Родственная заявка
Данная заявка испрашивает преимущество приоритета по предварительной заявке на патент США №62/850,572, поданной 21 мая 2019 года, содержание которой полностью включено в настоящий документ посредством ссылки.
Область техники, к которой относится настоящее изобретение
Настоящее изобретение в некоторых вариантах своего осуществления относится к выравниванию датчиков, в частности, помимо прочего, к системам и способам выравнивания датчиков на груди целевого пациента.
Предшествующий уровень техники настоящего изобретения
Выравнивание датчиков может влиять на точность измерений тканей-мишеней в теле конкретного человека, например, в измерительных системах, основанных на передаче энергии между двумя датчиками, располагающихся на разных частях тела, которая проходит через ткань-мишень, или использующих одинарный датчик (например, приемник, передатчик и/или приемопередатчик, который принимает отражения своего собственного сигнала). Выравнивание датчиков для обеспечения точности измерений часто сопровождается неточностями при размещении датчиков.
Краткое раскрытие настоящего изобретения
Согласно первому аспекту настоящего изобретения предложено устройство для установки в требуемое положение, по меньшей мере, одного датчика из числа переднего датчика и заднего датчика в требуемой области на грудной клетке конкретного человека, включающее в себя: задний установочный элемент, содержащий: (i) воротник, форма и размеры которого соответствуют линии плеч и основанию задней части шеи целевого пациента; и (ii) удлиненный элемент, который характеризуется наличием первого конца, соединенного с воротником, и второго конца с маркером местоположения, выполненного с возможностью обеспечения соответствия целевой анатомической особенности позвоночника целевого пациента; при этом удлиненный элемент во время его использования располагается параллельно длинной оси позвоночника на спине целевого пациента и над ней; а, по меньшей мере, один передний датчик и, по меньшей мере, один задний датчик располагаются на грудной клетке пациента относительно заднего установочного элемента для передачи сигналов в целевую область и/или считывания сигналов, поступающих из целевой области.
Согласно второму аспекту настоящего изобретения предложен способ установки в требуемое положение, по меньшей мере, одного переднего датчика и, по меньшей мере, одного заднего датчика в целевой области на груди целевого пациента, предусматривающий: обеспечение наличия устройства согласно одному из вариантов реализации первого аспекта; размещение воротника заднего установочного элемента на линии плеч и/или на основании шеи целевого пациента; размещение маркера местоположения удлиненного элемента заднего установочного элемента на заданном анатомическом ориентире позвоночника целевого пациента; размещение дугообразного сегмента удерживающего механизма поверх плеча целевого пациента таким образом, чтобы, по меньшей мере, один передний датчик и, по меньшей мере, один задний датчик, соединенные с удерживающим механизмом, были установлены на грудной клетке; и регулировку положения язычка, соединенного с удлиненным передним сегментом удерживающего механизма, в заданной анатомической области на груди.
В другом варианте реализации первого и второго аспектов настоящего изобретения, который дополнительно предусматривает использование удерживающего механизма, рассчитанного на соединение с задним установочным механизмом, указанный удерживающий механизм включает в себя: (i) по существу дугообразный сегмент, охватывающий плечо целевого пациента; (ii) удлиненный передний сегмент, соединяющийся, по меньшей мере, с передним датчиком, который контактирует с грудью целевого пациента; и (iii) удлиненный задний сегмент, соединяющийся, по меньшей мере, с одним задним датчиком, который контактирует со спиной целевого пациента; при этом во время работы задается местоположение удерживающего механизма относительно установленного в требуемое положение заднего установочного элемента, и с помощью удерживающего механизма на грудной клетке пациента размещается, по меньшей мере, один передний датчик и, по меньшей мере, один задний датчик для передачи сигналов в целевую область и/или считывания сигналов, поступающих из целевой области.
В еще одном варианте реализации первого и второго аспектов настоящего изобретения дополнительно предусмотрено использование энергонезависимой памяти, в которой хранится код, который при его исполнении, по меньшей мере, одним аппаратным процессором вычислительного устройства инициирует выполнение, по меньшей мере, одним аппаратным процессором следующих операций: управляемой активации, по меньшей мере, одного заднего датчика и, по меньшей мере, одного переднего датчика; приема выходных данных, по меньшей мере, с одного заднего датчика и, по меньшей мере, с одного переднего датчика; и вычисление приблизительного объема жидкости в целевой ткани конкретного пациента на основании выходных данных, по меньшей мере, одного заднего датчика и, по меньшей мере, одного переднего датчика.
В еще одном варианте реализации первого и второго аспектов настоящего изобретения задний установочный элемент имеет почти Y-образную форму; при этом воротник имеет такую форму, которая примерно соответствует форме коротких верхних плеч буквы Y, а удлиненный элемент заднего установочного элемента имеет такую форму, которая примерно соответствует форме длинного плеча буквы Y.
В еще одном варианте реализации первого и второго аспектов настоящего изобретения удерживающий механизм имеет форму буквы U, первое плечо которой короче второго плеча, при этом передний сегмент удерживающего механизма соответствует первому плечу буквы U, задний сегмент удерживающего механизма соответствует второму плечу, а дугообразный сегмент удерживающего механизма соответствует изогнутому участку буквы U.
В еще одном варианте реализации первого и второго аспектов настоящего изобретения задний установочный элемент дополнительно содержит регулировочный механизм, предназначенный для регулировки расстояния между удерживающим механизмом и удлиненным элементом заднего установочного элемента.
В еще одном варианте реализации первого и второго аспектов настоящего изобретения регулировочный механизм включает в себя множество селекторов стопового положения, распределенных по двухмерной схеме, причем каждый селектор стопового положения располагается в заданной точке удерживающего механизма для задания разного расстояния между удерживающим механизмом и удлиненным элементом заднего установочного элемента.
В еще одном варианте реализации первого и второго аспектов настоящего изобретения каждый из множества селекторов стопового положения соответствует комбинации, по меньшей мере, одних физических и/или анатомических параметров пациента.
В еще одном варианте реализации первого и второго аспектов настоящего изобретения регулировочный механизм регулирует положение удерживающего механизма в двухмерной плоскости по существу параллельно спине целевого пациента.
В еще одном варианте реализации первого и второго аспектов настоящего изобретения передний сегмент включает в себя, по меньшей мере, один язычок, установленный таким образом, что в работе, по меньшей мере, один язычок располагается у заданного анатомического ориентира целевого пациента; а, по меньшей мере, один передний датчик располагается относительно груди в положении, которое соответствует целевой области.
В еще одном варианте реализации первого и второго аспектов настоящего изобретения заданный анатомический ориентир выбирается из группы, включающей в себя: яремную ямку, ключицу и грудину.
В еще одном варианте реализации первого и второго аспектов настоящего изобретения удерживающий механизм и задний установочный элемент имеют такие размеры и форму и регулируются таким образом, чтобы обеспечить установку в требуемое положение, по меньшей мере, одного переднего датчика и, по меньшей мере, одного заднего датчика в целевой области, находящейся, по меньшей мере, в пределах одного из органов, выбранного из группы, включающей в себя: левое легкое, правое легкое, правую среднюю долю, правую верхнюю долю, правую нижнюю долю, левую верхнюю долю, левую нижнюю долю, сердце, трахею и сочетания указанных органов.
В еще одном варианте реализации первого и второго аспектов настоящего изобретения дополнительно предусмотрено использование, по меньшей мере, одного элемента позиционирования переднего датчика, соединенного, по меньшей мере, с одним передним датчиком с целью коррекции ориентации, по меньшей мере, одного переднего датчика, контактирующего с грудью целевого пациента, соответствующей целевой области, причем этот, по меньшей мере, один элемент позиционирования переднего датчика соединен с передним сегментом удерживающего механизма; и/или использование, по меньшей мере, одного элемента позиционирования заднего датчика, соединенного, по меньшей мере, с одним задним датчиком с целью коррекции ориентации, по меньшей мере, одного заднего датчика, контактирующего со спиной целевого пациента, соответствующей целевой области, причем этот, по меньшей мере, один элемент позиционирования заднего датчика соединен с задним сегментом удерживающего механизма.
В еще одном варианте реализации первого и второго аспектов настоящего изобретения удерживающий механизм включает в себя множество жестких сегментов, соединенных подпружиненными шарнирами, выполненными с возможностью коррекции расстояния между, по меньшей мере, одним передним датчиком и, по меньшей мере, одним задним датчиком, а также приложения усилия пружины для прижатия, по меньшей мере, одного переднего датчика и, по меньшей мере, одного заднего датчика к грудной клетке целевого пациента.
В еще одном варианте реализации первого и второго аспектов настоящего изобретения воротник имеет такие размеры и/или форму, чтобы он мог охватывать дугу около 40-60 градусов вокруг задней части шеи целевого пациента.
В еще одном варианте реализации первого и второго аспектов настоящего изобретения датчики выбираются из группы, включающей в себя: электромагнитные (ЕМ) передатчики и/или приемники, ультразвуковые передатчики и/или приемники, радиочастотные (RF) передатчики и/или приемники, элементы терапии, устройства для впрыскивания химических веществ и элементы формирования изображений.
В еще одном варианте реализации первого и второго аспектов настоящего изобретения удерживающий механизм выполнен из упругого материала, что позволяет увеличивать расстояние между, по меньшей мере, одним передним датчиком и, по меньшей мере, одним задним датчиком для охвата грудной клетки и прижатия, по меньшей мере, одного переднего датчика и, по меньшей мере, одного заднего датчика в направлении друг к другу, при этом во время работы удерживающий механизм прикладывает определенное усилие, по меньшей мере, к одному переднему датчику и, по меньшей мере, к одному заднему датчику, прижимая их к грудной клетке в положении, которое соответствует целевой области.
В еще одном варианте реализации первого и второго аспектов настоящего изобретения предложенное устройство регулируется таким образом, чтобы, по меньшей мере, один задний датчик располагался медиально в пределах около 2-9 сантиметров (см) относительно длинной оси позвоночника и в пределах около 8-30 см ниже верхнего конца позвоночного выступа целевого пациента.
В еще одном варианте реализации первого и второго аспектов настоящего изобретения датчики представляют собой ЕМ-датчики, причем около 30% эффективной зоны захвата и/или передачи ЕМ-датчиков находится в заданной целевой области.
В еще одном варианте реализации первого и второго аспектов настоящего изобретения дополнительно предусмотрено использование дополнительных датчиков для вычисления расстояния между передним датчиком и задним датчиком во время эксплуатации предложенного устройства.
В еще одном варианте реализации первого и второго аспектов настоящего изобретения дополнительно предусмотрена передача ЕМ-энергия между, по меньшей мере, одним передним датчиком и, по меньшей мере, одним задним датчиком на груди целевого пациента, которая проходит через целевую область этого пациента; измерение ЕМ-энергии, передаваемой через целевую область; и вычисление объема жидкости в целевой области.
В еще одном варианте реализации первого и второго аспектов настоящего изобретения дополнительно предусмотрен выбор одного из множества стоповых положений удерживающего механизма относительно удлиненного элемента заднего установочного элемента в соответствии с одним из множества стоповых положений, соответствующих комбинации, по меньшей мере, одних анатомических и/или физических размеров грудной клетки целевого пациента.
В еще одном варианте реализации первого и второго аспектов настоящего изобретения удерживающий механизм соединен с задним установочным элементом с помощью соединителя, который заходит в один из множества селекторов стопового положения.
Если не указано иное, то все технические и/или научные термины, используемые в настоящем документе, имеют значение, общепринятое среди специалистов в области техники, к которой относится настоящее изобретение. Ниже приведены некоторые примеры реализации способов и/или материалов, хотя на практике или при тестировании вариантов осуществления настоящего изобретения могут использоваться способы и/или материалы, аналогичные или эквивалентные тем, которые описаны в настоящем документе. В случае коллизии приоритет имеет описание изобретения к патенту, включая все определения. Кроме того, материалы, способы и примеры носят исключительно иллюстративный, а не обязательно ограничительный характер.
Реализация способа и/или системы согласно вариантам осуществления настоящего изобретения может предусматривать выполнение или приведение в исполнение выбранных задач в ручном, автоматическом или смешанном режиме. Более того, в зависимости от фактически используемых приборов и оборудования в вариантах осуществления способа и/или системы согласно настоящему изобретению несколько выбранных задач могут быть реализованы аппаратными средствами, программными средствами или аппаратно реализуемыми программными средствами или сочетанием указанных средств с использованием операционной системы.
Например, аппаратные средства для выполнения выбранных задач согласно вариантам осуществления настоящего изобретения могут быть реализованы в виде микросхемы или электрической схемы. Программные средства для выполнения выбранных задач согласно вариантам осуществления настоящего изобретения могут быть реализованы в виде множества программных команд, исполняемых компьютером с использованием любой подходящей операционной системы. В одном из примеров осуществления настоящего изобретения одна или несколько задач согласно вариантам осуществления способа и/или системы, описанных в настоящем документе, выполняются процессором обработки данных, таким как вычислительная платформа для исполнения множества команд. В необязательном варианте процессор обработки данных включает в себя энергозависимую память для хранения команд и/или данных и/или энергонезависимый носитель, например, магнитный жесткий диск и/или съемные носители, предназначенные для хранения команд и/или данных. В необязательном варианте также предусмотрено сетевое соединение. Кроме того, необязательно предусмотрен дисплей и/или устройство ввода данных пользователем, такое как клавиатура или мышь.
Краткое описание Фигур
Некоторые варианты осуществления заявленного изобретения, носящие исключительно иллюстративный характер, представлены в настоящем документе в привязке к прилагаемым чертежам. Если подробно рассматривать конкретные чертежи, то следует подчеркнуть, что показанные отличительные особенности представлены лишь для примера и исключительно с целью иллюстрации вариантов осуществления настоящего изобретения. Таким образом, описание, представленное в привязке к чертежам, знакомит специалистов в данной области техники с тем, как варианты осуществления заявленного изобретения могут быть реализованы на практике.
На фиг. 1 представлена блок-схема, иллюстрирующая устройство для установки в требуемое положение переднего и/или заднего датчика/датчиков на грудной клетке целевого пациента с целью передачи энергии в целевую область конкретного пациента и/или приема энергии из этой области согласно некоторым вариантам осуществления настоящего изобретения;
На фиг. 2 приведен один из примеров реализации устройства для установки в требуемое положение переднего датчика/датчиков и/или заднего датчика/датчиков на грудной клетке целевого пациента согласно некоторым вариантам осуществления настоящего изобретения;
На фиг. 3 схематически показан отдельный удерживающий механизм, не подсоединенный к заднему установочному элементу, согласно некоторым вариантам осуществления настоящего изобретения;
На фиг. 4 представлено схематическое изображение, иллюстрирующее вид сбоку предложенного устройства в нерабочем состоянии согласно некоторым вариантам осуществления настоящего изобретения;
На фиг. 5 представлено схематическое изображение устройства, где удерживающий механизм разведен на максимальное расстояние между передним датчиком и задним датчиком и/или находится в рабочем положении, согласно некоторым вариантам осуществления настоящего изобретения;
На фиг. 6 представлено схематическое изображение заднего установочного элемента согласно некоторым вариантам осуществления настоящего изобретения;
На фиг. 7 представлено схематическое изображение устройства, где удерживающий механизм подсоединен к заднему установочному элементу с помощью соединителя, согласно некоторым вариантам осуществления настоящего изобретения;
На фиг. 8 представлено схематическое изображение удерживающего механизма устройства, показанного отдельно от заднего установочного элемента, согласно некоторым вариантам осуществления настоящего изобретения;
На фиг. 9А-9С представлены схемы и/или изображения, иллюстрирующие один из примеров устройства позиционирования на целевом пациенте согласно некоторым вариантам осуществления настоящего изобретения;
На фиг. 10 представлена блок-схема, иллюстрирующая алгоритм реализации способа установки в требуемое положение переднего и/или заднего датчика/датчиков на грудной клетке и в целевой области конкретного пациента согласно некоторым вариантам осуществления настоящего изобретения;
На фиг. 11 представлено схематическое изображение, иллюстрирующее один из примеров реализации воротника, используемого для установки требуемой высоты в заднем установочном механизме, согласно некоторым вариантам осуществления настоящего изобретения; и
На фиг. 12 схематически показан вид крупным планом воротника, используемого для установки требуемой высоты в заднем установочном механизме, согласно некоторым вариантам осуществления настоящего изобретения.
Подробное раскрытие конкретных вариантов осуществления настоящего изобретения
Настоящее изобретение в некоторых вариантах своего осуществления относится к выравниванию датчиков, в частности, помимо прочего, к системам и способам выравнивания датчиков на груди целевого пациента.
Один из аспектов настоящего изобретения относится к устройству для установки в требуемое положение переднего и/или заднего датчика в целевой области грудной клетки конкретного человека, например, электромагнитных (ЕМ) приемопередатчиков для фиксации жидкости в легком пациента (или других примеров, описанных в настоящем документе). Предложенное устройство включает в себя элементы, выполненные с возможностью их размещения у соответствующего анатомического ориентира/ориентиров. Предложенное устройство регулируется таким образом, чтобы после размещения этих элементов у анатомического ориентира/ориентиров передние и/или задние датчики располагались соответствующим образом для зондирования целевой области грудной клетки. Предложенное устройство включает в себя задний установочный элемент, который содержит воротник, выполненный с возможностью его наложения на анатомическую область вдоль линии плеч/основания нижней части шеи; и удлиненный элемент с маркером местоположения в его нижней части (например, с риской), который выполнен с возможностью размещения на позвоночнике (например, на спине у определенного позвонка) целевого пациента, например, параллельно длинной оси позвоночника и/или над этой осью и/или поверх выбранной анатомической особенности позвоночника, такой как определенный позвонок. В необязательном варианте задается расстояние до заднего датчика от анатомической особенности позвоночника, находящейся ближе всего к указанному заднему датчику. После установки заднего установочного элемента в требуемое положение необязательный удерживающий механизм, соединенный с задним установочным элементом, оказывается в заданном месте, где задний и/или передний датчик, прикрепленный к удерживающему механизму, располагается на грудной клетке пациента в месте, которое соответствует целевой области. Удерживающий механизм может иметь по существу U-образную форму и необязательно включать в себя: по существу дугообразный элемент, выполненный с возможностью охвата плеча пациента; удлиненный передний сегмент, соединяемый с передним датчиком/датчиками; и удлиненный задний сегмент, соединяемый с задним датчиком/датчиками. Датчики могут быть активированы для передачи энергии в целевую область и/или считывания энергии, поступающей из целевой области, например, для подачи ЕМ-энергии в легкое с целью вычисления в нем объема жидкости. В альтернативном варианте удерживающий механизм не используется, и оператор может вручную установить датчик/датчики в требуемое положение на основании местоположения датчика/датчиков и заднего установочного элемента относительно друг друга. В другом примере реализации оператор маркирует грудную клетку пациента (например, с использованием стикера, выполненного с помощью маркера) в соответствии с местоположением датчика/датчиков и заднего установочного элемента относительно друг друга, а затем размещает датчик/датчики на метке с помощью удерживающего механизма другой конструкции и/или вручную.
В необязательном варианте предусмотрено, что когда язычок/язычки и/или воротник и/или маркер местоположения на удлиненном элементе заднего установочного элемента размещены в соответствующих целевых анатомических областях (согласно описанию, представленному в настоящем документе), передний датчик и/или задние датчики располагаются на расстоянии в пределах около 2, 3, 4, 6, 8 сантиметров или иных значений или диапазонов значений, где используются указанные или другие значения, от их целевого местоположения, соответствующего целевой области для считывания и/или терапии.
В необязательном варианте предложенное устройство включает в себя язычок, соединенный с передним сегментом удерживающего механизма. Язычок отрегулирован таким образом, что во время работы, когда он располагается в яремной ямке пациента, передний датчик располагается в точно заданной анатомической области пациента для подачи сигналов в целевую область и/или приема сигналов, поступающих из целевой области.
В альтернативном варианте или дополнительно предложенное устройство включает в себя два язычка (или иной индикатор или указатель измеренного расстояния), связанные с передним сегментом удерживающего механизма и/или передним датчиком. Язычки располагаются таким образом, что при их установке одновременно на ключице и грудине передний датчик будет располагаться в точно заданной анатомической области пациента для подачи сигналов в целевую область и/или приема сигналов из целевой области. В необязательном варианте предложенное устройство отрегулировано таким образом, чтобы оно прикладывало определенное усилие к датчикам, прижимая их к грудной клетке пациента, например, за счет системы жестких элементов, соединенных посредством пружин.
В необязательном варианте положение удерживающего механизма относительно заднего установочного элемента регулируется, необязательно в двухмерной плоскости по существу параллельно спине целевого пациента, для соответствия грудным клеткам разных размеров.
В необязательном варианте задний установочный элемент включает в себя воротник, выполненный с возможностью его размещения вдоль шеи и/или одной или обеих сторон шеи и/или плеча/плеч. Воротник характеризуется формой, повторяющей форму целевой анатомической области. В необязательном варианте задний установочный элемент включает в себя воротник, форма которого обеспечивает его соответствие целевому анатомическому ориентиру вдоль линии плеч и/или основания задней части шеи. Компонент воротника может характеризоваться такими размерами и/или формой, которые соответствуют форме и размерам шеи с обеих ее сторон, обеспечивая симметричное расположение воротника вокруг шеи. В необязательном варианте воротник является частью заднего установочного элемента (который задает вертикальное выравнивание датчиков с помощью удерживающего элемента) и задает высоту заднего установочного элемента относительно линии плеч и/или основания задней части шеи.
Язычок и/или маркер местоположения в нижней части удлиненного элемента и/или воротник (иногда совместно именуемые «элементами позиционирования») выполнены с возможностью их наложения на заданные анатомические области грудной клетки целевого пациента (необязательно вдоль яремной ямки, позвоночника и основания задней части шеи, соответственно, согласно описанию, представленному в настоящем документе, например, на основании визуального и/или механического совмещения соответствующего элемента анатомического позиционирования с анатомическим ориентиром). Элементы позиционирования и механические элементы (т.е. датчики, закрепленные на удерживающем механизме и заднем установочном элементе) соединены механическим способом так, что когда элементы позиционирования находятся в правильном анатомическом положении, датчики, закрепленные на удерживающем механизме, оказываются в надлежащем требуемом положении на грудной клетке относительно целевых областей. Когда элементы позиционирования (т.е. один или несколько таких элементов, как язычок и/или маркер местоположения в нижней части удлиненного элемента и/или воротник) находятся на своем месте, передние и/или задние датчики располагаются в требуемом положении с удерживающим механизмом, располагающимся в одной или нескольких немного отличающихся друг от друга ориентациях. Механическое соединение удерживающего механизма и заднего установочного элемента может регулироваться (например, по расстоянию и/или ориентации), вследствие чего корректируется положение датчиков относительно элементов позиционирования.
Удерживающий элемент может быть выполнен таким образом, чтобы можно было изменять расстояние и/или относительное положение датчиков согласно описанию, представленному в настоящем документе. Удерживающий элемент может прикладывать определенное усилие для большего прижатия датчиков к грудной клетке согласно описанию, представленному в настоящем документе.
Один из аспектов настоящего изобретения относится к способу установки в требуемое положение передних и/или задних датчиков в целевой области груди конкретного пациента. Может быть предусмотрено устройство, описанное в настоящем документе. Задний установочный элемент размещается на спине пациента в соответствии с положением воротника, располагающегося вдоль линии плеч и/или основания шеи, и маркера местоположения в нижней части удлиненного элемента, находящегося в целевой анатомической области позвоночника. Вместе с тем, после соединения компонентов устройства удлиненный элемент заднего установочного механизма устройства будет располагаться параллельно и поверх длинной оси позвоночника целевого пациента. Дугообразный сегмент удерживающего механизма проходит поверх плеча целевого пациента. Передние и/или задние датчики располагаются на грудной клетке. Язычок, соединенный с удлиненным передним сегментом удерживающего механизма, располагается в яремной ямке таким образом, что дополнительно корректируется положение переднего датчика/датчиков, соединенных с удлиненным передним сегментом, на груди целевого пациента, что обеспечивает их размещение в требуемом месте на груди человека. Датчики и/или элементы терапии могут активироваться для подачи энергии в целевую область и/или получения энергии из целевой области, например, для подачи ЕМ-энергии в легкое и/или фокусированного ультразвука для абляции, и/или для других целей согласно описанию, представленному в настоящем документе. Полученные сигналы могут быть обработаны, например, для вычисления объема жидкости в легком. В другом примере сигналы могут вычисляться для регулировки элементов терапии, например, для коррекции фокусированного ультразвука. Пациент может быть диагностирован и/или подвергнут лечению (например, в соответствии с диагнозом, и/или подвергнут лечению энергией, излучаемой датчиками) на основании обработанных сигналов, например, для лечения отека легкого, и/или подачи энергии датчиками.
В контексте настоящего документа термин «датчик» иногда может использоваться взаимозаменяемо с термином «элемент лечебного воздействия» и/или иногда включать в себя этот термин.
По меньшей мере, некоторые варианты осуществления устройства и/или способа, описанные в настоящем документе, решают техническую задачу установки датчиков в требуемое положение на грудной клетке пациента, необязательно повышая точность надлежащего позиционирования датчиков и/или элементов лечебного воздействия (например, аппликаторов энергии для прямого облучения в лечебных целях, фокусированного ультразвука, радиочастотной энергии, аппликатора излучения для лучевой терапии, и/или для подачи, введения или извлечения веществ, например, с помощью шприца или внутрикожно, и/или для видеозондов). В необязательном варианте к датчикам прикладывается давление, когда они входят в контакт с грудной клеткой. Предложенное устройство может повторно применяться к разным пациентам (необязательно разных размеров) для точного размещения датчиков в требуемом положении. Предложенное устройство может повторно применяться к одному и тому же пациенту в ходе проведения разных сеансов для точной повторной установки датчиков в требуемое положение в том же месте (в пределах допустимых отклонений) для каждого сеанса. Техническая задача может быть связана с быстрым и/или простым и/или точным позиционированием датчиков на грудной клетке с целью получения точных результатов измерений для последующего лечения пациента (и/или для диагностирования и планирования лечения, исходя из результатов диагностики, и/или для мониторинга процесса лечения), например, для оценки объема жидкости в одном или обоих легких пациента.
По меньшей мере, некоторые примеры реализации устройства и/или способа, описанные в настоящем документе, направлены на решение медицинской задачи лечения пациента, например, путем подачи энергии для прямого облучения целевой области в лечебных целях (например, с использованием фокусированного ультразвука, радиочастотной энергии, аппликатора излучения) и/или для лечения, выбираемого и/или основанного на данных с датчиков, полученных с грудной клетки пациента, необязательно на основе ЕМ-излучения (или другой энергии, такой как ультразвук или электрические токи), проникающего в ткани в пределах грудной клетки, например, в жидкость, содержащейся в легком/легких, или в иные ткани. Медицинская задача может быть связана с повышением точности считываемых данных, используемых для лечения пациента. Еще одна медицинская задача может быть связана с повышением эффективности процесса получения считываемых данных. Медицинская задача решается предложенным устройством, которое легко устанавливается в требуемое положение на грудной клетке с целью сбора медицинских данных, используемых для лечения пациента.
По меньшей мере, некоторые примеры реализации устройства и/или способа, описанные в настоящем документе, направлены на решение технической задачи удерживающим механизмом и задним установочным элементом, которые выполнены с возможностью их точного и/или повторного размещения у одного или множества анатомических ориентиров на теле пациента. По меньшей мере, в некоторых примерах реализации высота устройства на спине задана относительно основания задней части шеи; латерально - относительно позвоночника пациента; и спереди - относительно яремной ямки пациента. После установки заданных элементов устройства в требуемое положение согласно описанию, представленному в настоящем документе, передние и/или задние датчики (например, ЕМ-приемопередатчики) могут быть размещены в требуемых точках относительно анатомических ориентиров для зондирования целевой области в теле пациента, например, легких.
Перед ознакомлением, по меньшей мере, с одним вариантом осуществления настоящего изобретения следует понять, что заявленное изобретение не обязательно ограничено в своем применении деталями конструкции и конфигурацией компонентов и/или способами, представленными в последующем описании и/или проиллюстрированными на чертежах и/или в примерах реализации. Настоящее изобретение может быть представлено в других вариантах своего осуществления или реализовано или использовано на практике различными способами.
Обратимся теперь к фиг.1, на которой представлена блок-схема, иллюстрирующая устройство 100 (и/или систему 100) для установки в требуемое положение переднего и/или заднего датчика/датчиков на грудной клетке целевого пациента с целью подачи энергии в целевую область конкретного пациента и/или получения энергии из этой области согласно некоторым вариантам осуществления настоящего изобретения.
Устройство 100 включает в себя задний установочный элемент 108, воротник 114 и маркер местоположения, расположенный в нижней части удлиненного элемента 150 заднего установочного элемента 108, что дополнительно и подробно описано ниже.
В необязательном варианте задний установочный элемент 108 имеет почти Y-образную форму; при этом воротник имеет такую форму, которая примерно соответствует форме коротких верхних плеч буквы Y, а удлиненный элемент 150 заднего установочного элемента 108 имеет такую форму, которая примерно соответствует форме длинного плеча буквы Y.
В необязательном варианте устройство 100 включает в себя удерживающий механизм 102, который соединяется (например, механически скрепляется с интегральным компонентом с использованием магнитов) с задним установочным механизмом 108 согласно описанию, представленному в настоящем документе.
Удерживающий механизм 102, имеющий почти U-образную форму, включает в себя по существу дугообразный сегмент 102А (для наложения на плечо целевого пациента); удлиненный передний сегмент 102В для соединения, по меньшей мере, с одним передним датчиком 104А, входящим в контакт с грудью целевого пациента; и удлиненный задний сегмент 102С для соединения, по меньшей мере, с одним задним датчиком 104В, входящим в контакт со спиной целевого пациента. В необязательном варианте и положение, и/или ориентация обоих датчиков из числа переднего датчика/датчиков 104А и заднего датчика/датчиков 104В могут регулироваться. В альтернативном варианте положение и/или ориентация одного датчика является фиксированной, тогда как положение и/или ориентация другого датчика является регулируемой; например, фиксированным является передний датчик, а регулируемым - задний датчик, или же регулируемым является передний датчик, а задний датчик - фиксированным.
Элемент 106А позиционирования переднего датчика может соединять передний датчик/датчики 104А с передним сегментом 102В. Элемент 106А позиционирования переднего датчика может быть выполнен с возможностью регулирования расстояния и/или ориентации переднего датчика/датчиков 104А с одной или несколькими степенями свободы (например, шестью); и он может быть реализован, например, в виде раздвижного элемента и/или подвеса. Элемент 106В позиционирования заднего датчика может соединять задний датчик/датчики 104В с задним сегментом 102С. Элемент 106В позиционирования заднего датчика может быть выполнен с возможностью коррекции расстояния и/или ориентации заднего датчика/датчиков с одной или несколькими степенями свободы (например, шестью); и он может быть реализован, например, в виде подвеса. Элементы 106А-В позиционирования передних и/или задних датчиков могут регулировать расстояние и/или ориентацию соответствующих передних и/или задних датчиков 104-В для обеспечения их соответствия форме поверхности грудной клетки, с которой они входят в контакт.
Примеры реализации датчика 104А и/или 104В включают в себя ЕМ-приемопередатчики и ультразвуковые передатчики. В альтернативном варианте или дополнительно датчики 104А и/или 104В могут заменяться и/или объединяться с элементами терапии. Примеры реализации датчиков и/или элементов 104А-В терапии включают в себя: элементы лечебного воздействия; аппликаторы энергии для прямого облучения в лечебных целях; фокусированный ультразвук, подаваемый ультразвуковыми передатчиками; RF-энергию, подаваемую RF-передатчиками; аппликатор излучения для лучевой терапии, подаваемой излучающим элементом; и/или они используются для подачи, введения или извлечения веществ, например, с помощью шприца или внутрикожно, и/или для видеозондов.
Датчики 104А и/или 104В могут соединяться с удерживающим механизмом 102 с помощью выдвижных штанг, выдвигаемых вручную и/или автоматически (например, элементов 106А-В позиционирования переднего и заднего датчиком) для обеспечения лучшего соответствия и/или подгонки под грудную клетку пациента. Выдвижные штанги могут необязательно включать в себя измерительный элемент (например, линейку, сенсор), обеспечивающий возможность количественного определения степени выдвижения для оценки его влияния на позиционирование датчика.
Датчики 104А и/или 104В могут выдвигаться из своих соответствующих корпусов в направлении тела объекта для создания эффекта повышения присоединительного усилия, например, прижатия с помощью пружины.
Передний сегмент 102В (или элемент 105А позиционирования переднего датчика) может включать в себя язычок 112. Язычок 112 отрегулирован таким образом, что во время работы, когда язычок входит в контакт с яремной ямкой целевого пациента, положение переднего датчика 104А (или элемента 106А позиционирования переднего датчика) дополнительно корректируется относительно груди в требуемом месте, которое соответствует целевой области. Язычок 112 способствует дополнительной корректной регулировке положения переднего датчика 104А.
В каудальной области заднего установочного элемента 108 предусмотрен воротник 114, выполненный с возможностью наложения на анатомическую область линии плеч и/или основания задней части шеи. Задний установочный элемент 108 также содержит удлиненный элемент 150 с маркером 150А местоположения, обеспечивающим требуемое позиционирование у заданного анатомического ориентира параллельно и поверх длинной оси позвоночника целевого пациента. В процессе использования задний установочный элемент 108 регулируется таким образом, чтобы установить задний сегмент удерживающего механизма 102С в заданное положение относительно целевого пациента, при этом передний датчик 104А и/или задний датчик 104В располагаются надлежащим образом для подачи энергии в целевую область и/или считывания энергии, поступающей из целевой области. Во время использования воротник 114 задает высоту заднего установочного элемента 108 и опосредованно - высоту задней части удерживающего механизма 102 и заднего датчика 104В.
Маркер 150А местоположения может быть реализован, например, в виде риски, отверстия, метки и/или иного визуально заметного и/или физически уникального признака удлиненного элемента 150 заднего установочного элемента 108.
Задний установочный элемент 108 может включать в себя регулировочный механизм 110, предназначенный для коррекции положения удерживающего механизма 102 относительно заднего установочного элемента 108, необязательно в двухмерной плоскости (например, непрерывно и/или пошагово) по существу параллельно спине целевого пациента. Регулировка осуществляется для обеспечения подгонки под грудные клетки разных размеров с тем, чтобы передние и/или задние датчики располагались в требуемой целевой области грудных клеток разных размеров. Регулировочный механизм 110 может быть интегрирован в удлиненный элемент 150 согласно описанию, представленному в настоящем документе.
Удерживающий механизм 102 и задний установочный элемент 108 имеют такие размеры и форму и регулируются таким образом, чтобы обеспечить установку в требуемое положение переднего датчика 104А и/или заднего датчика 104В в целевой области, находящейся в пределах, например, одного из следующих органов: левого легкого, правого легкого, правой средней доли, правой верхней доли, правой нижней доли, левой верхней доли, левой нижней доли, сердца, трахеи и сочетаний указанных органов.
Устройство 100 может быть использовано для обеспечения точного позиционирования аппликаторов, зондов, датчиков и тому подобного в любом положении на грудной клетке объекта, в том числе, например, с левой стороны грудной клетки объекта.
Позиционирование устройства 100 на грудной клетке обеспечивает возможность установки в требуемое положение внешних элементов относительно внутренних органов в теле объекта, например, относительно правого легкого, левого легкого, сердца, трахеи и т.п. Позиционирование может быть рассчитано таким образом, что при этом обходятся конкретные органы, например, диафрагма, позвоночник, ключица и пр.
Разновидности устройства 100 могут предусматривать, например, замену и/или включение аппликаторов и/или элементов терапии и/или зондов вместо и/или в дополнение к передним и/или задним датчикам, использованием одинарного датчика спереди и/или сзади, множества датчиков спереди и/или сзади.
Ниже описаны дополнительные необязательные компоненты, которые могут быть подсоединены к устройству 100.
В необязательном варианте устройство 100 включает в себя и/или сообщается с вычислительным устройством 116, например, с одним или несколькими следующими устройствами: сервером, вычислительным облаком, мобильным устройством, стационарным компьютером, виртуальной машиной, виртуальным сервером, компьютерным терминалом с ограниченным программным обеспечением, смартфоном, планшетным компьютером, ноутбуком, носимым компьютером, умными очками и умными часами. Вычислительное устройство 116 может быть интегрировано (полностью или только некоторые его компоненты и/или признаки) в устройство 100. Вычислительное устройство 116 может быть реализовано в виде надстройки к имеющейся рабочей станции и/или иным устройствам, например, для отображения GUI (графического интерфейса пользователя), полученного в результате обработки данных сдатчиков.
Вычислительное устройство 116 может принимать выходные сигналы с датчиков 104А и/или 104В (например, необработанные сигналы и/или обработанные сигналы, такие как цифровой сигнал, преобразуемый из результатов аналоговых измерений, проводимых датчиками), необязательно через один или несколько интерфейсов 130 датчиков, например, проводное соединение (например, физический порт, например, кабель, соединяющий датчики с портом), беспроводное соединение (например, антенну), локальную шину, порт для подключения устройства хранения данных, сетевую интерфейсную плату, физический интерфейс в других вариантах исполнения и/или виртуальные интерфейсы (например, программный интерфейс, соединение VPN (виртуальную защищенную сеть), интерфейс прикладного программирования (API), пакет средств для разработки программного обеспечения (SDK)).
Устройство 100 может быть выполнено из материалов, включающих в себя, например, пластмассу, металл, каучук (для некоторых частей), нейлон, силикон, полиуретан (PU), поликарбонат (PC), ABS (акрилонитрил-бутадиен-стирен), ABS (без PC), PC-ABS и комбинации указанных материалов с учетом факторов механических свойств, таких как жесткость, вес, стойкость к износу и тому подобное.
Вычислительное устройство 116 может управлять подачей энергии датчиком 104А и/или 104В, например, путем передачи сигналов через интерфейс 130 датчиков. Интерфейс датчиков может необязательно включать в себя электронный модуль для генерирования и/или приема и/или обработки аналоговых или цифровых сигналов с датчиков.
Вычислительное устройство 116 может включать в себя локально сохраненное программное обеспечение, например, код 132А, хранящийся в памяти 132, который при его исполнении аппаратным процессором/процессорами 120 приводит в действие один или несколько вычислительных признаков, описанных в настоящем документе, и/или может функционировать в качестве одного или нескольких серверов (например, сетевого сервера, веб-сервера, вычислительного облака и виртуального сервера), которые предоставляют услуги (например, выполняют одну или несколько стадий, описанных в привязке к фиг. 1) одному или нескольким клиентским терминалам 140 и/или одному или нескольким серверам 138, например, централизованную обработку данных, удаленно получаемых с датчиков. Такие услуги могут предоставляться по сети 136, например, предоставляя программное обеспечение как услугу (SaaS) на клиентский терминал/терминалы 140, предоставляя приложение для локальной загрузки на клиентский терминал/терминалы 140 в качестве расширения веб-браузера и/или иного приложения для обработки датчиками, и/или предоставляя функции клиентским терминалам 140 с использованием сеанса удаленного доступа, например, через веб-браузер, интерфейс прикладного программирования (API) и/или пакет средств для разработки программного обеспечения (SDK).
В необязательном варианте вычислительное устройство 116 управляет срабатыванием переднего датчика/датчиков 104А и/или заднего датчика/датчиков 104В, принимает выходные сигналы с переднего датчика/датчиков 104А и/или заднего датчика/датчиков 104В и приблизительно вычисляет объем жидкости в целевой ткани (например, в легком) конкретного пациента на основании выходных данных.
Аппаратный процессор/процессоры 120 могут быть реализованы, например, в виде центрального процессора/процессоров (CPU), графического процессора/процессоров (GPU), программируемой логической матрицы/матриц типа FPGA, цифрового сигнального процессора/процессоров (DSP) и специализированной заказной интегральной схемы/схем (ASIC). Процессор/процессоры 120 могут включать в себя один или несколько процессоров (на однородных или неоднородных элементах), которые могут быть выполнены с возможностью обеспечения параллельной обработки данных в виде кластеров и/ли одного или нескольких многоядерных блоков обработки данных.
В памяти 132 (также именуемой в настоящем документе хранилищем программ и/или устройством хранения данных) хранятся программные команды, исполняемые аппаратным процессором/процессорами. Она может представлять собой, например, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM) и/или накопитель данных, например, блок энергонезависимой памяти, магнитные носители, полупроводниковые запоминающие устройства, жесткий диск, съемный накопитель данных и оптические носители (например, DVD (видеодиск с цифровой записью), CD-ROM (дисковод для чтения компакт-дисков)). Например, в памяти 132 может храниться код 132А, который приводит в действие один или несколько вычислительных признаков, описанных в настоящем документе.
Вычислительное устройство 116 может включать в себя устройство 122 хранения данных, предназначенное для хранения данных, например, сигналов, получаемых от датчиков. Устройство 122 хранения данных может быть реализовано, например, в виде памяти, локального жесткого диска, съемного носителя, оптического диска, накопителя и/или удаленного сервера и/или вычислительного облака (например, с доступом через сеть 136).
Вычислительное устройство 116 может включать в себя интерфейс 134 данных, необязательно сетевой интерфейс, для подключения к сети 136, например, одного или нескольких следующих устройств: сетевой интерфейсной платы, беспроводного интерфейса для подключения к беспроводной сети, физического интерфейса для подключения к кабелю с целью обеспечения сетевой связности, виртуального интерфейса, реализованного в виде программы, сетевой коммуникационной программы, обеспечивающей более высокий уровень сетевой связности, и/или в виде иных вариантов реализации. Вычислительное устройство 116 может иметь доступ к одному или нескольким удаленным серверам 138 с использованием сети 138, например, для получения обновлений кода 132А и/или для получения других данных (например, медицинских данных о пациенте из EMR (электронной медицинской карты) пациента).
Следует отметить, что интерфейс 130 датчиков и интерфейс 134 данных могут быть реализованы в виде одинарного интерфейса (например, сетевого интерфейса, одинарного программного интерфейса) и/или двух автономных интерфейсов, таких как программные интерфейсы (например, интерфейсы API, сетевые порты) и/или аппаратные интерфейсы (например, два сетевых интерфейса) и/или сочетания интерфейсов (например, одинарного сетевого интерфейса и двух программных интерфейсов, двух виртуальных интерфейсов на общем физическом интерфейсе, виртуальных сетей на общем сетевом порту). Термин/компонент «интерфейс 130 датчиков» иногда может использоваться взаимозаменяемо с термином «интерфейс 134 данных».
Вычислительное устройство 116 может сообщаться, используя для этого сеть 134 (или иной канал связи, такой как линия прямой связи (например, кабельная или беспроводная) и/или линия непрямой связи (например, через промежуточное вычислительное устройство, такое как сервер, и/или через накопитель) с одним или несколькими следующими устройствами: сервером/серверами 138, клиентским терминалом/терминалами 140 и/или датчиками и/или иными устройствами, например, в зависимости от разных архитектурных решений, описанных в настоящем документе.
Вычислительное устройство 116 включает в себя и/или сообщается с интерфейсом 118 пользователя, который содержит механизм, выполненный с возможностью ввода данных пользователем (например, ввода данных о личности пациента) и/или просмотра данных пользователем (например, анализа сигналов, полученных датчиком/датчиками). Примеры реализации интерфейсов 118 пользователя включают в себя, например, одно или несколько следующих устройств: сенсорный экран, дисплей, клавиатуру, мышь, очки дополненной реальности, очки виртуальной реальности и программное обеспечение с голосовым управлением, при котором используются динамики и микрофон. Интерфейс 116 пользователя может включать в себя графический интерфейс пользователя (GUI), отображаемый на дисплее и выполненный с возможностью ввода данных и/или просмотра данных пользователем.
Обратимся теперь к фиг. 2, на которой приведен один из примеров реализации устройства 200 для установки в требуемое положение переднего датчика/датчиков 204А и/или заднего датчика/датчиков 204В на грудной клетке целевого пациента согласно некоторым вариантам осуществления настоящего изобретения. Компоненты устройства 200 могут быть выполнены на базе компонентов устройства 100, описанного в привязке к фиг. 1, объединяться с этими компонентами и/или заменяться ими.
Устройство 200 включает в себя удерживающий механизм 202, который содержит дугообразный сегмент 202А, удлиненный передний сегмент 202В и удлиненный задний сегмент 202С согласно описанию, представленному в настоящем документе. Удерживающий механизм 202 имеет форму буквы U, первое плечо которой короче второго плеча. Передний сегмент 202В удерживающего механизма 202 соответствует первому плечу буквы U. Задний сегмент 202С соответствует второму плечу. Дугообразный сегмент 202А соответствует изогнутому участку буквы U.
Необязательный элемент 206А позиционирования переднего датчика соединяет передний датчик 204А с передним сегментом 202В. Элемент 206А позиционирования переднего датчика предназначен для коррекции ориентации переднего датчика 204А, контактирующего с грудью целевого пациента, соответствующей целевой области, и он может быть выполнен, например, в виде подвеса. Необязательный элемент 206В позиционирования заднего датчика соединяет задний датчик 204В с задним сегментом 202С. Элемент 206В позиционирования заднего датчика предназначен для коррекции ориентации заднего датчика 204В, контактирующего со спиной целевого пациента, соответствующей целевой области, и он может быть выполнен, например, в виде подвеса.
В необязательном варианте элемент 206А позиционирования переднего датчика включает в себя язычок 212 согласно описанию, представленному в настоящем документе.
Устройство 200 содержит задний установочный элемент 208, который включает в себя удлиненный элемент 250, необязательный регулировочный механизм 210 и необязательный воротник 214 согласно описанию, представленному в настоящем документе.
Устройство 200 может включать в себя необязательную выдвижную штангу/штанги 280 для обеспечения его лучшего соответствия и/или подгонки под грудную клетку пациента согласно описанию, представленному в настоящем документе.
Обратимся теперь к фиг. 3, на которой схематически изображен лишь сам удерживающий механизм 202, не соединенный с задним установочным элементом, согласно некоторым вариантам осуществления настоящего изобретения.
Обратимся теперь к фиг. 4, на которой представлено схематическое изображение, иллюстрирующее вид сбоку устройства 200 в нерабочем состоянии согласно некоторым вариантам осуществления настоящего изобретения. Удерживающий механизм 202 включает в себя множество жестких сегментов (например, дугообразный сегмент 202А и/или удлиненный передний сегмент 202В и/или удлиненный задний сегмент 202С), соединенных посредством подпружиненных шарниров 252, выполненных с возможностью коррекции расстояния 254 между передним датчиком/датчиками 204А и задним датчиком/датчиками 204В, а в необязательном варианте - приложения пружинного усилия для прижатия переднего датчика/датчиков 204А и/или заднего датчика/датчиков 204В к грудной клетке целевого пациента. В альтернативном варианте или дополнительно удерживающий механизм 202 выполнен с возможностью смещения с целью прижатия переднего датчика/датчиков 204А и/или элемента 206А позиционирования переднего датчика и заднего датчика/датчиков 204В и/или элемента 206В позиционирования заднего датчика друг к другу; при этом удерживающий механизм выполнен, например, из материала, обладающего свойством упругости, например, из металла со свойствами упругости, пластмассы в сочетании с пружинами и/или каучука, с тем, чтобы удерживающий механизм 202 мог быть разнесен для увеличения расстояния 254 с целью подстраивания под грудную клетку пациента. Во время использования, когда расстояние 254 увеличивается для подстраивания под грудную клетку, удерживающий механизм 202 прикладывает определенное усилие с целью прижатия переднего датчика/датчиков 204А и/или элемента 206А позиционирования переднего датчика и заднего датчика/датчиков 204В и/или элемента/элементов 206В позиционирования заднего датчика друг к другу, вследствие чего передний датчик/датчики 204А прижимаются к груди, а задний датчик/датчики 204В - к спине.
В альтернативном варианте или дополнительно элемент 206А позиционирования переднего датчика и/или элемент 206В позиционирования заднего датчика могут включать в себя механизм (например, пружину или надувной элемент) для выдвижения соответствующих датчиков 204А-В из корпуса в направлении грудной клетки с целью создания эффекта повышения контактного усилия.
В необязательном варианте удлиненный передний сегмент 202В и/или удлиненный задний сегмент 202С включают в себя множество жестких сегментов, соединенных посредством шарниров, в необязательном варианте - подпружиненных. Такая конструкция может обеспечить лучшую адаптацию к форме и/или размерам грудной клетки.
Другие варианты архитектуры могут включать в себя, например: меньшее или большее число жестких сегментов; и другие механические конструктивные элементы, обеспечивающие возможность изменения расстояний 254 и/или усилий, например, за счет использования стягивающих полос, прикладывающих усилие между датчиками, или напрямую, и/или через удерживающий механизм, и/или за счет использования ходового винта в конструкции защелкивающегося типа.
Усилие, прикладываемое через элементы 202В-С удерживающего механизма 202, может прикладываться с тем, чтобы обеспечить надлежащий контакт с грудной клеткой (например, для эффективной подачи энергии на грудную клетку и/или получения энергии со стороны грудной клетки, например, электромагнитной энергии, электрических токов, ультразвука и т.п.), и/или для обеспечения неподвижности устройства 200 во время его использования и нахождения в требуемом месте на грудной клетке.
Обратимся теперь к фиг. 5, на которой представлено схематическое изображение устройства 200, где удерживающий механизм 202 разведен на максимальное расстояние 254 и/или рабочее расстояние 254 между передним датчиком 204А и задним датчиком 204В, согласно некоторым вариантам осуществления настоящего изобретения. Следует отметить, что в процессе эксплуатации в большинстве случаев не обязательно достигается максимальное расстояние.
В необязательном варианте устройство 202 включает в себя один или несколько элементов для вычисления расстояния 254 между передним датчиком 204А и задним датчиком 204В во время эксплуатации устройства. Примеры вычислений расстояния 254 включают в себя: автоматические вычисления на основании данных с датчиков, расположенных в удерживающем механизме; прямое измерение окружного расстояния на основе информации, полученной с датчиков угловых или линейных измерений (например, с использованием кодеров на базе потенциометров или оптических кодеров, расположенных в шарнирах многосекционной шарнирной конструкции или выдвижных штангах, описанных в настоящем документе), причем удерживающий механизм может содержать регулируемые части (например, выдвижные элементы), обеспечивающие возможность коррекции положения и/или ориентации датчика относительно удерживающего механизма, поддающейся измерению.
Обратимся теперь к фиг. 6, на которой представлено схематическое изображение заднего установочного элемента 208 согласно некоторым вариантам осуществления настоящего изобретения.
Задний установочный элемент 208 содержит регулировочный механизм 210 для коррекции положения удерживающего механизма, не показанного на фиг. 6, и заднего установочного элемента 208 относительно друг друга. Удерживающий механизм 202 может быть соединен с регулировочным механизмом 210 посредством соединителя 258.
Регулировочный механизм 210 может быть выполнен с возможностью коррекции положения заднего сегмента 202С удерживающего механизма в пределах определенного расстояния по существу параллельно спине целевого пациента и/или в двухмерной плоскости по существу параллельно спине целевого пациента. В необязательном варианте регулировочный механизм 210 реализован в виде множества селекторов 210A-D стопового положения, распределенных по двухмерной схеме параллельно спине целевого пациента, например, обозначенных как селекторы «А» 210А, «В» 210В, «С» 210С и «D» 210D. Следует отметить, что соединитель 258 в данном случае показан как соединенный с пятым селектором стопового положения. Каждый селектор 210A-D стопового положения (и один непоказанный) располагается в заданном месте на удлиненном сегменте 250 заднего установочного элемента 208 для задания разного положения заднего сегмента удерживающего механизма 202С относительно заднего установочного элемента 208. Местоположение стоповых селекторов может выбираться, например, таким образом, чтобы можно было охватить самых разных пациентов, обладающих более широкими грудными клетками (в соответствии с измерениями переднезаднего диаметра) и/или более длинными грудными клетками (измеряемыми в направлении от головы к ногам).
Каудальный участок заднего установочного элемента 208 (т.е. ближе к голове) соединен с воротником 214, подогнанным под основание задней части шеи и/или линию плеч целевого пациента согласно описанию, представленному в настоящем документе. Воротник 214 имеет такие размеры и/или форму, которые обеспечивают его подгонку под целевую анатомическую область основания задней части шеи и/или линии плеч. В необязательном варианте воротник 214 выполнен по существу из жесткого материала, например, пластмассы и/или металла, что подробнее описано в привязке к фиг. 11.
Во время использования задний установочный элемент 208 размещается на спине целевого пациента путем совмещения маркера местоположения удлиненного элемента 250 с целевой анатомической областью на позвоночнике и воротника 214 с целевой анатомической областью в задней части шеи. Для вертикального размещения задний установочный элемент 208 накладывается на спину пациента, при этом на одну или обе стороны шеи и/или поверх плеча/плеч объекта накладывается и опирается на них жесткий и/или полужесткий элемент 214 в форме воротника. Воротник 214 предназначен для позиционирования заднего установочного элемента 208 относительно основания шеи/линии плеч. Для надлежащего бокового позиционирования удлиненный элемент 250 выравнивается относительно позвоночника, необязательно с использованием элемента выравнивания линии риски с позвоночником, что обеспечивает возможность одновременного определения местоположения позвоночника на ощупь и выравнивания заднего установочного элемента 208. В качестве альтернативы риске для выравнивания относительно позвоночника может быть использовано отверстие в заднем установочном элементе 208, через которое пальцем можно нащупать позвонки, и/или указывающий маркер.
В другом варианте осуществления боковое позиционирование заднего установочного элемента обеспечивается исключительно за счет использования симметричного воротникового элемента (например, с использованием верхнего сегмента воротника, такого как 1104), который при его размещении у анатомического ориентира обеспечивает центровку заднего установочного элемента.
Другой регулируемый соединитель 256 выполнен с возможностью соединения с удерживающим механизмом 202 с целью дополнительной стабилизации удерживающего механизма 202 относительно заднего установочного элемента 208.
Обратимся теперь к фиг. 7, на которой представлено схематическое изображение устройства 200, где удерживающий механизм 202 подсоединен к заднему установочному элементу 208 с помощью соединителей 256 и 258, согласно некоторым вариантам осуществления настоящего изобретения. Соединители 256 и 258 могут регулироваться для коррекции положения и/или ориентации удерживающего механизма 202 относительно заднего установочного элемента 208 согласно описанию, представленному в настоящем документе. Соединители 256 и 258 могут образовывать постоянное соединение или разъемное соединение, например, с использованием защелкивающегося механизма.
В необязательном варианте задний установочный элемент 208 может подсоединяться и/или отсоединяться от удерживающего механизма 202, а надлежащее позиционирование датчиков 204А-В может быть обеспечено за счет отдельного наложения механизма 208 позиционирования на грудную клетку целевого пациента в соответствии с анатомическими маркерами, описанными в настоящем документе (например, наложения воротника на основание задней части шеи), и установки удерживающего механизма 202 в требуемое положение относительно заднего установочного элемента 208 посредством механического соединения удерживающего механизма 202 с задним установочным элементом 208 согласно описанию, представленному в настоящем документе, и/или визуального выравнивания маркеров на удерживающем механизме 202 с помощью маркеров на заднем установочном элементе 208.
Фраза «механическое соединение» иногда может означать использование элементов (например, соединителей), описанных в настоящем документе, с помощью которых задний установочный элемент используется для задания положения на грудной клетке, а удерживающий механизм размещается в определенном месте относительно заднего установочного элемента, что реализуется, например, за счет механического соединения и/или выравнивания элементов, причем удерживающий механизм и задний установочный элемент не обязательно входят друг с другом в физический контакт.
Соединение заднего установочного элемента с удерживающим механизмом, который содержит датчики, необязательно обеспечивает установку заднего датчика в требуемое положение относительно заднего установочного элемента с тем, чтобы достигнуть конкретного заданного положения заднего датчика относительно анатомических ориентиров.
Механическое соединение может регулироваться для достижения разных, заданных и/или измеримых положений датчика относительно анатомических ориентиров с помощью регулировочного механизма 210.
Обратимся теперь к фиг. 8, на которой представлено схематическое изображение, иллюстрирующее удерживающий механизм 202 устройства 200 отдельно от заднего установочного элемента согласно некоторым вариантам осуществления настоящего изобретения. Как можно видеть, язычок 212 механически соединен с элементом 206А позиционирования переднего датчика (например, соединен с его передним сегментом), который соединен с передним датчиком 204А. Как было указано в настоящем документе, местоположение язычка 212 задается таким образом, чтобы во время использования, когда язычок 212 располагается в яремной ямке целевого пациента, передний датчик 204А располагался в требуемом положении для подачи энергии в целевую область пациента и/или получения энергии из этой области.
Обратимся теперь к фиг. 11, на которой представлено схематическое изображение, иллюстрирующее один из примеров реализации воротника 1114, используемого для задания требуемой высоты в заднем установочном механизме, согласно некоторым вариантам осуществления настоящего изобретения. Воротник 1114 соединен с частью заднего установочного элемента, необязательно с его верхним (т.е. каудальным) участком, согласно описанию, представленному в настоящем документе. Схема 1100А представляет собой вид сбоку объекта 1102, носящего воротник 1114. Схема 1100В представляет собой вид сзади объекта 1102, носящего воротник 1114. Воротник 1114 содержит верхний сегмент 1104, выполненный из относительно более гибкого материала в сравнении с нижним сегментом 1106, который выполнен из относительно более жесткого материала. Верхний сегмент 1104 выполнен с возможностью совмещения с верхней частью шеи сзади, а нижний сегмент 1106 выполнен с возможностью совмещения с основанием шеи/плечами.
Воротник 1114 выполнен в виде устройства позиционирования по высоте на основании анатомического маркера линии плеч и/или основания шеи, которое задает высоту относительно анатомического маркера. Воротник 1114 содержит нижний сегмент 1106, размеры и форма которого обеспечивают его опирание на плечи объекта. В необязательном варианте высота подсоединенного заднего установочного элемента задается в пределах 2, 3, 4, 6 или 8 сантиметров или в пределах других значений. Верхний сегмент 1104 выполнен с возможностью необязательной центровки подсоединенного заднего установочного элемента на шее. В необязательном варианте центровочным анатомическим маркером служит позвоночник. В необязательном варианте верхний сегмент 1104 выполнен с возможностью, по меньшей мере, частично охватывать шею с двух сторон до такой степени, чтобы это было достаточно для центровки заднего установочного элемента, например, по дуге в пределах около 40-60 градусов, или около 80-100 градусов, или около 150-210 градусов, или около 215-300 градусов, или около 245-270 градусов, или около 245-315 градусов, или свыше 40 градусов, или свыше 50 градусов, или свыше 90 градусов, или свыше 120 градусов, или в пределах иных значений дуги, отцентрованной посередине задней части шеи и проходящей по ее окружности, или в пределах значений других диапазонов. Верхний сегмент 1104 выполнен с возможностью обеспечения соответствия шеям разных размеров, например, в диаметре около 6-18 сантиметров. В необязательном варианте верхний сегмент 1104 имеет полукруглую конструкцию, по меньшей мере, с одним участком вдоль воротника, который обладает жесткостью менее около 100, 400 или 1000 кН/мм2 или жесткостью других значений.
Обратимся теперь к фиг. 12, на которой схематически показан вид крупным планом, иллюстрирующий один из примеров реализации воротника 1214, используемого для задания требуемой высоты в заднем установочном механизме, согласно некоторым вариантам осуществления настоящего изобретения. Воротник 1214 соединен с задним установочным элементом согласно описанию, представленному в настоящем документе. Воротник 1214 может быть реализован в виде воротника 1114, показанного на фиг. 11; в виде воротника 114, показанного на фиг. 1; в виде воротника 214, показанного на фиг. 2 (и в виде воротника, показанного на других фигурах); в ином виде; и/или в виде сочетания указанных вариантов.
Обратимся теперь к фиг. 9А-9С, где представлены схемы и/или изображения, иллюстрирующие один из примеров установочного устройства 200 на целевом пациенте 970 согласно некоторым вариантам осуществления настоящего изобретения. Устройство 200 выполнено таким, каким оно описано в настоящем документе, например, как оно описано в привязке к фиг. 1-8. Устройство 200 может быть размещено на пациенте 970 так, как это описано выше, например, как это описано в привязке к фиг. 10. Следует отметить, что кабель 972 соединяет устройство с вычислительным устройством согласно описанию, представленному в настоящем документе. Фиг. 9А представляет собой перспективное изображение пациента 970, носящего устройство 200. Фиг. 9В представляет собой вид спереди. Фиг. 9С представляет собой вид сзади.
Обратимся теперь к фиг. 10, на которой представлена блок-схема, иллюстрирующая алгоритм реализации способа установки в требуемое положение переднего и/или заднего датчика/датчиков на грудной клетке в целевой области конкретного пациента согласно некоторым вариантам осуществления настоящего изобретения. В отношении устройства, описанного в настоящем документе, например, описанного в привязке к фиг. 1-9А-С, может быть использован способ, проиллюстрированный на фиг. 10.
На стадии 1002 осуществляется выбор пациента, например, лечебное воздействие, оказываемое датчиками, и/или сбор данных датчиками.
На стадии 1004 выбирается одно из возможных предварительно задаваемых положений удерживающего механизма относительно заднего установочного элемента, необязательно с использованием регулировочного механизма. Этот выбор может осуществляться с учетом размеров груди.
Выбор положения удерживающего механизма может основываться на разных данных, относящихся к характеристикам целевого пациента, например, анатомических размеров, веса, роста, размеров грудной клетки, физического состояния, возраста, патологий и/или медицинских показаний, например, показаний, влияющих на анатомию пациента. Например, для высоких пациентов ростом, к примеру, свыше 155 см, могут быть выбраны крайние левые стоповые положения 210С или 210D согласно описанию в привязке к фиг. 6. В другом примере для объектов, у которых окружность грудной клетки превышает пороговое значение, например, когда окружное расстояние между датчиками превышает другое пороговое значение, могут быть выбраны крайне правые стоповые положения, т.е. 210В или 210D. Стоповое положение может быть выбрано автоматически с помощью кода на основании характеристики/характеристик целевого пациента, вводимых автоматически (например, угловыми датчиками на шарнирах удерживающего механизма) или вручную.
В другом варианте своего осуществления может быть предусмотрен удерживающий механизм фиксированных размеров (например, одноразового использования), причем доступны разные размеры удерживающих элементов, которые могут выбираться для каждого конкретного человека на основе данных, относящихся к характеристикам целевого пациента, например, анатомических размеров, веса, роста, размеров грудной клетки, физического состояния, возраста, патологий и/или медицинских показаний, например, показаний, влияющих на анатомию пациента.
На стадии 1006 задний установочный элемент размещается на спине пациента.
В необязательном варианте маркер местоположения в нижней части удлиненного элемента заднего установочного элемента располагается в целевой точке на позвоночнике. Когда маркер местоположения находится в требуемом положении, удлиненный элемент располагается параллельно и поверх длинной оси позвоночника целевого пациента. В альтернативном варианте или дополнительно воротник заднего установочного элемента располагается на основания задней части шеи и/или линии плеч целевого пациента.
На стадии 1008 удерживающий механизм накладывается поверх грудной клетки пациента. Удерживающий механизм может располагаться с левой или правой стороны пациента.
Дугообразный сегмент удерживающего механизма располагается поверх левого или правого плеча целевого пациента таким образом, что передний датчик/датчики и задний датчик/датчики располагаются на грудной клетке.
В одном из примеров своего осуществления предложенное устройство выполнено с возможностью установки заднего датчика медиально в пределах около 2-9 сантиметров (см) относительно длинной оси позвоночника и в пределах около 8-30 см ниже верхнего конца позвоночного выступа целевого пациента, например, когда датчики представляют собой ЕМ-датчики, и около 30% эффективной зоны захвата и/или передачи ЕМ-датчиков находится в заданной целевой области.
Следует отметить, что стадии 1006 и 1008 могут выполняться по существу одновременно и/или итерационно и/или последовательно; например, сначала выполняется стадия 1006, а затем следует стадия 1008, во время выполнения которой осуществляется соединение удерживающего механизма с соединителями заднего установочного элемента.
На стадии 1010 корректируется местоположение язычка удерживающего механизма относительно яремной ямки так, что передний датчик/датчики размещаются в требуемой анатомической области.
На стадии 1012 может осуществляться передача энергии (например, RF, ЕМ, ультразвука) с переднего и/или заднего датчика в целевую область конкретного человека, например, в легкое, одну из долей легкого, определенную анатомическую область легкого, сердце, трахею и/или в другие места. Эта энергии может передаваться для диагностики и/или лечения (например, абляции).
На стадии 1014 передние и/или задние датчики измеряют энергию, проходящую через целевую область и/или отражающуюся от целевой области.
На стадии 1016 вычисляется одно или несколько значений на основании выходных данных с датчиков, например, объем жидкости в целевой области (например, в легких, в основании легких), и/или команд для регулировки подаваемой энергии, оказывающей лечебное воздействие.
На стадии 1018 может быть проведена диагностика и/или лечение конкретного человека (т.е. пациента) на основании вычисленных значений; например, он может быть подвергнут лечебному воздействию с целью удаления лишней жидкости из легких и/или подвергнут лечебному воздействию абляционной энергии.
Ожидается, что на протяжении жизни пациента, берущей начало от настоящей заявки, будет разработано множество соответствующих датчиков, и предполагается, что объем термина «датчик» будет априори включать в себя все такие новые технологии.
В контексте настоящего документа термин «около» означает +10%.
Термины «содержит», «содержащий», «включает в себя», «включающий в себя», «имеющий» и их производные означают «включает в себя, помимо прочего».
Термин «состоящий из» означает «включающий в себя, помимо прочего».
Термин «состоящий, главным образом, из» означает, что состав, способ или структура может включать в себя дополнительные ингредиенты, стадии и/или части, но только в том случае, если эти дополнительные ингредиенты, стадии и/или части существенным образом не изменяют основные и новые характеристики заявленного состава, способа или структуры.
В контексте настоящего документа форма единственного числа, на которую указывают определенные и неопределенные артикли, включает в себя форму множественного числа, если только из контекста явственно не вытекает иное. Например, термин «состав» или «по меньшей мере, один состав» может включать в себя множество составов, в том числе их смеси.
По всему тексту данного описания различные варианты осуществления заявленного изобретения могут быть представлены в формате диапазона. Следует понимать, что описание в формате диапазона представлено лишь для удобства восприятия и краткости изложения, и не должно рассматриваться как накладывающее жесткое ограничение на объем настоящего изобретения. Соответственно, описание диапазона должно рассматриваться как включающее в себя конкретно раскрытые поддиапазоны, а также отдельные числовые значения, входящие в такой диапазон. Например, описание такого диапазона как 1-6 должно рассматриваться как включающее в себя конкретно раскрытые поддиапазоны, такие как 1-3, 1-4, 1-5, 2-4, 2-6, 3-6 и т.д., а также отдельные цифры, входящие в этот диапазон, например, 1, 2, 3, 4, 5, и 6. Это правило действует независимо от ширины диапазона.
Всякий раз, когда в настоящем документе указывается диапазон числовых значений, это означает, что он включает в себя любое указанное число (дробное или целое) в пределах указанного диапазона. Фразы «варьирующийся/варьируется в пределах между» первым указанным числом и вторым указанным числом и «варьирующийся/варьируется от» первого указанного числа «до» второго указанного числа используются в настоящем документе взаимозаменяемо и должны включать в себя первое и второе указанные числа, а также все дробные и целые числа между ними.
В контексте настоящего документа термин «способ» относится к методам, средствам, методикам и процедурам для решения конкретной задачи, включая, помимо прочего, методы, средства, методики и процедуры, или известные специалистам-практикам в химической, фармакологической, биологической, биохимической и медицинской областях, или без труда разрабатываемые на основе известных методов, средств, методик и процедур указанными специалистами-практиками.
В контексте настоящего документа термин «лечение» включает в себя подавление, по существу ингибирование, замедление или купирование развития определенного состояния, что по существу устраняет клинические или эстетические симптомы этого состояния или по существу предотвращает появление клинических или эстетических симптомов этого состояния.
Следует иметь в виду, что некоторые признаки настоящего изобретения, которые для ясности описаны в контексте отдельных вариантов его осуществления, также могут быть представлены в определенной комбинации в одном единственном варианте его осуществления. И наоборот, различные признаки настоящего изобретения, которые для краткости изложения описаны в контексте отдельного варианта его осуществления, также могут быть представлены отдельно или в любой подходящей подкомбинации или иным походящим образом в другом описанном варианте осуществления заявленного изобретения. Некоторые признаки, описанные в контексте различных вариантов осуществления настоящего изобретении, не должны трактоваться как основные признаки этих вариантов осуществления, если только без этих элементов конкретный вариант осуществления оказывается неработоспособным.
Содержание всех публикаций, патентов и патентных заявок, указанных в данном документе, полностью включено в настоящий документ посредством ссылки до такой степени, как если бы каждая отдельная публикация, патент или патентная заявка была бы специально и отдельно указана как включенная в настоящий документ посредством ссылки. Кроме того, цитирование или идентификация любой ссылки в данной заявке не следует истолковывать как признание того, что такая ссылка подходит в качестве предшествующего уровня техники по отношению к настоящему изобретению. В тех случаях, когда используются заголовки разделов, они не должны рассматриваться как обязательно носящие ограничительный характер. Кроме того, содержание любого документа/документов, имеющих приоритет над данной заявкой, полностью включено в настоящий документ посредством ссылки.
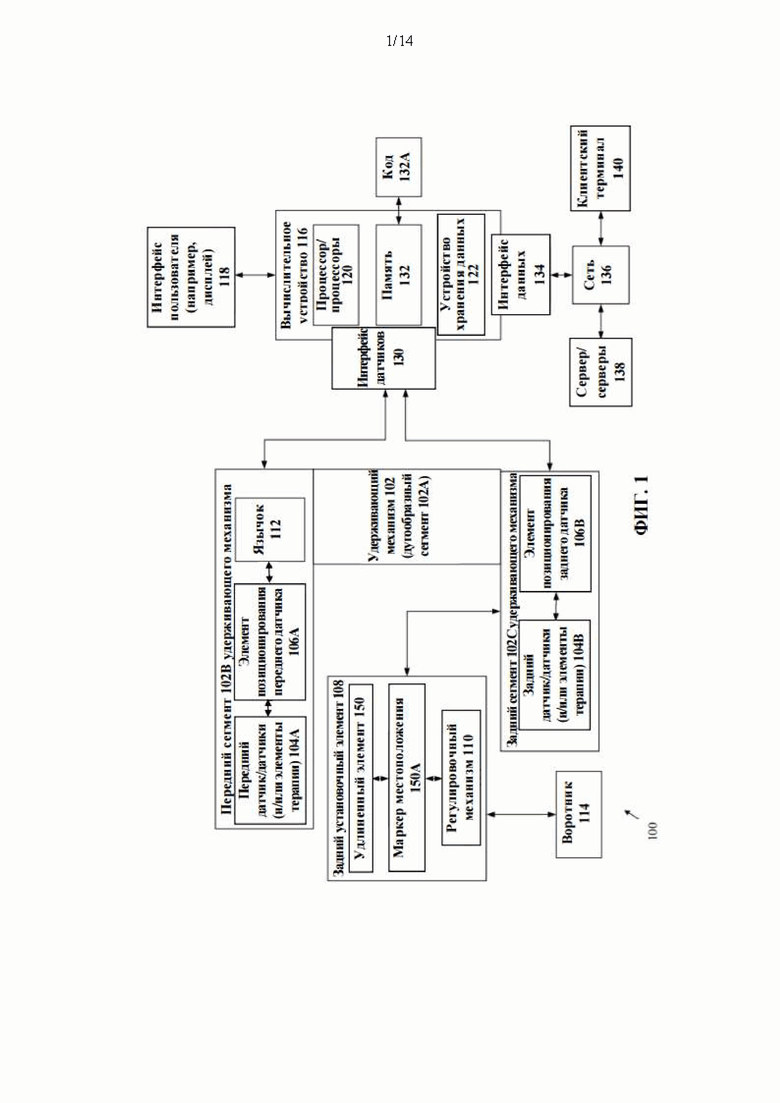
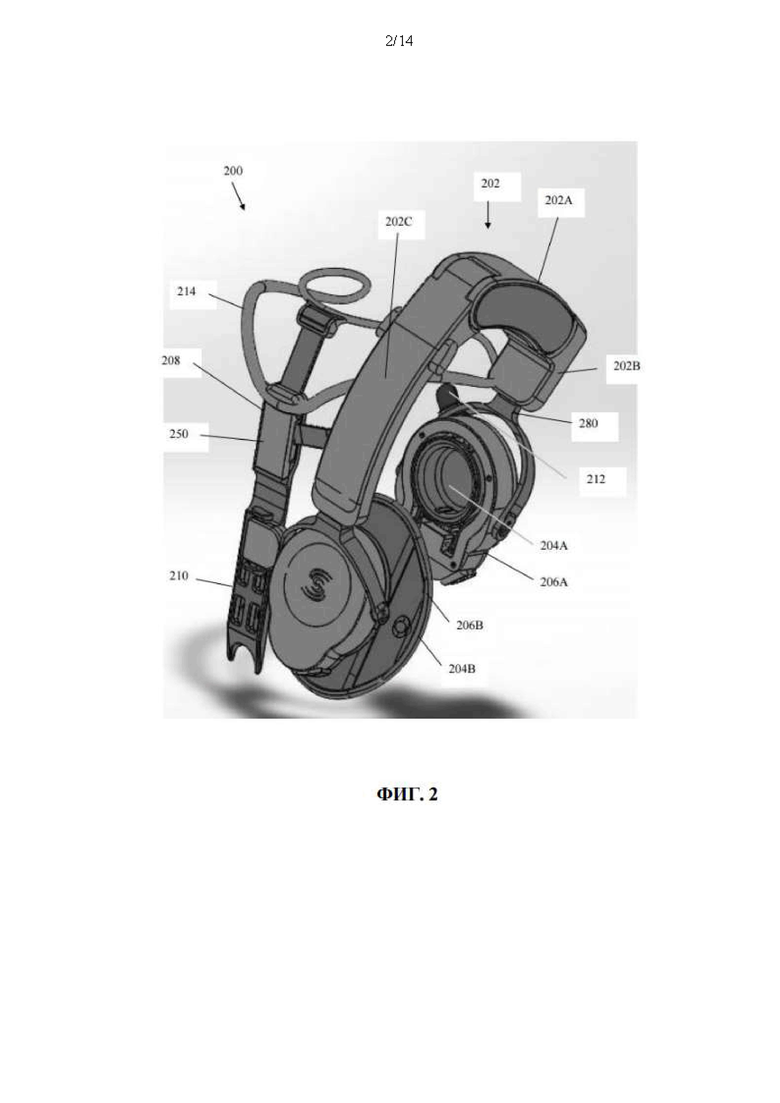
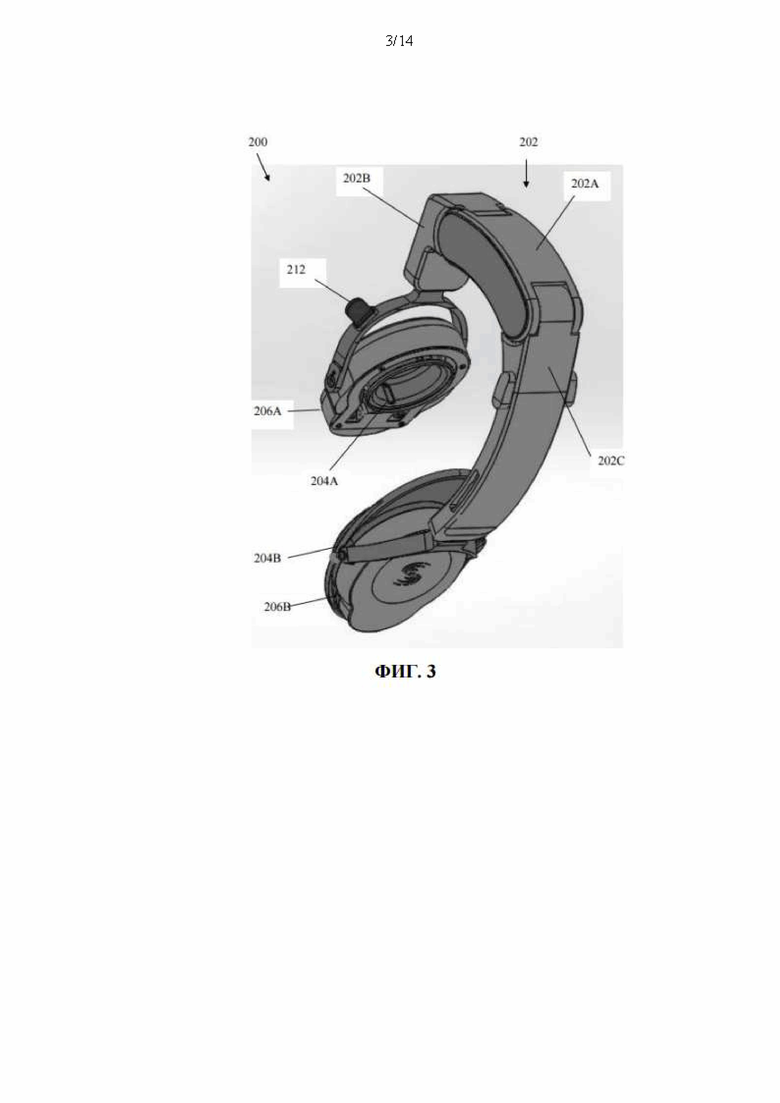
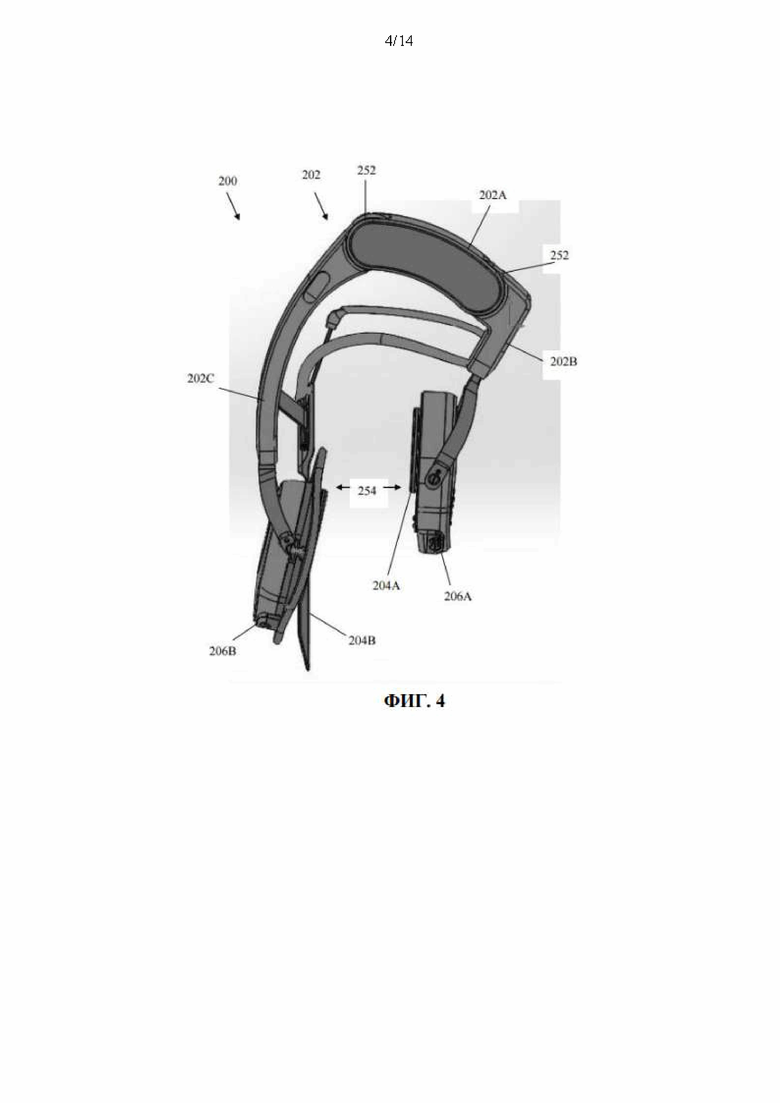

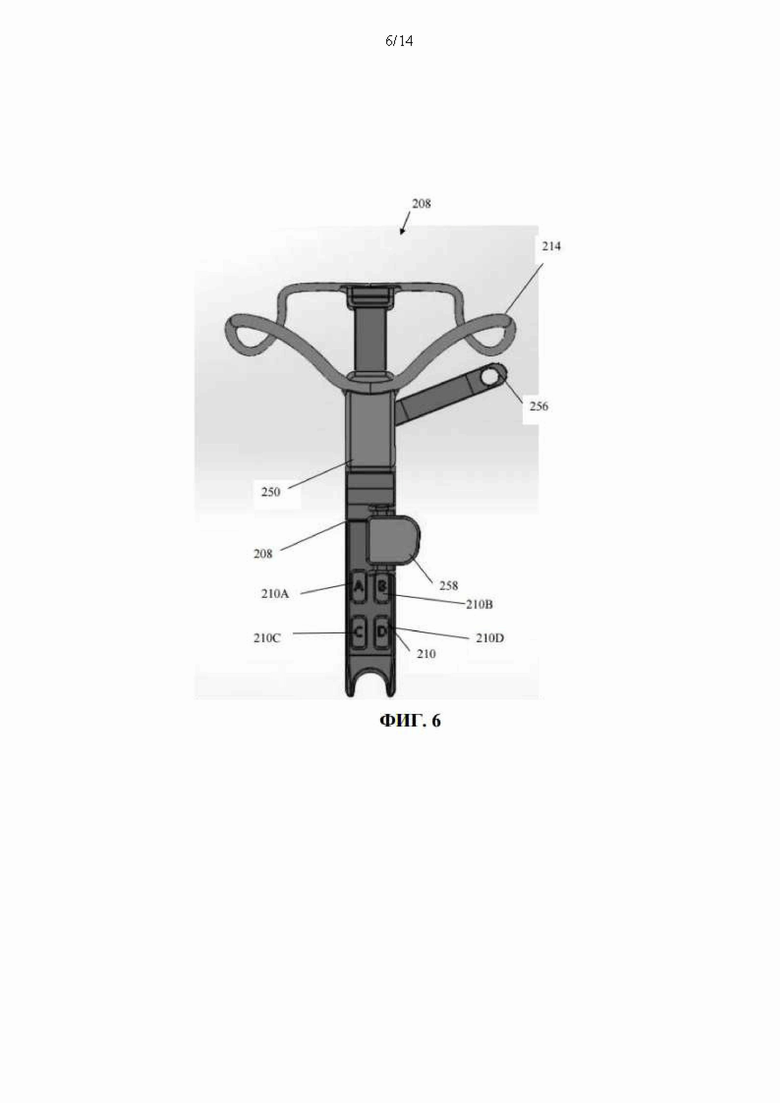
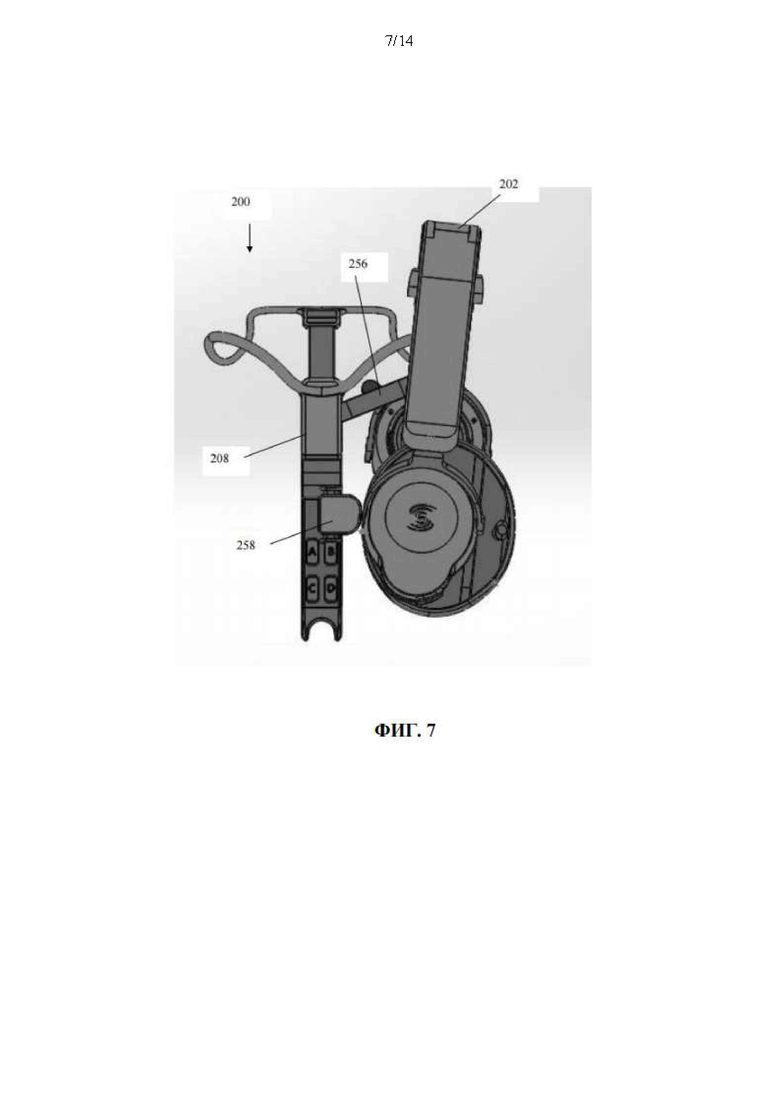
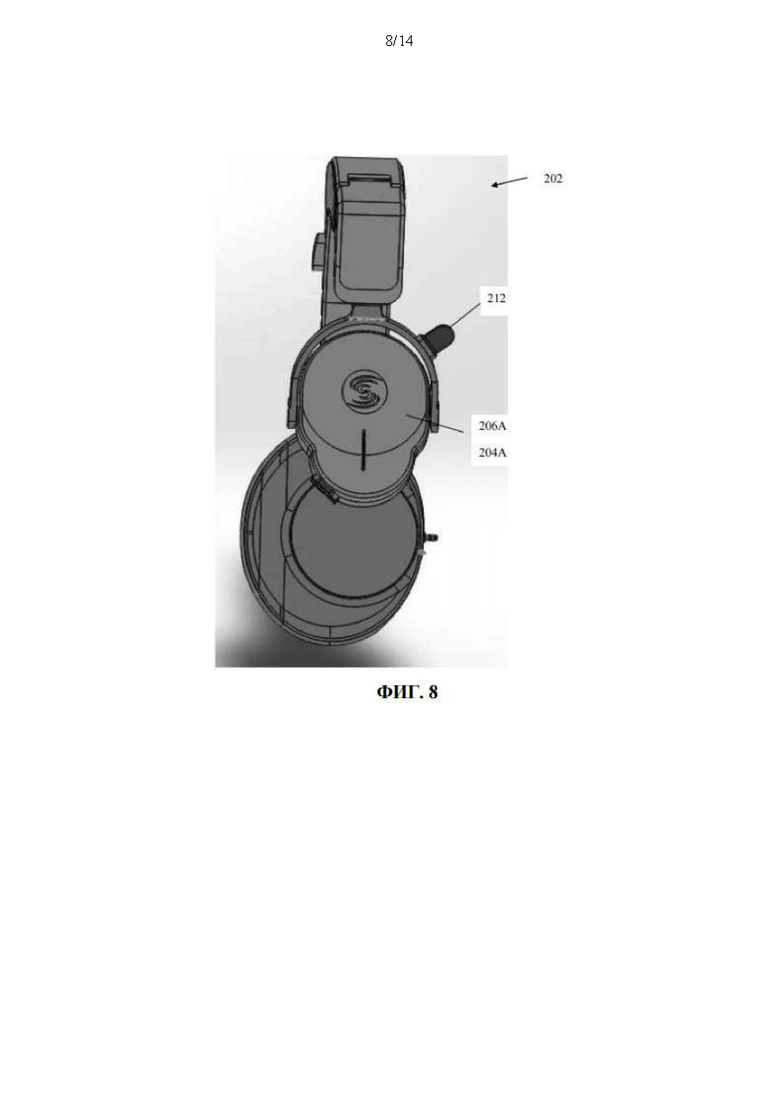
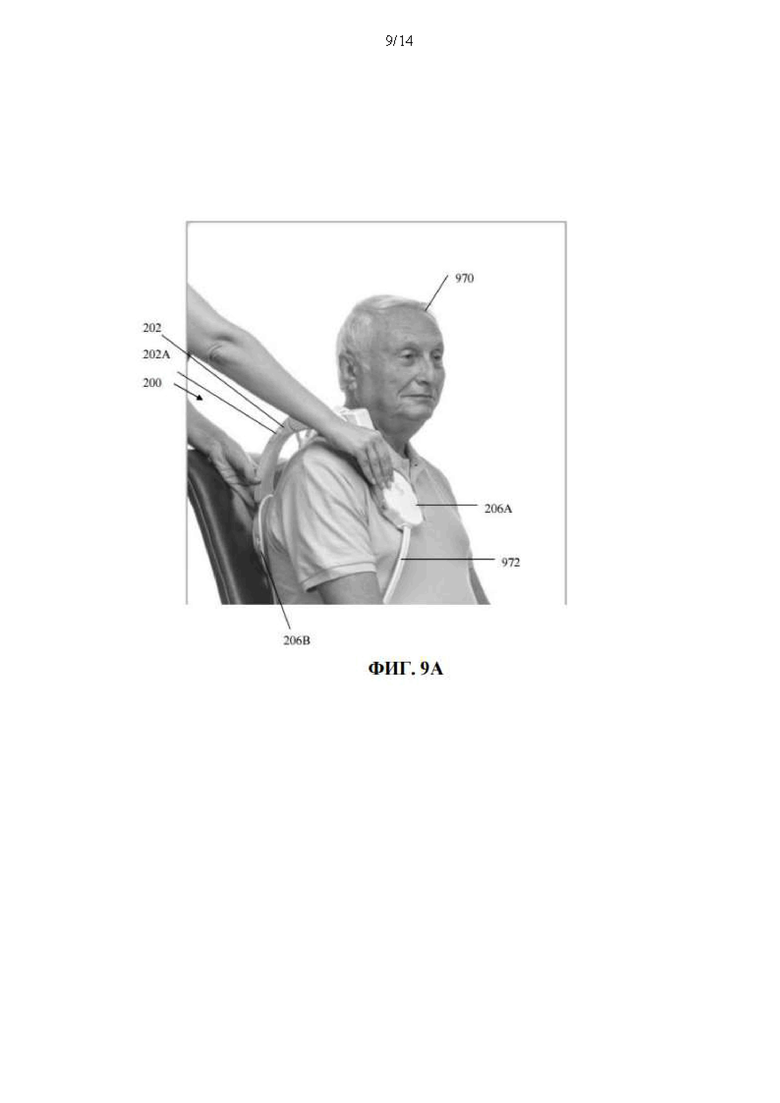
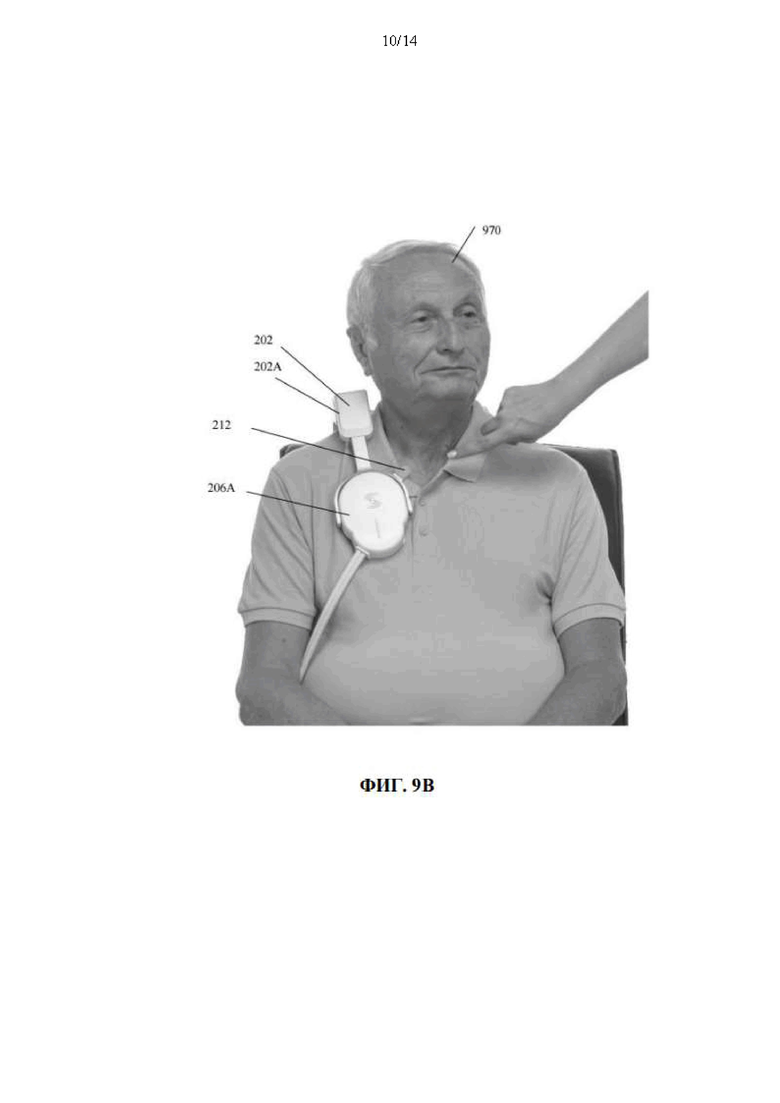
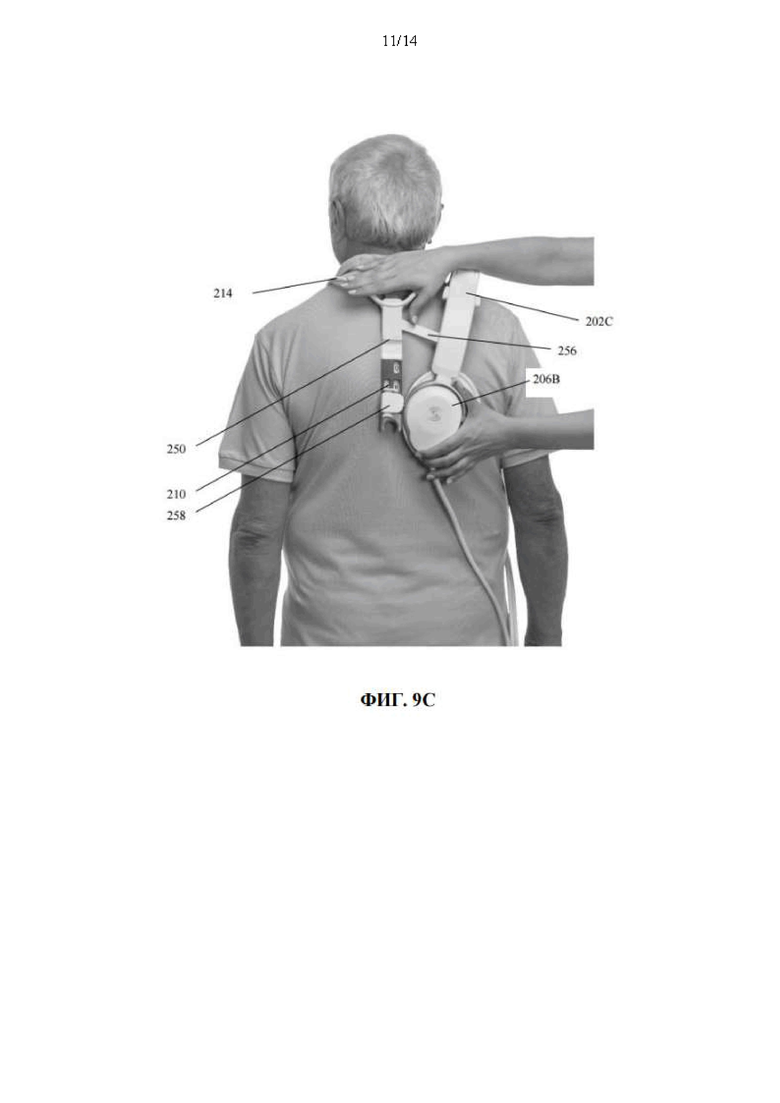
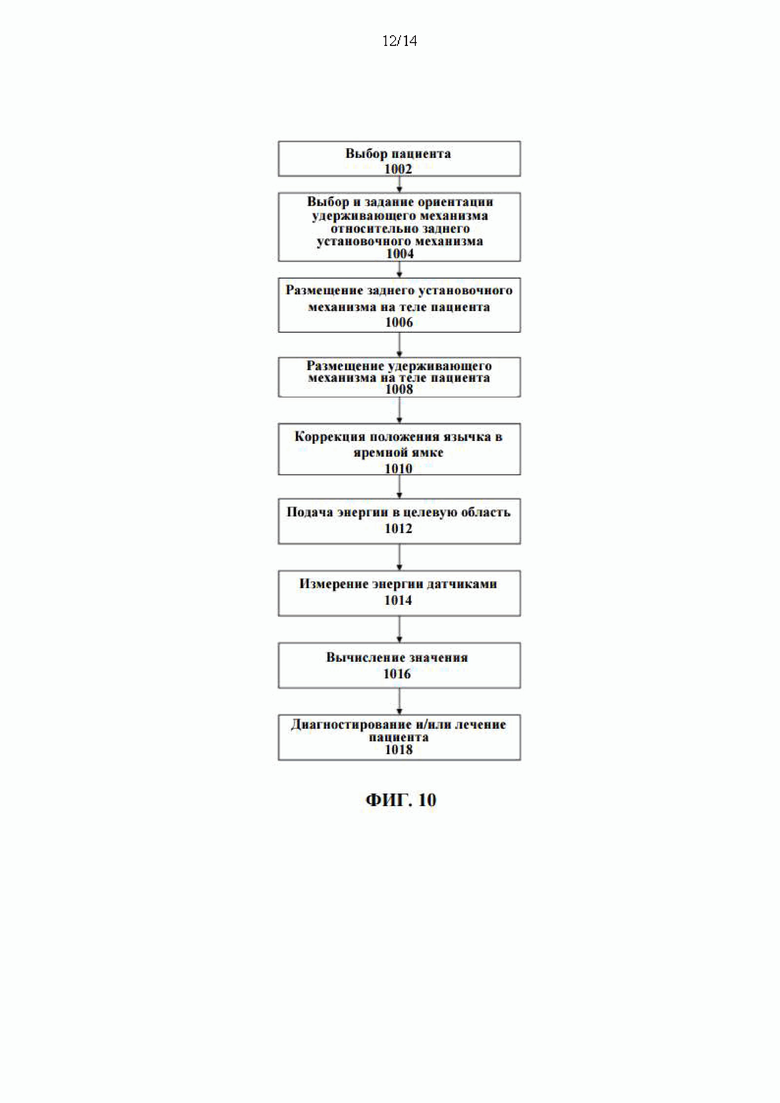
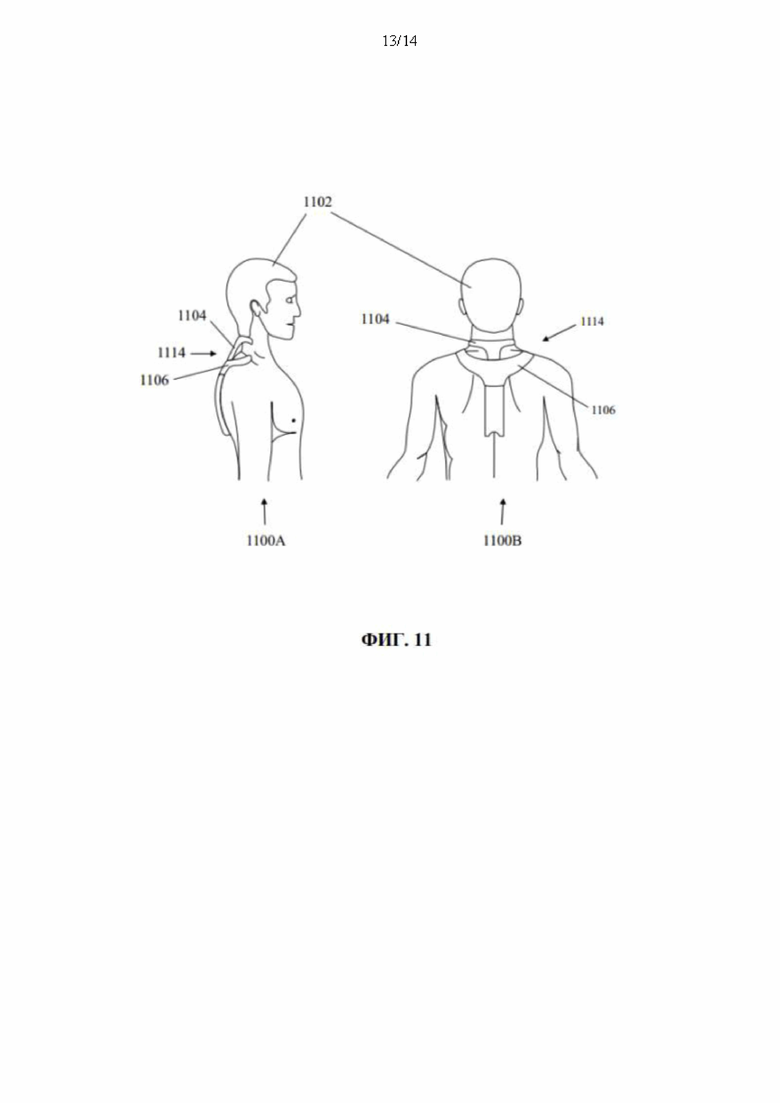
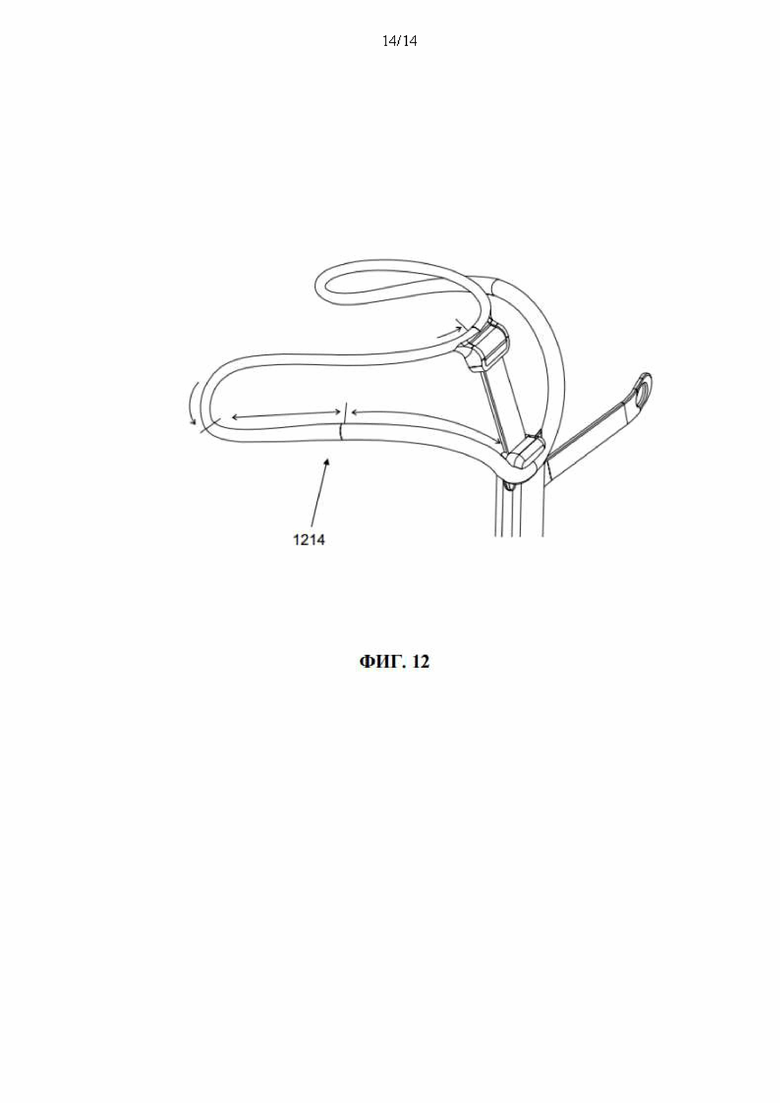
Группа изобретений относится к медицинской технике. Устройство для установки в требуемое положение датчиков для измерения характеристик тканей тела пациента включает: передний датчик, задний датчик, задний установочный элемент, содержащий воротник, форма и размеры которого соответствуют линии плеч и основанию задней части шеи целевого пациента, и удлиненный элемент, имеющий первый конец, соединенный с воротником, и второй конец с маркером местоположения, выполненный с возможностью обеспечения соответствия позвонку целевого пациента. Удлиненный элемент выполнен с возможностью расположения во время использования параллельно длинной оси позвоночника на спине целевого пациента и над ней. Передний и задний датчики выполнены с возможностью расположения на грудной клетке пациента относительно заднего установочного элемента для передачи сигналов в целевую область. Раскрыт способ установки датчиков для измерения характеристик тканей тела пациента в требуемое положение на груди целевого пациента. Технический результат состоит в обеспечении точности измерений за счет выравнивания датчиков. 2 н. и 19 з.п. ф-лы, 12 ил.
1. Устройство для установки в требуемое положение датчиков для измерения характеристик тканей тела пациента, характеризующееся тем, что включает:
передний датчик,
задний датчик,
задний установочный элемент, содержащий:
(i) воротник, форма и размеры которого соответствуют линии плеч и основанию задней части шеи целевого пациента; и
(ii) удлиненный элемент, имеющий первый конец, соединенный с воротником, и второй конец с маркером местоположения, выполненный с возможностью обеспечения соответствия позвонку целевого пациента;
при этом удлиненный элемент выполнен с возможностью расположения во время использования параллельно длинной оси позвоночника на спине целевого пациента и над ней, а упомянутые передний и задний датчики – с возможностью расположения на грудной клетке пациента относительно заднего установочного элемента для передачи сигналов в целевую область.
2. Устройство по п. 1, характеризующееся тем, что содержит удерживающий механизм, выполненный с возможностью соединения с задним установочным механизмом и включающий:
(i) дугообразный сегмент, охватывающий плечо целевого пациента;
(ii) удлиненный передний сегмент, соединенный с передним датчиком, который контактирует с грудью целевого пациента; и
(iii) удлиненный задний сегмент, соединенный с одним задним датчиком, который контактирует со спиной целевого пациента;
при этом удерживающий механизм расположен во время работы относительно установленного в требуемое положение заднего установочного элемента, а упомянутые передний и задний датчики размещены с помощью удерживающего механизма на грудной клетке пациента с возможностью передачи сигналов в целевую область.
3. Устройство по п. 2, характеризующееся тем, что содержит энергонезависимую память для хранения кода, который при его исполнении аппаратным процессором вычислительного устройства инициирует выполнение следующих операций: управляемой активации заднего датчика и переднего датчика; приема выходных данных с заднего датчика и с переднего датчика; и вычисление объема жидкости в целевой ткани целевого пациента на основании выходных данных заднего датчика и переднего датчика.
4. Устройство по п. 1, характеризующееся тем, что задний установочный элемент имеет Y-образную форму; при этом воротник имеет такую форму, которая соответствует форме коротких верхних плеч буквы Y, а удлиненный элемент заднего установочного элемента имеет такую форму, которая соответствует форме длинного плеча буквы Y.
5. Устройство по п. 2, характеризующееся тем, что удерживающий механизм имеет форму буквы U, первое плечо которой короче второго плеча, при этом передний сегмент удерживающего механизма соответствует первому плечу буквы U, задний сегмент удерживающего механизма соответствует второму плечу, а дугообразный сегмент удерживающего механизма соответствует изогнутому участку буквы U.
6. Устройство по п. 2, характеризующееся тем, что задний установочный элемент содержит регулировочный механизм для регулировки расстояния между удерживающим механизмом и удлиненным элементом заднего установочного элемента.
7. Устройство по п. 6, характеризующееся тем, что регулировочный механизм включает селекторы стопового положения, распределенные на удерживающем механизме по двухмерной схеме для задания расстояния между удерживающим механизмом и удлиненным элементом заднего установочного элемента.
8. Устройство по п. 7, характеризующееся тем, что каждый селектор стопового положения соответствует комбинации физических и анатомических параметров пациента.
9. Устройство по п. 6, характеризующееся тем, что регулировочный механизм выполнен с возможностью регулировки положения удерживающего механизма в двухмерной плоскости параллельно спине целевого пациента.
10. Устройство по п. 2, характеризующееся тем, что передний сегмент включает язычок с возможностью расположения во время использования у анатомического ориентира целевого пациента, а передний датчик – с возможностью расположения относительно груди в целевой области.
11. Устройство по п. 10, характеризующееся тем, что анатомический ориентир выбран из группы, включающей яремную ямку, ключицу и грудину.
12. Устройство по п. 2, характеризующееся тем, что удерживающий механизм и задний установочный элемент имеют такие размеры и форму и регулируются таким образом, что обеспечивают установку в требуемое положение переднего датчика и заднего датчика в целевой области, находящейся в пределах одного из органов, выбранного из группы, включающей: левое легкое, правое легкое, правую среднюю долю, правую верхнюю долю, правую нижнюю долю, левую верхнюю долю, левую нижнюю долю, сердце, трахею.
13. Устройство по п. 2, характеризующееся тем, что содержит
элемент позиционирования переднего датчика, соединенный с передним датчиком для коррекции ориентации переднего датчика, контактирующего с грудью целевого пациента, соответствующей целевой области, причем элемент позиционирования переднего датчика соединен с передним сегментом удерживающего механизма; и
элемент позиционирования заднего датчика, соединенный с задним датчиком для коррекции ориентации заднего датчика, контактирующего со спиной целевого пациента, соответствующей целевой области, причем элемент позиционирования заднего датчика соединен с задним сегментом удерживающего механизма.
14. Устройство по п. 2, характеризующееся тем, что удерживающий механизм включает жесткие сегменты, соединенные подпружиненными шарнирами, выполненными с возможностью коррекции расстояния между передним датчиком и задним датчиком, а также приложения усилия пружины для прижатия переднего датчика и заднего датчика к грудной клетке целевого пациента.
15. Устройство по п. 1, характеризующееся тем, что датчики выбраны из группы, включающей: электромагнитные (EM) передатчики и приемники, ультразвуковые передатчики и приемники, радиочастотные (RF) передатчики и приемники.
16. Устройство по п. 2, характеризующееся тем, что удерживающий механизм выполнен из упругого материала для увеличения расстояния между передним датчиком и задним датчиком для охвата грудной клетки и прижатия переднего датчика и заднего датчика в направлении друг к другу, при этом удерживающий механизм выполнен с возможностью прикладывать усилие во время работы к переднему датчику и заднему датчику, прижимая их к грудной клетке в положении, которое соответствует целевой области.
17. Устройство по п. 1, характеризующееся тем, что содержит датчики для вычисления расстояния между передним датчиком и задним датчиком во время работы.
18. Способ установки датчиков для измерения характеристик тканей тела пациента в требуемое положение на груди целевого пациента, характеризующийся тем, что:
используют устройство по п. 2;
размещают воротник заднего установочного элемента на линии плеч или у основания шеи целевого пациента;
размещают маркер местоположения удлиненного элемента заднего установочного элемента на заданном анатомическом ориентире позвоночника целевого пациента;
размещают дугообразный сегмент удерживающего механизма поверх плеча целевого пациента таким образом, чтобы передний датчик и задний датчик, соединенные с удерживающим механизмом, были установлены на грудной клетке; и
регулируют положение язычка, соединенного с удлиненным передним сегментом удерживающего механизма, в заданной анатомической области на груди пациента.
19. Способ по п. 18, характеризующийся тем, что передают EM-энергию между передним датчиком и задним датчиком на груди целевого пациента, которая проходит через целевую область пациента; измеряют EM-энергию, передаваемую через целевую область; и вычисляют объем жидкости в целевой области.
20. Способ по п. 18, характеризующийся тем, что выбирают стоповое положение удерживающего механизма относительно удлиненного элемента заднего установочного элемента на основании одного из стоповых положений, соответствующих сочетанию, по меньшей мере, анатомических и физических размеров грудной клетки целевого пациента.
21. Способ по п. 20, характеризующийся тем, что соединяют удерживающий механизм с задним установочным элементом с помощью соединителя, который заходит в один из селекторов стопового положения.
| Реакционный барабан для "сухого" ацетиленового генератора | 1952 |
|
SU101914A1 |
| US 2015031978 A1, 29.01.2015 | |||
| US 2008200792 A1, 21.08.2008 | |||
| US 2017281462 A1, 05.10.2017 | |||
| US 2008077341 A, 24.07.2008 | |||
| US 2018000415 A1, 04.01.2018 | |||
| WO 2014097297 A1, 26.06.2014 | |||
| EP 1486169 A3, 15.12.2004. | |||

