Заявленное изобретение относится к информационным системам в области создания, испытаний и эксплуатации авиационной техники и может быть использовано для синтеза цифрового двойника летательного аппарата (ЛА) из цифровых двойников его составных частей путем организационно-технических мероприятий по управлению информационными потоками и интеграцией вычислительных ресурсов в физические процессы производства, испытаний и эксплуатации летательного аппарата.
В связи с развитием современных информационных технологий расширяется использование возможностей компьютерного моделирования при решении задач разработки, производства, испытаний и эксплуатации авиационной техники. Компьютерные модели становятся одной из форм представления результатов научно-исследовательской и проектно-конструкторской деятельности, активно используемых при создании наукоемкой продукции, к которой относится и авиастроение. Совершенствование вычислительных технологий, применяемых в авиации, идет по пути перехода от анализа отдельных конструктивных элементов к полномасштабному трехмерному анализу поведения летательного аппарата в целом, что позволило активно внедрять технологию цифровых двойников отдельных узлов, агрегатов и систем ЛА, которые по своим характеристикам применимы для всех этапов жизненного цикла ЛА. В соответствии с ГОСТ Р 57700.37-2021 под понятием «цифровой двойник» понимается система, состоящая из цифровой модели изделия и двусторонних информационных связей с изделием и его составными частями, а под цифровой моделью изделия - система математических и компьютерных моделей, а также электронных документов изделия, описывающая структуру, функциональность и поведение вновь разрабатываемого или эксплуатируемого изделия на различных стадиях жизненного цикла, для которой на основании результатов испытаний по ГОСТ 16504 оценена выполнимость предъявляемых к изделию требованиям.
Создание функционального цифрового двойника требует применения современных компьютерных средств и программных продуктов, позволяющих производить решение сопряженных трехмерных задач аэродинамики, гидродинамики, конвективного тепломассопереноса и прочности. Однако, создание цифрового двойника летательного аппарата является сверхсложной задачей, и, исходя из этого, в заявленном изобретении предлагается система, позволяющая синтезировать ЦД ЛА из цифровых двойников его составных частей (узлов, систем и агрегатов и т.д.). В соответствии с ГОСТ 2.101-2016 под понятием «составная часть изделия» (СЧ) понимается изделие, выполняющее определенные функции в составе другого изделия. СЧ может быть любым видом изделия по конструкторско-функциональным характеристикам (деталь, сборочная единица, комплекс и комплект). При этом важно обеспечить проверку адекватности модели реальным объектам, использующихся в виртуальных экспериментах -процедуру валидации (ГОСТ Р 57700.25-2020).
Обеспечение возможности синтеза цифрового двойника летательного аппарата (ЦД ЛА) из цифровых двойников его составных частей (ЦД СЧ ЛА) состоит в технической возможности объединения ЦД СЧ ЛА в единый функциональный ЦД ЛА. При этом ЦД ЛА должен обеспечивать заданный уровень адекватности реальному физическому объекту - летательному аппарату.
В предложенном изобретении задачу синтеза ЦД ЛА предлагается решать путем применения технологий киберфизических систем, представляющих собой организационно-техническую концепцию управления информационными потоками и интеграции вычислительных ресурсов в физические процессы жизненного цикла образца авиационной техники. В такой системе датчики, контроллеры и информационные системы объединяются в единую сеть. В соответствии с ПНСТ 417-2020 под понятием «киберфизическая система» понимается интеллектуальная система, которая включает в себя инженерные взаимодействующие сети физических и вычислительных компонентов.
Заявленное изобретение построено с учетом рекомендаций ГОСТ Р 57700.37-2021, в соответствии с требованиями которого программно-технологическая платформа цифровых двойников должна включать средства управления программным обеспечением компьютерного моделирования; средства сбора, обработки, анализа, визуализации, каталогизации, хранения, передачи компьютерных моделей и результатов компьютерного моделирования; средства отслеживания всех изменений конструкторских, технологических решений и модификации компьютерных моделей и вариантов инженерных расчетов; средства оформления результатов; средства защиты данных и организации совместной работы участников проекта в соответствии с правами доступа; средства компьютерного моделирования для планирования применения изделия по назначению, поддержки его технического обслуживания и ремонта.
При этом, наиболее близким аналогом, известным из уровня техники, является изобретение «Контекстный цифровой двойник» (патент на изобретение US 20190138970 A1), включающий вычислительную систему, содержащую: процессор, сконфигурированный для запуска цифрового двойника, который содержит виртуальное представление актива и который выполняется на основе данных, связанных с активом, определяет операционное событие, которое произошло в отношении актива, на основе выполнения цифрового двойника актива, идентифицировать предыдущие операционные события, которые произошли и которые связаны с определенным операционным событием, и создать контекст для определенного операционного события на основе предыдущих операционных событий; и выход, сконфигурированный для вывода информации для отображения о сгенерированном контексте определенного рабочего события на устройство отображения; энергонезависимый машиночитаемый носитель, на котором хранятся инструкции, выполнение которых приводит к выполнению компьютером способа, включающего: выполнение цифрового двойника, который содержит виртуальное представление актива, при этом цифровой двойник выполняется на основе данных, связанных с активом; определение операционного события, произошедшего в отношении актива, на основе исполнения цифрового двойника актива; идентификацию предыдущих операционных событий, которые произошли и которые относятся к определенному рабочему событию, и создание контекста для определенного рабочего события на основе предыдущих рабочих событий; и вывод информации для отображения о сгенерированном контексте определенного рабочего события на устройство отображения; реализуемый компьютером способ, включающий: выполнение цифрового двойника, который содержит виртуальное представление актива, при этом цифровой двойник выполняется на основе данных, связанных с активом; определение операционного события, произошедшего в отношении актива, на основе исполнения цифрового двойника актива; идентификацию предыдущих операционных событий, которые произошли и которые относятся к определенному рабочему событию, и создание контекста для определенного рабочего события на основе предыдущих рабочих событий; и вывод информации для отображения о сгенерированном контексте определенного рабочего события на устройство отображения.
Недостатком этого решения является то, что система, в силу ограниченных функциональных возможностей в части уточнения и валидации компьютерных моделей, входящих в цифровой двойник летательного аппарата, не быть использована напрямую для синтеза цифрового двойника ЛА из ЦД СЧ.
Технической задачей заявленного изобретения является расширение арсенала устройств, применяемых для внедрения технологии цифровых двойников в авиации.
Решение технической задачи достигается тем, что киберфизическая система синтеза цифрового двойника летательного аппарата включает блоки измерений физических значений параметров систем, узлов и агрегатов летательного аппарата от 1 до N, выходы которых соединены со входами бортового измерителя от 1 до N соответственно; бортовой измеритель, первый вход-выход которого соединен с первым входом-выходом блока приема-передачи данных, второй вход-выход ботового измерителя соединен с первым входом-выходом наземного комплекса обработки полетной информации, третий вход-выход ботового измерителя соединен с входом выходом бортового съемного носителя информации; блок приема-передачи данных, второй вход-выход которого соединен с первым входом-выходом коммутатора беспроводной системы передачи данных, третий вход-выход блока приема-передачи данных соединен с входом-выходом бортовой системы валидации; наземный комплекс обработки полетной информации, второй вход-выход которого соединен с входом-выходом блока хранения первичной полетной информации, третий вход-выход наземного комплекса обработки полетной информации соединен со вторым входом-выходом коммутатора беспроводной системы передачи данных, четвертый вход-выход наземного комплекса обработки полетной информации соединен с первым входом-выходом блока идентификации, обработки и анализа; блок идентификации, обработки и анализа, второй вход-выход которого соединен с шестым входом-выходом коммутатора беспроводной системы передачи данных, третий вход-выход блока идентификации, обработки и анализа соединен с входом-выходом блока хранения информации «Результаты», четвертый вход-выход блока идентификации, обработки и анализа соединен с входом-выходом блока протоколирования и визуализации результатов; коммутатор беспроводной системы передачи данных, третий вход-выход которого соединен с первым входом-выходом блока управления, четвертый вход-выход коммутатора беспроводной системы передачи данных соединен с первым входом-выходом блока контроля изменений и модификации цифрового двойника, пятый вход-выход коммутатора беспроводной системы передачи данных соединен с первым входом-выходом валидатора цифрового двойника; локальной вычислительной сети, первый порт подключения которой соединен с первым входом-выходом модуля численного моделирования «Гидрогазодинамика», второй порт подключения локальной вычислительной сети соединен с первым входом-выходом модуля численного моделирования «Прочность», третий порт подключения локальной вычислительной сети соединен с первым входом-выходом модуля численного моделирования «Теплопроводность», четвертый порт подключения локальной вычислительной сети соединен с первым входом-выходом модуля численного моделирования «Электромагнетизм», пятый порт подключения локальной вычислительной сети соединен с первым входом-выходом блока управления хранилищами цифровых двойников, шестой порт подключения локальной вычислительной сети соединен с входом-выходом высокопроизводительной вычислительной системы, седьмой порт подключения локальной вычислительной сети соединен с входом-выходом блока хранения информации «Материалы», восьмой порт подключения локальной вычислительной сети соединен с входом-выходом блока хранения информации «Среда», девятый порт подключения локальной вычислительной сети соединен со вторым входом-выходом валидатора цифрового двойника, десятый порт подключения локальной вычислительной сети соединен со вторым входом-выходом блока контроля изменений и модификации цифрового двойника, одиннадцатый порт подключения локальной вычислительной сети соединен со вторым входом-выходом блока управления, двенадцатый порт подключения локальной вычислительной сети соединен с входом-выходом модуля функционального моделирования, тринадцатый порт подключения локальной вычислительной сети соединен с входом-выходом модуля численного моделирования связанных задач; модуль численного моделирования «Гидрогазодинамика», второй вход-выход которого соединен с первым выходом модуля построения дискретной модели; модуль численного моделирования «Прочность», второй вход-выход которого соединен со вторым выходом модуля построения дискретной модели; модуль численного моделирования «Теплопроводность», второй вход-выход которого соединен с третьим выходом модуля построения дискретной модели; модуль численного моделирования «Электромагнетизм», второй вход-выход которого соединен с четвертым выходом модуля построения дискретной модели; модуль построения дискретной модели, пятый вход-выход которого соединен с первым входом-выходом модуля построения геометрической модели; модуль построения геометрической модели, второй вход-выход которого соединен с первым входом-выходом модуля построения структурной модели; модуль построения структурной модели, второй вход-выход которого соединен со вторым входом-выходом блока управления хранилищами цифровых двойников, третий вход-выход модуля построения структурной модели соединен с входом-выходом блока хранения информации «Конструкторская документация»; блок управления хранилищами цифровых двойников, третий вход-выход которого соединен с входом-выходом блока хранения информации «Цифровой двойник», входы-выходы для связи с хранилищами цифровых двойников от 1 до N блока управления хранилищами цифровых двойников соединены с входами-выходами блоков хранения информации цифровых двойников от 1 до N соответственно.
Технический результат, достигаемый совокупностью признаков заявленного изобретения, заключается в обеспечении возможности синтеза цифрового двойника летательного аппарата из цифровых двойников его составных частей.
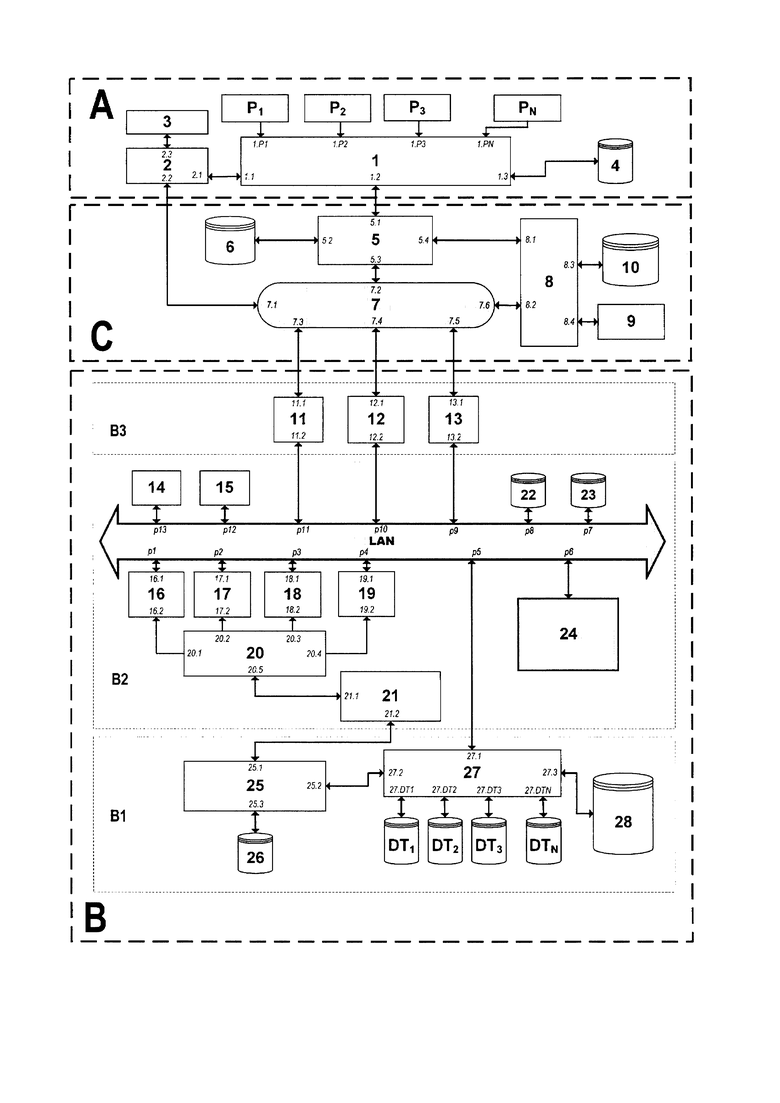
Функционирование заявленного изобретения иллюстрируется фигурой, на которой обозначены:
Контур А - контур технических средств бортовых измерений, расположенных на борту летательного аппарата;
Контур В - контур технических средств цифрового двойника;
Контур В1 - технические средства формирования и хранения ЦД;
Контур В2 - технические средства моделирования;
Контур В3-технические средства управления, контроля и валидации ЦД;
Контур С - контур технических средств наземной обработки и анализа полетной информации;
Р1 Р2, Р3, …- PN - блоки измерений физических значений параметров систем, узлов и агрегатов летательного аппарата, для которых сформированы соответствующие цифровые двойники, размещенные в блоках хранения информации DT1, DT2, DT3, … DTN
N - количество составных частей летательного аппарата (систем, узлов, агрегатов), которые позволяют синтезировать функциональный цифровой двойник летательного аппарата с заданным уровнем адекватности;
1 - бортовой измеритель;
1.1, 1.2, 1.3 - первый, второй и третий вход-выход бортового измерителя соответственно;
1.Р1, 1.Р2, 1.P3…1.PN - вход бортового измерителя от 1 до N соответственно;
2 - блок приема-передачи данных;
2.1, 2.2, 2.3 - первый, второй и третий вход-выход блока приема-передачи данных соответственно;
3 - бортовая система валидации;
4 - бортовой съемный носитель информации;
5 - наземный комплекс обработки полетной информации;
5.1, 5.2, 5.3, 5.4 - первый, второй, третий и четвертый вход-выход наземного комплекса обработки полетной информации соответственно;
6 - блок хранения первичной полетной информации;
7 - коммутатор беспроводной системы передачи данных;
7.1, 7.2, 7.3, 7.4, 7.5, 7.6 - первый, второй, третий, четвертый, пятый и шестой вход-выход коммутатора беспроводной системы передачи данных соответственно;
8 - блок идентификации, обработки и анализа;
8.1, 8.2, 8.3, 8.4 - первый, второй, третий, четвертый вход-выход блока идентификации, обработки и анализа соответственно;
9 - блок протоколирования и визуализации результатов;
10 - блок хранения информации «Результаты»;
11 - блок управления;
11.1, 11.2 - первый и второй вход-выход блока управления соответственно;
12 - блок контроля изменений и модификации цифрового двойника;
12.1, 12.2 - первый и второй вход-выход блока контроля изменений и модификации цифрового двойника соответственно;
13 - валидатор цифрового двойника;
13.1, 13.2 - первый и второй вход-выход валидатора цифрового двойника соответственно;
14 - модуль численного моделирования связанных задач;
15 - модуль функционального моделирования;
16 - модуль численного моделирования «Гидрогазодинамика»;
16.1, 16.2 - первый и второй вход-выход модуля численного моделирования «Гидрогазодинамика» соответственно;
17 - модуль численного моделирования «Прочность»;
17.1, 17.2 - первый и второй вход-выход модуля численного моделирования «Прочность» соответственно;
18 - модуль численного моделирования «Теплопроводность»;
18.1, 18.2 - первый и второй вход-выход модуля численного моделирования «Теплопроводность» соответственно;
19 - модуль численного моделирования «Электромагнетизм»;
19.1, 19.2 - первый и второй вход-выход модуля численного моделирования «Электромагнетизм» соответственно;
20 - модуль построения дискретной модели;
20.1, 20.2, 20.3, 20.4 - первый, второй, третий, четвертый выход модуля построения дискретной модели соответственно;
20.5 - пятый вход-выход модуля построения дискретной модели;
21 - модуль построения геометрической модели;
21.1, 21.2 - первый и второй выход-выход модуля построения геометрической модели соответственно;
22 - блок хранения информации «Среда»;
23 - блок хранения информации «Материалы»;
24 - высокопроизводительная вычислительная система (СВС);
25 - модуль построения структурной модели;
25.1, 25.2, 25.3 - первый, второй и третий вход-выход модуля построения структурной модели соответственно;
26 - блок хранения информации «Конструкторская документация»;
27 - блок управления хранилищами цифровых двойников;
27.1, 27.2, 27.3 - первый, второй и третий вход-выход блока управления хранилищами цифровых двойников соответственно;
27.DT1, 27.DT2, 27.DT3, 27.DTN - вход-выход блока управления хранилищами цифровых двойников от 1 до N соответственно;
28 - блок хранения информации «Цифровой двойник»;
LAN - (англ. Local Area Network) локальная вычислительная сеть (ЛВС);
p1-p13 - порт подключения локальной вычислительной сети от 1 до 13 соответственно;
DT1, DT2, DT3, … DTN - блоки хранения информации цифровых двойников, соответствующих реальным физическим объектам: системам, узлам или агрегатам летательного аппарата от 1 до N.
Блок 1 - бортовой измеритель, представляет собой бортовую информационно-измерительную систему, предназначенную для получения в условиях полета измерительной информации, характеризующей состояние и работу агрегатов и узлов ЛА (P1, Р2, Р3, … PN)) взаимодействие составных частей ЛА между собой и средой. Бортовой измеритель включает следующие элементы: первичные измерительные преобразователи, воспринимающие физические воздействия от и преобразующие их в электрический сигнал; согласующее устройство, осуществляющее преобразование сигналов в вид, необходимый для регистрации, средства синхронизации, обеспечивающие привязку к единому времени всех потоков регистрируемой информации. Блок 1 может быть реализован в рамках известного технического решения: https://konved.ru/.
Блок 2 - блок приема-передачи данных, представляет собой устройство, осуществляющее обмен информацией с блоком 7 по каналам сотовой связи (может быть выполнен в рамках известного технического решения https://business.gogoair.com/solutions/), спутниковой связи (может быть выполнен в рамках известного технического решения https://www.steccom.ru/technology/), по каналам ботовых систем передачи информации, входящих в состав штатных средств связи и систем передачи данных ЛА (применяемые для этого технические решения определяются составом штатного бортового оборудования, установленного на ЛА).
Блок 3 - бортовая система валидации, представляет собой устройство для сбора и обработки полетной информации для распознавания и идентификации испытательных и валидационных режимов при проведении летных испытаний, может выть реализовано по техническому решению: патент № RU 212024 U1, Бортовая система сбора и обработки полетной информации для распознавания и идентификации испытательных и валидационных режимов при проведении летных испытаний / Солдатов А.С; №2022112001; заявл. 04.05.2022; опубл. 04.07.2022, Бюл. №19.
Блок 4 - бортовой съемный носитель информации, представляет собой блок с энергонезависимой памятью, выполнен в металлическом защищенном корпусе. Блок предназначен для хранения параметров полета, полученных от блока 1 и переноса информации в наземное устройство обработки информации по проводному USB интерфейсу.
Блок 5 - наземный комплекс обработки полетной информации, представляет собой вычислительный модуль на основе микропроцессора с предустановленной операционной системой и специальным программным обеспечением комплексной обработки измерительной информации при летных испытаниях авиационной техники, осуществляющий автоматизированную обработку материалов системы бортовых измерений по алгоритмам, изложенным в [Пашковский, И.М. Летные испытания самолетов и обработка результатов испытаний / И.М. Пашковский, В.А. Леонов, Б.К. Поплавский. М.: Машиностроение, 1985. 415 с]. Управление модулем осуществляется с терминала пользователя.
Блок 6 - блок хранения первичной полетной информации, представляет собой хранилище, содержащее массив жестких дисков (HDD или SSD), контроллер дискового массива, внешний корпус и блок питания.
Блок 7 - коммутатор беспроводной системы передачи данных, представляет собой шлюз, осуществляющий организацию межсетевого взаимодействия по протоколам интернета вещей (англ. - Internet of Things IoT) между блоками 2, 5, 8, 11, 12 и 13. Может быть выполнен на основе известного технического решения https://www.plcsystems.ru/catalog/womaster/section.php?SECTION_ID=895.
Блок 8 - блок идентификации, обработки и анализа, представляет собой вычислительный модуль на основе микропроцессора с предустановленной операционной системой и специальным программным обеспечением. Управление модулем осуществляется с терминала пользователя. Блок осуществляет автоматизированную обработку результатов математического моделирования, полученных от цифрового двойника и от реального физического объекта - летательного аппарата по алгоритмам, изложенным в [Румшинский Л.З. Математическая обработка результатов эксперимента М.: Наука, 1971. 192 с], а также для управления режимами ЛА и ЦД.
Блок 9 - блок протоколирования и визуализации результатов, представляет собой вычислительный модуль на основе микропроцессора с предустановленной операционной системой и специальным программным обеспечением. Управление модулем осуществляется с терминала пользователя, для документирования результатов оснащается печатающим устройством. Блок осуществляет функции визуализации и протоколирования результатов обработки информации, поступающей от ЛА и ЦД ЛА, а также обеспечивает организацию разделенного доступа к результатам для различных групп пользователей в зависимости от уровня доступа.
Блок 10 - блок хранения информации «Результаты», представляет собой хранилище информации, содержащее массив жестких дисков (HDD или SSD), контроллер дискового массива, внешний корпус и блок питания.
Блок 11 - блок управления, представляет собой вычислительный модуль на основе микропроцессора с предустановленной операционной системой и специальным программным обеспечением. Управление модулем осуществляется с терминала пользователя. Блок осуществляет функции, связанные с формированием исходных данных эксперимента, задания граничных условий моделирования.
Блок 12 - блок контроля изменений и модификации цифрового двойника, представляет собой вычислительный модуль на основе микропроцессора с предустановленной операционной системой и специальным программным обеспечением. Управление модулем осуществляется с терминала пользователя. Блок осуществляет функции, связанные с контролем соответствия состава ЦД ЛА реальному экземпляру ЛА. Может быть выполнен в соответствии с техническим решением, изложенным в заявке на изобретение №2023101435 от 24.01.2023 г. (Солдатов А.С.Система контроля состава и характеристик оборудования летательного аппарата для обеспечения функционирования его цифровых двойников).
Блок 13 - валидатор цифрового двойника, представляет собой вычислительный модуль на основе микропроцессора с предустановленной операционной системой и специальным программным обеспечением. Управление модулем осуществляется с терминала пользователя. Блок осуществляет процедуру валидации входящих в состав ЦД компьютерных моделей путем проведения валидационного сравнения и оценки соответствия компьютерной модели объекту моделирования по алгоритмам, изложенным в [Забелин А.В., Пыхалов А.А. Валидация конечно-элементных моделей и алгоритм ее реализации // Вестник Пермского национального исследовательского политехнического университета. Механика. 2017. №3. С. 216-233].
Блок 14 - модуль численного моделирования связанных задач, представляет собой вычислительный модуль на основе микропроцессора с предустановленной операционной системой и специальным программным обеспечением. Управление модулем осуществляется с терминала пользователя. Модуль предназначен для проведения сквозного мультифизичного моделирования на основе связанных, сопряженных и поэтапных расчетов, параметрических и оптимизационных исследований по встроенному в программное обеспечение алгоритмам, изложенным в [http://cit.bsau.ru/netcat_files/File/CIT/manuals/ANSYS.pdf] и в [Ермаков, А.И. Решение сопряженных задач и моделирование деформирования элементов двигателей в программном комплексе ANSYS [Электронный ресурс]: электрон, учеб. пособие / А. И. Ермаков, А. О. Шкловец; Минобрнауки России, Самара. гос.аэрокосм, ун-т им. акад. С.П. Королева (нац. исслед. ун-т). - Самара, 2011]. Ключевой задачей модуля является обмен данными между модулями 16, 17, 18 и 19 при совместном моделировании. В качестве специального программного обеспечения может быть использовано одно из известных программных решений: «Логос Платформа» из пакета программ ЛОГОС (ФГУП «РФЯЦ-ВНИИЭФ») (http://logos.vniief.ru/products/platfbrma/); COMSOL Multiphysics (https://www.comsol.ru/comsol-multiphysics) и др.
Блок 15 - модуль функционального моделирования, представляет собой вычислительный модуль на основе микропроцессора с предустановленной операционной системой и специальным программным обеспечением. Управление модулем осуществляется с терминала пользователя. Модуль предназначен для исследования и анализа нестационарных процессов в ЦД ЛА путем создания комплексной модели функционирования ЦД ЛА, для чего проектируются логико-динамические системы, описываемых во входо-выходных отношениях, в виде систем обыкновенных дифференциальных уравнений и/или дифференциально-алгебраических уравнений (https://digitaltwin.ru/wp-content/uploads/2022/09/SimInTech-rus.pdf). В качестве специального программного обеспечения может быть использовано одно из известных программных решений: SimlnTech (https://simintech.ru/), Simulink (https://www.mathworks.com/products/simulink.html), Ansys Twin Builder (https://www.ansys.com/products/digital-twin/ansys-twin-builder) и др.
Блок 16 - модуль численного моделирования «Гидрогазодинамика», представляет собой вычислительный модуль на основе микропроцессора с предустановленной операционной системой и специальным программным обеспечением. Управление модулем осуществляется с терминала пользователя. Модуль предназначен для численного моделирования задач аэродинамики ЦД ЛА путем выполнения вычислений по встроенному в программное обеспечение алгоритмам, изложенным в [Павловский В.А., Никущенко Д.В Вычислительная гидродинамика. Теоретические основы. СПб. Лань, 2018. 368 с.]. В качестве специального программного обеспечения может быть использовано одно из известных программных решений: «Логос Аэро-Гидро» из пакета программ ЛОГОС (ФГУП «РФЯЦ-ВНИИЭФ») (http://logos.vniief.ru/products/aerodynamics/), ANSYS Fluent (https://www.ansys.com/products/fluids/ansys-fluent) и др.
Блок 17 - модуль численного моделирования «Прочность», представляет собой вычислительный модуль на основе микропроцессора с предустановленной операционной системой и специальным программным обеспечением. Управление модулем осуществляется с терминала пользователя. Модуль предназначен для численного моделирования задач прочности ЦД ЛА путем выполнения вычислений по встроенному в программное обеспечение алгоритмам, изложенным в [Когаев В.П. Расчеты на прочность при напряжениях, переменных во времени / В.П. Когаев; под ред. А.П. Гусенкова. - 2-е изд., перераб. и доп.М.: Машиностроение, 1993. 354 с.]. В качестве специального программного обеспечения может быть использовано одно из известных программных решений: «Логос Прочность» из пакета программ ЛОГОС (ФГУП «РФЯЦ-ВНИИЭФ») (http://logos.vniief.ru/products/strength/), ANSYS Mechanical (https://www.ansys.com/products/structures/ansys-mechanical) и др.
Блок 18 - модуль численного моделирования «Теплопроводность», представляет собой вычислительный модуль на основе микропроцессора с предустановленной операционной системой и специальным программным обеспечением. Управление модулем осуществляется с терминала пользователя. Модуль предназначен для численного моделирования задач теплопроводности, излучения и фазовых переходов в твердых телах и неподвижных средах ЦД ЛА путем выполнения вычислений по встроенному в программное обеспечение алгоритмам, изложенным в [Савельева И.Ю., Станкевич И.В. Математическое моделирование процессов теплопроводности методом конечных элементов. Изд. МГТУ им. Н.Э. Баумана, 2019, 176 с.]. В качестве специального программного обеспечения может быть использовано одно из известных программных решений: «Логос Тепло» из пакета программ ЛОГОС (ФГУП «РФЯЦ-ВНИИЭФ») (http://logos.vniief.ru/products/heat/), ANSYS Mechanical (https://www.ansys.com/products/structures/ansys-mechanical) и др.
Блок 19 - модуль численного моделирования «Электромагнетизм», представляет собой вычислительный модуль на основе микропроцессора с предустановленной операционной системой и специальным программным обеспечением. Управление модулем осуществляется с терминала пользователя. Модуль предназначен для численного моделирования электродинамического, электромагнитного, схемотехнического и теплового инженерного анализа для микроэлектронных, электро- и радиотехнических компонентов, устройств и систем. В качестве специального программного обеспечения может быть использовано одно из известных программных решений: GAMMA (https://iskra-tech.ru/rossijskie-cae-sistemy-dlya-resheniya-inzhenemykh-zadach/elektromagnetizm/gamma/), комплекс ANSYS Electronics (https://www.ansys.com/products/electronics) и др.
Блок 20 - модуль построения дискретной модели, представляет собой микропроцессор со специальным программным обеспечением и терминалом пользователя. Модуль предназначен для создания сеточной модели для многодисциплинарных расчетов. В качестве специального программного обеспечения может быть использовано одно из известных программных решений: «Логос Препост» из пакета программ ЛОГОС (ФГУП «РФЯЦ-ВНИИЭФ») (http://logos.vniief.ru/products/prepost/), ANSYS Meshing (https://www.ansys.com/products/meshing) и др.
Блок 21 - модуль построения геометрической модели, представляет собой микропроцессор со специальным программным обеспечением и терминалом пользователя. Модуль предназначен для построения трехмерной модели ЦД. В качестве специального программного обеспечения может быть использовано одно из известных программных решений: КОМПАС-3D (https://kompas.ru/kompas-3d/about/), SOLIDWORKS Desktop 3D CAD (https://www.solidworks.com/domain/design-engineering), NX CAD (Siemens Digital Industries Software) (https://siemens-nx.syssoft.ru/) и др.
Блок 22 - блок хранения информации «Среда», представляет собой хранилище, содержащее массив жестких дисков (HDD или SSD), контроллер дискового массива, внешний корпус и блок питания. Хранилище предназначено для хранения и организации доступа к параметрам твердых, жидких и газообразных сред, используемых при моделировании различных физических процессов (плотность, вязкость, текучесть, электропроводность и т.п.).
Блок 23 - блок хранения информации «Материалы», представляет собой хранилище, содержащее массив жестких дисков (HDD или SSD), контроллер дискового массива, внешний корпус и блок питания. Хранилище предназначено для хранения и организации доступа к характеристикам конструкционных материалов (предел прочности, предел текучести, температура плавления, рабочая температура и т.д.), используемых при моделировании.
Блок 24 - высокопроизводительная вычислительная система (СВС) (англ. High Performance Computing, НРС), построенная в формате вычислительного кластера (группа серверов, соединенных с помощью скоростной сети и использующих специализированное программное обеспечение). Серверы взаимодействуют между собой для увеличения доступной памяти и количества процессоров, используемых для решения задачи. В состав СВС входят: вычислительный узел кластера, представляющий собой сервер на базе многоядерных процессоров; управляющий узел кластера, представляющий собой высокопроизводительный сервер, выполняющий функции планирования и мониторинга; блок коммутации, обеспечивающий высокую скорость передачи данных между узлами, система хранения данных, для хранения промежуточных данных, получаемых в ходе вычислений; система охлаждения и система обеспечения бесперебойного питания. Система может быть построена на базе известного технического решения (https://www.karma-group.ru/catalog/huawei_mission_critical_servers/server-huawei-kunlun/kunlun-9008-V5/).
Блок 25 - модуль построения структурной модели, представляет собой микропроцессор со специальным программным обеспечением и терминалом пользователя. Модуль предназначен для построения двумерных и трехмерных геометрических моделей узлов, агрегатов и систем ЦД ЛА по конструкторской документации, хранящейся в блоке 25. Также в модуле осуществляется корректировка структурной модели и отслеживаются все изменения, вносимые в конструкторскую документацию. В качестве специального программного обеспечения может быть использовано одно из известных программных решений: КОМПАС-3D (https://kompas.ru/kompas-3d/about/), SOLID WORKS Desktop 3D CAD (https://www.solidworks.com/domain/design-engineering), NX CAD (Siemens Digital Industries Software) (https://siemens-nx.syssoft.ru/) и др.
Блок 26 - блок хранения информации «Конструкторская документация», представляет собой хранилище, содержащее массив жестких дисков (HDD или SSD), контроллер дискового массива, внешний корпус и блок питания. В блоке хранится оцифрованная конструкторская документация ЛА.
Блок 27 - блок управления хранилищами цифровых двойников, представляет собой микропроцессор со специальным программным обеспечением и терминалом пользователя. Блок предназначен для организации доступа к блокам хранения информации цифровых двойников, соответствующих реальным физическим объектам: системам, узлам или агрегатам летательного аппарата P1, Р2, Р3, … PN.
Блок 28 - блок хранения информации «Цифровой двойник», представляет собой хранилище, содержащее массив жестких дисков (HDD или SSD), контроллер дискового массива, внешний корпус и блок питания. Блок предназначен для хранения компьютерных моделей и результатов моделирования цифровых двойников DT1, DT2, DT3, … DTN и ЦД ЛА в целом, на основе результатов моделирования в блоках 13-18.
LAN - локальная вычислительная сеть, построенная по технологии Ethernet (стандарты IEEE 802.3), к которой через порты p1-p13 соединительными кабелями типа витая пара (cat.8) через разъемы RJ45 подключаются к общей шине блоки 10-18, 21-23, 26, имеющие уникальный адрес (МАС-адрес).
Функционирование заявляемого изобретения заключается в следующем.
Технические средства бортовых измерений, расположенные на борту ЛА (контур А), включают блоки P1, Р2, Р3, …PN, 1-4. Они осуществляют многоплановые измерения на борту ЛА и организуют идентификацию, обработку, хранение и передачу в наземный комплекс обработки информации текущих параметров систем, узлов и агрегатов ЛА. Путем подключения блоков P1, Р2, Р3, …PN к системам, узлам и агрегатам ЛА, измеряются физические значения параметров соответствующих СЧ. Сигналы от датчиков блоков P1,P2, Р3, …PN поступают в ботовой измеритель 2, где осуществляется их идентификация и обработка. В качестве ботового измерителя на этапе летных испытаний используется нештатная система ботовых измерений, например: [https://konved.ru/], а на этапах эксплуатации -система объективного контроля и штатные системы ЛА. После обработки сигналов в блоке 1, первичная полетная информация записывается и хранится в блоке 4, откуда может быть перенесена после выполнения полета в блок 5. Во время выполнения полета первичная полетная информация из блока 1 через блок 2 передается на землю в блок 7 и проходит обработку на борту ЛА в блоке 3. Передача полетной информации с борта ЛА осуществляется по каналам сотовой, спутниковой связи, либо с использованием каналов штатных ботовых систем передачи информации ЛА, при этом должно обеспечиваться устойчивая двусторонняя связь с коммутатором 7. После выполнения полета информация от 1 переносится в наземный комплекс обработки полетной информации 5 по проводному интерфейсу.
Технические средства наземной обработки и анализа полетной информации включают блоки 5-10 (контур С). Функция технических средств контура С состоит в сборе, обработке и анализе информации, полученной от реального физического объекта (ЛА) и его цифрового двойника. Первичная полетная информация, обработанная в блоке 5, через коммутатор 7 поступает в блок 8, где осуществляется автоматизированная обработка результатов моделирования, полученных от цифрового двойника и от реального физического объекта - летательного аппарата, а также для управления режимами ЛА и ЦД в соответствии с подходом, предложенным в [Корнев, А.В. Применение отечественных суперкомпьютерных технологий для создания перспективных образцов авиационной техники / А. В. Корнев, А. С.Козелков. // Современные информационные технологии и ИТ-образование, 2021. Т. 17, №2. С. 250-264].
Результаты обработки передаются для записи и хранения в блок 10, а в блок 9 для визуализации и протоколирования результатов.
Технические средства цифрового двойника (контур В) по предназначению и выполняемым функциям подразделяются на три группы: технические средства формирования и хранения ЦД (блоки 25-28, DT1, DT2, DT3, …DTN, контур В1), технические средства моделирования (блоки 14-24, контур В2) и технические средства управления, контроля и валидации ЦД (блоки 11-13, контур В3).
Построение ЦД СЧ ЛА начинается в модуле построения структурной модели (блок 25), для построения которой используется конструкторская документация ЛА и библиотеки моделей поверхности изделий из блока 26. На основании формированной структурной модели в блоке 21 создается геометрическая модель СЧ ЛА.
Для выполнения дальнейших расчетов необходимо сформировать компьютерную геометрическую модель интересующей области исследования, подготовленную для создания сеточной модели расчетной зоны на базе геометрической. В блоке 20 осуществляется разбиение геометрической модели, созданной в блоке 21, на отдельные малые ячейки (контрольные объемы). Эта процедура производится полуавтоматически в модуле 20 по алгоритмам, изложенным в [Сегерлинд Л. Применение метода конечных элементов. М.: Мир, 1979. 392 с.]. Созданная сеточная модель для многодисциплинарных расчетов поступает из блока 20 для получения численной модели в следующие блоки:
в блок 16 - для численного моделирования задач аэродинамики ЦД ЛА путем решения задач течения жидкости и газа, многофазных и реагирующих потоков, а также акустики при проектировании высокотехнологичных промышленных изделий по алгоритмам, изложенным в [Павловский В.А., Никущенко Д.В Вычислительная гидродинамика. Теоретические основы. СПб. Лань, 2018. 368 с. ];
в блок 17 - для численного моделирования задач прочности путем решения задач статического и динамического упругопластического деформирования и разрушения конструкций, а также вибрационного анализа и широкополосной случайной вибрации по алгоритмам, изложенным в [Когаев, В.П. Расчеты на прочность при напряжениях, переменных во времени / В.П. Когаев; под ред. А.П. Гусенкова. - 2-е изд., перераб. и доп.М.: Машиностроение, 1993. 354 с.];
в блок 18 - для численного моделирования задач теплопроводности, излучения и фазовых переходов в твердых телах и неподвижных средах по алгоритмам, изложенным в [Савельева И.Ю., Станкевич И.В. Математическое моделирование процессов теплопроводности методом конечных элементов. Изд. МГТУ им. Н.Э. Баумана, 2019, 176 с.];
в блок 19 - для численного моделирования электродинамического, электромагнитного, схемотехнического и теплового инженерного анализа для микроэлектронных, электро- и радиотехнических компонентов, устройств и систем. [Гринев А.Ю. Численные методы решения прикладных задач электродинамики. М. Радиотехника, 2012 - 336 с.].
Полученные в блоках 16-19 численные модели, являющиеся результатом расчета, представляет собой массив данных: дискретная модель (сетка), в которой для каждой ячейки найдены параметры потока (давление, температура, скорость, плотность и т.п.), соответствующие сошедшемуся решению. Для решения связанных задач, численные модели могут поступать в блок 14 для проведения сквозного мультифизичного моделирования на основе связанных, сопряженных и поэтапных расчетов, параметрических и оптимизационных исследований по встроенному в программное обеспечение алгоритмам, изложенным в [http://cit.bsau.ru/netcat_files/File/CIT/manuals/ANSYS.pdf] и в [Ермаков, А.И. Решение сопряженных задач и моделирование деформирования элементов двигателей в программном комплексе ANSYS [Электронный ресурс]: электрон, учеб. пособие / А.И. Ермаков, А.О. Шкловец; Минобрнауки России, Самар. гос. аэрокосм. ун-т им. акад. С.П. Королева (нац. исслед. ун-т). - Самара, 2011].
Обмен данными между блоками 16, 17, 18 и 19 при совместном моделировании и блоком 14 происходит по ЛВС. Результаты моделирования из блоков 14, 16, 17, 18, 19 через ЛВС поступают в блок 15, где формируются комплексные математические модели, предназначенные для исследования и анализа нестационарных процессов в ЦД ЛА и создаются комплексные модели функционирования ЦД ЛА путем проектирования логико-динамических систем, описываемых во входо-выходных отношениях, в виде систем обыкновенных дифференциальных уравнений и/или дифференциально-алгебраических уравнений в соответствии с подходом, предложенным в [https://digitaltwin.ru/wp-content/uploads/2022/09/SimInTech-rus.pdf] и в [Корнев А.В., Маковская Т.Д., Сатин А.А. Виртуальная модель функционирования летательного аппарата в программном комплексе SimInTech // В книге: Системный анализ, управление и навигация. XXV международная научная конференция: тезисы докладов. МАИ (национальный исследовательский университет), АНО ДПО «Космос -образование». Москва, 2021. С. 115-116.]
Блок 11 - осуществляющий функции формирования исходных данных эксперимента, задания граничных условий моделирования; блок 12 -осуществляющий функции, связанные с контролем соответствия состава ЦД ЛА реальному экземпляру ЛА; блок 13 - валидатор цифрового двойника, осуществляющий процедуру валидации полученных моделей путем проведения валидационного сравнения и оценки соответствия компьютерной модели объекту моделирования; связаны с блоками контура В через ЛВС, а необходимую для анализа и обработки информацию от ЛА получают и передают через коммутатор (блок 7).
Для реальных трехмерных задач с большим количеством расчетных ячеек процесс получения численного решения занимает значительное время, поэтому для ускорения выполнения вычислений предусмотрена высокопроизводительная вычислительная система (блок 24), доступ к которой осуществляется по ЛВС. Вычислительные ресурсы блока 24 используются блоками 14-19. Также для удобства и минимизации возможных ошибок в расчетах предусмотрены два блока хранения информации: блок 22 - блок хранения информации «Среда», предназначенный для хранения и организации доступа к параметрам твердых, жидких и газообразных сред, используемых при моделировании различных физических процессов (плотность, вязкость, текучесть, электропроводность и т.п.); и блок 23 - блок хранения информации «Материалы», предназначенный для хранения и организации доступа к характеристикам конструкционных материалов (предел прочности, предел текучести, температура плавления, рабочая температура и т.д.), используемых при моделировании.
Результаты моделирования поступают в блоки 5 и 8 через блок 7 и используются в дальнейшем для исследований и управления процессами жизненного цикла ЛА. Полученные компьютерные модели, а также результаты моделирования поступают в блоки хранения компьютерных моделей и результатов моделирования цифровых двойников DT1, DT2, DT3, … DTN и блок хранения информации «Цифровой двойник» (блок 28).
Заявленное изобретение относится к области вычислительной техники для испытаний и эксплуатации авиационной техники. Технический результат заключается в обеспечении возможности синтеза цифрового двойника летательного аппарата из цифровых двойников его составных частей. Технический результат достигается за счет того, что киберфизическая система синтеза цифрового двойника летательного аппарата включает конструктивно связанные и взаимодействующие между собой блоки измерений физических значений параметров систем, узлов и агрегатов летательного аппарата от 1 до N; бортовой измеритель; блок приема-передачи данных; наземный комплекс обработки полетной информации; блок идентификации, обработки и анализа; коммутатор беспроводной системы передачи данных; модуль численного моделирования «Гидрогазодинамика»; модуль численного моделирования «Прочность»; модуль численного моделирования «Теплопроводность»; модуль численного моделирования «Электромагнетизм»; модуль построения дискретной модели; модуль построения геометрической модели; модуль построения структурной модели; блок хранения информации «Конструкторская документация»; локальную вычислительную сеть; блок хранения информации «Материалы»; блок хранения информации «Среда»; блок управления хранилищами цифровых двойников; блок хранения информации «Цифровой двойник». 1 ил.
Киберфизическая система синтеза цифрового двойника летательного аппарата, характеризующаяся тем, что она включает:
блоки измерений физических значений параметров систем, узлов и агрегатов летательного аппарата от 1 до N, выходы которых соединены со входами бортового измерителя от 1 до N соответственно;
бортовой измеритель, первый вход-выход которого соединен с первым входом-выходом блока приема-передачи данных, второй вход-выход ботового измерителя соединен с первым входом-выходом наземного комплекса обработки полетной информации, третий вход-выход ботового измерителя соединен с входом выходом бортового съемного носителя информации;
блок приема-передачи данных, второй вход-выход которого соединен с первым входом-выходом коммутатора беспроводной системы передачи данных, третий вход-выход блока приема-передачи данных соединен с входом-выходом бортовой системы валидации;
наземный комплекс обработки полетной информации, второй вход-выход которого соединен с входом-выходом блока хранения первичной полетной информации, третий вход-выход наземного комплекса обработки полетной информации соединен со вторым входом-выходом коммутатора беспроводной системы передачи данных, четвертый вход-выход наземного комплекса обработки полетной информации соединен с первым входом-выходом блока идентификации, обработки и анализа;
блок идентификации, обработки и анализа, второй вход-выход которого соединен с шестым входом-выходом коммутатора беспроводной системы передачи данных, третий вход-выход блока идентификации, обработки и анализа соединен с входом-выходом блока хранения информации «Результаты», четвертый вход-выход блока идентификации, обработки и анализа соединен с входом-выходом блока протоколирования и визуализации результатов;
коммутатор беспроводной системы передачи данных, третий вход-выход которого соединен с первым входом-выходом блока управления, четвертый вход-выход коммутатора беспроводной системы передачи данных соединен с первым входом-выходом блока контроля изменений и модификации цифрового двойника, пятый вход-выход коммутатора беспроводной системы передачи данных соединен с первым входом-выходом валидатора цифрового двойника;
модуль численного моделирования «Гидрогазодинамика», второй вход-выход которого соединен с первым выходом модуля построения дискретной модели;
модуль численного моделирования «Прочность», второй вход-выход которого соединен со вторым выходом модуля построения дискретной модели;
модуль численного моделирования «Теплопроводность», второй вход-выход которого соединен с третьим выходом модуля построения дискретной модели;
модуль численного моделирования «Электромагнетизм», второй вход-выход которого соединен с четвертым выходом модуля построения дискретной модели;
модуль построения дискретной модели, пятый вход-выход которого соединен с первым входом-выходом модуля построения геометрической модели;
модуль построения геометрической модели, второй вход-выход которого соединен с первым входом-выходом модуля построения структурной модели;
модуль построения структурной модели, второй вход-выход которого соединен со вторым входом-выходом блока управления хранилищами цифровых двойников, третий вход-выход модуля построения структурной модели соединен с входом-выходом блока хранения информации «Конструкторская документация»;
локальную вычислительную сеть, первый порт подключения которой соединен с первым входом-выходом модуля численного моделирования «Гидрогазодинамика», второй порт подключения локальной вычислительной сети соединен с первым входом-выходом модуля численного моделирования «Прочность», третий порт подключения локальной вычислительной сети соединен с первым входом-выходом модуля численного моделирования «Теплопроводность», четвертый порт подключения локальной вычислительной сети соединен с первым входом-выходом модуля численного моделирования «Электромагнетизм», пятый порт подключения локальной вычислительной сети соединен с первым входом-выходом блока управления хранилищами цифровых двойников, шестой порт подключения локальной вычислительной сети соединен с входом-выходом высокопроизводительной вычислительной системы, седьмой порт подключения локальной вычислительной сети соединен с входом-выходом блока хранения информации «Материалы», восьмой порт подключения локальной вычислительной сети соединен с входом-выходом блока хранения информации «Среда», девятый порт подключения локальной вычислительной сети соединен со вторым входом-выходом валидатора цифрового двойника, десятый порт подключения локальной вычислительной сети соединен со вторым входом-выходом блока контроля изменений и модификации цифрового двойника, одиннадцатый порт подключения локальной вычислительной сети соединен со вторым входом-выходом блока управления, двенадцатый порт подключения локальной вычислительной сети соединен с входом-выходом модуля функционального моделирования, тринадцатый порт подключения локальной вычислительной сети соединен с входом-выходом модуля численного моделирования связанных задач;
блок управления хранилищами цифровых двойников, третий вход-выход которого соединен с входом-выходом блока хранения информации «Цифровой двойник», входы-выходы для связи с хранилищами цифровых двойников от 1 до N блока управления хранилищами цифровых двойников соединены с входами-выходами блоков хранения информации цифровых двойников от 1 до N соответственно.
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| СИСТЕМА СБОРА И ОБРАБОТКИ ПОЛЁТНОЙ ИНФОРМАЦИИ ДЛЯ ВАЛИДАЦИИ ЦИФРОВОГО ДВОЙНИКА ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПРОВЕДЕНИИ ЛЁТНЫХ ИСПЫТАНИЙ | 2022 |
|
RU2780244C1 |

