Предлагаемое изобретение относится к области локации и навигации, в частности к способам определения координат, и может быть использовано для определения местоположения сканирующих РЛС при ведении радиотехнической разведки (РТР) с нескольких разнесенных носителей.
Обычным и наиболее распространенным в настоящее время способом местоопределения РЛС при ведении РТР с нескольких пространственно разнесенных носителей является пеленгационный метод, при котором местоположение РЛС определяется как точка (область) пересечения пеленгов, взятых на нее из точек расположения носителей.
Факторами, ограничивающими возможности реализации этого метода, особенно при необходимости ведения разведки в широком диапазоне волн, являются трудности создания и размещения на носителях широкодиапазонных пеленгаторных устройств, в частности антенных систем. В этом отношении более простыми в реализации являются временные методы местоопределения, основанные на измерении и сравнении времени приема сигнала на нескольких носителях или приемных пунктах (ПП).
Известен временной гиперболический (разностно-дальномерный) метод определения координат (например, А.И. Евтеев "Возможности применения гиперболического временного метода для местоопределения разведуемых источников радиоизлучения". Труды ЦНИИ-30 МО, вып. 57 (127), 1963 г.), при котором местоположение излучателя определяется как точка пересечения двух гипербол; параметры этих гипербол определяют в результате измерения разностей моментов времени приема на трех разнесенных приемных пунктах одноименной фазы модуляции сигнала. Используемое в этом методе явление разновременности приема одноименной фазы модуляции (например, данного импульса) обусловлено различным (в общем случае) удалением ПП от разведуемого излучателя (РЛС) и конечностью скорости распространения сигнала. Условием применимости этого метода является нахождение всех ПП в зоне одновременного облучения разведуемого излучателя, т.е. возможность приема каждого излученного импульса на всех ПП. При разведке РЛС с остронаправленными антеннами, когда одновременный прием сигналов по основному лепестку диаграммы направленности (ДН) РЛС на всех ПП не имеет места, одновременный прием сигналов на ПП может быть осуществлен за счет приема бокового излучения разведываемой РЛС. Однако при ведении разведки на больших дальностях, в частности при воздушной РТР, и тем более при разведке за пределами радиогоризонта, прием бокового излучения разведуемых РЛС не может быть обеспечен даже при использовании высокочувствительных приемных устройств и прием сигналов на разных ПП будет осуществляться поочередно - в порядке облучения их основным лепестком ДН РЛС. В этих условиях гиперболический временной способ местоопределения неприменим. В частном случае работы разведуемой РЛС в режиме кругового обзора с постоянной скоростью вращения определение ее координат можно произвести путем нескольких измерений интервалов времени между последовательными облучениями одного ПП и между облучениями разных ПП, в результате чего определяется период обзора антенны РЛС и углы между направлениями на разные ПП из точки расположения РЛС. По этим данным определяют местоположение РЛС как точку пересечения дуг двух окружностей, являющихся геометрическими местами вершин определенных ранее углов, опирающихся на расстояния (отрезки прямых) между ПП (О.Н. Леонтьевский и др. Радиопротиводействие и разведка радиотехнических средств. Часть 1. Основы радиотехнической разведки. Л. ЛКВВИА им. А.Ф. Можайского, 1961, стр. 157).
Этот метод позволяет определить координаты РЛС в условиях, когда прием бокового излучения не может быть обеспечен, в частности при разведке за пределами радиогоризонта, не требует применения громоздких и сложных в размещении пеленгаторных устройств и в связи с этим может быть реализован в широком диапазоне волн. Однако он может быть применен лишь при разведке РЛС кругового обзора; координаты РЛС, работающих в режиме секторного обзора таким методом не могут быть определены. Это является существенным недостатком данного метода, так как к РЛС секторного обзора относится ряд современных РЛС, использующих фазированные антенные решетки (например, AN/SPS-32, AN/SPS-33 и др.); режим секторного обзора типичен также для бортовых панорамных РЛС и радиолокационных бомбо-прицелов. Другим недостатком изложенного метода (принятого за прототип) является необходимость длительного приема сигналов данной РЛС - в течение нескольких периодов обзора, что снижает быстродействие и пропускную способность системы разведки и ограничивает возможность разведки РЛС с кратковременным излучением (работающих в паузном режиме).
Целью предложения является устранение этих недостатков, т.е. повышение быстродействия и обеспечение возможности определения координат (и угловой скорости) РЛС, работающих в режиме секторного обзора.
Указанная цель достигается путем применение следующей процедуры приема и обработки сигналов. На нескольких (не менее четырех) ПП, последовательно облучаемых основным лепестком разведуемой РЛС при ее сканировании, определяют времена облучения и фиксируют моменты, соответствующие серединам облучений (огибающих или пачек принимаемых сигналов); при этом формируют и запоминают сигналы, пропорциональные интервалам времени между этими моментами. Запомненные сигналы сравнивают и вырабатывают сигналы, пропорциональные двум независимым отношениям трех запомненных сигналов. Полученная таким образом совокупность сигналов при данном (известном), взаимном расположении ПП однозначно (в общем случае) определяет расположение излучателя относительно ПП. Координаты излучателя в процессе разведки (с учетом текущего изменения взаимного расположения носителей, т.е. ПП) определяют в результате совместной обработки (аналоговой или цифровой - в зависимости от вида представления соответствующих сигналов) запомненных сигналов (взаимно транслируемых между ПП по линии обмена информацией) и данных о текущем взаимном расположении носителей. Процесс определения координат по этим данным может быть представлен в виде (при аналоговой обработке) отыскания общей точки пучка четырех прямых, проходящих через разные ПП и развернутых друг относительно друга на углы, соотношения между которыми задаются совокупностью величин, выработанных, как указано выше, и запомненных сигналов. При дискретном (цифровом) представлении сигналов определение (вычисления) значений углов разворота этих прямых можно произвести итерационным путем. Используя полученные таким образом угловые расстояния между ПП и сформированные ранее и запомненные сигналы, пропорциональные интервалам времени между облучениями этих ПП, определяют угловую скорость излучателя.
Предлагаемая совокупность действий по обработке сигналов, принимаемых на четырех или более ПП, позволяет определить координаты и угловую скорость сканирующих излучателей по каждому их циклу обзора, что повышает быстродействие и темп выдачи информации о текущем их расположении и обеспечивает возможность разведки РЛС, работающих в режиме секторного обзора, а также в паузном режиме с однократным обзором пространства. Расчетная проверка и моделирование предлагаемого процесса обработки информации, произведенные для случая представления сигналов в цифровом виде, подтвердили осуществимость предлагаемого способа и повышенную его эффективность по сравнению с известными, особенно для случая, когда расстояния между ПП не слишком малы по отношению к дальности до РЛС (не менее 15÷18%).
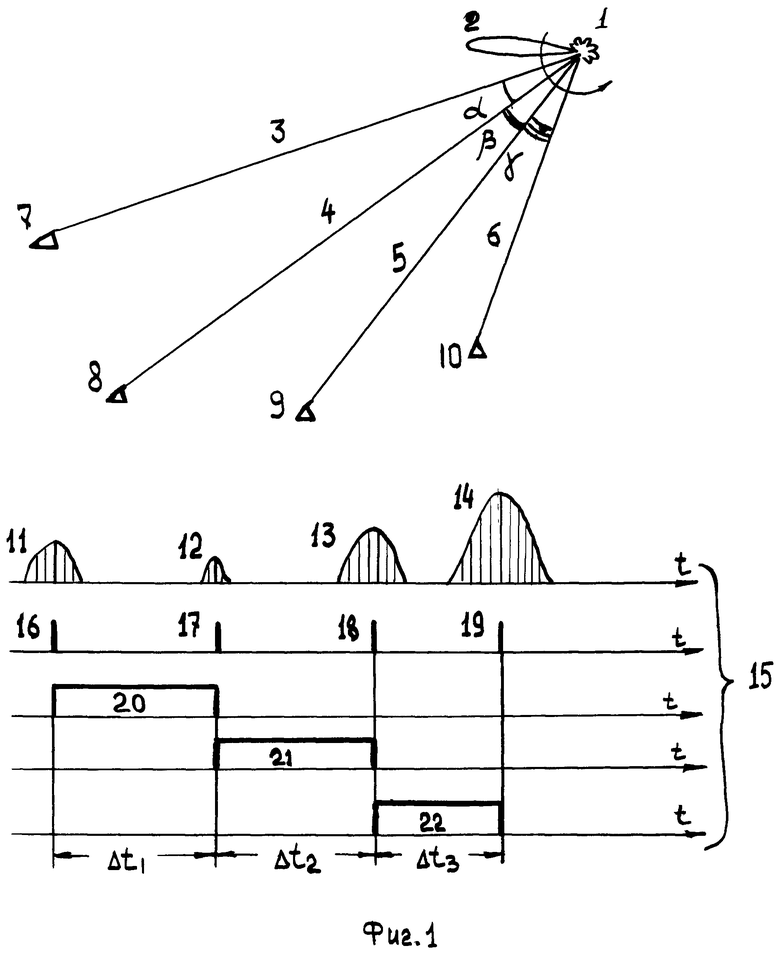
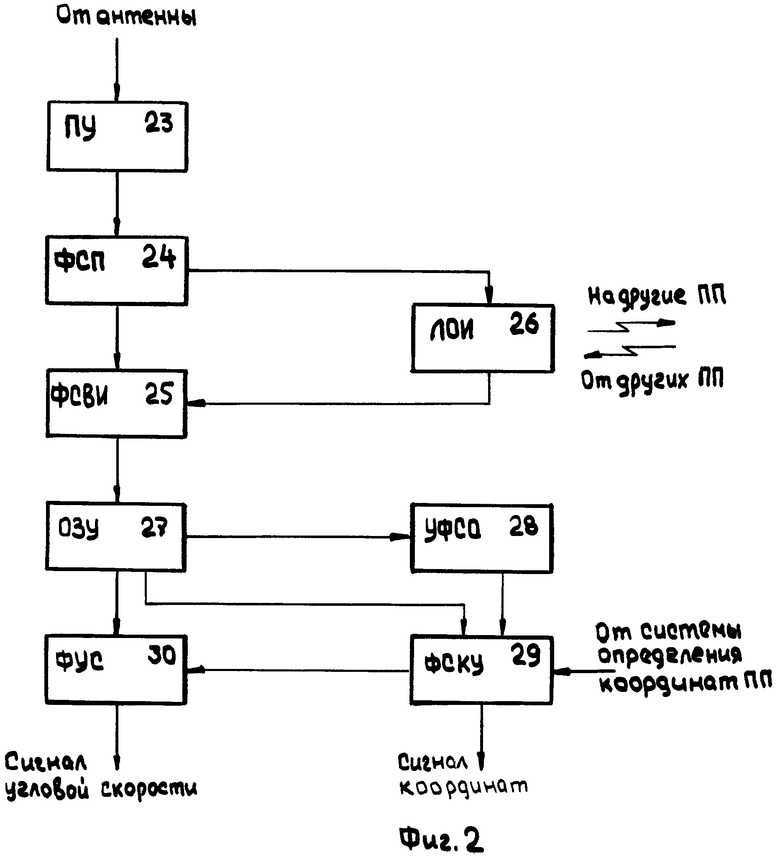
Сущность предлагаемого способа поясняется приведенным ниже описанием процесса обработки и приложенными чертежами. На фиг. 1 схематически изображены пространственные и временные соотношения, поясняющие предлагаемый способ, на фиг. 2 приведена возможная блок-схема аппаратуры одного ПП, реализующая процесс обработки сигналов и определения координат и угловой скорости согласно предложению.
На фиг. 1 показано взаимное расположение сканирующего направленного излучателя 1, основной лепесток ДН которого 2 в процессе обзора пространства последовательно проходит направления 3, 4, 5, 6 на разнесенные ПП 7, 8, 9, 10. Сигналы (пачки) 11, 12, 13, 14, принятые на этих ПП в результате последовательного облучения их основным лепестком ДН 2, расположены на оси времени t (15) последовательно и имеют форму сгибающей основного лепестка ДН разведуемого источника 1, ограниченной снизу по уровню, определяемому чувствительностью (приемным потенциалом) данного ПП и расстоянием от него до источника излучения. Моменты времени 16, 17, 18, 19, соответствующие серединам длительностей принятых сигналов 11, 12, 13, 14, разнесены на временные интервалы 20 (Δt1), 21 (Δt2) и 22 (Δt3). Укрупненная блок-схема основных устройств обработки сигнала на одном ПП (фиг. 2) включает в себя приемное устройство 23 (ПУ), формирователь сигнала середины пачки 24 (ФСП), формирователь сигналов временных интервалов 25 (ФСВИ), ко входам которого подключены выходы формирователя середины пачки 24 и линии обмена информацией 26 (ЛОИ), оперативное запоминающее устройство 27 (ОЗУ), устройство сравнения и формирования сигналов отношений 28 (УФСО) и формирователи сигналов координат и углов 29 (ФСКУ) и угловой скорости 30 (ФУС).
Обработка принимаемых сигналов и формирование данных о координатах и угловой скорости разведуемого источника излучения происходит в следующем порядке. Принятый приемным устройством 23 сигнал с огибающей пачки вида 11÷14 подают на вход ФСП 24, где формируют сигнал, соответствующий середине 16÷19 принятой на данном ПП пачки. Выработанный в ФСП сигнал подают на формирователь сигналов временных интервалов 25 и, одновременно, на расположенные на данном ПП устройства линии обмена информацией 26 для передачи на другие ПП. На другой вход формирователя 25 (ФСВУ) от ЛОИ 26 подают сигналы середины пачек, сформированные из принимаемых сигналов на других ПП, вырабатывают сигналы, пропорциональные временным интервалам 20, 21 и 22 между моментами (16, 17, 18, 19) приема середин пачек на разных ПП. Эти три сигнала (вырабатываемые последовательно во времени) подают в ОЗУ 27 для запоминания. Запомненные сигналы из ОЗУ 27 вводят в устройство сравнения и формирования сигналов отношений 28 (УФСО), где производят попарное сравнение сигналов и вырабатывают два сигнала, пропорциональные отношениям запомненных сигналов (например, отношениям длительностей сигналов 20 к 21 и 22 к 21, т.е. 

При дискретном (цифровом) виде входных сигналов выработку данных об углах и координатах в ФСКУ производят с помощью одного (общего) или нескольких специализированных вычислителей, реализующих соответствующие формульные зависимости между входными и искомыми величинами. Так, например, для частного случая расположения всех ПП на одной прямой углы между отрезками прямых 3, 4, 5, 6 определяют из уравнений
α=aβ

γ=bβ
где α, β, γ - искомые углы между отрезками прямых 3-4, 4-5 и 5-6 соответственно;


А, В, С - расстояния между соседними ПП, получаемые от системы определения координат носителей или ПП
Результирующее уравнение решают методом итераций.
Прямоугольные координаты излучателя в системе отсчета, где ось X совпадает с линией расположения ПП, а начало координат совмещено с крайним ПП, определяют, например, по формулам
где 
Приведенные формулы не являются единственно возможными и должны лишь иллюстрировать один из осуществимых вариантов процедуры обработки и формирования сигналов углов и координат в ФСКУ при оперировании с сигналами в дискретном (цифровом) виде. Сигнал, пропорциональный угловой скорости излучателя, вырабатывают в формирователе ФУС 30, куда подают из ОЗУ 27 выработанные ранее в ФСВИ 25 и запомненные сигналы длительностей временных интервалов, а из ФСКУ 29 - выработанные в нем сигналы углов. Сигнал угловой скорости формируют как пропорциональный отношению сигнала угла между направлениями из точки расположения излучателя 1 на какие-либо ПП к сигналу временного интервала между моментами облучения этих ПП.
Варианты реализации предлагаемого способа с использованием аналоговой обработки сигналов могут оказаться более простыми при фиксированном положении ПП (например, в сухопутных средствах разведки) и ведении разведки в целях оценки обстановки, т.е. при относительно невысоких требованиях к точности определения координат излучателей. При размещении ПП на подвижных и маневрирующих носителях - кораблях и летательных аппаратах, более предпочтительными представляются варианты реализации данного способа с использованием дискретных средств формирования и обработки сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕВИАЦИИ ЧАСТОТЫ | 1977 |
|
SU1840975A1 |
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ БЕЗ ИЗМЕРЕНИЯ ПЕЛЕНГА | 2018 |
|
RU2704029C1 |
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2742581C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЧАСТОТНОЙ НАСТРОЙКОЙ ПРИЕМНИКА | 1989 |
|
SU1841036A1 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕГО ОПТИЧЕСКОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТЯЩЕГО В СТРАТОСФЕРЕ ИЛИ НА БОЛЬШОЙ ВЫСОТЕ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО КРИТЕРИЯМ КОНДЕНСАЦИОННОГО СЛЕДА ЕГО СИЛОВОЙ УСТАНОВКИ В АТМОСФЕРЕ | 2012 |
|
RU2536769C2 |
| СПОСОБ КОНТРОЛЯ ВОЗДУШНОГО ПРОСТРАНСТВА, ОБЛУЧАЕМОГО ВНЕШНИМИ ИСТОЧНИКАМИ ИЗЛУЧЕНИЯ, И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2285939C1 |
| Способ определения местоположения работающей РЛС пассивным многолучевым пеленгатором | 2019 |
|
RU2741333C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАБОТАЮЩЕЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2010 |
|
RU2457505C2 |
| ПЕРЕНОСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ РАЗВЕДКИ НАЗЕМНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ С ЦИФРОВОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 2023 |
|
RU2832238C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2020 |
|
RU2758832C1 |
Изобретение относится к области локации и навигации. Достигаемый технический результат - повышение быстродействия и обеспечение возможности определения координат и угловой скорости РЛС, работающих в режиме секторного обзора. Указанный результат достигается за счет того, что устройство содержит три пространственно-разнесенных приемных пункта, подключенные к линии обмена информацией, формирователь сигналов временных интервалов через блок оперативной памяти соединенный с формирователем сигналов координат и углов, к которому подключены датчики координат приемных пунктов, содержит также четвертый приемный пункт, формирователь сигнала угловой скорости (ФСУС) и формирователь сигнала отношений (ФСО). Причем четвертый приемный пункт подключен к линии обмена информацией, а блок оперативной памяти параллельно через ФСУС и ФСО подключен к формирователю сигнала координат и углов. 1 з.п. ф-лы, 2 ил.
1. Устройство определения координат и угловой скорости обзора направленных сканирующих излучателей, содержащее три пространственно-разнесенных приемных пункта, подключенные к линии обмена информацией, формирователь сигналов временных интервалов, через блок оперативной памяти соединенный с формирователем сигнала координат и углов, к которому подключены датчики координат приемных пунктов, отличающееся тем, что, с целью определения координат и угловой скорости излучателей, работающих в режиме секторного обзора, введены четвертый приемный пункт, формирователь сигнала угловой скорости и формирователь сигнала отношений, причем четвертый приемный пункт подключен к линии обмена информацией, а блок оперативной памяти параллельно через формирователь сигнала угловой скорости и формирователь сигнала отношений подключен к формирователю сигнала координат и углов.
2. Устройство по п.1, отличающееся тем, что, с целью повышения точности определения координат и угловой скорости излучателей, между линией обмена информацией и формирователем сигналов временных интервалов включен формирователь сигнала середины пачки облучения сканирующего излучателя.

