Область техники, к которой относится изобретение
Изобретение относится к области способов и средств для предотвращения столкновений автомобилей, в частности, к способу оценки возможности столкновения и информирования водителя об угрозе столкновения при перестроении.
Уровень техники
Известно выбранное в качестве прототипа решение, описывающее систему поддержки рулевого управления (RU 2685108, опубл. 04.06.2018), которая содержит: блок контроля периферии, блок распознавания полосы, блок поддержки управления при смене полосы, блок определения состояния выполнения смены полосы, блок остановки поддержки смены полосы движения, выполненный с возможностью остановки поддержки управления при смене полосы, когда блок контроля периферии определяет приближающееся транспортное средство, блок поддержки управления возвратом по центру, выполненный с возможностью выполнения поддержки управления возвратом по центру, когда поддержка управления при смене полосы остановлена в первой части смены полосы, блок поддержки управления предотвращением столкновения, выполненный с возможностью выполнения поддержки управления предотвращением столкновения, когда поддержка управления при смене полосы движения остановлена во второй части смены полосы. Обеспечивается поддержка рулевого управления при смене полосы для повышения безопасности и удобства.
В данном решении велика зависимость работы системы от определения полосы движения автомобиля, что повышает вероятность столкновения при отсутствии разметки или неверном определении полосы движения автомобиля.
Раскрытие изобретения
В одном аспекте изобретения раскрыт способ предупреждения о столкновении, содержащий этапы на которых:
- детектируют наличие препятствия сбоку от автомобиля с помощью датчиков обнаружения препятствий;
- контролируют поворот руля автомобиля с помощью датчика поворота руля;
- подают сигнал предупреждения с помощью средства предупреждающей сигнализации при выполнении по меньшей мере следующих условий: при обнаружении поворота руля на величину большую предварительно заданного порога и при наличии препятствия сбоку от автомобиля.
В дополнительных аспектах раскрыто, что сигнал предупреждения представляет собой по меньшей мере одно из вибрационного сигнала, подаваемого на руль автомобиля, светового сигнала, звукового сигнала; по меньшей мере одно из амплитуды и частоты сигнала предупреждения зависит от времени до момента потенциального столкновения, причем чем короче время до момента потенциального столкновения, тем больше по меньшей мере одно из амплитуды или частоты сигнала предупреждения; подают сигнал предупреждения только при включенном сигнале поворота; в качестве датчика обнаружения препятствий используют по меньшей мере одно из ультразвукового датчика, видеокамеры; предварительно заданный порог поворота руля изменяют в зависимости от скорости движения автомобиля, причем чем выше скорость, тем ниже устанавливают предварительно заданный порог поворота руля; предварительно заданный порог поворота руля изменяют в зависимости от по меньшей мере одного из относительных скоростей автомобиля и препятствия, относительных ускорений автомобиля и препятствия, детектируют наличие препятствия в слепой зоне с помощью датчиков обнаружения препятствий.
Основной задачей, решаемой заявленным изобретением, является оценка возможности столкновения, исходя из дорожной ситуации и действий водителя, и также предупреждение водителя об угрозе столкновения при маневре.
Сущность изобретения заключается в том, что датчики автомобиля отслеживают наличие препятствий по бокам автомобиля и в случае обнаружения начала маневра, при условии наличия потенциально опасных препятствий, с которыми может произойти столкновение, в стороне совершаемого маневра, водителю выдается предупреждающий сигнал.
Технический результат, достигаемый решением, заключается в повышении безопасности маневров автомобиля на дороге.
Краткое описание чертежей.
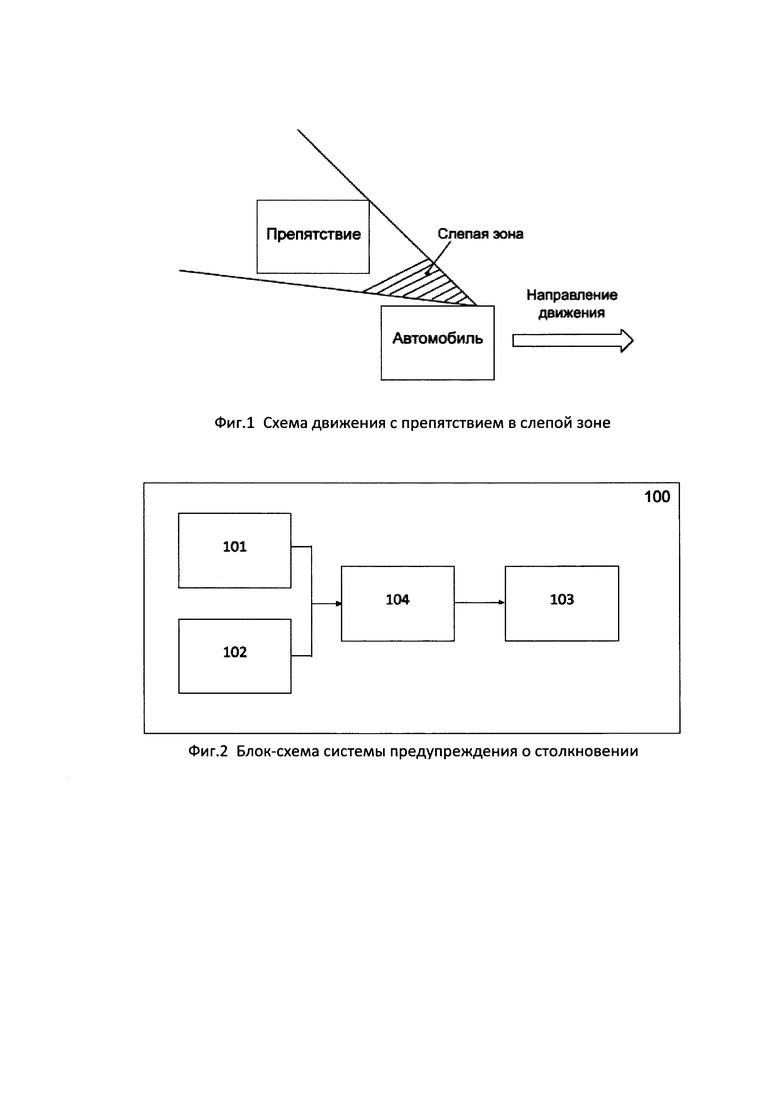
Фиг. 1. Схема движения с препятствием в слепой зоне
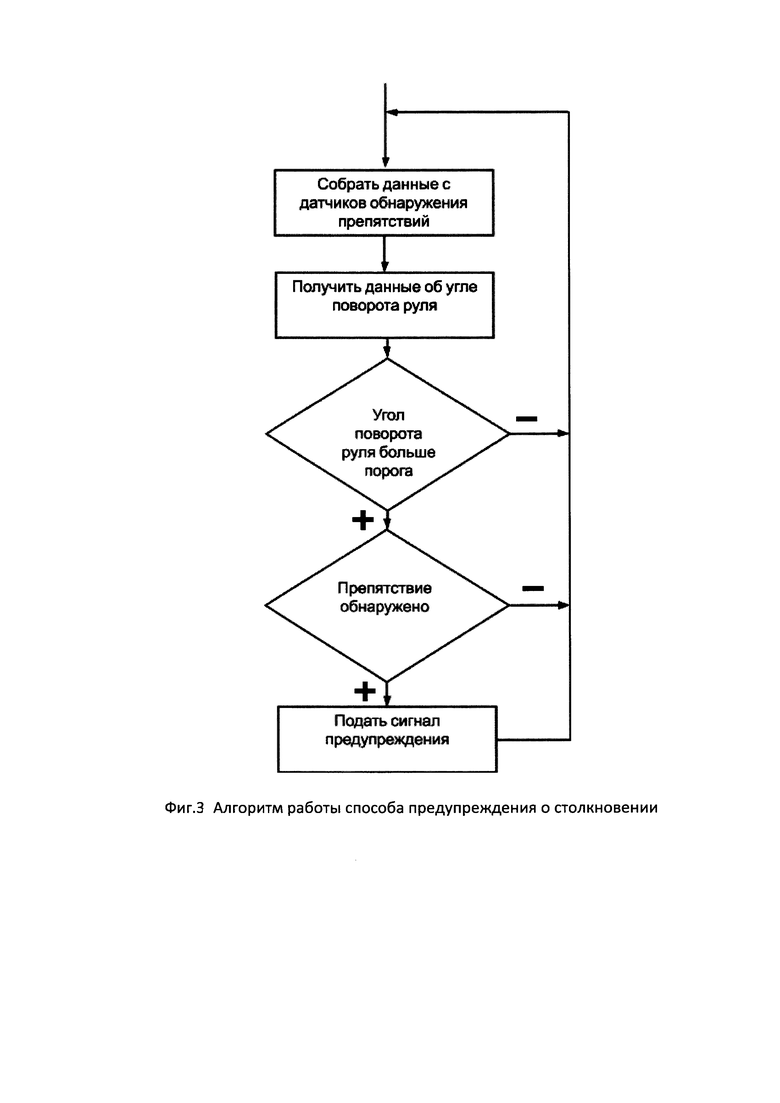
Фиг. 2. Блок-схема системы предупреждения о столкновении
Фиг. 3. Алгоритм работы способа предупреждения о столкновении
Осуществление изобретения.
Нижеследующее подробное описание и прилагаемые чертежи показывают различные примерные варианты осуществления изобретения. Описание и чертежи носят поясняющий, но не ограничивающий характер, на основании материалов заявки специалист в данной области техники сможет реализовать множество вариантов изобретения, входящих в объем изобретения, определяемый формулой изобретения. Этапы описанных способов являются примерными, и порядок этапов не является необходимым или критическим.
На фиг. 1 показана схема, отображающая типичную дорожную ситуацию, на которой автомобиль движется в указанном на схеме направлении, а сбоку от него в том же направлении движется препятствие (другой автомобиль). Водитель видит дорожную обстановку сбоку от автомобиля боковым зрением и в боковое зеркало заднего вида, но существует зона, в которой он не видит препятствий ни в зеркало, ни боковым зрением. Если автомобиль начнет маневр в сторону препятствия, находящегося в слепой зоне, может случиться столкновение автомобиля с препятствием.
Для предотвращения таких ситуаций разработчиками предлагается способ предупреждения о столкновении и соответствующая система, реализующая его. Предлагаемая система предупреждения о столкновении (показана на фиг. 2) устанавливается в автомобиле 100 и состоит из датчиков 101 обнаружения препятствий, датчика 102 поворота руля, средства 103 предупреждающей сигнализации, блока 104 управления, который принимает сигналы от датчиков, обрабатывает их и при необходимости командует средству 103 предупреждающей сигнализации выдать сигнал предупреждения. Все блоки и датчики на фиг. 2 функционально связаны друг с другом так, как показано на фиг. 2.
Система предупреждения о столкновении в базовом варианте работает следующим образом (показан на фиг. 3): собирают с помощью блока управления данные с датчиков обнаружения препятствий и данные об угле поворота руля, проверяют больше ли угол поворота руля порогового значения, проверяют, обнаружено ли препятствие, далее если руль повернут на угол больший порогового значения и препятствие обнаружено, выдают сигнал для водителя о том, что маневр может привести к столкновению с препятствием.
В качестве датчиков обнаружения препятствий могут служить как ультразвуковые или радиочастотные датчики, которые используются для измерения расстояния до препятствия с помощью отраженного сигнала, так и видеокамеры, которые используются либо только для фиксации наличия препятствия, предпочтительно, в слепой зоне, либо дополнительно для оценки или вычисления расстояние до препятствия. Способы для реализации этой функциональности хорошо известны в уровне техники и не являются предметом настоящего изобретения. Эти же датчики могут служить для измерения или оценки относительной скорости препятствия по сравнению с автомобилем.
Ультразвуковые датчики предпочтительно расположены в задней части автомобиля, наиболее предпочтительно в заднем бампере, видеокамеры предпочтительно расположены в передней части автомобиля и направлены в сторону задней части автомобиля, наиболее предпочтительно в боковых зеркалах заднего вида. Угол обзора видеокамер может быть выбран таким, чтобы наилучшим образом удовлетворять целям эффективной обработки их сигнала блоком управления.
Датчики могут контролировать только слепую зону, а могут контролировать и больший диапазон, что обеспечивается подбором и настройкой датчиков. Так можно выбирать видеокамеры с углом обзора соответствующим слепой зоне. Больший диапазон контроля обеспечивает большую безопасность, но может приводить к частым срабатываниям и частым ложным срабатываниям системы предупреждения о столкновении.
Блок управления может быть как штатным электронным блоком управления автомобиля, так и дополнительным блоком управления, аппаратно представляющем собой процессор, микропроцессор, контроллер, микроконтроллер, специализированную электронную схему или иное аппаратное средство имеющее функциональность достаточную для приема, обработки и передачи сигналов, используемых в данном решении. Специалист в данной области техники без приложения творческих усилий сможет подобрать подходящий аппаратный блок для реализации заявленной функциональности.
Датчики могут передавать свой сигнал на блок управления как беспроводным образом, так и по проводам.
Датчик поворота руля может быть как штатным, так и дополнительно встроенным. Может быть использован любой известный датчик, например, потенциометрический, оптический, магниторезистивный, а также любой подходящий датчик, который будет разработан в будущем.
Блок управления принимает сигналы от всех датчиков и согласно заложенному в нему алгоритму, показанному на фиг. 3, делает вывод о возможности столкновения в результате совершаемого маневра в текущей дорожной ситуации, а далее направляет управляющий сигнал на средство предупреждающей сигнализации, которое информирует водителя об опасности совершаемого маневра.
Средство предупреждающей сигнализации может представлять собой световой индикатор (светодиод, массив светодиодов, световой знак, световое табло и т.п.), звуковой индикатор (динамик, бипер и т.п.), вибрационный сигнализатор. Как правило, средство предупреждающей сигнализации монтируется в автомобиль дополнительно, но могут использоваться и штатные средства аналогичной сигнализации.
Световой индикатор устанавливается в поле прямого или бокового зрения водителя. Звуковой индикатор устанавливается в непосредственной близости от водителя так, чтобы он легко распознавал его сигнал. Вибрационный сигнализатор предпочтительно устанавливается в руль автомобиля.
Предпочтительно использование вибрационного сигнализатора, так как его сигнал не может быть пропущен водителем из-за неблагоприятных внешних факторов, например громкой музыки или иных заглушающих звуков, яркого солнца, приводящего к уменьшению чувствительности глаз и т.п. Вибрацию руля водитель почувствует во время совершения маневра, так как его руки в этот момент будут на руле, а сам сигнал является специфическим и его сложно перепутать с чем-то или не заметить, что дополнительно повышает безопасность маневров автомобиля на дороге.
В одном из вариантов осуществления предварительно заданный порог угла поворота руля установлен фиксировано, например, 15 градусов. Это пороговое значение обеспечивает должную защиту от ложных срабатываний при выдаче предупреждений об опасности столкновения, когда небольшой поворот руля вызывает появление предупреждающей сигнализации, даже когда вероятность столкновения с препятствием мала. Эта ситуация может возникнуть при небольшом смещении автомобиля в целях объезда изъяна на дорожном полотне или выравнивания траектории движения автомобиля по полосе движения.
В другом варианте осуществления предварительно заданный порог зависит от времени потенциального столкновения с препятствием. Для этого измеряется:
- относительная скорость движения препятствия, которая может быть вычислена посредством обработки сигналов с датчиков обнаружения препятствия, как видеокамер, так и с радиочастотных или ультразвуковых датчиков, например, посредством измерения доплеровского сдвига частоты,
- скорость автомобиля, для чего используются стандартные средства, имеющиеся в любом современном автомобиле,
- расстояние до препятствия в направлении перпендикулярном направлению движения автомобиля до маневра (в самом начале маневра),
- угол поворота руля автомобиля, который через линейный коэффициент связан с углом поворота передних колес.
Отношение расстояния до препятствия к произведению угла поворота передних колес автомобиля на скорость автомобиля позволяет определить время до потенциального столкновения с препятствием. В одном из вариантов осуществления сигнализация о возможном столкновении включается, только когда вычисленное блоком управления время до потенциального столкновения становится меньше порогового времени, например, 10 секунд. То есть если водитель совершает потенциально опасный маневр, но либо скорость автомобиля мала, либо угол поворота руля мал, либо обе величины малы, и поэтому момент столкновения отдален во времени, то сигнал предупреждения не подается до тех пор, пока время до столкновения не станет малым. В этом варианте осуществления уменьшается частота ложных срабатываний сигнала предупреждения, так как водитель может совершать маневр будучи осведомленным о наличии препятствия, например, он объезжает изъян дорожного полотна или смещается в сторону препятствия в силу иных причин.
В более усовершенствованном варианте осуществления блок управления, используя скорость движения автомобиля и препятствия и зная время до потенциального столкновения с препятствием, определяет возможность столкновения на основании относительного расположения автомобиля и препятствия в направлении движения автомобиля до совершения маневра. Блок управления на основании этих данных определяет относительное расположение автомобиля и препятствия в конце маневра, если относительное расположение автомобиля и препятствия превышает заранее заданный порог, например, 2 длины автомобиля, то сигнал предупреждения о столкновении не выдается.
В еще одном варианте осуществления блок управления получает информацию о скорости движения автомобиля и выдает сигнал предупреждения только в случае превышения скорости заранее заданного порога, например, 20 км/ч, чтобы не вызывать слишком частых срабатываний предупреждения о столкновении. Что может иметь место в пробке или на светофоре, когда сбоку от автомобиля, в частности, в слепой зоне точно есть препятствие, но водитель, как правило, осведомлен о нем.
Вариант 1 осуществления.
В одном из вариантов осуществления при определении потенциального столкновения согласно описанным выше способам блок управления командует средству предупреждающей сигнализации выдавать сигнал предупреждения амплитудой и/или частотой зависящим от времени столкновения, например, если время столкновения превышает первый порог, например, 20 секунд, предупреждение не выдается, если находится между вторым и первым порогом, например 15-20 секунд, то выдается сигнал первой амплитуды, если находится между третьим и вторым порогом, например 10-15 секунд, то выдается сигнал второй более высокой амплитуды, если меньше третьего порога, например менее 10 секунд, то выдается сигнал третьей еще более высокой амплитуды. Аналогичный подход может быть использован при задании частоты сигнала предупреждения, которая увеличивается при уменьшении времени до потенциального столкновения. Такое решение повышает информативность сигнала предупреждения для водителя, потому что он сразу понимает степень опасности столкновения, почувствовав сигнал.
Вариант 2 осуществления.
В одном из вариантов осуществления время до столкновения не определяют, но предварительно заданный порог поворота руля изменяют в зависимости от скорости движения автомобиля. При низкой скорости движения автомобиля порог устанавливается более высоким, то есть относительно большой поворот руля не вызывает появление сигнала предупреждения о столкновении, а при высокой скорости движения относительно небольшой поворот руля вызывает появление сигнала предупреждения о столкновении. Величина порога для разных диапазонов скоростей устанавливается такой, чтобы с одной стороны не вызывать беспокоящих частых срабатываний, с другой стороны - чтобы не пропускать потенциальные опасности. Предварительно установленные параметры могут быть скорректированы водителем автомобиля для чего в одном из вариантов осуществления предусмотрена соответствующая функциональность. В этом варианте обеспечивается еще более высокая безопасность маневров, так как маневры на более высокой скорости потенциально более опасны в силу уменьшения времени на реагирование водителем.
В одном из вариантов возможно реализовать самообучение системы предупреждения о столкновении на основании анализа того изменил ли водитель угол поворота руля или скорость автомобиля после выдачи сигнала предупреждения или предусмотрев для водителя возможность отключения некорректно сработавшего сигнала и анализируя моменты и ситуации, когда это отключение произошло. На основании этих данных может быть изменен по меньшей мере предварительно заданный порог поворота руля.
Вариант 3 осуществления.
Этот вариант основан на варианте 1 осуществления, но в нем кроме мгновенных скоростей автомобиля и препятствия определяются и ускорения по меньшей мере одного из автомобиля и препятствия. Определенные ускорения используются для корректировки времени потенциального столкновения. Дальнейшая работа способа предупреждения и соответствующей системы аналогичны варианту 1 осуществления. Ускорение автомобиля легко определяется по данным его бортового компьютера, также предлагаемая система может быть оснащена блоком определения координат и блок управления может определять скорость и ускорение автомобиля на основании данных блока определения координат. Ускорение препятствия может быть определено на основании постоянно получаемых данных о его скорости.
Варианты осуществления не ограничиваются описанными здесь вариантами осуществления, специалисту в области техники на основе информации изложенной в описании и знаний уровня техники станут очевидны и другие варианты осуществления изобретения, не выходящие за пределы сущности и объема данного изобретения.
Элементы, упомянутые в единственном числе, не исключают множественности элементов, если отдельно не указано иное.
Под функциональной связью элементов следует понимать связь, обеспечивающую корректное взаимодействие этих элементов друг с другом и реализацию той или иной функциональности элементов. Частными примерами функциональной связи может быть связь с возможностью обмена информацией, связь с возможностью передачи электрического тока, связь с возможностью передачи механического движения, связь с возможностью передачи света, звука, электро-магнитных или механических колебаний и т.д. Конкретный вид функциональной связи определяется характером взаимодействия упомянутых элементов, и, если не указано иное, обеспечивается широко известными средствами, используя широко известные в технике принципы.
Способы, раскрытые здесь, содержат один или несколько этапов или действий для достижения описанного способа. Этапы и/или действия способа могут заменять друг друга, не выходя за пределы объема формулы изобретения. Другими словами, если не определен конкретный порядок этапов или действий, порядок и/или использование конкретных этапов и/или действий может изменяться, не выходя за пределы объема формулы изобретения.
В заявке не указано конкретное программное и аппаратное обеспечение для реализации блоков на чертежах, но специалисту в области техники должно быть понятно, что сущность изобретения не ограничена конкретной программной или аппаратной реализацией, и поэтому для осуществления изобретения могут быть использованы любые программные и аппаратные средства известные в уровне техники. Так аппаратные средства могут быть реализованы в одной или нескольких специализированных интегральных схемах, цифровых сигнальных процессорах, устройствах цифровой обработки сигналов, программируемых логических устройствах, программируемых пользователем вентильных матрицах, процессорах, контроллерах, микроконтроллерах, микропроцессорах, электронных устройствах, других электронных модулях, выполненных с возможностью осуществлять описанные в данном документе функции, компьютер либо комбинации вышеозначенного.
Хотя отдельно не упомянуто, но очевидно, что, когда речь идет о хранении данных, программ и т.п., подразумевается наличие машиночитаемого носителя данных, примеры машиночитаемых носителей данных включают в себя постоянное запоминающее устройство, оперативное запоминающее устройство, регистр, кэш-память, полупроводниковые запоминающие устройства, магнитные носители, такие как внутренние жесткие диски и съемные диски, магнитооптические носители и оптические носители, такие как диски CD-ROM и цифровые универсальные диски (DVD), а также любые другие известные в уровне техники носители данных.
Несмотря на то, что примерные варианты осуществления были подробно описаны и показаны на сопроводительных чертежах, следует понимать, что такие варианты осуществления являются лишь иллюстративными и не предназначены ограничивать более широкое изобретение, и что данное изобретение не должно ограничиваться конкретными показанными и описанными компоновками и конструкциями, поскольку различные другие модификации могут быть очевидны специалистам в соответствующей области.
Признаки, упомянутые в различных зависимых пунктах формулы, а также реализации раскрытые в различных частях описания могут быть скомбинированы с достижением полезных эффектов, даже если возможность такого комбинирования не раскрыта явно.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство предупреждения дорожно-транспортных происшествий при перестроении на автомобильных дорогах | 2023 |
|
RU2805577C1 |
| СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ | 2022 |
|
RU2793009C1 |
| БЕСПИЛОТНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ЕГО ДВИЖЕНИЕМ | 2022 |
|
RU2809334C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ОБЪЕКТОВ | 2022 |
|
RU2814813C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕКТОВ | 2022 |
|
RU2806452C1 |
| СИСТЕМА ПОДДЕРЖКИ РУЛЕВОГО УПРАВЛЕНИЯ | 2018 |
|
RU2685108C1 |
| Адаптивная помощь при управлении транспортным средством | 2018 |
|
RU2710150C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С СИСТЕМОЙ ИДЕНТИФИКАЦИИ | 2009 |
|
RU2531115C2 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ УЧАСТНИКОВ ДОРОЖНОГО ДВИЖЕНИЯ | 2015 |
|
RU2598362C1 |
| СПОСОБ ОПОВЕЩЕНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2668350C9 |
Изобретение относится способу предупреждения о столкновении транспортного средства. Способ предупреждения о столкновении содержит этапы, на которых детектируют наличие препятствия в слепой зоне сбоку от автомобиля с помощью датчиков обнаружения препятствий, контролируют поворот руля автомобиля с помощью датчика поворота руля и подают сигнал предупреждения. Сигнал подают с помощью средства предупреждающей сигнализации при выполнении следующих условий: при обнаружении поворота руля на величину, большую предварительно заданного порога, и при наличии препятствия в слепой зоне сбоку от автомобиля. Достигается повышение безопасности управления транспортным средством. 7 з.п. ф-лы, 3 ил.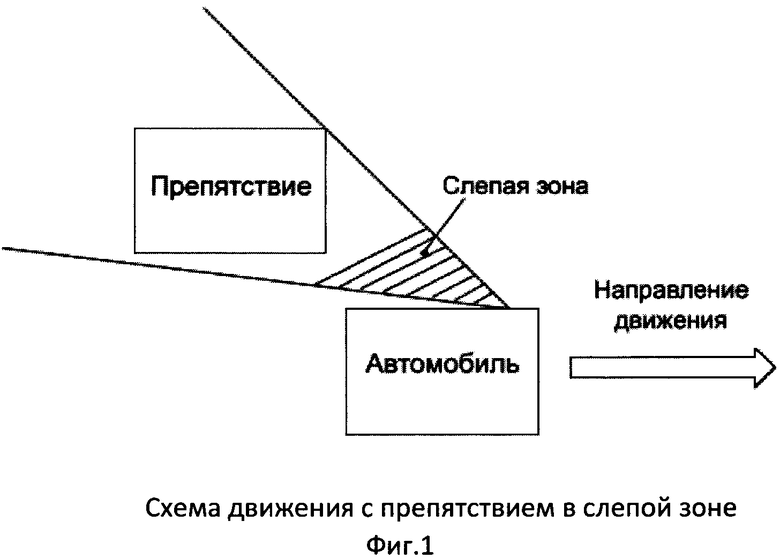
1. Способ предупреждения о столкновении, содержащий этапы на которых:
- детектируют наличие препятствия в слепой зоне сбоку от автомобиля с помощью датчиков обнаружения препятствий;
- контролируют поворот руля автомобиля с помощью датчика поворота руля;
- подают сигнал предупреждения с помощью средства предупреждающей сигнализации при выполнении по меньшей мере следующих условий: при обнаружении поворота руля на величину, большую предварительно заданного порога, и при наличии препятствия в слепой зоне сбоку от автомобиля.
2. Способ по п. 1, в котором сигнал предупреждения представляет собой вибрационный сигнал, подаваемый на руль автомобиля.
3. Способ по п. 2, в котором по меньшей мере одно из амплитуды и частоты сигнала предупреждения зависит от времени до момента потенциального столкновения, причем чем короче время до момента потенциального столкновения, тем больше по меньшей мере одно из амплитуды или частоты сигнала предупреждения.
4. Способ по п. 1, в котором подают сигнал предупреждения только при условии включенного сигнала поворота.
5. Способ по п. 1, в котором в качестве датчика обнаружения препятствий используют ультразвуковой датчик.
6. Способ по п. 1, в котором предварительно заданный порог поворота руля изменяют в зависимости от скорости движения автомобиля, причем чем выше скорость, тем ниже устанавливают предварительно заданный порог поворота руля.
7. Способ по п. 1, в котором предварительно заданный порог поворота руля изменяют в зависимости от относительных ускорений автомобиля и препятствия.
8. Способ по п. 1, в котором детектируют наличие препятствия в слепой зоне с помощью датчиков обнаружения препятствий.
| СИСТЕМА ПОДДЕРЖКИ РУЛЕВОГО УПРАВЛЕНИЯ | 2018 |
|
RU2685108C1 |
| ЭЛЕКТРИЧЕСКИЙ ВЕЛОСИПЕД | 2015 |
|
RU2688405C2 |
| US 8886450 B2, 11.11.2014. | |||

