Группа изобретений относится к средствам контроля электрической аппаратуры, линий и элементов на короткое замыкание, обрыв, утечку и неправильное соединение, в частности, элементов с электрическими обмотками, таких как электромагниты гидро (пневмо-) распределителей, а также различных электромагнитных преобразователей. Группа изобретений может быть использована для контроля адресности и фазности сигналов управления рулевыми приводами управляемых авиационных бомб и ракет воздушного, наземного и морского базирования, в частности, находящимися в механически заарретированном состоянии.
Одним из основных требований, предъявляемых к разрабатываемым в настоящее время средствам решения задач управления, как сложными техническими системами в целом, так и изделиями, входящими в их состав, является обеспечение надежности их функционирования, основной способ решения которых - применение соответствующих технических средств, обеспечивающих требуемую защиту от различных несанкционированных действий (см. Калашников А.О. Управление информационными рисками объектов критической информационной инфраструктуры Российской Федерации. // Журнал «Вопросы кибербезопасности», №3 (4), 2014 г., с. 35-41), в том числе и от таких слабоуправляемых процессов, как лояльность и человеческий фактор.
Согласно изученной литературе около 30% отказов различных технических систем прямо или косвенно связаны с человеческим фактором, а 15% - напрямую с человеком (см. Грачева Л.А. Оценка влияния человеческого фактора на надежность сложных технических систем, Международный журнал прикладных и фундаментальных исследований, №11-4, 2014 г., с. 553-554).
Поскольку управляемые авиационные бомбы и ракеты воздушного, наземного и морского базирования (далее УАБ и ракеты) относятся к классам человеко-машинных систем и сложных технических систем, значительное влияние на правильное и надежное функционирование УАБ и ракет на всех этапах их жизненного цикла оказывает человеческий фактор. Так, при изготовлении УАБ и ракет на этапе выполнения сборочных и ремонтно-восстановительных работ возможны ошибки исполнителей, заключающиеся в неправильном подключении электрических соединителей к рулевым приводам, а именно, подключение их с нарушением предусмотренной адресности. Такой ошибке способствует тот факт, что все электрические соединители по конструкции абсолютно одинаковы, как одинаковы по конструкции и все рулевые приводы, используемые в конкретной УАБ или ракете.
Ошибка адресности подключения электрических соединителей к соответствующим рулевым приводам вызовет несоответствие сигналов управления, поступающих на рулевые приводы, требованиям, предъявляемым к электрическим параметрам УАБ и ракет. Такая ошибка всегда приводит к нештатной работе системы управления, и как следствие, формированию непредсказуемой траектории полета УАБ или ракеты в условиях целевого применения, т.е., в конечном итоге, к невозможности выполнения УАБ или ракетой боевой задачи и даже может стать причиной аварии носителя.
Контроль правильности подключении электрических соединителей к рулевым приводам УАБ и ракет можно осуществлять двумя основными способами.
Первый способ основан на визуальном контроле соответствия подключения электрических соединителей к рулевым приводам схеме соединений. Такой контроль осуществляется при проведении пооперационного контроля хода сборки отсека, на котором смонтированы рулевые приводы (рулевой отсек), по соответствующим маркировкам их мест расположения и маркировкам электрических соединителей. Но визуальный контроль правильности подключения электрических соединителей в рулевом отсеке не всегда возможен из-за отсутствия доступа к месту контроля и даже в случае возможности такого доступа не может гарантировать обнаружение ошибки исполнителя работ, поскольку на процесс контроля и его результаты также влияет человеческий фактор.
Второй способ контроля правильности подключении электрических соединителей к рулевым приводам УАБ и ракет основан на проверке соответствия электрических параметров требованиям технических условий при проведении предъявительских, приемосдаточных испытаний УАБ и ракет, а также после выполнения на них ремонтных работ.
Достоверный контроль правильности подключения электрических соединителей к рулевым приводам в таких случаях осуществляется путем контроля фактического отклонения рулевых поверхностей указанных приводов УАБ и ракет в соответствии с заданным тестовым сигналом управления. Но, в случаях, когда в УАБ и ракетах применены однократно разарретируемые рулевые приводы (далее ОРРП), разарретируемые только по команде системы бортового управления УАБ или ракеты в условиях целевого применения, проведение контроля на соответствие электрических параметров таких УАБ и ракет требованиям технических условий (ТУ) не представляется возможным по причине отсутствия механического отклонения рулевых поверхностей из-за нахождения их в механически заарретированном состоянии.
Вместе с тем, из уровня техники известно устройство визуальной идентификации кабельной проводки или трубопроводов, описанное в RU 2294001 С2, 20.02.2007, и предусматривающее в или на каждом шнуре, проводе, кабеле или трубопроводе оптическое волокно, проложенное от одного разъема до другого разъема шнура, провода, кабеля или трубопровода. Первый конец оптического волокна доступен на соответствующем разъеме шнура с возможностью его освещения средством ввода света в волокно. Второй конец оптического волокна доступен на другом конце того же шнура и выполнен с возможностью приема света, введенного в волокно на первом конце. Изогнутые концы оптического волокна утоплены в разъемы. Таким образом может быть получена достоверная идентификация концов шнуров, проводов, кабелей, трубопроводов независимо от их числа и их расположения, без прерывания связи и без прекращения работы.
Недостатком известного устройства является необходимость наличия оптоволокна на проверяемых кабелях и разъемах, а также отсутствие принципиальной возможности использования известного устройства в случае применения унифицированных покупных соединителей (разъемов) различных производителей, встроить в которые оптическое волокно не представляется возможным.
Также из уровня техники известен способ контроля устройств по адресным меткам (А. Пинаев, к.т.н., доцент БГУИР, директор ОДО «Авангардспецмонтаж», М. Альшевский, с.н.с., НИИ ПБ и ЧС МЧС РБ. Журнал "Алгоритм Безопасности" №5, 2006 г. Информационный ресурс Internet: http://polyset.ru.). Контроль по адресным меткам практически идентичен адресным и адресно-аналоговым системам сигнализации. Основная идея состоит в том, что устройства оповещения имеют адресную метку и передают на прибор управления свой адрес и, возможно, состояние. Такой способ контроля позволяет получить возможность автоматического контроля линии и устройств (например, оповещателей), возможность автоматического контроля состояния таких устройств.
Недостатком известного способа контроля по адресным меткам является невозможность его использования в случае применения унифицированных покупных устройств - в данном случае рулевых приводов, встроить адресную и фазную метки в которые не представляется возможным вследствие выполнения требований по их унификации.
Наиболее близким по технической сущности является известный из уровня техники способ непрерывного контроля исправности обмотки электромагнитного механизма, целостности цепей управления такой обмоткой и устройство для его осуществления, описанный в RU 2759588 С1, 15.11.2021. Упомянутые способ и устройство обеспечивают непрерывный автоматический контроль исправности электрической обмотки электромагнитного механизма, в том числе элементов защиты указанной обмотки, при их наличии, также не исключая возможности определения их неправильного подключения, целостности цепей управления такой электрической обмоткой, а также позволяют одновременно с проведением контроля осуществлять управление работой такого электромагнитного механизма, например осуществлять резервирование в автоматическом режиме.
Таким образом, задачей группы изобретений является осуществление сквозного (от системы бортового управления до ОРРП) контроля исправности УАБ и ракет в части проверки адресности и фазности сигналов управления, поступающих от системы бортового управления проверяемых УАБ и ракет на их ОРРП, не исключая воздушно-динамических, пневматических, электромагнитных и релейных рулевых приводов, в том числе на полностью собранных УАБ и ракетах как на этапе производства так и непосредственно перед их применением, при полном исключении влияния человеческого фактора на результаты такого контроля.
На основании изложенного, техническим результатом группы изобретений является:
- проведение сквозного контроля исправности УАБ и ракет, в состав которых входят механически заарретированные в условиях завода-изготовителя ОРРП, разарретируемые по команде системы бортового управления только в ходе целевого применения УАБ и ракет, в части проверки адресности и фазности сигналов управления, поступающих на ОРРП на любом этапе жизненного цикла таких УАБ и ракет;
- отсутствие влияния унифицикации составных частей проверяемых УАБ и ракет на проведение такого контроля;
- выявление неисправностей тракта передачи сигналов управления от системы бортового управления к ОРРП;
- достоверность результатов указанного контроля при исключении влияния на него человеческого фактора.
Технический результат достигается за счет способа контроля адресности и фазности сигналов управления рулевыми приводами управляемых авиационных бомб и ракет воздушного, наземного и морского базирования, который заключается в: формировании датчиками магнитной индукции, установленными на каждом рулевом приводе проверяемой управляемой авиационной бомбы или ракеты, знакопеременных, либо непрерывных разнополярных выходных сигналов в соответствии с направлением вектора магнитной индукции электромагнита, посредством которого осуществляется выбор направления отклонения рулевых поверхностей, при поступлении сигналов управления рулевыми приводами от системы бортового управления проверяемой управляемой авиационной бомбы или ракеты, либо пульта контроля функционирования, согласно циклограмме проверки управляемой авиационной бомбы или ракеты в тестовом режиме; формировании разрешающих выходных сигналов датчиками положения, установленными адресно по одному на каждом рулевом приводе, при их корректной пространственной ориентации относительно узла подвески и строительной оси управляемой авиационной бомбы или ракеты; либо формировании запрещающих выходных сигналов при некорректной установке датчиков положения, выходы которых соединены по схеме «монтажное ИЛИ», а также включении индикатора ошибки при получении запрещающего выходного сигнала от одного и более датчиков положения и запрещении функционирования всех индикаторов контроля фазности при получении на входы бланкирования каждого формирователя сигналов индикации запрещающего выходного сигнала от одного и более датчиков положения; формировании разрешающих выходных сигналов датчиками положения, получении выходных сигналов датчиков магнитной индукции соответствующими формирователями сигналов индикации и включении индикаторов контроля фазности в соответствии с полярностью сигналов управления, поступающих на контролируемые рулевые приводы; сравнении результатов, отображаемых индикаторами фазности сигналов управления с эталонными, отображаемыми на пульте контроля функционирования; принятии решения о соответствии либо несоответствии адресности и фазности сигналов управления, поступающих на рулевые приводы, требованиям технических условий к электрическим параметрам управляемых авиационных бомб и ракет по результатам сравнения.
Технический результат также достигается за счет системы для осуществления способа контроля адресности и фазности сигналов управления рулевыми приводами управляемых авиационных бомб и ракет воздушного, наземного и морского базирования, которая включает: датчики индукции магнитного поля, выполненные с возможностью установки на каждом рулевом приводе проверяемой управляемой авиационной бомб или ракеты, и детектирующие направление вектора магнитной индукции, возникающей при поступлении сигнала управления на соответствующие электромагниты рулевых приводов, посредством которых осуществляется выбор направления отклонения рулевых поверхностей, а также с возможностью формирования на своих выходах сигналов, соответствующих отрицательной или положительной полярности относительно их общего провода, величины которых пропорциональны величинам магнитной индукции, при этом выходы датчиков индукции магнитного поля соединены со входами соответствующих каждому из контролируемых рулевых приводов формирователей сигналов индикации, которые в свою очередь выходами сигналов положительной и отрицательной полярности соединены с соответствующими входами индикаторов фазности сигналов управления; двухполярный источник питания, осуществляющий электропитание датчиков индукции магнитного поля, датчиков положения, формирователей сигналов индикации, индикаторов контроля фазности и индикатора ошибки позиционирования; пульт контроля функционирования, выполненный с возможностью подключения к системам бортового управления управляемых авиационных бомб и ракет, и подачи команд для функционирования системы бортового управления в тестовом режиме согласно заданной циклограмме работы; датчики положения, выполненные с возможностью установки по одному на каждом рулевом приводе, и предназначенные для формирования разрешающего выходного сигнала каждым датчиком положения в случае их корректной пространственной ориентации относительно узла подвески и строительной оси, как управляемых авиационных бомб и ракет, так и их рулевых приводов, а также с возможностью формирования запрещающего выходного сигнала каждым из некорректно установленных датчиков положения, при этом выходы датчиков положения соединены по схеме «монтажное ИЛИ» с входом индикатора ошибки позиционирования, включающегося при поступлении запрещающего сигнала, и с входами бланкирования каждого формирователя сигналов индикации, осуществляемого указанным сигналом, запрещающим функционирование индикаторов контроля фазности.
Настоящим способом предусмотрен контроль величины индукции магнитного поля каждого (левого - первого, либо правого - второго) из электромагнитов, входящих в состав ОРРП УАБ и ракет, возникающей при поступлении на них сигналов управления от системы бортового управления, функционирующей в тестовом режиме по заданной циклограмме и одновременным проведением контроля пространственной, относительно узла подвески такой УАБ или ракеты, ориентации как каждого ОРРП, так и УАБ или ракеты в целом, отображении результатов контроля на индикаторах и сравнении результатов индикации с эталонными, соответствующими норме.
Поскольку контроль функционирования полностью собранной УАБ или ракеты проводится, как правило, при горизонтальной ориентации ее строительной оси, преимущественно но не исключая другой возможной, вертикальная ориентация узла подвески такой УАБ или ракеты совместно с направлением визирования (по направлению, либо против направления полета УАБ или ракеты) и принятым направлением обхода смонтированных на нем ОРРП (против часовой стрелки, либо по часовой стрелке), всегда однозначно определяет номер (адрес) каждого ее ОРРП.
Это позволяет, при установке на все ОРРП УАБ или ракеты датчиков положения (датчиков угла наклона), автоматически сформировать сигналы, соответствующие номеру каждого ОРРП такой УАБ или ракеты, т.е. однозначно определить их адреса.
Для определения фазности сигналов управления каждым ОРРП УАБ или ракеты необходимо установить на все ОРРП датчики магнитной индукции, что позволит определить, какой из электромагнитов любого ОРРП указанной УАБ или ракеты (левый - первый, либо правый - второй) включен / отключен в каждый момент времени.
Ориентация осей чувствительности (измерительных осей) таких датчиков магнитной индукции может быть различной, в зависимости от конструктивных особенностей как ОРРП, так и установленных на них датчиков магнитной индукции. В случае их продольной ориентации (вдоль корпусов ОРРП), оси чувствительности таких датчиков магнитной индукции всегда будут параллельны строительной оси проверяемой УАБ или ракеты. При этом корректное определение фазности сигналов, управляющих каждым ОРРП, будет зависеть от взаимной ориентации направления измерительной оси установленного на ОРРП датчика магнитной индукции по отношению к строительной оси УАБ или ракеты (однонаправлены, либо противоположно направлены).
Так как, в рассмотренном случае, при изменении взаимной ориентации указанных осей определение фазности сигналов управления ОРРП такой УАБ или ракеты станет некорректным (инверсным), что приведет к ошибке, возникает задача обеспечения одной и той же взаимной ориентации измерительных осей всех датчиков магнитной индукции, установленных на ОРРП проверяемой УАБ или ракеты, по отношению к его строительной оси.
Решение этой задачи возможно применением преимущественно, но не ограничиваясь, датчиков магнитной индукции со встроенными световыми индикаторами включения, диаграммы направленности излучения которых ориентированы вдоль их измерительных осей. При этом включенные индикаторы всех установленных на ОРРП УАБ или ракету будут наблюдаться вдоль направления визирования, только если измерительная ось каждого из них ориентирована в одну и ту же сторону, например, для лучшей визуализации, по направлению полета УАБ или ракеты, т.е. со стороны хвостовой части.
Отсутствие видимости какого-либо из таких индикаторов при этом будет свидетельствовать, или о неисправности соответствующего датчика индукции, или о неправильной его установке на ОРРП, т.е. в случае, если указанный датчик индукции развернут в противоположную сторону.
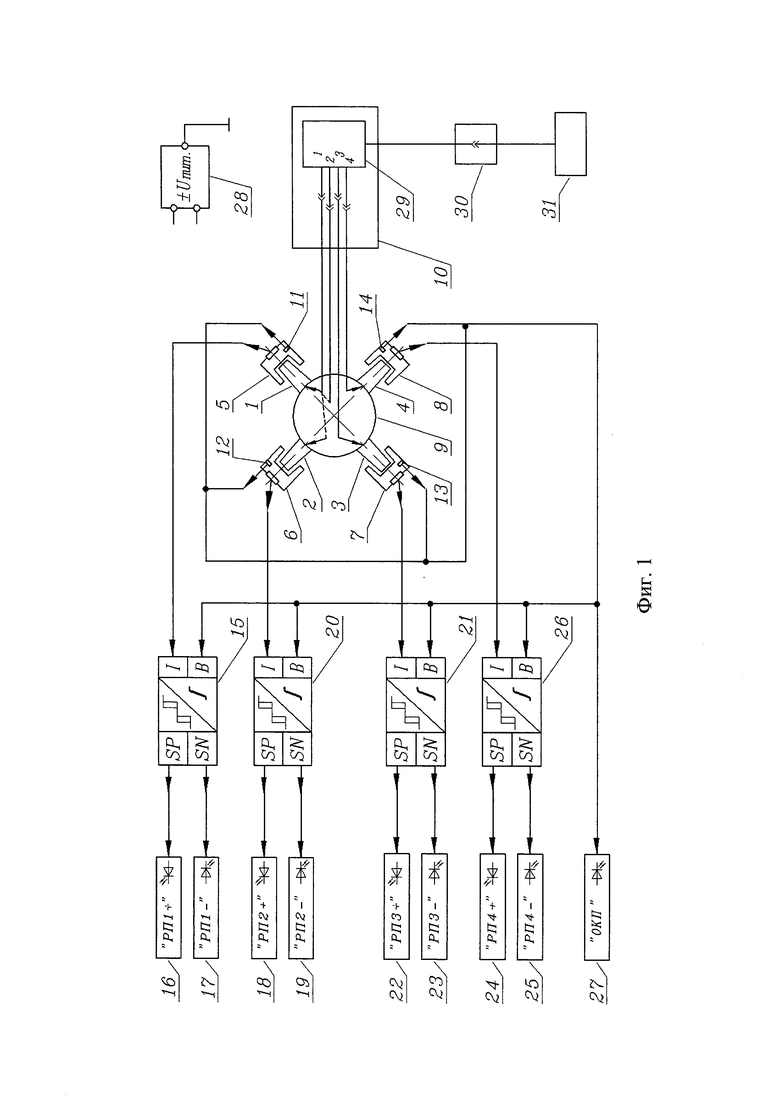
Сущность группы изобретений поясняется фигурой 1, на которой представлена структурная схема системы, реализующей способ контроля адресности и фазности сигналов управления рулевыми приводами управляемых авиационных бомб и ракет.
Как показано на фигуре 1, система для осуществления способа контроля адресности и фазности сигналов управления ОРРП УАБ и ракет включает следующие составные части:
- четыре (соответственно количеству ОРРП (1-4) проверяемой УАБ или ракеты) идентичных датчика магнитной индукции (5-8) со встроенным в каждый из них индикатором включения (не показаны) и элементами крепления, не исключая возможности использования последних в качестве элементов магнитопровода;
- четыре идентичных датчика положения (11-14), установленных по одному на каком-либо из элементов крепления каждого датчика индукции;
- четыре идентичных формирователя сигналов индикации (15, 20, 21 и 26);
- четыре индикатора положительной фазы сигналов управления контролируемых ОРРП УАБ или ракеты (индикаторы контроля фазности): "РП1+" (16), "РП2+" (18), "РП3+" (22) и "РП4+" (24);
- четыре индикатора отрицательной фазы сигналов управления контролируемых ОРРП УАБ или ракеты (индикаторы контроля фазности): "РП1-" (17), "РП2-" (19), "РП3-" (23) и "РП4-" (25);
- индикатор ошибки позиционирования контроля привода проверяемых УАБ или ракеты (индикатор ошибки): «ОКП» (27);
- двухполярный источник питания: «±Uпит.» (28);
- ОРРП (однократно разарретируемые рулевые приводы) (1-4) УАБ или ракеты, смонтированные на рулевом отсеке (9);
- корпус рулевого отсека (9) УАБ или ракеты с частью кабельной сети передачи сигналов управления от системы бортового управления к ОРРП, где штриховыми линиями показано одно из возможных некорректных (ошибочных) соединений;
- система бортового управления (29) УАБ или ракеты с соединителями кабельной сети;
- аппаратурный отсек (10) УАБ или ракеты с частью кабельной сети передачи сигналов управления на ОРРП;
- контрольный соединитель (30) УАБ и ракеты, размещенный в технологическом лючке;
- пульт контроля функционирования (31) УАБ и ракеты.
На фигуре 1 стрелками, отходящими от составных частей системы, обозначены выходы "SP" и "SN" формирователей сигналов индикации, выходы датчиков положения и датчиков индукции, также выходы системы бортового управления, с которых сигналы управления поступают на входы ОРРП. Подходящими к изображениям составных частей стрелками обозначены входы "I" и "В" формирователей сигналов индикации, входы индикаторов контроля фазности и индикатора ошибки, также входы ОРРП.
Далее будут описаны составные части системы, осуществляющей настоящий способ, и их функционирование.
В качестве датчика положения может быть применен как электромеханический, так и электронный элемент. Датчик положения функционирует таким образом, что в случае, когда его измерительная ось оказывается перпендикулярной к горизонту и при этом ориентированной вертикально вниз, на выходе указанного датчика устанавливается высокоимпедансное состояние (Z-состояние). Такое состояние выхода датчика положения сохраняется также при отклонении его измерительной оси от вертикали в одной плоскости, либо в двух плоскостях на небольшой угол (указывается в ТУ на УАБ или ракету), величина которого не оказывает влияния на результаты проведения контроля УАБ и ракеты на функционирование.
Большее отклонение измерительной оси от вертикали, не исключая наличия гистерезиса, вызывает изменение состояния выхода датчика положения - он переходит, преимущественно, в низкоимпедансное состояние, не исключая формирования на нем выходного сигнала с уровнем логического нуля.
В качестве датчика индукции применен предпочтительно, но не исключая магнитоконтактного, аналоговый дифференциальный датчик Холла постоянного / переменного магнитного поля с двухполярным питанием, снабженный элементами крепления к контролируемому ОРРП, в том числе с возможностью их использования также в качестве элементов магнитопровода указанного датчика индукции.
Функционирование такого датчика индукции рассмотрим на примере датчика (5), установленного на ОРРП (1), изображенных на фигуре 1.
Сигнал на выходе (обозначен стрелкой на фигуре 1) указанного датчика индукции, электропитание которого осуществляется от двухполярного источника (28), при отсутствии вектора магнитной индукции как с левой, так и с правой стороны, относительно оси его симметрии (показана штрихпунктирной линией на фигуре 1) и, соответственно, оси симметрии ОРРП (1), отсутствует.
Возникновение вектора магнитной индукции с левой стороны такого датчика индукции приводит к формированию на его выходе сигнала отрицательной, относительно общего провода источника питания (28) полярности, величина которого, в общем случае, пропорциональна величине магнитной индукции.
Возникновение вектора магнитной индукции с правой стороны такого датчика индукции приводит к формированию на его выходе сигнала положительной, относительно общего провода указанного источника, полярности величина которого, в общем случае, так же пропорциональна величине магнитной индукции.
В качестве индикаторов контроля фазности положительной фазы (16, 18, 22 и 24) сигналов управления контролируемых ОРРП применены светоизлучающие диоды (СИД) предпочтительно, но не ограничиваясь, длинноволновой части излучения видимого спектра, например оранжевого или желто-оранжевого цветов свечения (оранжевые). При этом анодные (положительные) выводы таких СИД являются входами указанных индикаторов, а катодные (отрицательные) их выводы соединяются с общим проводом источника питания (28). Включение указанных индикаторов происходит при подаче на их входы сигнала положительной, относительно общего провода источника питания (28), полярности.
В качестве индикаторов контроля фазности отрицательной фазы (17, 19, 23 и 25) сигналов управления контролируемых ОРРП применены СИД предпочтительно, но не ограничиваясь, коротковолновой части излучения видимого спектра, например, сине-зеленого или синего цветов свечения (синие). При этом катодные (отрицательные) выводы таких СИД являются входами указанных индикаторов, а анодные (положительные) их выводы соединяются с общим проводом источника питания (28). Включение указанных индикаторов происходит при подаче на их входы сигнала отрицательной, относительно общего провода источника питания (28), полярности.
В качестве индикатора ошибки позиционирования контроля привода «ОКП» (27) применен индикатор с СИД красного или красно-оранжевого цвета свечения с управлением логическим уровнем и предпочтительно импульсным, но не исключая непрерывного, излучением. Включение такого индикатора происходит при поступлении на его вход сигнала с уровнем логического нуля.
Формирователи сигналов индикации (15, 20, 21 и 26) полностью идентичны, каждый из них представляет собой интегрирующий (в том числе гистерезисный) компаратор двухполярного сигнала, имеющий вход бланкирования "В" (blank) низким логическим уровнем и раздельные выходы сигнала положительной ("SP" - signal positiv) и сигнала отрицательной ("SN" - signal negativ) полярностей.
Высокоимпедансное состояние подсоединенного к входу "В" источника сигнала разрешает формирователю сигналов индикации интегрировать поступающий на его вход "I" (input) сигнал любой полярности.
Сигнал, поступающий на вход "I", является входным для формирователя сигналов индикации, он интегрируется и результат сравнивается с установленными порогами переключения указанного компаратора для каждой его полярности предпочтительно, но не ограничиваясь величиной, равной 1/3 напряжения питания формирователя сигналов индикации.
При этом, в случае непревышения величиной результата интегрирования установленного порога переключения компаратора, сигналы на выходах положительной "SP" и отрицательной "SN" полярности формирователя сигналов индикации, являющихся предпочтительно, но не исключая наличия резисторных ограничителей, источниками стабильных токов (+Iвых) и (-Iвых) соответственно, необходимых для функционирования индикаторов контроля фазности (16-19 и 22-25), преимущественно порядка нескольких миллиампер, но не исключая больших значений отсутствуют и указанные выходы находятся в Z-состоянии.
В случае равенства либо превышения указанной величиной положительной полярности установленного порога компаратора, его выход "SP" переходит в режим работы источника вытекающего (+Iвых) стабильного тока. При этом на выходе "SN" сохраняется Z-состояние.
В случае равенства либо превышения указанной величиной отрицательной полярности установленного порога компаратора, его выход "SN" переходит в режим работы источника втекающего (-Iвых) стабильного тока. При этом на выходе "SP" сохраняется Z-состояние.
Сигнал, поступающий на вход "В", является запрещающим (бланкирующим) сигналом - он сбрасывает интегратор, т.е. разряжает интегрирующую емкость и удерживает ее в таком состоянии, независимо от полярности сигнала на его входе "I", на все время воздействия поступающего на вход «В» сигнала. При этом, питание входа "В" формирователя сигналов индикации осуществляется предпочтительно, но не исключая резистивного ограничителя, стабильным втекающим током его внутреннего источника, порядка величины входного тока уровня "1" логики TTL, т.е. вход "В" "подтянут" к положительной цепи источника питания формирователя сигналов индикации.
Сброс интегратора происходит при поступлении на его вход "В" сигнала логического нуля. При этом сигналы на выходах "SP" и "SN" становятся равными нулю - указанные выходы переходят в Z-состояние.
Система, осуществляющая настоящий способ, состоит из двух логически объединенных каналов: канала контроля адресности и канала контроля фазности сигналов управления ОРРП, первый из которых имеет приоритет над каналом контроля фазности и отображением его результатов индикаторами контроля фазности (16-19 и 22-25), осуществляя самоконтроль наличия влияния человеческого фактора т.е. возможных ошибок позиционирования контролируемых ОРРП в автоматическом режиме, не используя для этого сигналы управления контролируемыми ОРРП УАБ или ракеты.
Абсолютная достоверность результатов самоконтроля также обеспечивается конструктивным выполнением каждого датчика индукции таким образом, что он может находиться только в горизонтальном или в вертикальном, относительно оси его симметрии положении в случае, если указанный датчик индукции не установлен на какой-либо из ОРРП проверяемой УАБ и ракеты.
При этом соответствующий датчик положения, установленный на элементе крепления такого датчика индукции, всегда будет повернут на угол ±45 градусов относительно его корректного (рабочего) положения, показанного на фигуре 1.
В случае некорректной установки каких-либо из датчиков индукции (5-8) с соответствующими им датчиками положения (11-14) на контролируемые ОРРП (1-4) проверяемой УАБ или ракеты, что приведет к неправильному определению адресов некоторых из них, включится индикатор «ОКП» 27, а все индикаторы контроля фазности (16-19 и 22-25) при этом будут находиться в выключенном состоянии.
Система, осуществляющая настоящий способ, структурная схема которой представлена на фигуре 1, функционирует следующим образом.
Проверяемую УАБ или ракету устанавливают в соответствии с необходимой ориентацией ее строительной оси согласно ТУ и изображенной на фигуре 1 пространственной ориентацией рулевого отсека (9) с установленными на нем ОРРП (1-4). Затем подключают к указанной УАБ или ракете пульт контроля функционирования (31) через контрольный соединитель (30), размещенный в технологическом лючке, после чего производят включение напряжения питания указанной УАБ или ракеты и пульта контроля функционирования.
С указанного пульта контроля функционирования задают системе бортового управления УАБ или ракеты тестовый режим функционирования соответственно заданной циклограмме для проведения сквозного (от системы бортового управления до ОРРП) контроля исправности указанной УАБ или ракеты, в части проверки адресности и фазности сигналов управления, поступающих на ее ОРРП.
При включении источника двухполярного питания (28) и установленных на ОРРП (1-4) проверяемой УАБ или ракеты датчиков индукции (5-8) с закрепленными на них, соответственно, датчиками положения (11-14), как показано на фиг. 1, на выходе каждого такого датчика положения устанавливается высокоимпедансное состояние (Z-состояние).
При этом, поскольку выходы всех указанных датчиков положения соединены по схеме «монтажное ИЛИ», также соединенные с входом "В" каждого из формирователей сигналов индикации (15, 20, 21 и 26), также соединенные с входом индикатора «ОКП» (27), указанным формирователям сигналов индикации разрешено интегрировать поступающие на их входы "I" сигналы любой полярности.
Индикатор «ОКП» (27) в этом случае находится в выключенном состоянии, свидетельствуя о корректном позиционировании всех датчиков, установленных на контролируемых ОРРП.
При отсутствии сигналов управления, поступающих от системы бортового управления на указанные ОРРП, установленные на корпусе рулевого отсека (9) проверяемой УАБ или ракеты, векторы магнитной индукции как с левой, так и с правой сторон, относительно осей симметрии таких ОРРП и, соответственно, осей симметрии соответствующих датчиков индукции отсутствуют.
Все индикаторы контроля фазности (16-19 и 22-25) в этом случае находятся в выключенном состоянии, в соответствии с описанным выше функционированием формирователей сигналов индикации (15, 20, 21 и 26) и указанных индикаторов, поскольку выходные сигналы каждого датчика индукции (5-8) отсутствуют.
В случае поступления от системы бортового управления на какой-либо из ОРРП непрерывного сигнала управления фазой, в зависимости от заданной (отрицательной или положительной) для такого ОРРП полярности включится, соответственно, либо его левый (первый), либо правый (второй) электромагнит, индукция магнитного поля которого преобразуется датчиком индукции, установленным на указанном ОРРП, в непрерывный выходной сигнал соответствующей полярности, что отражено в приведенном выше описании функционирования датчиков индукции.
Сигнал с выхода такого датчика индукции, соединенного со входом "I" соответствующего формирователя сигналов индикации, по его выходу "SN" соединенному со входом соответствующего индикатора контроля фазности отрицательной фазы сигнала управления, также по его выходу "SP" соединенному со входом соответствующего индикатора контроля фазности положительной фазы сигнала управления, приведет к включению одного из указанных индикаторов контроля фазности в соответствии с описанным выше их функционированием. При этом непрерывное включение левых (первых) электромагнитов контролируемых ОРРП вызывает включение «синих» (как описано ранее) индикаторов контроля фазности, а включение «оранжевых» индикаторов контроля фазности происходит при непрерывном включении правых (вторых) электромагнитов контролируемых ОРРП.
Включение указанных индикаторов всегда будет происходить с задержкой по времени относительно начала поступающего сигнала управления, которая определяется параметрами интегрирующего компаратора формирователя сигналов индикации.
Эта задержка, предпочтительно от одной до трех секунд, но не исключая других возможных значений, должна учитываться в циклограмме работы системы бортового управления, функционирующей в тестовом режиме.
В случае поступления от системы бортового управления на какой-либо из ОРРП импульсного сигнала управления фазой со скважностью, преимущественно, но не ограничиваясь величиной, равной двум, соответствующей нулевой для такого ОРРП полярности, его левый (первый), либо правый (второй) электромагниты будут включаться и отключаться попеременно, с частотой указанного сигнала и на выходе датчика индукции сформируется знакопеременный выходной сигнал. Такой сигнал, поступающий на вход "I" формирователя сигналов индикации, не вызовет включения ни одного из индикаторов контроля фазности, подсоединенных к его выходам "SN" и "SP", т.к. из-за его интегрирования и, в том числе наличия гистерезиса, на них установятся Z-состояния. Это будет свидетельствовать об исправности как каждого из электромагнитов контролируемого ОРРП и управляющих ими цепей, так и внутренних ОРРП-каналов управления. При этом, в результате неисправности какого-либо из указанных каналов или цепей управления контролируемого ОРРП вызванной обрывом, т.е. приводящей к невключению первого (левого) электромагнита такого ОРРП сигналом отрицательной фазы управления, на время действия такого сигнала включится индикатор контроля фазности положительной фазы сигнала управления, т.е. результат индикации контроля в этом случае станет инверсным.
В результате неисправности какого-либо из указанных каналов или цепей управления контролируемого ОРРП, также вызванной обрывом, но приводящей к невключению второго (правого) электромагнита такого ОРРП сигналом положительной фазы управления, на время действия такого сигнала включится индикатор контроля фазности отрицательной фазы сигнала управления и результат индикации контроля также станет инверсным.
Возникновение неисправности какого либо из указанных каналов или цепей управления контролируемого ОРРП, вызванной коротким замыканием, либо пробоем ключа управления электромагнитом такого ОРРП, приводящей к непрерывному включению указанного электромагнита, или к его неотключению после прекращения действия сигнала управления фазой, индикатор контроля фазности сигнала управления, соответствующий номеру неисправного электромагнита такого ОРРП - первому (левому), либо второму (правому) будет включен в течение всего времени проведения контроля.
Таким образом, обеспечивается осуществление сквозного (от системы бортового управления до ОРРП) контроля исправности УАБ и ракет в части проверки адресности и фазности сигналов управления, поступающих от системы бортового управления УАБ или ракеты на их ОРРП (однократно разарретируемые рулевые приводы), механически заарретированные в условиях завода-изготовителя, не исключая полностью собранных УАБ и ракет, как на этапе производства так и непосредственно перед их применением, при полном исключении влияния человеческого фактора на результаты такого контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство инициирования воздушно-динамического рулевого привода управляемой авиабомбы, способ проверки готовности воздушно-динамического рулевого привода перед сбросом управляемой авиабомбы, воздушно-динамический рулевой привод и аппаратура управления воздушно-динамическим рулевым приводом авиабомбы | 2020 |
|
RU2748828C1 |
| СИСТЕМА ИНДИКАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2206872C2 |
| Устройство контроля параметров движения транспортного средства (чёрный ящик) | 2022 |
|
RU2787806C1 |
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2006 |
|
RU2339905C2 |
| Система управления вооружением летательных аппаратов | 2021 |
|
RU2780716C1 |
| СИСТЕМА НАВЕДЕНИЯ ВЫСОКОТОЧНОГО ОРУЖИЯ | 2015 |
|
RU2596173C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ РАКЕТОЙ И РАКЕТА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241949C2 |
| Устройство для контроля функционирования логических блоков | 1986 |
|
SU1327107A1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ СТРЕЛЬБЫ ГРУППЫ ПЕРЕНОСНЫХ ЗЕНИТНО-РАКЕТНЫХ КОМПЛЕКСОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2289083C2 |
| Способ проверки пусковых установок с лазерно-лучевым каналом управления и система для ее осуществления | 2024 |
|
RU2837133C1 |
Группа изобретений относится к способу и системе контроля адресности и фазности сигналов управления (АФСУ), поступающих на находящиеся в механически заарретированном заводом-изготовителем состоянии рулевые приводы (РП) управляемых авиационных бомб и ракет воздушного, наземного и морского базирования. Группа изобретений позволяет осуществлять контроль АФСУ без разарретирования и фактического отклонения РП в соответствии с заданными сигналами управления (разарретирование РП возможно только одноразово в ходе целевого применения объекта по прямому назначению). Контроль АФСУ осуществляется использованием датчиков магнитной индукции, установленных на каждом рулевом приводе объекта, формирующих знакопеременные, либо непрерывные разнополярные выходные сигналы в соответствии с направлением вектора магнитной индукции электромагнита, входящего в состав РП и посредством которого осуществляется выбор направления отклонения РП; формирования разрешающих выходных сигналов датчиками положения, установленными адресно по одному на каждом рулевом приводе, при их корректной пространственной ориентации, либо формирования запрещающих выходных сигналов при некорректной установке датчиков положения, выходы которых соединены по схеме «монтажное ИЛИ», а также включения индикатора ошибки при получении запрещающего выходного сигнала и запрещения функционирования всех индикаторов контроля фазности при получении на входы бланкирования каждого формирователя сигналов индикации запрещающего выходного сигнала от одного и более датчиков положения; получение выходных сигналов датчиков магнитной индукции соответствующими формирователями сигналов индикации и включение индикаторов контроля фазности в соответствии с полярностью сигналов управления контролируемых рулевых приводов при условии формирования разрешающих выходных сигналов датчиками положения. 2 н.п. ф-лы, 1 ил.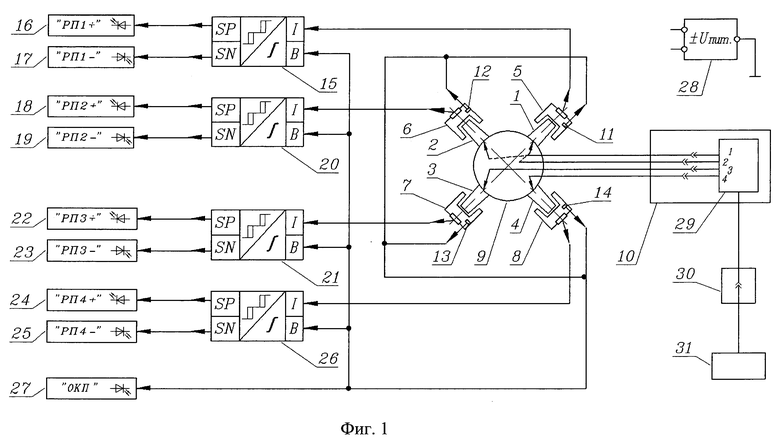
1. Способ контроля адресности и фазности сигналов управления рулевыми приводами управляемых авиационных бомб и ракет воздушного, наземного и морского базирования, заключающийся в:
формировании датчиками магнитной индукции, установленными на каждом рулевом приводе проверяемой управляемой авиационной бомбы или ракеты, знакопеременных либо непрерывных разнополярных выходных сигналов в соответствии с направлением вектора магнитной индукции электромагнита, посредством которого осуществляется выбор направления отклонения рулевых поверхностей, при поступлении сигналов управления на рулевые приводы от системы бортового управления проверяемой управляемой авиационной бомбы или ракеты, либо пульта контроля функционирования согласно циклограмме проверки управляемой авиационной бомбы или ракеты, в тестовом режиме;
формировании разрешающих выходных сигналов датчиками положения, установленными адресно по одному на каждом рулевом приводе, при их корректной пространственной ориентации относительно узла подвески и строительной оси управляемой авиационной бомбы или ракеты;
либо формировании запрещающих выходных сигналов при некорректной установке датчиков положения, выходы которых соединены по схеме «монтажное ИЛИ», а также включении индикатора ошибки при получении запрещающего выходного сигнала от одного и более датчиков положения и запрещении функционирования всех индикаторов контроля фазности при получении на входы бланкирования каждого формирователя сигналов индикации запрещающего выходного сигнала от одного и более датчиков положения;
формировании разрешающих выходных сигналов датчиками положения, получении выходных сигналов датчиков магнитной индукции соответствующими формирователями сигналов индикации и включении индикаторов контроля фазности в соответствии с полярностью сигналов управления контролируемых рулевых приводов;
сравнении результатов, отображаемых индикаторами фазности сигналов управления с эталонными, отображаемыми на пульте контроля функционирования;
принятии решения о соответствии либо несоответствии адресности и фазности сигналов управления, поступающих на рулевые приводы, требованиям технических условий к электрическим параметрам управляемых авиационных бомб и ракет по результатам сравнения.
2. Система для осуществления способа по п. 1, включающая:
датчики индукции магнитного поля, выполненные с возможностью установки на каждом рулевом приводе проверяемой управляемой авиационной бомбы или ракеты, и детектирующие направление вектора магнитной индукции, возникающей при поступлении сигнала управления на соответствующие электромагниты рулевых приводов, посредством которых осуществляется выбор направления отклонения рулевых поверхностей, а также с возможностью формирования на своих выходах сигналов, соответствующих отрицательной или положительной полярности относительно их общего провода, величины которых пропорциональны величинам магнитной индукции, при этом выходы датчиков индукции магнитного поля соединены с входами соответствующих каждому из контролируемых рулевых приводов формирователей сигналов индикации, которые, в свою очередь, выходами сигналов положительной и отрицательной полярности соединены с соответствующими входами индикаторов фазности сигналов управления;
двухполярный источник питания, осуществляющий электропитание датчиков индукции магнитного поля, датчиков положения, формирователей сигналов индикации, индикаторов контроля фазности и индикатора ошибки позиционирования;
пульт контроля функционирования, выполненный с возможностью подключения к системам бортового управления управляемых авиационных бомб и ракет, и подачи команд для функционирования системы бортового управления в тестовом режиме согласно заданной циклограмме работы;
датчики положения, выполненные с возможностью установки по одному на каждом рулевом приводе, и предназначенные для формирования разрешающего выходного сигнала каждым датчиком положения в случае их корректной пространственной ориентации относительно узла подвески и строительной оси, как управляемых авиационных бомб и ракет, так и их рулевых приводов, а также с возможностью формирования запрещающего выходного сигнала каждым из некорректно установленных датчиков положения, при этом выходы датчиков положения соединены по схеме «монтажное ИЛИ» с входом индикатора ошибки позиционирования, включающегося при поступлении запрещающего сигнала, и с входами бланкирования каждого формирователя сигналов индикации, осуществляемого указанным сигналом, запрещающим функционирование индикаторов контроля фазности.
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ УПРАВЛЯЕМОЙ РАКЕТЫ, ВРАЩАЮЩЕЙСЯ ПО КРЕНУ, И АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2243494C2 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ АППАРАТУРЫ УПРАВЛЯЕМОЙ РАКЕТЫ И АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2289781C1 |
| Гальванический способ пропитки древесины антисептиками | 1961 |
|
SU149552A1 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АВТОКОЛЕБАТЕЛЬНЫХ РУЛЕВЫХ ПРИВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2145052C1 |
| CN 106645940 A, 10.05.2017 | |||
| CN 202204892 U, 25.04.2012. | |||
