Изобретение относится к машиностроению и приборостроению, а именно к захватным устройствам манипуляторов, предназначенных для сборочных работ.
Целью изобретения является расширение функциональных возможностей путем обеспечения распознавания захваченных деталей при заданной их номенклатуре.
На фиг. 1 изображен схват, обший вид; на фиг. 2 - узел I на фиг. 1.
Схват содержит привод 1 губок 2, каждая из которых имеет призматическую рабочую поверхность. На одних гранях губок, расположенных друг против друга, установлены вибраторы, .каждый из которых выполнен в виде пьезокерамической пластины 3, связанной электродами 4, которые изолированы от контакта с деталью (не показана) диэлектрической прокладкой 5 с источником переменного электрического напряжения регулируемой частоты (не показан).
На других гранях призмы, образуюших рабочую поверхность губок, установлен датчик силы, например тензодатчик 6 выводами 7, соединенный с блоком измерения (не показан).
Схват работает следуюшим образом.
При сближении губок 2 на пьезокера- мические пластинки 3 подается переменное электрическое напряжение U с частотой f, деталь касается поверхностей губок и благодаря ликвидации силы трения покоя и значительного снижения сил трения скольжения деталь надежно центрируется. После этого частота переменного электрического напряжения f, подаваемая по электродам 4
на пьезокерамические пластинки 3, начинает варьироваться. В момент совпадения текущего значения частоты с частотой собственных колебаний детали наступает явление механического резонанса, которое приводит к появлению «скачка усилия, воспринимаемого с помошью тензодатчика 6.
Сигнал от тензодатчика и значение частоты f, при котором наступило явление резонанса, поступают в блок управления (не показан), в памяти которого хранятся значения частот собственных колебаний мани- пулируемых деталей. При совпадении одной из этих частот с поступившим значением частоты осуществляется распознавание детали и выдается сигнал на перемещение схвата с деталью в заданную точку пространства.
Формула изобретения
Схват манипулятора, содержащий две губки с приводом их перемещения, каждая из которых имеет призматическую рабочую поверхность, и два вибратора, связанных с рабочими поверхностями губок, образующими одну из граней призмы, отличающийся тем, что, с целью расширения функциональных возможностей путем обеспечения распознавания захваченных деталей при заданной их номенклатуре, он снабжен датчиком
силы, расположенным на одной из губок, а каждый вибратор выполнен в виде пьезокерамической пластины, связанной с источником переменного электрического напряжения регулируемой частоты.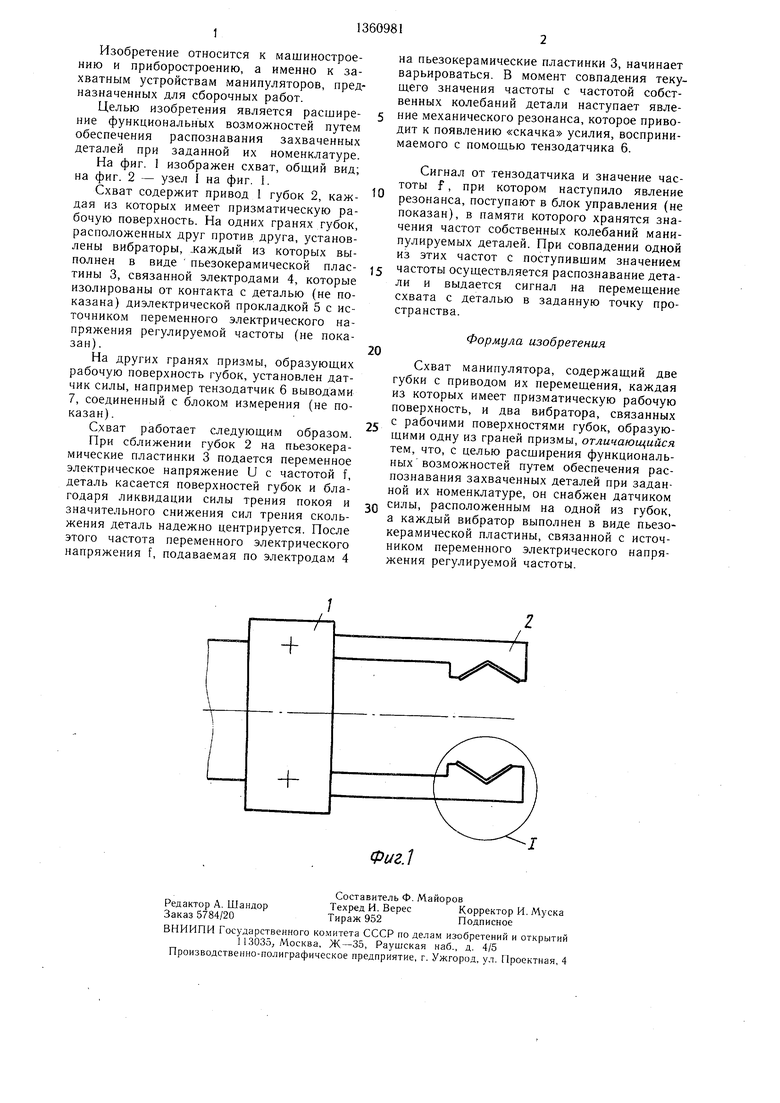
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 2022 |
|
RU2804513C1 |
| Центрирующий схват | 1985 |
|
SU1283093A1 |
| Схват | 1983 |
|
SU1085811A1 |
| Головка манипулятора | 1983 |
|
SU1085807A1 |
| Схват | 1984 |
|
SU1180267A1 |
| Устройство для сборки | 1984 |
|
SU1177113A1 |
| Схват манипулятора для роботизированной сборки сварных конструкций | 1989 |
|
SU1726237A1 |
| Захватное устройство | 1990 |
|
SU1815211A1 |
| Измерительная захватная головка манипулятора | 1987 |
|
SU1393634A1 |
| Устройство управления схватом манипулятора | 1988 |
|
SU1824299A1 |
Изобретение относится к машиностроению и приборостроению, а именно к захватным устройствам манипуляторов, предназначенных для сборочных работ. Целью изобретения является расширение функциональных возможностей за счет обеспечения распознавания захваченных деталей при заданной их номенклатуре. При сближении губок 2 на пьезокерамические пластины 3 вибраторов, установленных на противоположных гранях губок 2, подается переменное электрическое напряжение U частотой f , деталь касается поверхности губок и самоустанавливается. После этого частота переменного напряжения начинает варьироваться и в момент совпадения текущего значения частоты с частотой собственных колебаний детали наступает явление резонанса, которое вызывает скачок сигнала на выходе датчика усилия захвата, например тензодатчика 6. Сигнал от тензодатчика и значение частоты f поступают в блок управления, в полости которого хранится значение частот собственных колебаний манипулируемых деталей. 2 ил. с S СО о: о ) 00 иг.2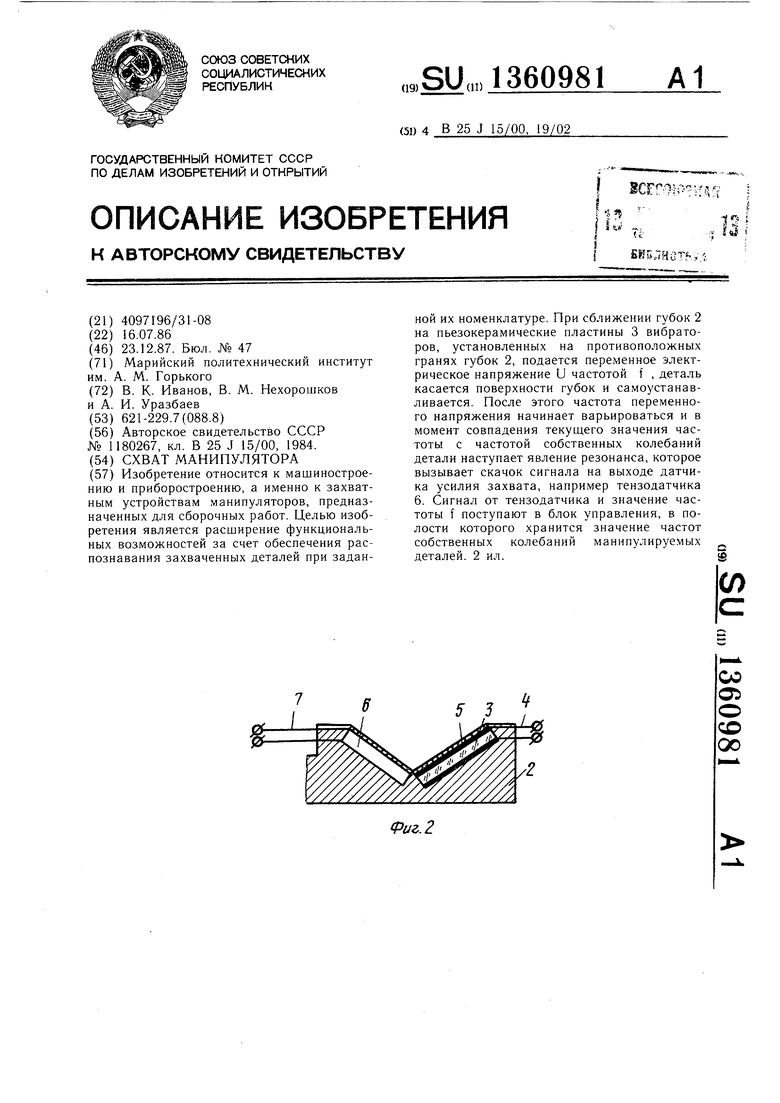
Составитель Ф. Майоров
Редактор А. ШандорТехред И. ВересКорректор И. Муска
Заказ 5784/20Тираж 952Подписное
ВНИИПИ Государственного комитета СССР поделай изобретений и открытий
1 13035, Москва, , Раушская наб., д. 4/5 ПроизБОЛСтвенно-полнграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг.1
| Схват | 1984 |
|
SU1180267A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
