два подвижных пальца захвата с антифрикционным покрытием, микрофон, который расположен в основании захватной головки, металлический стержень, оснащенный механизмом движения, индукционный датчик приближения, который расположен на как минимум одном из пальцев захвата, и оптический датчик приближения. Обеспечивается повышение точности определения материала сортируемых объектов. 3 з.п. ф-лы, 2 ил.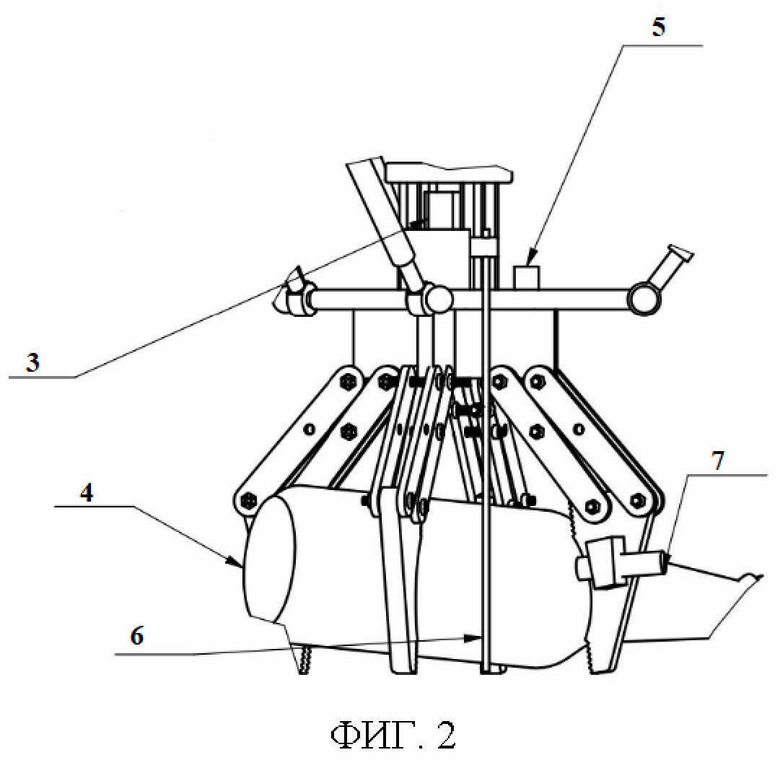
1. Захватное устройство, включающее в себя блок управления и захватную головку, расположенную на механическом приводе, при этом упомянутая захватная головка содержит по меньшей мере два подвижных пальца захвата с антифрикционным покрытием, отличающееся тем, что захватная головка содержит микрофон, расположенный в основании захватной головки, металлический стержень, оснащенный механизмом движения, индукционный датчик приближения, расположенный на как минимум одном из пальцев захвата, и оптический датчик приближения.
2. Захватное устройство по п.1, отличающееся тем, что механический привод, в частном случае, выполнен в виде привода типа дельта.
3. Захватное устройство по п.1 или 2, отличающееся тем, что механизмом движения, в частном случае, является пневматический цилиндр или электропривод.
4. Захватное устройство по любому из пп.1-3, отличающееся тем, что оптический датчик приближения расположен в основании головки захвата.
| Схват манипулятора | 1986 |
|
SU1360981A1 |
| СПОСОБ, КОМПЬЮТЕРНАЯ ПРОГРАММА И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТА ЗАХВАТА | 2011 |
|
RU2594231C2 |
| CN 110222676 A, 10.09.2019 | |||
| WO 2015158962 A1, 22.10.2015 | |||
| УЧЕБНЫЙ ПРИБОР ДЛЯ ДЕМОНСТРАЦИИ ЭЛЕМЕНТОВ ВНЕШНЕЙ БАЛЛИСТИКИ | 1939 |
|
SU59188A1 |
