Изобретение относится к оборонной технике и, в частности, к средствам борьбы с малоразмерными целями и может быть использовано в системах управления ракетами, формирующими на борту команды управления, например, в лучевой системе теленаведения.
В настоящее время широко применяют многоканальные способы и системы управления ракетами, которые основаны на различии структуры сигнала, например, при использовании время-импульсной модуляции (ВИМ) сигналов, которые формируются с помощью шифраторов. Такими признаками различия структуры сигналов с ВИМ являются число импульсов в кодовой группе, образующих сигнал, длительность импульсов и величина временных интервалов между отдельными импульсами. Причем в качестве линии связи между пунктом управления и ракетами применяют, например, радиолинии с дополнительной амплитудной модуляцией несущего колебания (ВИМ-АМ), либо оптические с ВИМ сигналов.
Известен способ формирования команд управления на борту ракеты и ракета для его осуществления [1], выбранные в качестве прототипа. Способ формирования команд заключается в том, что выделяют сигналы наведения (принимают и преобразуют электромагнитное излучение в электрические импульсы, которые декодируют по тангажу и курсу), а затем формируют команды управления рулевым приводом (РП).
Ракета, основанная на этом способе, содержит последовательно соединенные приемник, аппаратуру разделения каналов и декодирования по курсу и тангажу, преобразователь команд (усилитель-преобразователь) и рулевой (силовой) привод, при этом рулевой привод выполнен как сумматор, выход которого через усилитель постоянного тока (УПТ) соединен с обмоткой управления рулевого механизма, кинематически связанного с движком потенциометра обратной связи, выход (движок) которого подключен через усилитель обратной связи ко второму входу сумматора. При этом для преобразования управляющего электрического сигнала в механическое перемещение рулей в бортовой системе формирования команд управления использован электрический двигатель постоянного тока.
В настоящее время для преобразования управляющего электрического сигнала в механическое перемещение рулей применяют рулевой привод, в котором используется широтно-импульсный метод регулирования, т.е. широтно-импульсная модуляция (ШИМ) сигналов управления. Этот метод повышает быстродействие РП за счет форсированного отключения тока, протекающего через обмотку (обмотки) электромагнитов, и заключается в увеличении напряжения на нагрузке (обмотке), обусловленном электродвижущей силой (э.д.с.) самоиндукции [2].
Недостатком известных способа формирования команд управления на борту ракеты и ракеты для его осуществления при использовании в рулевом приводе широтно-импульсного метода регулирования является ухудшение помехоустойчивости при формировании команд управления, обусловленное импульсами э.д.с. самоиндукции в обмотках управления РП, наводящих паразитные импульсы (помехи) в приемный тракт.
Задачей настоящего изобретения (способа и устройства) является повышение помехоустойчивости при использовании ШИМ сигналов управления.
Поставленная задача решается за счет того, что в способе формирования команд управления ракетой выделяют сигналы наведения, формируют команды управления рулевым приводом, команды управления задают в виде релейного ШИМ сигнала, вырабатывают импульсы, передний фронт которых формируют до момента возникновения импульсов э.д.с. самоиндукции в обмотках управления рулевым приводом, вызывающих помеху, задний фронт импульсов формируют после момента окончания помехи, вырабатываемыми импульсами запрещают прохождение помехи в команды управления ракетой.
Ракета, реализующая способ, содержит последовательно соединенные аппаратуру разделения каналов и декодирования по курсу и тангажу, преобразователь команд и одноканальный РП, а также приемник, введены первый и второй формирователи импульсов и схема запрета, при этом выход схемы запрета подключен ко входу аппаратуры разделения каналов и декодирования по курсу и тангажу, первый вход схемы запрета соединен с выходом приемника, второй и третий входы схемы запрета соединены с выходами соответственно первого и второго формирователя импульсов, входы которых подключены соответственно к первому и второму выходам преобразователя команд.
Рулевой привод может содержать второй канал рулевого привода, идентичный первому, третий и четвертый формирователи импульсов, выходы которых соединены соответственно с четвертым и пятым входами схемы запрета, при этом третий и четвертый выходы преобразователя команд подключены соответственно к первому и второму входам второго канала рулевого управления и входам третьего и четвертого формирователей импульсов.
Заявленный способ реализуется следующим образом. Импульсное электромагнитное излучение с ВИМ-АМ, либо ВИМ, например, передают с пункта управления в виде команд наведения ракеты на цель. Стартовавшая ракета принимает и преобразует электромагнитное излучение в электрические импульсы с ВИМ, а затем их усиливает.
Усиленные импульсы с ВИМ декодируют по курсу “Z” и тангажу “Y” в течение времени, при котором отсутствуют импульсы э.д.с. самоиндукции, а затем формируют команды управления РП (двухканальные для декартового рулевого управления либо одноканальные для полярного рулевого управления). При формировании команд управления используют релейный сигнал, изменяемый в соответствии с величиной команды наведения, по закону ШИМ. При этом, например, для одноканального РП, содержащего две обмотки управления, подключенные к выходам соответственно первого и второго ключевых усилителей мощности РП (работающих, например, в противофазе), из импульсных сигналов на входах этих двух ключевых усилителей, вызывающих отключение соответствующей обмотки управления, а точнее их фронтов формируют запрещающие импульсы.
Таким образом, запрещающие импульсы начинают формировать немного ранее начала возникновения импульсов э.д.с. самоиндукции, а заканчивают немного позже окончания импульсов помехи, вызываемой э.д.с. самоиндукции. Следовательно, в момент возникновения импульсов э.д.с. самоиндукции, когда они наводят ложные импульсы на входе приемного тракта, формируют запрещающие импульсы, которые не пропускают их на вход декодера, что исключает выделение ложных сигналов наведения на ракете, а значит, и формирование ложных команд.
Предлагаемое изобретение поясняется чертежами (фиг.1, 2 и 3).
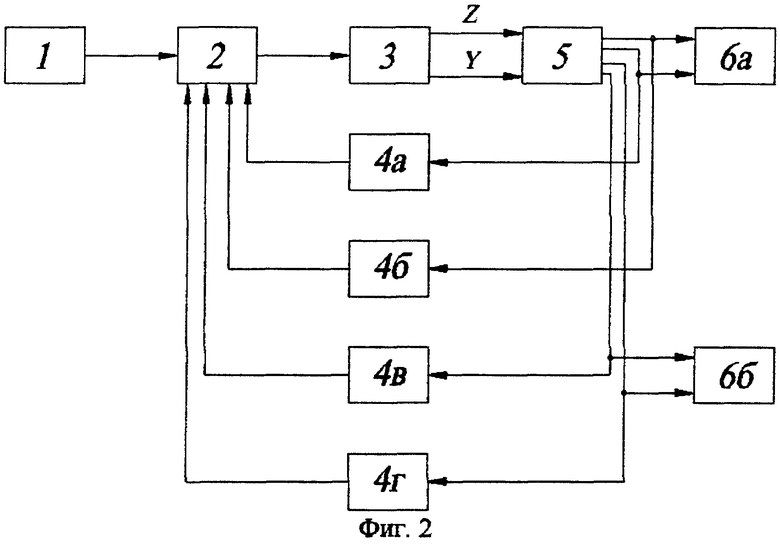
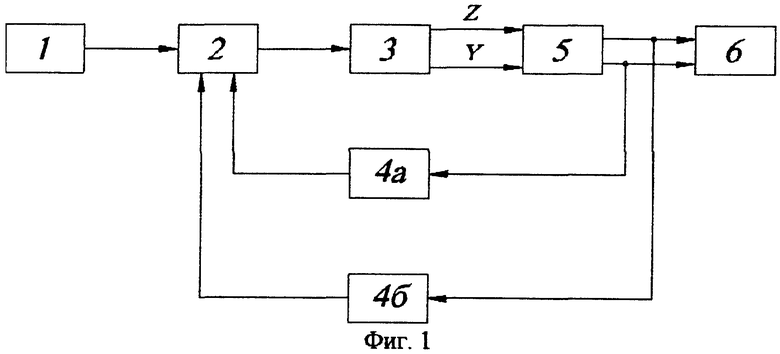
На фиг.1 представлена структурная электрическая схема ракеты с одноканальным РП. На фиг.2 представлена структурная электрическая схема ракеты с двухканальным РП.
На фиг.1 и 2 представлены: 1 - приемник; 2 - схема запрета; 3 -аппаратура разделения каналов и декодирования по курсу “Z” и тангажу “Y”; 4а...4г - соответственно, первый, второй, третий и четвертый формирователи импульсов; 5 - преобразователь команд; 6 – одноканальный РП; 6а и 6б - первый и второй каналы двухканального РП.
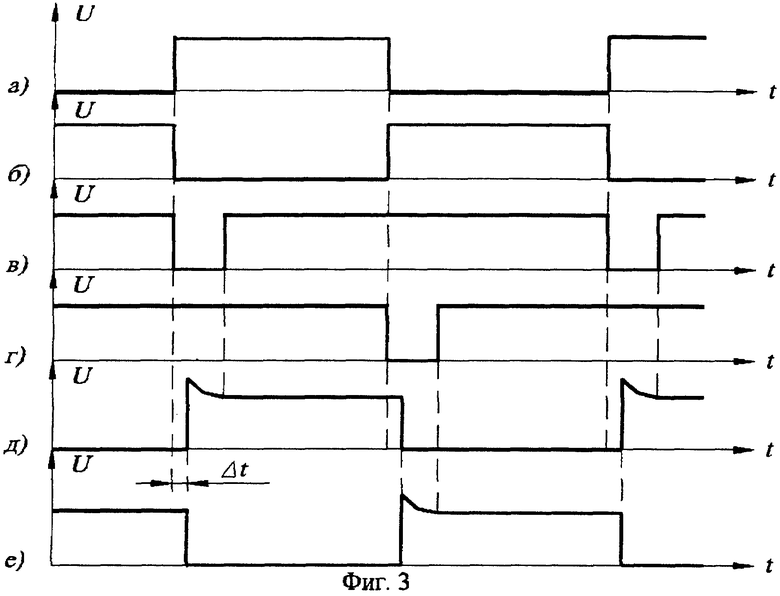
На фиг.3 приведены эпюры сигналов, где представлены: "а" и "б" -сигналы на первом и втором выходах преобразователя команд 5; "в" и "г"- сигналы на выходах первого 4а и второго 46 формирователя импульсов; "д" и "е" - сигналы на выходах усилителя мощности, подключенного к первой и второй обмоткам управления РП.
В заявленной ракете (фиг.1) последовательно соединены аппаратура разделения каналов и декодирования по курсу “Z” и тангажу “Y” 3, преобразователь команд 5 и одноканальный РП 6. Выход приемника 1 подключен к первому входу схемы запрета 2, выход которой соединен со входом аппаратуры разделения каналов и декодирования 3. Первый и второй выходы преобразователя команд 5 подключены ко входам соответственно первого и второго формирователя импульсов 4а и 4б, выходы которых соединены соответственно со вторым и третьим входами схемы запрета 2.
В ракете (фиг.2), реализующей способ может быть введен второй канал рулевого привода 6б, идентичный первому 6а, а также третий и четвертый формирователи импульсов 4в и 4г соответственно. Выходы формирователей импульсов 4в и 4г соединены с четвертым и пятым входами схемы запрета 2 соответственно. Третий и четвертый выходы преобразователя команд 5 подключены к первому и второму входам второго канала рулевого управления 6б соответственно и входам соответственно третьего 4в и четвертого 4г формирователей импульсов.
Приемник 1, аппаратура разделения каналов и декодирования по курсу и тангажу 3 и преобразователь команд 5 могут быть выполнены, например, как в прототипе [1]. Одноканальный РП 6 либо двухканальный РП 6а, 6б могут быть выполнены как в прототипе с учетом ШИМ сигнала, при этом одноканальный РП 6 либо один канал 6а или 6б содержат две обмотки управления соответственно двух электромагнитов, связанных с одной парой рулей. Первая и вторая обмотки подключены соответственно к выходам первого и второго ключевого усилителя мощности, на входы которых в противофазе подается сигнал управления соответственно с первого и второго выхода преобразователя команд 5. Таким образом, преобразователь команд 5 дополнительно преобразует линейный сигнал управления РП в релейный по закону ШИМ.
Формирователи импульсов 4а...4г могут быть выполнены как ждущие мультивибраторы, ко входу которых подключены дифференцирующие RC-цепочки. Схема запрета 2 может быть выполнена как трехвходовая (для фиг.1) или пятивходовая (для фиг.2) логическая схема “И”.
Ракета работает следующим образом. Приемник 1 принимает электромагнитное излучение, передаваемый, например, с пункта управления сигнал с время-импульсной модуляцией поднесущего колебания и амплитудной модуляцией несущего (ВИМ-АМ).
Этот сигнал преобразуется по частоте, усиливается, поддерживается автоматической регулировкой усиления постоянным по амплитуде, демо-дулируется и далее импульсы положительной полярности (единичный логический уровень) с ВИМ, нормированные по амплитуде и длительности, поступают на первый вход схемы запрета 2. При наличии единичного логического уровня на втором и третьем входах схемы запрета 2 (эпюры "в" и "г" на фиг.3) эти нормированные импульсы поступают на вход аппаратуры разделения каналов и декодирования по курсу “Z” и тангажу “Y” 3. В аппаратуре 3 сигнал с ВИМ декодируется по курсу “Z” и тангажу “Y”. Сигналы “Z” и “Y” с выходов аппаратуры 3, несущие информацию о величине команд управления в декартовой системе координат, например, пункта управления “ZOY” поступают соответственно на первый и второй входы преобразователя команд 5.
Преобразователь команд 5 с помощью интегро-дифференцирующих звеньев формирует заданные динамические свойства системы управления ракетой, с помощью гироскопического датчика крена (вращения) преобразует команды по тангажу и курсу в систему координат ракеты, например, вращающейся по крену, приводя их к виду, удобному для работы РП (одноканального фиг.1, либо двухканального фиг.2), при этом формируется сигнал управления в виде ШИМ сигнала, например, в каждую 1/4 кренового периода (при вращении ракеты по крену) по курсу “Z” и тангажу “Y” соответственно. Причем на первом и втором выходах преобразователя 5 формируются ШИМ сигналы в противофазе (эпюры "а" и "б" на фиг.3 соответственно).
Сигналы с первого и второго выходов преобразователя команд 5 поступают на первый и второй ключевые усилители мощности РП 6 или ба и 6б. Первый и второй ключевые усилители мощности идентичны, при этом выходные каскады выполнены, например, на транзисторах по схеме с общим эмиттером. К коллекторам первого и второго выходных транзисторов подключены соответственно первая и вторая обмотки управления РП.
Таким образом, по первой и второй обмоткам поочередно протекает ток, вызванный поочередным подключением этих обмоток через выходные транзисторы к источнику питания. Сигналы на коллекторах выходных транзисторов приведены на эпюрах "д" и "е" на фиг.3. Как следует из них, импульсы э.д.с. самоиндукции (например, величиной до единиц киловольт) возникают в момент времени, когда размыкается выходной транзисторный ключ, т.е. на его коллекторе появляется перепад напряжения из низкого уровня в высокий. Поэтому из выходного сигнала преобразователя команд 5 (формирующего этот перепад напряжения, с учетом запаздывания на величину Δt, учитывающую время прохождения фронта сигнала через предварительные и выходные усилительные каскады ключевого усилителя РП), формирователями импульсов 4а и 4б вырабатывают импульсы с нулевым логическим уровнем (эпюры "в" и "г" на фиг.3). Эти импульсы на время действия э.д.с. самоиндукции запрещают прохождение любого импульсного сигнала через схему запрета 2, что исключает формирование ложных кодовых комбинаций, а значит, и искажение команд.
Следовательно, исключение наводок от рулевого привода позволяет применять мощные высоковольтные транзисторы в выходных каскадах, что уменьшает время отключения обмоток, а значит, повышает быстродействие РП за счет повышения "отношения допустимого напряжения на транзисторе к номинальному напряжению нагрузки (номинальному напряжению питания)" [2].
Таким образом, в связи с тем, что в способе формирования команд управления ракетой задают команды управления в виде ШИМ сигнала, вырабатывают импульсы, передний фронт которых формируют до момента возникновения импульсов э.д.с. самоиндукции в обмотках управления РП, вызывающих помеху, задний фронт импульсов формируют после момента окончания помехи, вырабатываемыми импульсами запрещают прохождение помехи в команды управления ракетой, исключено влияние внутренних помех при формировании команд управления.
Введение в ракету формирователей импульсов и схемы запрета исключило влияние внутренних помех, создаваемых РП, т.е. повысило помехоустойчивость при использовании ШИМ сигналов управления, при этом повышено быстродействие РП за счет допустимости увеличения э.д.с. самоиндукции на обмотках РП, вызывающей соответственно увеличение амплитуды ложных импульсов.
Источники информации
1. Основы радиоуправления. Под ред. Вейцеля В.А. и Типугина В.Н. М., Советское радио, 1973 г., стр.43, 44, рис.1.20, 1.21; стр.49-51, рис.1.27, 1.28; стр.246-248, рис.4.28.
2. Л.И.Леоненко Полупроводниковые форсирующие схемы, М., Энергия, 1974 г., стр.5, 6.
Изобретение относится к оборонной технике и в частности к средствам борьбы с малоразмерными целями и может быть использовано в системах управления ракетами, формирующими на борту команды управления движением. Технический результат - повышение помехоустойчивости при использовании широтно-импульсной модуляции сигналов управления в рулевом приводе. Предложен способ формирования команд управления ракетой, в котором выделяют сигналы наведения, задают команды управления рулевым приводом в виде релейного широтно-импульсного модулированного сигнала, вырабатывают импульсы, передний фронт которых формируют до момента возникновения импульсов э.д.с. самоиндукции в обмотках управления рулевым приводом, вызывающих помеху, задний фронт импульсов формируют после момента окончания помехи, вырабатываемыми импульсами запрещают прохождение помехи в команды управления ракетой, что позволило исключить влияние внутренних помех при формировании команд управления. Предложена ракета, содержащая приемник и последовательно соединенные аппаратуру разделения каналов и декодирования по курсу и тангажу, преобразователь команд и одноканальный рулевой привод, в которую введены первый и второй формирователи импульсов и схема запрета и ракета, содержащая дополнительно к изложенной выше второй канал рулевого привода, идентичный первому, третий и четвертый формирователи импульсов, что исключило влияние внутренних помех, создаваемых рулевым приводом, при этом повышено быстродействие рулевого привода за счет допустимости увеличения э.д.с.самоиндукции на обмотках рулевого привода, вызывающей соответственно увеличение амплитуды ложных импульсов. 2 н. и 1 з.п. ф-лы, 3 ил.
| Основы радиоуправления | |||
| / Под ред | |||
| В.А | |||
| Вейцеля | |||
| - М.: Советское радио, 1973, с.246-248 | |||
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ С АЭРОДИНАМИЧЕСКИМИ РУЛЯМИ | 2000 |
|
RU2182306C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 1998 |
|
RU2148780C1 |
| СПОСОБ ПРОВЕДЕНИЯ СОСТЯЗАНИЯ ВОДИТЕЛЕЙ ТРАНСПОРТНЫХ СРЕДСТВ И ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2261133C1 |
| US 4542870 А, 24.09.1985. | |||

