Изобретение относится к области восприятия внешней окружающей среды транспортного средства.
Обнаружение значимых объектов для транспортного средства, называемых целями, является сложным процессом. Одной технологии восприятия недостаточно для стабильного и надежного обнаружения целей. Как известно, используют один или более датчиков визуального наблюдения, связанных с датчиками, физические принципы которых являются комплементарными и которые являются менее чувствительными к условиям освещения. Для повышения достоверности обнаружения применяют методы слияния данных.
Известные методы слияния учитывают характеристики датчиков, но недостаточно репрезентативно учитывают факторы внешнего влияния на эти датчики.
Изобретение призвано устранить недостатки известных решений и предложить способ, позволяющий присвоить каждой цели, обнаруженной транспортным средством, оценку достоверности, учитывающую собственные характеристики датчиков и окружающую среду транспортного средства.
Объектом изобретения является способ оценки достоверности определения цели в окружающей среде транспортного средства, при этом транспортное средство содержит вычислительное устройство и множество датчиков, выполненных с возможностью обнаружения целей в указанной окружающей среде, при этом способ содержит следующие этапы:
- этап обнаружения, на котором один датчик из множества датчиков обнаруживает отслеживаемую цель и на котором вычислительное устройство инициализирует оценку достоверности указанной отслеживаемой цели на заранее определенном значении,
- этап считывания, на котором один датчик из множества датчиков, называемый активным датчиком, собирает данные для обнаружения целей в окружающей среде и передает в вычислительное устройство данные обнаружения, соответствующие обнаруженным целям, при этом отсутствие передачи данных по отслеживаемой цели соответствует информации о не обнаружении отслеживаемой цели,
- этап взвешивания, на котором вычислительное устройство присваивает отслеживаемой цели весовой коэффициент в зависимости от обнаружения или не обнаружения отслеживаемой цели активным датчиком, взвешенный в зависимости и собственных характеристик активного датчика и от окружающей среды транспортного средства,
- этап котировки, на котором вычислительное устройство актуализирует оценку достоверности отслеживаемой цели в зависимости от ранее присвоенного весового коэффициента.
Согласно одному из аспектов изобретения, собственные характеристики активного датчика включают в себя тип датчика, поле действия датчика.
Согласно одному из аспектов изобретения, окружающая среда транспортного средства содержит другие цели, называемые целями-препятствиями, объекты инфраструктуры дороги, по которой движется транспортное средство, зеленые насаждения.
Согласно одному из аспектов изобретения, весовой коэффициент взвешивают также на этапе взвешивания в зависимости от атмосферных условий, включающих в себя метеорологические условия и освещенность.
Согласно одному из аспектов изобретения, весовой коэффициент взвешивают также на этапе взвешивания в зависимости от свойств отслеживаемой цели, включающих в себя цвет, расстояние до активного датчика, место расположения относительно активного датчика, класс, размер.
Согласно одному из аспектов изобретения, оценку достоверности цели актуализируют на этапе котировки, добавляя к ней ранее присвоенный весовой коэффициент.
Согласно одному из аспектов изобретения, этапы считывания, взвешивания и котировки повторяют в течение времени для всех датчиков, которые могут обнаруживать цели в указанной окружающей среде, при этом оценку достоверности отслеживаемой цели актуализируют на каждом этапе котировки в зависимости от весового коэффициента цели, связанной с активным датчиком.
Согласно одному из аспектов изобретения, весовой коэффициент цели является функцией вероятности обнаружения отслеживаемой цели и вероятности ложного обнаружения отслеживаемой цели.
Согласно одному из аспектов изобретения, весовой коэффициент отслеживаемой цели является бонусным значением, превышающим или равным заранее определенному порогу в случае обнаружения отслеживаемой цели активным датчиком, и весовой коэффициент отслеживаемой цели является малусным значением, меньшим или равным заранее определенному порогу в случае не обнаружения отслеживаемой цели активным датчиком.
Согласно одному из аспектов изобретения, весовой коэффициент отслеживаемой цели равен заранее определенному порогу в случае не обнаружения отслеживаемой цели активным датчиком, при этом указанное не обнаружение может быть спрогнозировано вычислительным устройством в зависимости от собственных характеристик активного датчика и от окружающей среды транспортного средства.
Объектом изобретения является также компьютерный программный продукт, содержащий команды программы, осуществляющей по меньшей мере один этап способа, когда команды программы исполняет компьютер.
Другие преимущества и отличительные признаки изобретения будут более очевидны из описания и чертежей.
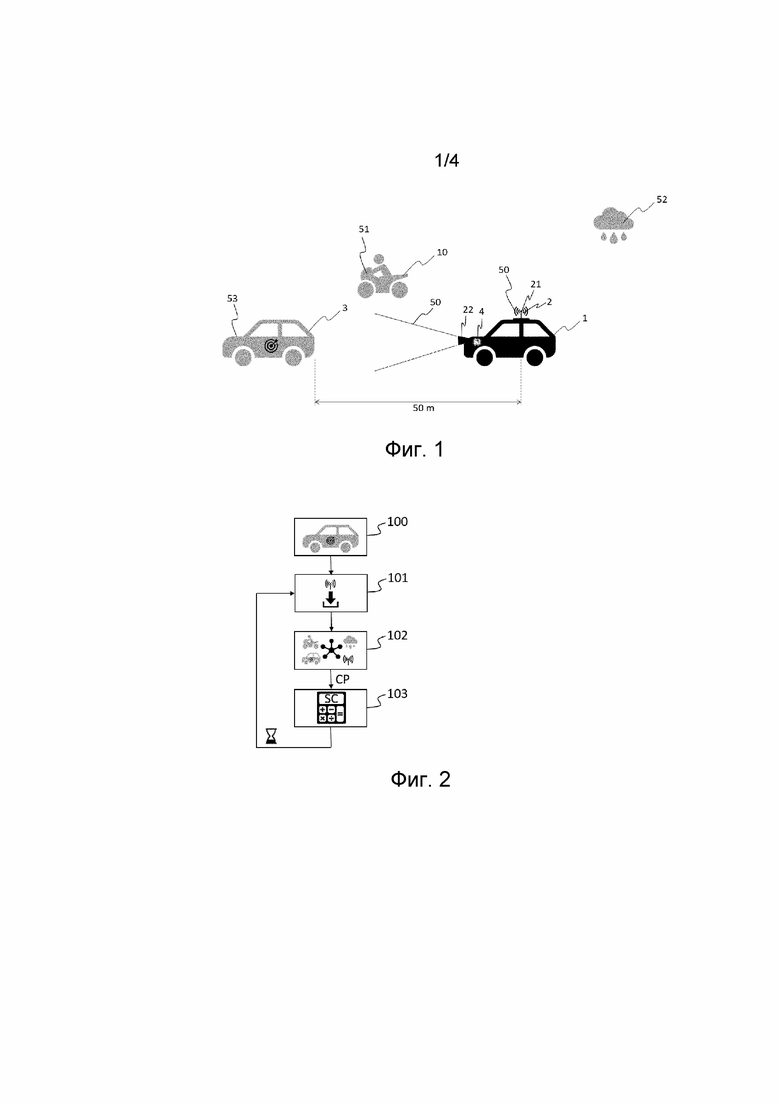
Фиг. 1 – схематичный вид транспортного средства в окружающей среде, содержащей цели.
Фиг. 2 – этапы заявленного способа.
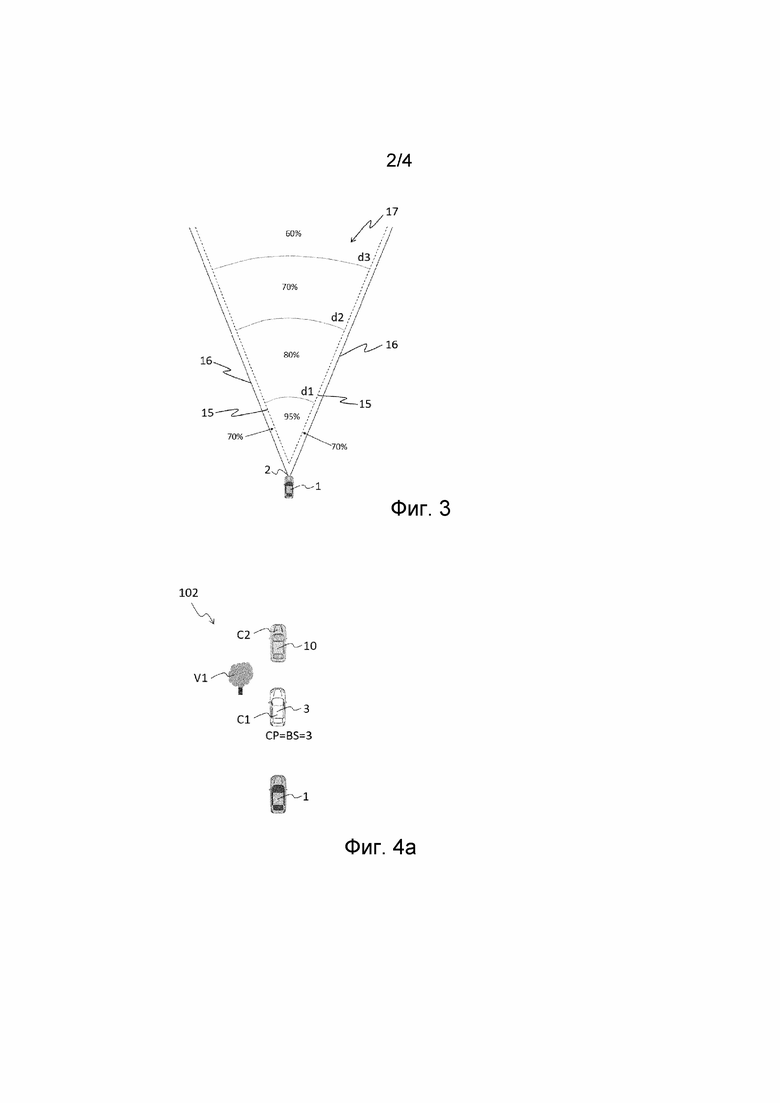
Фиг. 3 – взвешивание вероятности обнаружения цели в зависимости от места расположения цели в поле действия датчика.
Фиг. 4а – этап взвешивания способа для первой цели.
Фиг. 4b – этап взвешивания способа для второй цели.
Фиг. 4с – этап котировки способа.
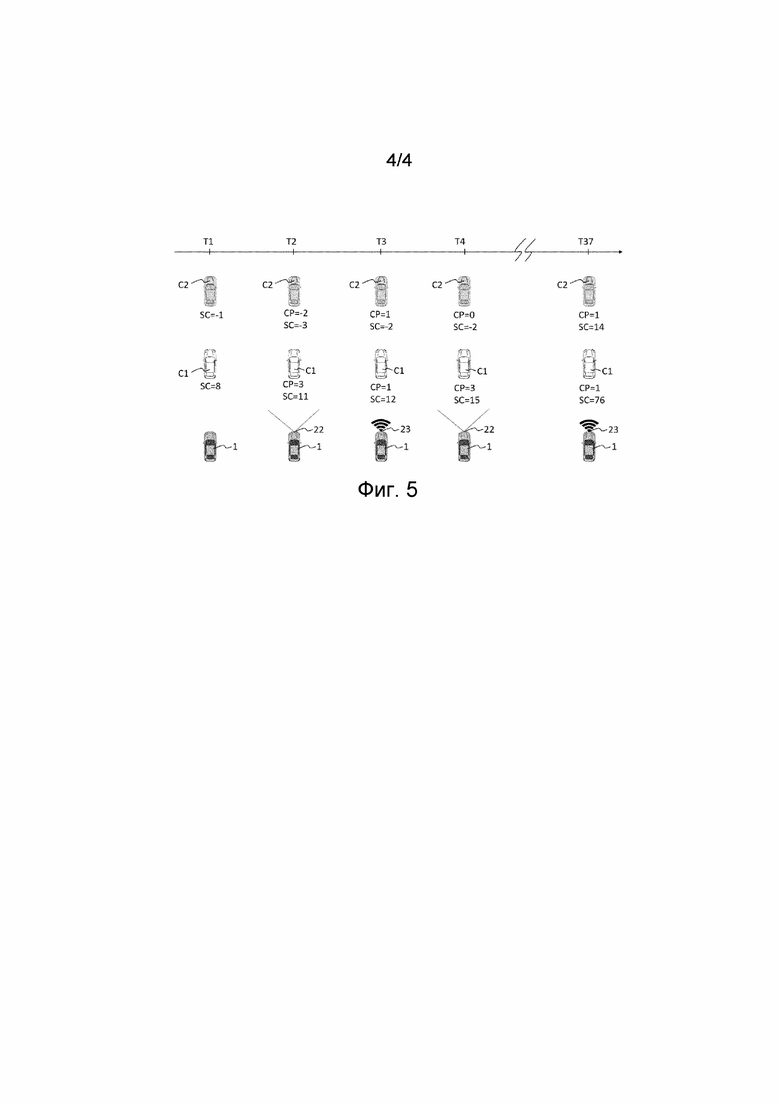
Фиг. 5 – изменение оценки достоверности двух целей в течение времени.
На фиг. 1 показано транспортное средство 1, содержащее множество датчиков 21, 22, выполненных с возможностью обнаруживать цели 3, 10 в окружающей среде 51 транспортного средства 1, и вычислительное устройство 4.
Датчик 21 является, например, лидаром.
Датчик 22 является, например, фронтальной камерой.
Датчик 21 называют «активным датчиком» 2, так как он в данный момент собирает данные для обнаружения целей 3, 10 в окружающей среде.
Датчики 21, 22 имеют собственные характеристики 50, включающие в себя, в частности, поле обзора, как показано на фиг. 1.
Как правило, собственные характеристики 50 датчика 21, 22 включают в себя тип датчика, поле обзора датчика.
Тип датчика включает в себя понятия лидара, синхронной камеры, несинхронной камеры, радара.
Поле действия датчика включает в себя понятия угла действия, боковой дальности действия, фронтальной дальности действия, радиуса действия, диаметра действия.
Собственными характеристиками 50 датчика 21, 22 могут быть:
- характеристики, выдаваемые поставщиком датчика 21, 22,
- характеристики, получаемые посредством моделирования,
- характеристики, определенные в ходе тестов, имитирующих реальную местность.
Тесты, имитирующие реальную местности, производят, например, с тестовым транспортным средством в окружающей среде, отображающей условия конечного использования в соответствии с соответствующими сценариями, реалистичными по отношению к конечному использованию.
Цель 3, 10 является предметом, человеком или животным, которые представляют интерес для транспортного средства 1. Цель 3, 10 может быть автомобилем, велосипедом, мотоциклом, пешеходом, животным, дорожным знаком или указателем, светофором, деревом.
Цель 3, 10 имеет свои свойства 53, которые включают в себя:
- цвет, например, черный, серый или белый, и/или степень интенсивности цвета, например, темный, средний или светлый,
- расстояние до транспортного средства 1,
- место расположения относительно активного датчика 2 и, в частности, место расположения в поле действия активного датчика 2,
- место расположения относительно окружающей среды транспортного средства 1, например, относительно ограждения или цели- препятствия 10,
- класс, такой как пешеход, транспортное средство, двухколесное транспортное средство, автомобиль, грузовик, дорожный знак или указатель, светофор,
- размер, относительный или абсолютный, выражаемый, например, в метрах, или указываемый по категории, например, небольшой, средний, большой,
- относительная скорость относительно транспортного средства 1 или относительно цели-препятствия 10.
Свойства 53 цели могут быть определены датчиками 21, 22, выполненными с возможностью обнаруживать цели в окружающей среде, связанными или нет с другими датчиками или с банком данных известных целей, доступным через вычислительное устройство 4.
Показанное на фиг. 1 транспортное средство 1 обнаруживает отслеживаемую цель 3 в окружающей среде 51, содержащей цель-препятствие 10.
Отслеживаемая цель 3 является автомобилем, цель-препятствие 10 является мотоциклом.
Отслеживаемая цель 3 имеет свойства 53, которыми являются серый цвет, класс автомобиля, размер «седан», расстояние до активного датчика 2, равное пятидесяти метрам.
Показанная на фиг. 1 окружающая среда 51 транспортного средства 1 содержит цель-препятствие 10.
Как правило, окружающая среда 51 транспортного средства 1 включает в себя:
- цели-препятствия 10,
- объекты инфраструктуры дороги, по которой движется транспортное средство, такие как ограждения, стены или стенки ограничения дороги,
- зеленые насаждения, такие как живые изгороди, деревья,
- мосты.
Окружающую среду 51 транспортного средства 1 могут обнаруживать датчики 21, 22, выполненные с возможностью обнаруживать цели 3, 10 в окружающей среде. Окружающая среда 51 может быть также представлена в вычислительное устройство 4 картографическим модулем, встроенным или не встроенным в транспортное средство 1.
Атмосферные условия 52 сцены, показанной на фиг. 1, включают в себя облачность с дождем.
Как правило, атмосферные условия 52 включают в себя:
- метеорологические условия, такие как дождь, туман, снег, температура,
- освещенность или освещение, которые может обнаруживать датчик освещения, или в зависимости от времени дня, от даты или от координат места расположения.
Атмосферные условия 52 могут быть обнаружены датчиками 21, 22, выполненными с возможностью обнаруживать цели 3, 10 в окружающей среде, например, синхронной камерой, или специальными датчиками, такими как датчик дождя или освещенности.
Вычислительное устройство 4 выполнено с возможностью определять оценку SC достоверности отслеживаемой цели 3.
На фиг. 2 показаны следующие этапы способа определения оценки SC достоверности:
- этап 100 обнаружения, на котором один датчик из множества датчиков 21, 22 обнаруживает отслеживаемую цель 3 и на котором вычислительное устройство 4 инициализирует оценку SC достоверности указанной отслеживаемой цели 3 на заранее определенном значении,
- этап 101 считывания, на котором один датчик из множества датчиков 21, 22 собирает данные для обнаружения целей 3, 10 в окружающей среде и передает в вычислительное устройство 4 данные обнаружения, соответствующие обнаруженным целям, при этом отсутствие передачи данных по отслеживаемой цели 3 соответствует информации о не обнаружении отслеживаемой цели 3,
- этап 102 взвешивания, на котором вычислительное устройство 4 присваивает отслеживаемой цели 3 весовой коэффициент СР в зависимости от обнаружения или не обнаружения отслеживаемой цели 3 активным датчиком 2, взвешенный в зависимости от собственных характеристик 50 активного датчика 2 и от окружающей среды 51 транспортного средства 1, от атмосферных условий 52, от свойств 53 отслеживаемой цели 3,
- этап 103 котировки, на котором вычислительное устройство 4 актуализирует оценку SC достоверности отслеживаемой цели 3 в зависимости от ранее присвоенного весового коэффициента СР.
Изобретение включает в себя два варианта осуществления и для каждого варианта осуществления этап 100 обнаружения может быть осуществлен в соответствии с двумя альтернативами.
На этапе 100 обнаружения датчик из множества датчиков 21, 22 обнаруживает отслеживаемую цель 3. Предпочтительно указанный датчик передает первоначальные данные, связанные с указанной отслеживаемой целью 3, в вычислительное устройство 4, которое сохраняет их в памяти.
Например, при активации систем обеспечения вождения датчики 21, 22 собирают данные периодически или при обнаружении движения или изменения освещенности. Первый датчик, собирающий данные после активации систем обеспечения вождения, например, датчик 22, который является камерой, обнаруживает первую отслеживаемую цель 3.
Согласно другому примеру, во время движения датчик, например, датчик 22, который является камерой, собирает данные и обнаруживает новую отслеживаемую цель 3, которую до этого момента еще не обнаружил ни один датчик 21, 22.
Вычислительное устройство 4 инициализирует оценку SC достоверности указанной отслеживаемой цели 3 в заранее определенном значении. Заранее определенное значение оценки SC достоверности при инициализации может быть фиксированным и абсолютным, например, равным нулю или единице, или может зависеть от вероятности обнаружения PD отслеживаемой цели 3 и от вероятности ложного обнаружения PFA отслеживаемой цели 3.
Согласно первой альтернативе этапа 100 обнаружения, вычислительное устройство 4 инициализирует оценку SC достоверности в заранее определенном значении, равном фиксированному пороговому значению ТН, например, равному нулю или единице в зависимости от варианта осуществления.
Согласно второй альтернативе этапа 100 обнаружения и при любом варианте осуществления, вычислительное устройство 4 инициализирует оценку SC достоверности в заранее определенном значении, равном бонусному значению BS, превышающему или равному пороговому значению ТН, предпочтительно являющемуся функцией вероятности обнаружения PD отслеживаемой цели 3 и вероятности ложного обнаружения PFA отслеживаемой цели 3, при этом бонусное значение BS определяют в зависимости от собственных характеристик 50 датчика, обнаружившего первую отслеживаемую цель 3 или новую отслеживаемую цель 3, и по меньшей мере от одного среди следующих факторов:
- окружающей среды 51 транспортного средства 1,
- атмосферных условий 52,
- свойств 53 отслеживаемой цели 3.
Согласно первому варианту осуществления изобретения, заранее определенный порог ТН равен нулю.
Предпочтительно бонусное значение BS равно неперовому логарифму частного от деления вероятности обнаружения PD отслеживаемой цели 3 на вероятность ложного обнаружения PFA отслеживаемой цели 3.
BS=ln (PD/PFA)
Предпочтительно бонусное значение BS округляют до ближайшего целого числа.
Согласно второму варианту осуществления изобретения, заранее определенный порог ТН равен одному.
Ниже в описании в части, касающейся этапа 102 взвешивания, будет показан способ вычисления бонусного значения BS согласно этому второму варианту осуществления.
На этапе 101 считывания, независимо от варианта осуществления изобретения, любой датчик из множества датчиков 21, 22, называемый активным датчиком 2, собирает данные для обнаружения целей 3, 10 в окружающей среде. Предпочтительно указанный активный датчик 2 передает данные, связанные с обнаруживаемыми целями, и, в частности, данные обнаружения или не обнаружения отслеживаемой цели 3, в вычислительное устройство 4, которое их сохраняет в памяти. При отсутствии передачи данных по отслеживаемой цели 3 активный датчик 2 передает информацию не обнаружения отслеживаемой цели 3.
На этапе 101 считывания указанный активный датчик 2 предпочтительно передает также данные, связанные с обнаруживаемыми целями-препятствиями 10. Предпочтительно указанный активный датчик 2 передает данные, связанные со всеми обнаруживаемыми целями. В зависимости от сохраненных в памяти первоначальных данных отслеживаемой цели 3 вычислительное устройство 4 выводит на их основании данные обнаружения или не обнаружения указанной отслеживаемой цели 3 и данные целей-препятствий 10. Действительно, если активный датчик 2 не передает информацию, связанную с целью, значит он ее не обнаружил, и это является случаем не обнаружения. Датчик не обнаруживает цель, например, так как метеорологические условия, такие как туман, не позволяют ему ее обнаружить или так как цель скрыта препятствием, или освещенность является слишком слабой, или цель имеет темный цвет.
Предпочтительно данные обнаружения или не обнаружения отслеживаемой цели 3, передаваемее активным датчиком 2 в вычислительное устройство 4, являются данными, не учитывающими предыдущие считывания данных указанным активным датчиком 2. В частности, активный датчик 2 не производит мониторинга отслеживаемой цели 3 и не делает предсказания места расположения отслеживаемой цели 3. Данные обнаружения или не обнаружения отслеживаемой цели 3, передаваемее активным датчиком 2 в вычислительное устройство 4, отражают данные, собранные только во время текущего этапа 101 считывания активным датчиком 2.
Если осуществляется стратегия мониторинга отслеживаемой цели 3 или предсказания траектории, такую стратегию применяет вычислительное устройство 4. Действительно, вычислительное устройство 4, которое осуществляет такую стратегию отслеживания или предсказания, является более эффективным, так как оно располагает информацией от всех датчиков 21, 22, которые могут обнаруживать цели 3, 10. Если активный датчик 2 тоже учитывает такую стратегию, существует риск распространения ошибки ложного обнаружения или не обнаружения, и от этого пострадает оценка SC достоверности.
Согласно примеру, показанному на фиг. 1, активный датчик 2 является датчиком 21, представляющим собой лидар.
В этой ситуации возможны два случая. В первом случае активный датчик 2 обнаруживает отслеживаемую цель 3. Во втором случае активный датчик не обнаруживает отслеживаемую цель 3.
Вычислительное устройство 4 выполнено с возможностью дифференцировать эти два случая, так как оно ранее сохранило первоначальные данные, связанные с отслеживаемой целью 3.
На этапе 102 взвешивания, независимо от варианта осуществления изобретения, вычислительное устройство 4 присваивает отслеживаемой цели 3 весовой коэффициент СР в зависимости от обнаружения или не обнаружения отслеживаемой цели 3 активным датчиком 2, взвешенный в зависимости от собственных характеристик 50 активного датчика 2 и по меньшей мере от одного среди следующих факторов:
- окружающей среды 51 транспортного средства 1,
- атмосферных условий 52,
- свойств 53 отслеживаемой цели.
Предпочтительно весовой коэффициент СР отслеживаемой цели 3 является функцией вероятности обнаружения PD отслеживаемой цели 3 и вероятности ложного обнаружения PFA отслеживаемой цели 3.
Весовой коэффициент СР отслеживаемой цели 3 является результатом логистической математической функции, в частности, обратной сигмоиды.
В случае обнаружения отслеживаемой цели 3 активным датчиком 2 весовой коэффициент СР отслеживаемой цели 3 является бонусным значением BS, превышающим или равным заранее определенному порогу ТН.
Согласно первому варианту осуществления изобретения, заранее определенный порог ТН равен нулю.
Предпочтительно бонусное значение BS равно неперовому логарифму частного от деления вероятности обнаружения PD отслеживаемой цели 3 на вероятность ложного обнаружения PFA отслеживаемой цели 3.
BS=ln (PD/PFA)
Предпочтительно бонусное значение BS округляют до ближайшего целого числа.
В случае не обнаружения отслеживаемой цели 3 активным датчиком 2 весовой коэффициент СР отслеживаемой цели 3 является малусным значением MS, меньшим или равным заранее определенному порогу ТН.
Малусное значение MS равно неперовому логарифму частного от деления вероятности обнаружения PD цели 3, вычтенной из единицы, на вероятность ложного обнаружения PFA цели 3, вычтенную из единицы.
MS=ln ((1-PD)/(1-PFA))
Предпочтительно малусное значение МS округляют до ближайшего целого числа.
Предпочтительно по меньшей мере вероятность обнаружения PD отслеживаемой цели 3 или вероятность ложного обнаружения PFA отслеживаемой цели 3 взвешивают в зависимости от собственных характеристик 50 активного датчика 2 и по меньшей мере от одного среди следующих факторов:
- окружающей среды 51 транспортного средства 1,
- атмосферных условий 52,
- свойств 53 отслеживаемой цели 3.
Представленные в нижеследующих таблицах примеры относятся к первому варианту осуществления. В связи с этим следует указать, что TH=0, BS=ln (PD/PFA) и MS=ln ((1-PD)/(1-PFA).
Несколько примеров взвешивания вероятности обнаружения PD отслеживаемой цели 3 и вероятности ложного обнаружения PFA отслеживаемой цели 3 представлены ниже в качестве иллюстрации для активного датчика 2, который является датчиком типа камеры.
Таблица 1
- Расстояние от отслеживаемой цели 3 до активного датчика 2 > 80 м
- Расстояние от отслеживаемой цели 3 до активного датчика 2 > 80 м
- Сильный дождь
- Расстояние от отслеживаемой цели 3 до активного датчика 2 > 80 м
- Слабая освещенность (ночь) или слишком сильная освещенность (выезд из туннеля)
Как показано в таблице 1, по умолчанию для камеры вероятность обнаружения PD отслеживаемой цели 3 равна 90%, вероятность ложного обнаружения PFA отслеживаемой цели 3 равна 5%. Таким образом, когда после сбора данных активным датчиком 2 указанный активный датчик 2 обнаруживает отслеживаемую цель 3, вычислительное устройство 4 присваивает отслеживаемой цели 3 весовой коэффициент СР, равный бонусному значению BS 3. Если после сбора данных активным датчиком 2 указанный активный датчик 2 не обнаруживает отслеживаемую цель 3, вычислительное устройство 4 присваивает отслеживаемой цели 3 весовой коэффициент СР, равный малусному значению МS -2.
Если в соответствии со свойствами 53 отслеживаемой цели 3, отслеживаемая цель 3 относится к классу пешехода или двухколесного транспортного средства и расстояние между отслеживаемой целью 3 и активным датчиком 2 превышает 80 м, вероятность обнаружения PD отслеживаемой цели 3 делят на два, то есть она равна 45%. Следовательно, соответствующее бонусное значение BS понижается до 2, и соответствующее малусное значение MS равно -1. Цель небольшого размера, находящуюся дальше половины расстояния действия камеры, труднее обнаружить, чем цель, находящуюся ближе к камере, или чем цель большего размера.
Точно так же, если в соответствии с атмосферными условиями 52 обнаружен сильный дождь, например, при помощи датчика дождя или при помощи камеры, вероятность обнаружения PD отслеживаемой цели 3 делят на два, то есть она равна 45%. Сильный дождь затрудняет обнаружение целей для камеры.
Если в соответствии со свойствами 53 отслеживаемой цели 3 отслеживаемая цель 3 относится к классу пешехода или двухколесного транспортного средства, если расстояние между отслеживаемой целью 3 и активным датчиком 2 превышает 80 м и если к тому же в соответствии с атмосферными условиями 52 обнаружен сильный дождь, то вероятность обнаружения PD отслеживаемой цели 3 снижается до 30%. Следовательно, соответствующее малусное значение MS становится нулевым.
Если в соответствии со свойствами 53 отслеживаемой цели 3 отслеживаемая цель относится к классу пешехода или двухколесного транспортного средства и если в соответствии с атмосферными условиями 52 обнаружена очень слабая или очень сильная освещенность, то вероятность обнаружения PD отслеживаемой цели 3 снижается до 25%. Следовательно, соответствующее малусное значение MS становится нулевым. Действие на камеру условий слишком сильной освещенности ухудшает обнаружение целей.
Если в соответствии со свойствами отслеживаемой цели 3 в сочетании с собственными характеристиками активного датчика 2 отслеживаемая цель 3 находится менее чем в двух метрах от границы поля действия активного датчика 2, то вероятность обнаружения PD отслеживаемой цели 3 устанавливается в 70%. Следовательно, соответствующее бонусное значение BS становится равным 3, а соответствующее малусное значение становится равным -1. Цель, близкая к полю действия камеры, может быть не полностью обнаружена указанной камерой.
В соответствии с неблагоприятными атмосферными условиями и/или в зависимости от свойств 53 отслеживаемой цели 3 бонусное значение BS и малусное значение MS понижаются по абсолютной величине. Это позволяет снизить влияние на вычисление оценки SC достоверности отслеживаемой цели 3, которую актуализируют на следующем этапе 103 котировки.
Несколько примеров взвешивания вероятности обнаружения PD отслеживаемой цели 3 и вероятности ложного обнаружения PFA отслеживаемой цели 3 представлены ниже в таблице 2 в качестве иллюстрации для активного датчика 2, который является датчиком типа радара.
Таблица 2
- Симметрично с другой стороны ограждения присутствует цель-препятствие 10
Как показано в таблице 2, по умолчанию для радара вероятность обнаружения PD отслеживаемой цели 3 равна 99%, вероятность ложного обнаружения PFA отслеживаемой цели 3 равна 35%. Таким образом, когда после сбора данных активным датчиком 2 указанный активный датчик 2 обнаруживает отслеживаемую цель 3, вычислительное устройство 4 присваивает отслеживаемой цели 3 весовой коэффициент СР, равный бонусному значению BS 1. Если после сбора данных активным датчиком 2 указанный активный датчик 2 не обнаруживает отслеживаемую цель 3, вычислительное устройство 4 присваивает отслеживаемой цели 3 весовой коэффициент СР, равный малусному значению МS -4.
Если в соответствии со свойствами 53 отслеживаемой цели 3, отслеживаемая цель 3 относится к классу пешехода, вероятность обнаружения PD отслеживаемой цели 3 понижается до 70%. Следовательно, соответствующее малусное значение МS становится равным -1. Для радара трудно обнаруживать пешехода, так как речь идет о цели небольшого размера, которая не состоит из материала, отражающего волны, излучаемые радаром, в отличие от транспортного средства, которое имеет большой размер и металлическая поверхность которого облегчает обнаружение.
Точно так же, если в соответствии со свойствами отслеживаемой цели 3 в сочетании с собственными характеристиками активного датчика 2 отслеживаемая цель 3 находится менее чем в двух метрах от границы поля действия активного датчика 2, то вероятность обнаружения PD отслеживаемой цели 3 понижается до 70%, что соответствует малусному значению MS, равному -1. Цель, близкую к полю действия радара, трудно обнаружить при помощи радара, поскольку на границе поля действия радара отношение сигнала к шуму является плохим.
Если в соответствии со свойствами отслеживаемой цели 3 расстояние между отслеживаемой целью 3 и активным датчиком 2 меньше 10 м, то вероятность ложного обнаружения PFA отслеживаемой цели 3 увеличивается до 70%. Следовательно, соответствующее бонусное значение BS становится равным нулю, и соответствующее малусное значение MS становится равным -3. Как правило, обнаружение слишком близкой к радару цели сопровождается многочисленными ложными обнаружениями вокруг нее, которые связаны с волнами радара, многократно отражающимися между целью и транспортным средством, оснащенным указанным радаром.
Точно так же, когда в соответствии с окружающей средой 51 транспортного средства 1 обнаруживаются ограждение и цель-препятствие 10 и если в соответствии с свойствами отслеживаемой цели 3 отслеживаемая цель 3 находится вблизи ограждения и не находится со стороны полосы движения транспортного средства 1, а с другой стороны ограждения симметрично находится цель-препятствие 10, то вероятность ложного обнаружения PFA отслеживаемой цели 3 увеличивается до 75%. Действительно, очень вероятно, что отслеживаемая цель 3, обнаруженная активным датчиком 2, который является радаром, соответствует артефакту, при этом отслеживаемая цель 3 является отражением цели-препятствия 10 на ограждении.
Эти примеры иллюстрируют коррекцию бонусного значения BS и манусного значения MS для снижения влияния на вычисление оценки SC достоверности отслеживаемой цели 3, которую актуализируют на следующем этапе 103 котировки.
Несколько примеров взвешивания вероятности обнаружения PD отслеживаемой цели 3 и вероятности ложного обнаружения PFA отслеживаемой цели 3 представлены ниже в таблице 3 в качестве иллюстрации для активного датчика 2, который является датчиком типа лидара.
Таблица 3
- Расстояние от отслеживаемой цели 3 до активного датчика 2 > 80 м
Как показано в таблице 3, по умолчанию для лидара вероятность обнаружения PD отслеживаемой цели 3 равна 99%, вероятность ложного обнаружения PFA отслеживаемой цели 3 равна 5%. Таким образом, когда после сбора данных активным датчиком 2 указанный активный датчик 2 обнаруживает отслеживаемую цель 3, вычислительное устройство 4 присваивает отслеживаемой цели 3 весовой коэффициент СР, равный бонусному значению BS 3. Если после сбора данных активным датчиком 2 указанный активный датчик 2 не обнаруживает отслеживаемую цель 3, вычислительное устройство 4 присваивает отслеживаемой цели 3 весовой коэффициент СР, равный малусному значению МS -2.
Если в соответствии со свойствами 53 отслеживаемой цели 3, отслеживаемая цель 3 относится к классу пешехода или двухколесного транспортного средства и расстояние между отслеживаемой целью 3 и активным датчиком 2 превышает 80 м, вероятность обнаружения PD отслеживаемой цели 3 делят на два, то есть она равна 45%. Следовательно, соответствующее бонусное значение BS понижается до 2, и соответствующее малусное значение MS становится равным -1. Лидар является более эффективным на коротком расстоянии действия, так как на цель воздействует больший пучок лучей, чем на большом расстоянии.
Точно так же, если в соответствии с атмосферными условиями 52 обнаружен сильный снегопад или густой туман, например, при помощи камеры, вероятность обнаружения PD отслеживаемой цели 3 понижается до 30%. Следовательно, соответствующее малусное значение MS становится нулевым, и соответствующее бонусное значение BS понижается до 2. Лидары являются чувствительными к атмосферным условиям. Так, во время дождя или тумана пучок лучей, излучаемый лидаром, может искажаться от помех по причине преломления: когда луч лидара проходит через другую среду (такую как капля воды), скорость волны меняется, и наложение друг на друга различных слоев разных сред делает оценку расстояния приблизительной.
Если в соответствии со свойствами отслеживаемой цели 3 в сочетании с собственными характеристиками активного датчика 2 отслеживаемая цель 3 находится менее чем в двух метрах от границы поля действия активного датчика 2, то вероятность обнаружения PD отслеживаемой цели 3 устанавливается в 70%. Следовательно, соответствующее бонусное значение BS остается равным 3, а соответствующее малусное значение MS становится равным -1. Цель, близкая к полю действия лидара, может быть не полностью обнаружена указанным лидаром.
Если в соответствии со свойствами отслеживаемой цели 3 отслеживаемая цель 3 имеет черный цвет, вероятность обнаружения PD отслеживаемой цели 3 понижается до 30%. Следовательно, соответствующее бонусное значение BS понижается до 2, а соответствующее малусное значение MS становится нулевым. Цель черного цвета трудно обнаружить при помощи лидара, так как волна, излучаемая лидаром, является волной, близкой к инфракрасной области, которая поглощается черным цветом. Цвет отслеживаемой цели 3 предварительно определяют, например, при помощи камеры. Вычислительное устройство 4 сохраняет в памяти цвет отслеживаемой цели 3, когда оно присваивает отслеживаемой цели 3 весовой коэффициент СР на этапе 102 взвешивания.
В соответствии с неблагоприятными атмосферными условиями и/или в зависимости от свойств 53 отслеживаемой цели 3 бонусное значение BS и малусное значение MS понижаются по абсолютной величине. Это позволяет снизить влияние на вычисление оценки SC достоверности отслеживаемой цели 3, которую актуализируют на следующем этапе 103 котировки.
Представленные выше таблицы взвешивания являются примерами взвешивания вероятности обнаружения PD отслеживаемой цели 3 и вероятности ложного обнаружения PFA отслеживаемой цели 3 в соответствии с несколькими сценариями. Сценарии не являются ограничительными, и значения, присваиваемые вероятности обнаружения PD и вероятности ложного обнаружения PFA, не являются ограничительными. Эти таблицы представляют собой примеры типовых значений, которые можно присвоить вероятности обнаружения PD и вероятности ложного обнаружения PFA при осуществлении способа определения оценки SC достоверности цели в окружающей среде и которые дают лучшие результаты, чем известные технические решения. Вместе с тем, эти значения необходимо корректировать в зависимости от результатов моделирования и/или от подтверждения в реальной и репрезентативной окружающей среде с реальным транспортным средством.
На фиг. 3 представлен другой пример взвешивания вероятности обнаружения PD цели в зависимости от места нахождения цели в поле 17 действия активного датчика 2. В коридоре 15, например, в 2 метра, на границе 16 поля 17 действия активного датчика 2 вероятность обнаружения PD цели составляет 70%. До расстояния d1 от активного датчика 2, например, в 40 метров, вероятность обнаружения PD цели составляет 65%. Сверх расстояния d1 и до расстояния d2 от активного датчика 2, например, в 70 метров, вероятность обнаружения PD цели составляет 80%. Сверх расстояния d2 и до расстояния d3 от активного датчика 2, например, в 100 метров, вероятность обнаружения PD цели составляет 70%. Сверх расстояния d1 от активного датчика 2 вероятность обнаружения PD цели составляет 60%.
Согласно не показанному другому примеру, изменение вероятности обнаружения PD цели является линейным в зависимости от расстояния от цели до активного датчика 2 в поле 17 действия активного датчика 2.
Во втором варианте осуществления заранее определенный порог ТН равен единице.
В случае обнаружения отслеживаемой цели 3 активным датчиком 2 весовой коэффициент СР отслеживаемой цели 3 является бонусным значением BS, превышающим или равным единице. В случае не обнаружения цели 3 активным датчиком 2 весовой коэффициент СР отслеживаемой цели 3 является малусным значением MS, меньшим или равным единице.
Вычислительное устройство 4 в большей или меньшей степени отдаляет весовой коэффициент СР от цифры один, чтобы уменьшить или увеличить влияние на оценку SC достоверности, которую актуализируют на этапе 103 котировки, следующем за этапом 102 взвешивания.
Примеры взвешивания малусных значений MS и бонусных значений BS были представлены для первого варианта осуществления, но специалист в данной области может адаптировать взвешивание малусных значений MS и бонусных значений BS для второго варианта осуществления, например, сохраняя влияние на оценку SC достоверности пропорционально примерам, приведенным для первого варианта осуществления.
Бонусное значение BS на этапе 100 обнаружения и согласно второй альтернативе, когда вычислительное устройство 4 инициализирует оценку SC достоверности по бонусному значению BS, предпочтительно вычисляют так же, как и на описанном выше этапе 102 взвешивания, в зависимости от собственных характеристик 50 датчика, обнаружившего первую отслеживаемую цель 3 или новую отслеживаемую цель 3, и в зависимости от по меньшей мере одного из следующих факторов:
- от окружающей среды 51 транспортного средства 1,
- от атмосферных условий 52,
- от характеристик 53 отслеживаемой цели 3.
На этапе 102 взвешивания и независимо от варианта осуществления, в случае не обнаружения отслеживаемой цели 3 активным датчиком 2 и если не обнаружение может быть спрогнозировано вычислительным устройством 4 в зависимости от собственных характеристик 2 активного датчика 2 и в зависимости от по меньшей мере одного из следующих факторов:
- от окружающей среды 51 транспортного средства 1,
- от атмосферных условий 52,
- от свойств 53 отслеживаемой цели 3,
весовой коэффициент СР равен заранее определенному порогу ТН.
Для иллюстрации в нижеследующей таблице 4 представлены несколько примеров.
Таблица 4
и/или атмосферные условия 2,
и/или свойства отслеживаемой цели 3
Классическим сценарием не обнаружения, прогнозируемого вычислительным устройством 4, является случай, в котором отслеживаемая цель 3 скрыта целью-препятствием 10 и чаще всего автомобилем или грузовиком, когда активным датчиком 2 является камера или лидар.
Согласно первому варианту осуществления изобретения, заранее определенный порог ТН равен нулю. Следовательно, весовой коэффициент СР равен нулю.
Нулевой весовой коэффициент СР соответствует вероятности обнаружения PD отслеживаемой цели 3, равной вероятности ложного обнаружения PFA отслеживаемой цели 3 и равной 50%.
Предпочтительно вычислительное устройство 4 сразу присваивает значение нуля коэффициенту СР взвешивания отслеживаемой цели 3 в случае не обнаружения, прогнозируемого вычислительным устройством 4.
Весовой коэффициент СР, равный нулю, позволяет не влиять на оценку SC достоверности отслеживаемой цели 3, которую актуализируют на следующем этапе 103 котировки.
Согласно второму варианту осуществления изобретения, заранее определенный порог ТН равен единице. Следовательно, весовой коэффициент СР равен одному.
Весовой коэффициент СР, равный одному, позволяет не влиять на оценку SC достоверности отслеживаемой цели 3, которую актуализируют на следующем этапе 103 котировки.
На этапе 103 котировки и согласно любому из вариантов осуществления изобретения вычислительное устройство 4 актуализирует оценку SC достоверности отслеживаемой цели 3 в зависимости от ранее присвоенного весового коэффициента СР.
Согласно первому варианту осуществления, оценку SC достоверности отслеживаемой цели 3 предпочтительно актуализируют, добавляя к ней ранее присвоенный весовой коэффициент СР.
Таким образом, понятно, что при выборе заранее определенного порога ТН, равного нулю, и при выборе весового коэффициента СР, равного заранее определенному порогу ТН в случае скрытой цели, актуализация оценки SC достоверности с добавлением нулевого весового коэффициента СР не оказывает никакого влияния.
Поэтому, чтобы уменьшить влияние на оценку SC достоверности, бонусное BS и малусное MS значения понижаются по абсолютной величине, приближаясь, таким образом, к нулю, по отношению к значениям по умолчанию.
Согласно второму варианту осуществления, заранее определенный порог ТН равен единице.
Предпочтительно, оценку SC достоверности актуализируют, умножая ее на ранее присвоенный весовой коэффициент СР.
Таким образом, понятно, что при выборе заранее определенного порога ТН, равного единице, и при выборе весового коэффициента СР, равного заранее определенному порогу ТН в случае скрытой цели, актуализация оценки SC достоверности с умножением на равный единице весовой коэффициент СР не оказывает никакого влияния.
Поэтому, чтобы уменьшить влияние на оценку SC достоверности, бонусное BS и малусное MS значения приближают к значению 1 по отношению к значениям по умолчанию.
Независимо от варианта осуществления изобретения, этапы считывания 101, взвешивания 102 и котировки 103 повторяют в течение времени для всех датчиков 21, 22, которые могут обнаруживать цели 3, 10 в окружающей среде транспортного средства 1, при этом оценку SC достоверности отслеживаемой цели 3 актуализируют на каждом этапе 103 котировки в зависимости от весового коэффициента СР цели, соответствующего активному датчику 2.
Предпочтительно этапы 103 котировки осуществляют в хронологическом порядке соответствующих им этапов 101 считывания.
Например, камера производит сбор данных в момент Т2, радар производит сбор данных в момент Т3, следующий после момента Т2. Вычислительное устройство 4 может получать данные обнаружения или не обнаружения отслеживаемой цели 3, переданные радаром, до получения данных обнаружения или не обнаружения отслеживаемой цели 3, переданных камерой, например, если время обработки радара является более коротким, чем время обработки камеры. Предпочтительно вычислительное устройство 4 актуализирует сначала оценку SC достоверности отслеживаемой цели 3 относительно весового коэффициента СР, связанного с обнаружением или не обнаружением отслеживаемой цели 3 камерой. Затем вычислительное устройство актуализирует оценку SC достоверности отслеживаемой цели 3 относительно весового коэффициента СР, связанного с обнаружением или не обнаружением отслеживаемой цели 3 радаром.
Предпочтительно данные, соответствующие обнаруживаемым целям, в частности, данные обнаружения или не обнаружения отслеживаемой цели 3, переданные активным датчиком 2 в вычислительное устройство 4, регистрируются по дате и времени. За заранее определенный период вычислительное устройство 4 записывает данные обнаружения или не обнаружения отслеживаемой цели 3, переданные по завершении каждого этапа 101 считывания активным датчиком 2. Предпочтительно каждый датчик 21, 22 из множества датчиков 21, 22 по меньшей мере один раз является активным датчиком 2 в соответствии с изобретением в течение заранее определенного периода. Каждый датчик 21, 22 является активным датчиком 2 с фиксированной или меняющейся во времени частотностью.
После истечения заранее определенного периода вычислительное устройство 4 осуществляет этапы взвешивания 102 и котировки 103 в хронологическом порядке этапов 101 считывания в зависимости от отмеченных времени и даты данных обнаружения или не обнаружения отслеживаемой цели 3, записанных во время указанного заранее определенного периода.
Каждый этап 102 взвешивания может поочередно осуществляться после каждого этапа 101 считывания. В этом случае вычислительное устройство 4 осуществляет этапы 103 котировки по истечении заранее определенного периода в хронологическом порядке этапов 101 считывания в зависимости от отмеченных времени и даты данных обнаружения или не обнаружения отслеживаемой цели 3, записанных во время указанного заранее определенного периода.
Заявленный способ можно применять на нескольких отслеживаемых целях 3.
Несколько отслеживаемых целей 3 можно обнаружить на единственном этапе 100 обнаружения.
В течение времени на разных этапах 100 обнаружения обнаруживают новые отслеживаемые цели 3.
Как правило, цель, обнаруживаемая активным датчиком 2, является отслеживаемой целью 3, но может быть также целью-препятствием 10 по отношению к другой отслеживаемой цели 3.
Например, на фиг. 4а, 4b и 4с вычислительное устройство 4 транспортного средства 1 хранит в памяти:
- две цели: первую цель С1 и вторую цель С2,
- дерево V1 в окружающей среде 51 транспортного средства 1.
Вариант осуществления изобретения является первым вариантом осуществления.
В соответствии с этапом 101 считывания активный датчик 2 обнаруживает первую цель С1 и вторую цель С2 и передает данные обнаружения в вычислительное устройство 4.
В соответствии с собственными характеристиками 50 активного датчика 2 активный датчик 2 является камерой.
Как показано на фиг. 4а и в соответствии с первым осуществлением этапа 102 взвешивания, отслеживаемая цель 3 является первой целью С1, при этом вторая цель С2 является целью-препятствием 10 в окружающей среде 51 транспортного средства 1. Цель-препятствие 10 и дерево V1 априори не влияют на присвоение весового коэффициента СР отслеживаемой цели 3. Окружающая среда 51 транспортного средства является стандартной, атмосферные условия 52 являются стандартными, в соответствии со свойствами 53 первой цели С1 отслеживаемая цель 3 не является ни пешеходом, ни двухколесным транспортным средством, при этом отслеживаемая цель 3 находится в центре поля действия камеры. Первой цели С1 присваивают весовой коэффициент, равный стандартному бонусному значению BS 3.
Как показано на фиг. 4b и в соответствии с вторым осуществлением этапа 102 взвешивания, отслеживаемая цель 3 является второй целью С2, при этом первая цель С1 является целью-препятствием 10 в окружающей среде 51 транспортного средства 1. Поскольку активный датчик 2 по своим собственным характеристикам 50 является камерой, не обнаружение отслеживаемой цели 3 является предсказуемым, так как первая цель С1 скрывает вторую цель С2. Согласно первому варианту осуществления изобретения, весовой коэффициент СР, присвоенный вычислительным устройством 4 второй цели, равен нулю.
Как показано на фиг. 4с и в соответствии с двойным этапом 103 котировки, связанным с первым и вторым этапами 102 взвешивания, оценка SC достоверности второй цели С2 является неизменной, и оценку SC достоверности первой цели С1 актуализируют, добавляя к ней весовой коэффициент СР, равный 3.
На фиг. 5 показано изменение во времени оценки SC достоверности первой цели С1 и второй цели С2 согласно первому варианту осуществления.
Предположим, что окружающая среда 51 транспортного средства является стандартной, и атмосферные условия 52 являются стандартными. В соответствии со свойствами 53 первой цели С первая цель С1 не является ни пешеходом, ни двухколесным транспортным средством, и первая цель С1 находится в центре поля действия камеры. В соответствии со свойствами 53 второй цели С2, вторая цель С2 не является ни пешеходом, ни двухколесным транспортным средством, при этом вторая цель С2 находится в центре поля действия камеры.
В момент Т1 предполагается, что заявленный способ уже был осуществлен несколько раз и что первая цель С1 имеет оценку SC достоверности, равную 8, а вторая цель С2 имеет оценку достоверности, равную -1.
В момент Т2 способ осуществляют с первой целью С1 в качестве отслеживаемой цели 3, затем с второй целью С2 в качестве отслеживаемой цели 3. Активный датчик 2 является датчиком 22, который представляет собой камеру. Активный датчик 2 обнаруживает первую цель С1, но не обнаруживает вторую цель С2, так как вторая цель С2 скрыта первой целью С1. Вычислительное устройство 4 еще не предусмотрело не обнаружения второй цели С2 камерой, например, поскольку первая цель С1 еще не была подтверждена вычислительным устройством 4, ее оценка SC достоверности еще не достигнута или превысила порог подтверждения, зафиксированный в значении 12. Вычислительное устройство 4 присваивает первой цели С1 весовой коэффициент СР, равный стандартному бонусному значению BS, равному 3. Вычислительное устройство 4 присваивает второй цели С2 весовой коэффициент СР, равный стандартному малусному значению МS, которое равно -2. Оценку SC достоверности первой цели С1 актуализируют, добавляя к ней бонусное значение BS 3, и она достигает, таким образом, 11. Оценку SC достоверности второй цели С2 актуализируют, добавляя к ней малусное значение МS -2, и она понижается после этого до -3.
В момент Т3 способ осуществляют с первой целью С1 в качестве отслеживаемой цели 3, затем с второй целью С2 в качестве отслеживаемой цели 3. Активный датчик 2 является датчиком 23, который представляет собой радар. Активный датчик 2 обнаруживает первую цель С1 и вторую цель С2. Вычислительное устройство 4 присваивает первой цели С1 и второй цели С2 весовой коэффициент СР, равный стандартному бонусному значению BS, которое равно 1. Оценку SC достоверности первой цели С1 актуализируют, добавляя к ней бонусное значение BS 1, и она достигает, таким образом, 12. Оценку SC достоверности второй цели С2 актуализируют, добавляя к ней бонусное значение BS 1, и она повышается, таким образом, до -2.
В момент Т4 способ осуществляют с первой целью С1 в качестве отслеживаемой цели 3, затем с второй целью С2 в качестве отслеживаемой цели 3. Активный датчик 2 опять является датчиком 22, который представляет собой камеру. Активный датчик 2 обнаруживает первую цель С1, но не обнаруживает вторую цель С2, так как вторая цель С2 скрыта первой целью С1. Вычислительное устройство 4 предусмотрело не обнаружение второй цели С2 камерой, поскольку вычислительное устройство на этот раз подтвердило первую цель С1, оценка SC достоверности которой достигла порога подтверждения, установленного в выбранном примере в значении 12. Вычислительное устройство 4 присваивает первой цели С1 весовой коэффициент СР, равный стандартному бонусному значению BS, равному 3. Вычислительное устройство 4 присваивает второй цели С2 нулевой весовой коэффициент СР, который соответствует значению весового коэффициента СР в случае не обнаружения, прогнозируемого вычислительным устройством 4. Оценку SC достоверности первой цели С1 актуализируют, добавляя к ней бонусное значение BS 3, и она достигает, таким образом, 15. Оценку SC достоверности второй цели С2 актуализируют, добавляя к ней нулевой весовой коэффициент СР, при этом оценка SC достоверности остается без изменения.
В момент Т37, отстоящий от момента Т4 на многочисленные осуществления способа, способ осуществляют с первой целью С1 в качестве отслеживаемой цели 3, затем с второй целью С2 в качестве отслеживаемой цели 3. Активный датчик 2 является датчиком 23, который представляет собой радар. Активный датчик 2 обнаруживает первую цель С1 и вторую цель С2. Вычислительное устройство 4 присваивает первой цели С1 и второй цели С2 весовой коэффициент СР, равный стандартному бонусному значению BS, которое равно 1. Оценку SC достоверности первой цели С1 актуализируют, добавляя к ней бонусное значение BS 1, и она достигает, таким образом, 76. Оценку SC достоверности второй цели С2 актуализируют, добавляя к ней бонусное значение BS 1, и она достигает, таким образом, 14. Оценка SC достоверности первой цели С1 является намного более высокой, чем оценка SC достоверности второй цели С2. Это логично, так как оба датчика 22 и 23 обнаруживают вторую цель С2 в отличие от первой цели С1, которая не обнаруживается датчиком 23, являющимся радаром.
Заявленный способ, осуществляемый для всех целей 3, 10 окружающей среды всеми датчиками 21, 22 транспортного средства 1, которые могут обнаруживать цели, и повторяющийся в течение времени, позволяет уверенно определить оценку SC достоверности для целей 3 окружающей среды.
Система обеспечения вождения сможет использовать оценки SC достоверности, присвоенные целям в рамках заявленного способа, эффективно и надежно помогая водителю в вождении или в управлении транспортным средством 1.
Например, система обеспечения вождения сможет учитывать только те цели, оценка SC достоверности которых превышает или равна заранее определенному порогу подтверждения.

Изобретение относится к способу и устройству определения оценки достоверности определения цели в окружающей среде транспортного средства. Технический результат заключается в повышении точности определения цели в окружающей среде транспортного средства. Способ содержит этап (100) обнаружения, на котором датчик из множества датчиков (21, 22) обнаруживает цель (3), подлежащую отслеживанию, и на котором вычислительное устройство (4) инициализирует оценку (SC) достоверности указанной цели (3), подлежащей отслеживанию, по заданному значению, этап (101) сбора, на котором один датчик из множества датчиков (21, 22), называемый активным датчиком (2), собирает данные для обнаружения целей (3, 10) в окружающей среде и передает в вычислительное устройство (4) данные обнаружения, соответствующие обнаруженным целям, при этом отсутствие передачи данных по цели (3), подлежащей отслеживанию, соответствует информации о необнаружении цели (3), подлежащей отслеживанию, этап (102) взвешивания, на котором вычислительное устройство (4) присваивает цели (3), подлежащей отслеживанию, весовой коэффициент (СР) в зависимости от обнаружения или необнаружения цели (3), подлежащей отслеживанию, активным датчиком (2), взвешенный в зависимости от собственных характеристик (50) активного датчика (2) и от окружающей среды (51) транспортного средства (1), этап (103) котировки, на котором вычислительное устройство (4) актуализирует оценку (SC) достоверности цели (3), подлежащей отслеживанию, в зависимости от ранее присвоенного весового коэффициента (СР). 2 н. и 9 з.п. ф-лы, 7 ил., 4 табл.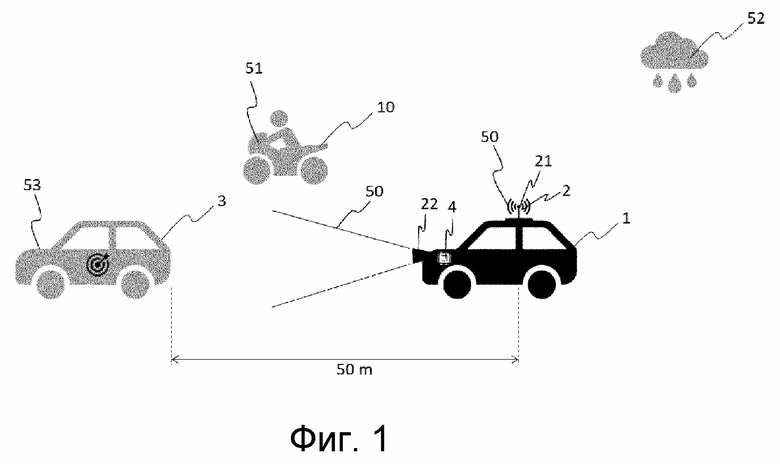
1. Способ определения оценки (SC) достоверности определения цели в окружающей среде транспортного средства (1), при этом транспортное средство (1) содержит вычислительное устройство (4) и множество датчиков (21, 22), выполненных с возможностью обнаружения целей (3, 10) в указанной окружающей среде, при этом способ содержит следующие этапы:
- этап (100) обнаружения, на котором датчик из множества датчиков (21, 22) обнаруживает цель (3), подлежащую отслеживанию, и на котором вычислительное устройство (4) инициализирует оценку (SC) достоверности указанной цели (3), подлежащей отслеживанию, по заданному значению,
- этап (101) сбора, на котором один датчик из множества датчиков (21, 22), называемый активным датчиком (2), собирает данные для обнаружения целей (3, 10) в окружающей среде и передает в вычислительное устройство (4) данные обнаружения, соответствующие обнаруженным целям, при этом отсутствие передачи данных по цели (3), подлежащей отслеживанию, соответствует информации о необнаружении цели (3), подлежащей отслеживанию,
- этап (102) взвешивания, на котором вычислительное устройство (4) присваивает цели (3), подлежащей отслеживанию, весовой коэффициент (СР) в зависимости от обнаружения или необнаружения цели (3), подлежащей отслеживанию, активным датчиком (2), взвешенный в зависимости от собственных характеристик (50) активного датчика (2) и от окружающей среды (51) транспортного средства (1),
- этап (103) котировки, на котором вычислительное устройство (4) актуализирует оценку (SC) достоверности цели (3), подлежащей отслеживанию, в зависимости от ранее присвоенного весового коэффициента (СР).
2. Способ по п. 1, в котором собственные характеристики (50) активного датчика (2) включают в себя тип датчика, поле действия датчика.
3. Способ по п. 1 или 2, в котором окружающая среда (51) транспортного средства (1) содержит другие цели, называемые целями-препятствиями (10), объекты инфраструктуры дороги, по которой движется транспортное средство, зеленые насаждения.
4. Способ по любому из пп. 1-3, в котором весовой коэффициент (СР) взвешивают также на этапе (102) взвешивания в зависимости от атмосферных условий (52), включающих в себя метеорологические условия и освещенность.
5. Способ по любому из пп. 1-4, в котором весовой коэффициент (СР) взвешивают также на этапе (102) взвешивания в зависимости от свойств (53) цели (3), подлежащей отслеживанию, включающих в себя цвет, расстояние до активного датчика (2), место расположения относительно активного датчика (2), класс, размер.
6. Способ по любому из пп. 1-5, в котором оценку (SC) достоверности цели актуализируют на этапе (103) котировки посредством добавления к ней ранее присвоенных весовых коэффициентов (СР).
7. Способ по любому из пп. 1-6, в котором этапы считывания (101), взвешивания (102) и котировки (103) повторяют в течение времени для всех датчиков (21, 22), выполненных с возможностью обнаружения цели (3, 10) в указанной окружающей среде, при этом оценку (SC) достоверности цели (3), подлежащей отслеживанию, актуализируют на каждом этапе (103) котировки в зависимости от весового коэффициента (СР) цели, ассоциированной с активным датчиком (2).
8. Способ по любому из пп. 1-7, в котором весовой коэффициент (СР) цели является функцией вероятности обнаружения (PD) цели (3), подлежащей отслеживанию, и вероятности ложного обнаружения (PFA) цели (3), подлежащей отслеживанию.
9. Способ по любому из пп. 1-8, в котором весовой коэффициент (СР) цели (3), подлежащей отслеживанию, является бонусным значением (BS), превышающим или равным заданному порогу (TH) в случае обнаружения цели (3), подлежащей отслеживанию, активным датчиком (2), причем весовой коэффициент (СР) цели, подлежащей отслеживанию, является манусным фактором (MS), меньшим или равным заданному порогу (TH) в случае необнаружения цели (3), подлежащей отслеживанию, активным датчиком (2).
10. Способ по п. 9, в котором весовой коэффициент (СР) цели (3), подлежащей отслеживанию, равен заданному порогу (ТН) в случае необнаружения отслеживаемой цели (3) активным датчиком (2), при этом указанное необнаружение может быть спрогнозировано вычислительным устройством (4) в зависимости от собственных характеристик (50) активного датчика (2) и от окружающей среды (51) транспортного средства (1).
11. Устройство хранения, хранящее компьютерный программный продукт, содержащий команды программы, вызывающие, при исполнении компьютером, выполнение способа по любому из пп. 1-10.
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Thiemo Alldieck и др., "Context-Aware Fusion of RGB and Thermal Imagery for Traffic Monitoring", 18.11.2016, доступно по URL - https://www.mdpi.com/1424-8220/16/11/1947/pdf?version=1479464138 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| US 9739881 B1, 22.08.2017 | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
