Изобретение относится к техническим средствам освоения океана, а именно к подводным аппаратам, предназначенным для выполнения поисковых работ и осмотровых работ на дне.
Известен подводный аппарат, содержащий корпус, движители вертикального и горизонтального хода, кабель и телекамеру (а.с. N 1334579, кл. B 63 B 21/00, 1987).
Недостатком этого подводного аппарата является то, что для выполнения поиска затонувших объектов на дне требуется высокоскоростное обследование обширных, горизонтальных плоскостей, при котором необходимо для предотвращения столкновений с препятствиями в вертикальной плоскости поворачивать телекамеру дополнительным приводом. Постановка такого привода на малогабаритный аппарат приводит к увеличению массы, ухудшению его гидродинамических характеристик и снижению быстродействия под водой.
Известен подводный аппарат, содержащий корпус, движители вертикального и горизонтального хода, кабель и телекамеру. Указанный подводный аппарат является наиболее близким по своей технической сущности к предлагаемому аппарату.
Недостатком прототипа является то, что с его помощью не удается выполнить поисковые и осмотровые работы на больших горизонтальных плоскостях дна с высоким быстродействием. Это объясняется тем, что угол обзора подводной телекамеры имеет ограничение до 40о, а корпус телекамеры закреплен жестко на корпусе аппарата. Таким образом, в устройстве-прототипе ограничена возможность проведения осмотровых работ. Кроме того, ограничение угла обзора телекамеры не позволяет увеличить скорость движения аппарата в воде, поскольку это затрудняет оператору восприятие видеоинформации.
Цель изобретения повышение быстродействия подводного аппарата и расширение его функциональных возможностей.
Указанная цель достигается тем, что в подводном аппарате, содержащем корпус, на котором закреплен один конец кабеля, и установленные на корпусе телекамеру, а также движители вертикального и горизонтального хода, корпус выполнен по форме эллипсоида вращения, большая ось которого совпадает с продольной осью аппарата. Оптическая ось телекамеры расположена в диаметральной плоскости аппарата и составляет с большой осью эллипсоида вращения угол, равный половине угла обзора телекамеры. Линия метацентрической высоты аппарата составляет с большой осью эллипсоида угол, равный углу обзора телекамеры. Оси движителей горизонтального хода расположены в плоскости, проходящей через центр масс аппарата, и параллельны большей оси эллипсоида вращения. Оси движителей вертикального хода расположены в плоскости, проходящей через центр величины аппарата, и перпендикулярны большей оси эллипсоида вращения. Конец кабеля закреплен в верхней части аппарата в точке, расположенной в секторе, образованном линией метацентрической высоты и большей осью эллипсоида вращения.
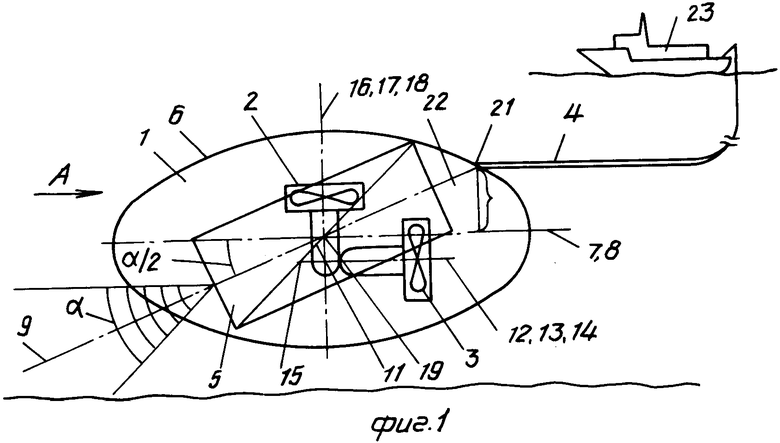
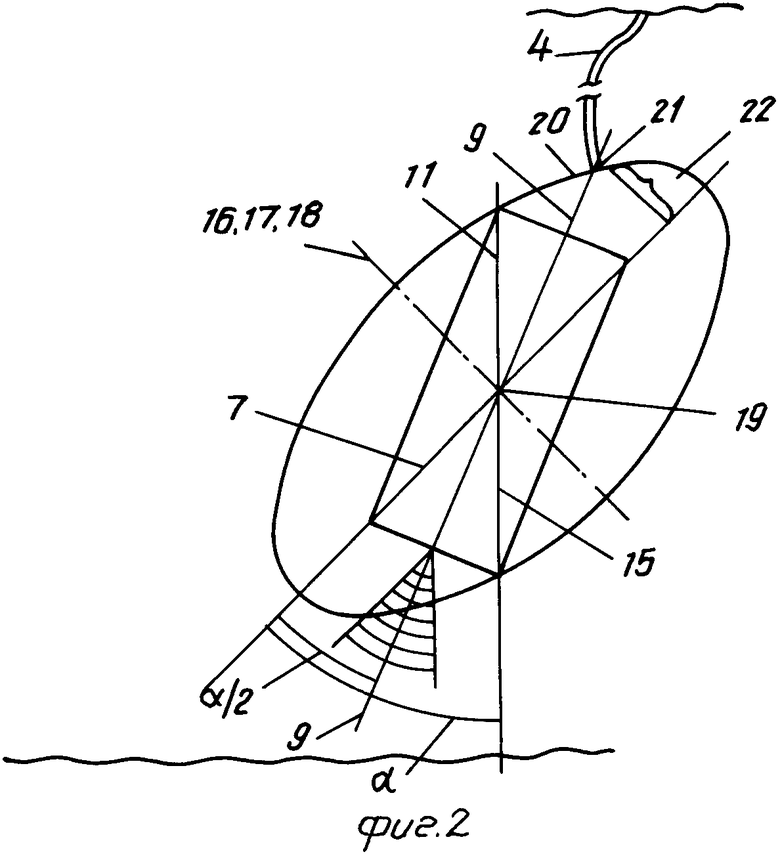
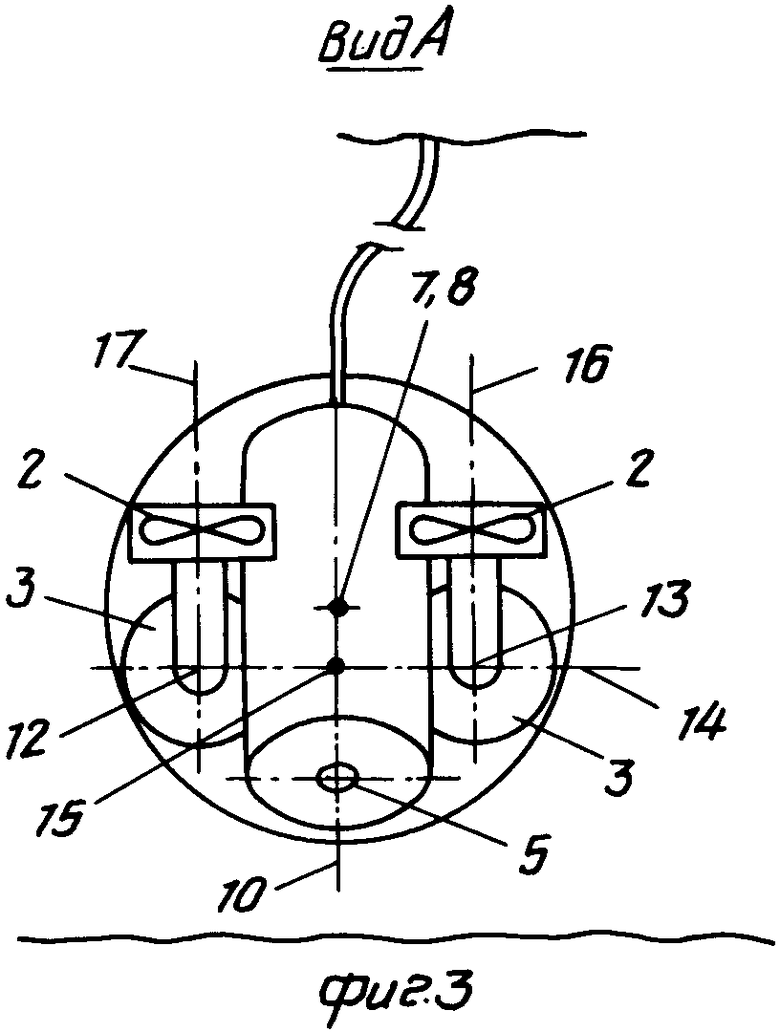
На фиг. 1 изображен подводный аппарат, вид сбоку, разрез, при движении вперед; на фиг. 2 то же, при остановке и осмотре дна; на фиг. 3 вид А на фиг. 1.
Подводный аппарат содержит корпус 1, движители вертикального 2 и горизонтального 3 хода, кабель 4 и телекамеру 5.
Корпус 1 выполнен в виде тела, описываемого эллипсоидом 6 вращения, большая ось 7 которого совпадает с продольной осью 8 аппарата. Оптическая ось 9 телекамеры 5 находится в диаметральной плоскости 10 аппарата и составляет с большей осью 7 эллипсоида угол, равный половине угла обзора телекамеры. Линия 11 метацентрической высоты составляет с большей осью 7 эллипсоида угол, равный углу обзора телекамеры. Оси 12 и 13 движителей 3 горизонтального хода лежат в плоскости 14, проходящей через центр 15 масс аппарата, и параллельны большей оси 7 эллипсоида. Оси 16 и 17 движителей 2 вертикального хода находятся в плоскости 18, проходящей через центр 19 величины аппарата и перпендикулярной большей оси эллипсоида. Кабель 4 закреплен в кормовой части 20 аппарата таким образом, что точка 21 закрепления находится в секторе 22, образованном линией 11 метацентрической высоты и большей осью 7 эллипсоида. Подводный аппарат доставляют в район проведения поиска на судне 23.
Устройство работает следующим образом.
Корпус 1 подводного аппарата опускают с судна 23 на глубину на кабеле 4. Поскольку линия 11 метацентрической высоты составляет с большей осью угол, равный углу обзора телекамеры, а оптическая ось телекамеры является биссектрисой этого угла α, то при выключенных движителях удается осматривать дно непосредственно под аппаратом, а при включенных движителях хода осматривать дно по курсу движения аппарата на значительном удалении от него, что позволяет предупредить столкновение с препятствиями. Закрепление кабеля в секторе 22, образованном линией метацентрической высоты 11 и большей осью 7 эллипсоида 6, в кормовой части 20 корпуса 1 при движении аппарата создается гидродинамическое сопротивление R, пропорциональное квадрату скорости его движения в вязкой среде (воде). Эта сила создает дифференциpующий момент на корму 20 относительно центра 19 величины аппарата. Этим обеспечивается подъем оптической оси 9 телекамеры 5 к плоскости горизонта и, соответственно, увеличение дальности обзора. Указанный эффект тем больше, чем выше скорость движения аппарата. В результате при высоких скоростях перемещения аппарата удается осматривать большие площадки дна до подводного горизонта, а также выявлять препятствия по пути движения аппарата, а на малой скорости детально уточнять особенности исследуемых объектов на дне в непосредственной близости под корпусом аппарата.
Таким образом, предложенным решением удается существенно повысить быстродействие аппарата при проведении осмотровых работ на дне, предохранить его от столкновений с препятствиями и значительно расширить функциональные возможности при поиске затонувших объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подводный поисковый аппарат | 2023 |
|
RU2805898C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ АППАРАТОМ | 2000 |
|
RU2176967C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТЕЛЕКАМЕРОЙ | 2001 |
|
RU2200971C2 |
| Устройство для осуществления глубоководного контроля за подводной средой и подводно-техническими работами | 2019 |
|
RU2728888C1 |
| ПОДВОДНАЯ ПЛАТФОРМА | 2000 |
|
RU2182212C2 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2004 |
|
RU2276647C1 |
| МАЛОГАБАРИТНЫЙ ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2387570C1 |
| ПОДВОДНОЕ СУДНО ДЛЯ ОБСЛУЖИВАНИЯ ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ НА АРКТИЧЕСКОМ ШЕЛЬФЕ И ДРУГИХ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2016 |
|
RU2629625C1 |
| НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 1997 |
|
RU2104210C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2003 |
|
RU2248300C1 |
Использование: при проведении подводных поисковых и осмотровых работ. Сущность изобретения: подводный поисковый аппарат содержит выполненный в форме эллипсоида вращения корпус с установленными на нем движителями горизонтального и вертикального хода, а также расположенную в корпусе телекамеру. Оптическая ось телекамеры расположена в диаметральной плоскости аппарата и образует с большой осью эллипсоида угол, равный половине угла ее обзора. Линия метацентрической высоты образует с большой осью угол, равный углу обзора телекамеры. Оси движителей горизонтального хода расположены в плоскости, проходящей через центр масс аппарата, и параллельны большей оси эллипсоида. Оси движителей вертикального хода расположены в плоскости, проходящей через центр величины аппарата, и перпендикулярны большей оси эллипсоида. 3 ил.
| Сытин А.В | |||
| Необитаемые подводные аппараты | |||
| М.: МО СССР, 1975, с | |||
| Двухколейная подвесная дорога | 1919 |
|
SU151A1 |
