Изобретение относится к области летательных аппаратов, а именно к конструкциям малоразмерных беспилотных летательных аппаратов (БПЛА) вертолетного типа, предназначенных для тушения пожаров преимущественно в высотных зданиях или других труднодоступных местах.
Часто при тушении пожаров на верхних этажах высотных зданий или в других труднодоступных местах (например, в промышленных зонах, куда подъезд спец.техники невозможен) традиционные методы тушения огня с подачей воды или других огнетушащих жидкостей по шлангам не работают. Специальные краны и выдвижные лестницы помогают доставлять огнетушащую жидкость лишь до определенной степени, а высотность зданий с годами все увеличивается.
Известны многоствольные системы с огнегасящими снарядами, которые могут быть расположены на земле, автомобиле или вертолете. В одной из таких систем [Патент US 6860187 B2, МПК F41F 1/08, опубл. 01.03.2005] каждый ствол содержит по нескольку снарядов, запускаемых в очаг возгорания последовательно. Такие системы обладают большой производительностью.
Собственно огнегасящий снаряд, например, согласно [Патент US 7896092 B2, МПК A62C 8/00, опубл. 01.03.2011], может представлять собой баллон обтекаемой ракетообразной формы, заполненный в основном огнегасящим веществом. В носовой части снаряда расположен активатор, вырабатывающий электрический импульс при столкновении с целью. Этот импульс воздействует на детонатор, расположенный внутри снаряда в хвостовой части. Детонатор подрывает пороховой заряд, что приводит к мгновенному распылению огнегасящего вещества.
По сравнению с запуском с земли, способы и устройства доставки огнегасящих снарядов с беспилотных летательных аппаратов обладают определенными преимуществами: они точнее, позволяют на любой высоте и с любой стороны подойти к очагу возгорания и после возможного обследования прицельно метать огнегасящие снаряды.
В подавляющем большинстве случаев для тушения пожаров в высотных зданиях более удобны небольшие БПЛА вертолетного типа - вертолеты или мультикоптеры, которые благодаря их относительной компактности можно легко и быстро доставить к месту пожара и которые обладают способностью зависать в заданной точке.
Известно много различных устройств и систем для тушения пожаров на базе малых БПЛА вертолетного типа. Например, известно довольно простое устройство [Патент KR 102271938 B1, МПК B64C 39/024, опубл. 02.07.2021] на базе мультикоптера, в нижней центральной части которого расположено грузосбрасывающее устройство, внутри которого закреплен огнегасящий снаряд (бомба). После зависания над очагом возгорания мультикоптер получает по радиоканалу команду на сброс. Грузосбрасывающее устройство освобождает бомбу, которая после попадания в очаг возгорания, разрывается и распыляет огнегасящее вещество. Данное техническое решение ввиду своей простоты имеет очень низкую стоимость реализации. Однако оно малопроизводительно и имеет существенное ограничение в применении, поскольку огнегасящая бомба может быть сброшена только вертикально сверху.
Другой известное техническое решение с пожарным БПЛА вертолетного типа [Патент CN 107161328 B, МПК B64D 1/04, опубл. 16.10.2020] способно обеспечить гораздо большую производительность, поскольку здесь БПЛА несет сразу несколько огнегасящих бомб, которые подвешены с помощью электроуправляемых замков в нижней части рамы (фюзеляжа) и распределены таким образом, что при полной загрузке их подвеска не изменяет положение центра тяжести аппарата в горизонтальной плоскости. Прицеливание и контроль результата осуществляется с помощью видеокамеры, направленной вниз. Электроуправляемые замки срабатывают на отцеп бомб по радиокомандам с земли. Как и в предыдущем примере, здесь возможен только вертикальное перемещение бомб. После сброса первой группы бомб возможна коррекция положения БПЛА. Однако сброс должен производиться только по определенным правилам (группами по 2-3 бомбы в определенной последовательности), а именно так, чтобы не происходило смещения центра тяжести аппарата в горизонтальной плоскости. В противном случае изменение положения центра тяжести будет приводить к чрезмерному расходу энергии бортового источника питания, т.к. система автоматической стабилизации положения аппарата будет компенсировать смещение центра тяжести за счет усиленной работы отдельных винтомоторных групп. Следовательно, произвольный запуск снарядов по одному в такой системе невозможен или крайне нежелателен.
Наиболее близким по технической сущности к предлагаемому изобретению является БПЛА вертолетного типа [Патент CN 212332970 U, МПК B64D 1/06, опубл. 12.01.2021], который кроме силовой установки с одной или несколькими винтомоторными группами, имеет на борту несколько направленных вперед горизонтально расположенных стволов с огнегасящими снарядами и электроуправляемыми запускающими устройствами, контроллер управления пуском снарядов, видеотехнический модуль, полетный контроллер и модуль приема-передачи данных.
Вход контроллера управления пуском снарядов связан с видеотехническим модулем, а его выходы - с электроуправляемыми запускающими устройствами. Видеотехнический модуль и полетный контроллер связаны с модулем приема-передачи данных, посредством которого осуществляется обмен информацией с наземной станцией управления. По радиокомандам с земли посредством полетного контроллера, который управляет перемещением и пространственным положением аппарата, БПЛА подводят близко к очагу возгорания. При этом все стволы со снарядами направлены в сторону очага возгорания. Туда же направлены объективы видеотехнического модуля, включающего в себя камеры видимого и инфракрасного участков спектра, а также дальномер. Видеотехнический модуль передает информацию в контроллер управления пуском снарядов, где видеоинформация и сигналы дальности до объекта обрабатываются, вычисляются координаты центра очага возгорания и такое положение этого центра в кадре, при котором необходимо производить пуск снарядов (с учетом траектории движения снаряда из конкретного ствола). Как только центр очага попадает в рассчитанный сегмент кадра, контроллер управления пуском снарядов вырабатывает последовательные сигналы запуска, поступающие на соответствующие электроуправляемые запускающие устройства. Видеоинформация через модуль приема-передачи данных также поступает на наземную станцию управления оператору, который может управлять процессом в ручном режиме. Выпущенные снаряды разрываются в очаге возгорания, распыляя огнегасящее вещество. Таким образом, данный БПЛА позволяет осуществлять прицельный запуск огнегасящих снарядов в горизонтальном направлении, что важно для тушения пожаров в высотных зданиях.
Однако рассмотренный БПЛА имеет недостаток, заключающийся в том, что при произвольном пуске снарядов после опорожнения отдельных стволов происходит смещение центра тяжести аппарата. Если рассматривать поперечное сечение БПЛА, проходящее через его центр тяжести, то до пуска снарядов центр тяжести находится на вертикальной линии симметрии. Если смещение центра тяжести происходит вверх или вниз, то это не критично. Но смещение центра тяжести влево или вправо будет приводить к более напряженному режиму работы силовой установки БПЛА, т.к. система автоматической стабилизации положения аппарата будет стремиться компенсировать смещение центра тяжести и возможный крен за счет усиленной работы отдельных винтомоторных групп (для мультикоптера) или циклического увеличения шага несущего винта (для вертолета). В результате неизбежен ускоренный разряд источника питания или ускоренный расход топлива, и как следствие, сокращение времени работы БПЛА. Таким образом, произвольный запуск снарядов по одному в такой системе, также как в предыдущем примере [CN 107161328 B], невозможен или крайне нежелателен. Учет рассмотренного эффекта особенно важен для малоразмерных БПЛА, в которых массогабаритные параметры самого БПЛА сравнимы с массогабаритными параметрами пусковой установки с огнегасящими снарядами.
Задачей данного изобретения является создание легкого БПЛА вертолетного типа для тушения пожаров в высотных зданиях, у которого пуски огнегасящих снарядов не приводят к боковым смещениям центра тяжести и, как следствие, более напряженному режиму работы силовой установки и сокращению времени работы БПЛА.
Технический результат заключается в более стабильной работе БПЛА при пуске огнегасящих снарядов, более экономному расходованию энергии силовой установки и увеличенному времени работы БПЛА. Технический результат достигается за счет применения специального устройства, позволяющего предотвратить боковые смещения центра тяжести БПЛА.
Задача решается тем, что в известном БПЛА вертолетного типа с силовой установкой на базе одной или нескольких винтомоторных групп и имеющем на борту несколько направленных вперед горизонтально расположенных стволов с огнегасящими снарядами и электроуправляемыми запускающими устройствами, контакты которых соединены с соответствующими выходами контроллера управления пуском снарядов, а также имеющем на борту видеотехнический модуль, полетный контроллер и модуль приема-передачи данных, соединенные так, что выход видеотехнического модуля связан со входом контроллера управления пуском снарядов и модулем приема-передачи данных, а полетный контроллер связан соответствующими информационными шинами с модулем приема-передачи данных, контроллером управления пуском снарядов и силовой установкой, внесены следующие изменения: стволы с огнегасящими снарядами в количестве четырех или пяти, или девяти, или двенадцати помещены в единый модуль запуска с внешним корпусом цилиндрической формы таким образом, что для поперечного сечения этого модуля соблюдается вращательная осевая симметрия 4-го порядка1 (1 [https://dic.academic.ru/dic.nsf/ruwiki/667390]. Осевая симметрия n-го порядка - симметричность относительно поворотов на угол 360°/n вокруг какой-либо оси. Т.е. фигура, обладающая осевой вращательной симметрией 4-го порядка, при повороте на 90° относительно оси вращения, переходит сама в себя.) относительно продольной оси корпуса, центры поперечных сечений снарядов лежат на прямых, которые проходят через центр поперечного сечения корпуса и углы между которыми кратны 45°, корпус модуля запуска механически связан с сервоприводом, управляющий вход которого связан с соответствующим выходом контроллера управления пуском снарядов, который выполнен с возможностью формирования сигналов запуска отдельных снарядов согласованно с сигналами поворота корпуса модуля запуска вокруг оси симметрии на ±90° с дискретностью 45°.
Сущность изобретения поясняется следующими иллюстрациями. На фиг. 1 показана структурная схема летательного аппарата. На фиг. 2 показан чертеж аппарата с детальным изображением модуля запуска огнегасящих снарядов. На фиг. 3 показан пример поперечного сечения модуля запуска для девяти огнегасящих снарядов с указанием последовательности их запуска, а на фиг. 4 - схема последовательного опорожнения стволов для этого модуля. На фиг. 5 показаны поперечные сечения модуля запуска для альтернативных вариантов расположения снарядов.
На иллюстрациях цифрами обозначены: 1 - наземная станция управления; 2 - модуль приема-передачи данных; 3 - полетный контроллер; 4 - силовая установка; 5 - видеотехнический модуль, включающий в себя видеокамеру 6 и дальномер 7; 8 - контроллер управления пуском снарядов; 9 - модуль запуска, включающий в себя огнегасящие снаряды 10, расположенные в соответствующих стволах 11, в тыльных частях которых расположены электроуправляемые запускающие устройства 12; 13 - сервопривод; 14 - объект пожаротушения; 15 - источник возгорания; 16 - рама беспилотного летательного аппарата; 17 - опорные стойки; 18 - винтомоторные группы в составе силовой установки; 19 - держатель модуля запуска; 20 - подшипники; 21 - гибкий кабель с проводами, связанными с электроуправляемыми запускающими устройствами.
Элементы 2-13 по фиг. 1 расположены непосредственно на борту летательного аппарата. На фиг. 2 они имеют те же цифровые обозначения.
Наземная станция управления 1 связана радиоканалом с модулем приема-передачи данных 2, который связан информационными шинами с полетным контроллером 3, видеотехническим модулем 5 и контроллером управления пуском снарядов 8. Полетный контроллер 3 отдельными информационными шинами связан также непосредственно с контроллером управления пуском снарядов 8 и силовой установкой 4, включающей в себя одну или несколько винтомоторных групп 18 (на чертеже фиг. 2 показан типичный пример с четырьмя винтомоторными группами). Аккумуляторная батарея или другой источник энергии, необходимый для работы силовой установки, на фиг. 2 для упрощения чертежа не показан. Он может быть расположен, например, над рамой 16 так, чтобы не нарушать центровку БПЛА. Контроллер управления пуском снарядов 8 связан также специальной управляющей линией с сервоприводом 13, который механически связан с цилиндрическим модулем запуска 9 и может сообщать ему вращательное движение вокруг оси корпуса модуля. В корпусе модуля запуска 9 размещены несколько направленных вперед горизонтально расположенных стволов 11 с огнегасящими снарядами 10 и электроуправляемыми запускающими устройствами 12, контакты которых соединены гибкими проводами с соответствующими выходами контроллера управления пуском снарядов 8. Кабель 21 с этими проводами имеет такую длину, что вращение модуля запуска 9 в пределах ±90° не приводит к натягиванию кабеля (фиг. 2). На фиг. 1 и фиг. 2 показаны примеры исполнения модуля запуска для 4-х снарядов, но их может быть и больше, например, 5, 9 или 12, причем необходимо, чтобы для поперечного сечения этого модуля соблюдалась вращательная осевая симметрия 4-го порядка относительно продольной оси его корпуса, центры поперечных сечений снарядов должны лежать на прямых, которые проходят через центр поперечного сечения корпуса и углы между которыми кратны 45°. Модуль запуска 9 прикреплен к раме летательного аппарата 16 с помощью специального держателя 19, на внутренней поверхности которого смонтированы подшипники 20 для обеспечения свободного вращения корпуса модуля запуска 9. Летательный аппарат имеет четыре опорные стойки 17, которые предотвращают касание держателя 19 с модулем запуска 9 о поверхность при нахождении аппарата на земле. Видеокамера 6 и дальномер 7 видеотехнического модуля 5 в рабочем положении направлены на объект пожаротушения 14 с источником возгорания 15.
Предложенный летательный аппарат функционирует следующим образом.
С наземной станции управления 1 оператор передает команды, которые через модуль приема-передачи данных 2 поступают в полетный контроллер 3, который управляет перемещением и пространственным положением аппарата посредством силовой установки 4, включающей в себя, в общем случае, одну или несколько винтомоторных групп 18. БПЛА подводят близко к очагу возгорания 15. При этом модуль запуска снарядов 9 ориентирован так, что все стволы 11 со снарядами 10 направлены в сторону очага возгорания. Туда же направлены объективы видеотехнического модуля 5, включающего в себя видеокамеру 6 и дальномер 7. Видеотехнический модуль 5 передает информацию в контроллер управления пуском снарядов 8, где видеоинформация и сигналы дальности до очага возгорания 15 обрабатываются, вычисляются координаты центра очага возгорания и такое положение этого центра в кадре, при котором необходимо производить пуск снарядов (с учетом траектории движения снаряда из конкретного ствола). Как только центр очага попадает в рассчитанный сегмент кадра, контроллер управления пуском снарядов 8 вырабатывает последовательные сигналы запуска, поступающие на соответствующие электроуправляемые запускающие устройства 12. Видеоинформация через модуль приема-передачи данных 2 также поступает на наземную станцию управления 1 оператору, который может управлять процессом в ручном режиме. Выпущенные в горизонтальном направлении снаряды 10 разрываются в очаге возгорания 15, распыляя огнегасящее вещество.
После опорожнения отдельных стволов, длительных смещений центра тяжести БПЛА в боковых направлениях, которые могли бы привести к нерациональной работе винтомоторных групп и перерасходу энергии, не происходит благодаря особой схеме запуска снарядов из модуля запуска 9 и последовательности поворотов его вокруг продольной оси, которые позволяют поддерживать баланс масс снарядов.
Для каждой конкретной конфигурации расположения снарядов в модуле запуска 9 имеется своя программа последовательности пуска снарядов и поворотов корпуса модуля. Эта программа хранится во внутренней памяти контроллера управления пуском снарядов 8. Повороты корпуса модуля 9 выполняются посредством сервопривода 13, управляемого от контроллера управления пуском снарядов 8.
На фиг. 3 схематично показан один пример поперечного сечения модуля запуска 9 (для конструкции с девятью снарядами) и последовательность пуска снарядов. Для того, чтобы не происходило бокового смещения центра тяжести, должна реализовываться, например, следующая последовательность функций модуля запуска 9, проиллюстрированная на фиг. 4 (темными показаны стволы со снарядами, а светлыми - пустые стволы):
1) пуск снарядов 1, 2, 3;
2) быстрый поворот против часовой стрелки на 90°;
3) пуск снарядов 4, 5;
4) быстрый поворот по часовой стрелке на 45°;
5) пуск снарядов 6, 7;
6) быстрый поворот по часовой стрелке на 90°;
7) пуск снарядов 8, 9.
Как видно на схемах фиг. 4, соблюдается баланс масс снарядов в любой фазе работы модуля запуска.
При такой последовательности запусков снаряды можно запускать по одному без боковых смещений центра тяжести. Повороты модуля запуска на 45 или 90° могут осуществляться достаточно быстро - за 0,1-0,5 с, что не приводит к существенному изменению пространственного положения БПЛА и увеличению расхода энергии.
Кабель 21 с проводами, соединяющими контроллер управления пуском снарядов 8 с электроуправляемыми запускающими устройствами 12, выполнен с таким запасом по длине, чтобы не было его натяжения при поворотах модуля запуска 9 в пределах ±90°.
Количество стволов с огнегасящими снарядами в модуле запуска 9 может быть различным. Кроме показанных на фиг. 2 и фиг. 3 вариантов для четырех и девяти снарядов могут быть и другие. Например, на фиг. 5 показаны поперечные сечения модуля запуска для вариантов с пятью и двенадцатью снарядами. Обязательное условие, которое при этом должно выполняться для поперечного сечения этого модуля - должна соблюдаться вращательная осевая симметрия 4-го порядка относительно продольной оси корпуса модуля (т.е. фигура при повороте на 90° относительно оси вращения переходит сама в себя), центры поперечных сечений снарядов должны лежать на прямых, которые проходят через центр поперечного сечения корпуса и углы между которыми кратны 45°.
Для каждой из допустимых конфигураций расположения снарядов, для предотвращения смещения центра тяжести в боковых направлениях, должна выполняться своя, подобная вышеописанной последовательность пуска снарядов 10 и поворотов корпуса модуля 9.
Элементы конструкции предлагаемого летательного аппарата могут быть реализованы на основе легких композитных материалов. Например, рама 16, опорные стойки 17, корпус и стволы модуля запуска 9, а также его держатель 19 могут быть изготовлены из углепластика.
Другие комплектующие являются стандартными: двигатели винтомоторных групп 18 - бесколлекторные электродвигатели постоянного тока с питанием от специальных драйверов (ESC); сервопривод 13 - любой сервопривод с подходящим крутящим моментом, например, CLS6036HV от компании JX Servo. Модуль приема-передачи данных 2, полетный контроллер 3, видеотехнический модуль 5 являются стандартными и широко известными в соответствующей области техники. Контроллер управления пуском снарядов 8 может быть реализован на любом недорогом восьмиразрядном микроконтроллере.
В рассмотренном аппарате устранены недостатки прототипа и других аналогов, связанные с возможными боковыми смещениями центра тяжести при поочередном пуске огнегасящих снарядов. В результате достигается более стабильная работа БПЛА в процессе пожаротушения, более экономно расходуется энергия силовой установки и увеличивается время работы БПЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И ТУШЕНИЯ ПОЖАРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2800045C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ТУШЕНИЯ ПОЖАРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2826399C2 |
| Беспилотная летательная платформа вертолётного типа с пневмомеханическим устройством для тушения пожаров | 2023 |
|
RU2814718C1 |
| СИСТЕМА И СПОСОБ ТУШЕНИЯ ПОЖАРА | 2020 |
|
RU2744324C1 |
| БЕСПИЛОТНАЯ ЛЕТАЮЩАЯ ПЛАТФОРМА ВЕРТОЛЕТНОГО ТИПА ДЛЯ ПОЖАРОТУШЕНИЯ | 2022 |
|
RU2781919C1 |
| Способ подготовки дистанционных боевых действий | 2023 |
|
RU2812501C1 |
| Беспилотный летательный аппарат вертолетного типа | 2022 |
|
RU2792460C1 |
| Малогабаритное бортовое радиоэлектронное устройство для управления пилотажно-навигационным комплексом беспилотного летательного аппарата | 2021 |
|
RU2799748C2 |
| Авиационный комплекс обнаружения и тушения очагов возгорания и способ его применения | 2017 |
|
RU2674640C1 |
| Беспилотный летательный аппарат вертолётного типа | 2022 |
|
RU2799689C1 |

Изобретение относится к области летательных аппаратов, а именно к конструкциям малоразмерных беспилотных летательных аппаратов (БПЛА) вертолетного типа, предназначенных для тушения пожаров преимущественно в высотных зданиях или других труднодоступных местах. Расположенные на борту БПЛА стволы с огнегасящими снарядами помещены в единый модуль запуска с внешним корпусом цилиндрической формы таким образом, что для поперечного сечения этого модуля соблюдается вращательная осевая симметрия 4-го порядка относительно продольной оси корпуса, центры поперечных сечений снарядов лежат на прямых, которые проходят через центр поперечного сечения корпуса и углы между которыми кратны 45°. Корпус модуля запуска с помощью сервопривода вращается в пределах ±90° с дискретностью 45° согласованно с пуском очередных снарядов, что позволяет избежать длительных боковых смещений центра тяжести БПЛА. Технический результат заключается в более стабильной работе БПЛА при пуске огнегасящих снарядов, более экономному расходованию энергии силовой установки и увеличенному времени работы БПЛА. 5 ил.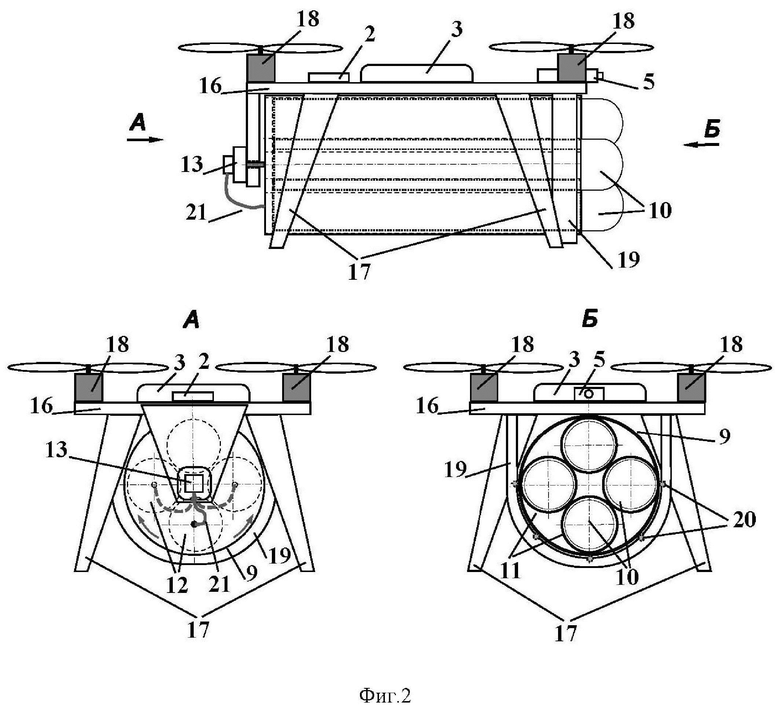
Беспилотный летательный аппарат вертолетного типа с силовой установкой на базе одной или нескольких винтомоторных групп и имеющий на борту несколько направленных вперед горизонтально расположенных стволов с огнегасящими снарядами и электроуправляемыми запускающими устройствами, контакты которых соединены с соответствующими выходами контроллера управления пуском снарядов, а также имеющий на борту видеотехнический модуль, полетный контроллер и модуль приема-передачи данных, соединенные так, что выход видеотехнического модуля связан со входом контроллера управления пуском снарядов и модулем приема-передачи данных, а полетный контроллер связан соответствующими информационными шинами с модулем приема-передачи данных, контроллером управления пуском снарядов и силовой установкой,
отличающийся тем, что стволы с огнегасящими снарядами в количестве четырех или пяти, или девяти, или двенадцати помещены в единый модуль запуска с внешним корпусом цилиндрической формы таким образом, что для поперечного сечения этого модуля соблюдается вращательная осевая симметрия 4-го порядка относительно продольной оси корпуса, центры поперечных сечений снарядов лежат на прямых, которые проходят через центр поперечного сечения корпуса и углы между которыми кратны 45°, корпус модуля запуска механически связан с сервоприводом, управляющий вход которого связан с соответствующим выходом контроллера управления пуском снарядов, который выполнен с возможностью формирования сигналов запуска отдельных снарядов согласованно с сигналами поворота корпуса модуля запуска вокруг оси симметрии на ±90° с дискретностью 45°.
| CN 212332970 U, 12.01.2021 | |||
| CN 107161328 B, 16.10.2020 | |||
| KR 102271938 B1, 02.07.2021 | |||
| CN 206968991 U, 06.02.2018 | |||
| Огнегасящий снаряд | 2020 |
|
RU2740594C1 |

