Изобретение относится к радиолокации и может использоваться при разработке и конструировании импульсно-доплеровских бортовых радиолокационных станций.
Известен автокомпенсатор помех, содержащий два приемных канала. Первый канал, основной, состоит из последовательно соединенных первой антенны, первого усилителя высокой частоты, первого смесителя, первого усилителя промежуточной частоты, первого аналого-цифрового преобразователя и первого многоканального согласованного приемника. Второй канал, компенсационный, состоит из последовательно соединенных второй антенны, второго усилителя высокой частоты, второго смесителя, второго усилителя промежуточной частоты, второго аналого-цифрового преобразователя. Устройство также содержит гетеродин, выходы которого соединены с гетеродинными входами первого и второго смесителей, и тактовый генератор, выходы которого подсоединены к тактовым входам первого и второго аналого-цифрового преобразователя (Л.И.Бялый и В.В.Подтуркин. Алгоритм адаптивной фильтрации и пеленгации источников помех в системе ФАР. Ж. «Радиотехника», 1992 г., № 7, 8).
В данном устройстве осуществляется компенсация помех, принимаемых по боковым лепесткам диаграммы направленности антенны. Компенсация осуществляется путем вычитания сигнала компенсационного канала из сигнала основного канала, причем амплитуда и фаза сигнала компенсационного канала устанавливаются такими, чтобы корреляция сигналов на выходе компенсатора помех и на выходе компенсационного канала отсутствовала. При этом достигается минимальная мощность помехового сигнала на выходе автокомпенсатора. Однако коррелятор подразумевает перемножение выходного сигнала компенсатора и сигнала компенсационного канала с последующим усреднением. Причем если условия функционирования радиолокационной станции на интервале времени, равном времени усреднения, изменяются, характеристики подавления помех значительно ухудшаются. В качестве примера можно привести бортовой радиолокатор, функционирующий в режиме «обзор». В этом режиме положение антенны остается неизменным на интервале времени накопления сигнала. При изменении положения антенны основного канала корреляционные свойства сигналов основного и компенсационного каналов изменяются, что не дает возможность осуществлять усреднение и реализовать компенсацию.
Технической задачей изобретения является обеспечение работы автокомпенсатора при времени адаптации, равном времени когерентного накопления сигнала.
Поставленная задача достигается тем, что в когерентный автокомпенсатор помех для многоканальных импульсно-доплеровских бортовых радиолокационных станций, содержащий основной приемный канал, состоящий из последовательно соединенных первой антенны, первого усилителя высокой частоты, первого смесителя, первого усилителя промежуточной частоты, первого аналого-цифрового преобразователя (АЦП) и первого многоканального согласованного приемника, компенсационный канал, состоящий из последовательно соединенных второй антенны, второго усилителя высокой частоты, второго смесителя, второго усилителя промежуточной частоты и второго АЦП, гетеродин, выходы которого соединены с гетеродинными входами первого и второго смесителей, и генератор тактовой частоты, выходы которого подключены к тактовым входам первого и второго АЦП, согласно изобретению введены второй многоканальный согласованный приемник, подсоединенный к выходу второго АЦП, синхронизатор, первый и второй коммутаторы, первое, второе, третье, четвертое и пятое оперативные запоминающие устройства (ОЗУ), формирователь весового коэффициента (ФВК), перемножитель и вычитатель, при этом выходы первого и второго многоканальных согласованных приемников соединены соответственно с первым и вторым входами первого коммутатора, первый, второй, третий и четвертый выходы первого коммутатора соответственно через первое, второе, третье и четвертое оперативные запоминающие устройства соединены с первым, вторым, третьим и четвертым входами второго коммутатора, первый выход второго коммутатора соединен с первыми входами ФВК и вычитателя, второй выход второго коммутатора соединен с вторым входом ФВК и первым входом перемножителя, второй вход которого подсоединен к выходу ФВК, выход перемножителя соединен с вторым входом вычитателя, выход вычитателя подсоединен к входу пятого ОЗУ, выход которого является выходом когерентного автокомпенсатора, первый и второй выходы синхронизатора соединены соответственно с управляющими входами первого и второго коммутаторов, третий выход синхронизатора подключен к входам «запись» первого и третьего ОЗУ, четвертый выход синхронизатора подключен к входам «запись» второго и четвертого ОЗУ, пятый выход синхронизатора подключен к входам «чтение» первого и третьего ОЗУ, шестой выход синхронизатора соединен с входами «чтение» второго и четвертого ОЗУ, седьмой, восьмой и девятый выходы синхронизатора подключены соответственно к третьему, четвертому и пятому входам ФВК, а десятый и одиннадцатый выходы синхронизатора соединены соответственно с входом «запись» и входом «чтение» пятого ОЗУ.
При этом формирователь весового коэффициента содержит последовательно соединенные логический модуль, блок деления, накапливающий сумматор, блок нормировки, формирователь обратной величины и шестое ОЗУ.
Благодаря введению указанных блоков в данном устройстве реализован алгоритм ДПФ (дискретное преобразование Фурье) без весовой обработки.
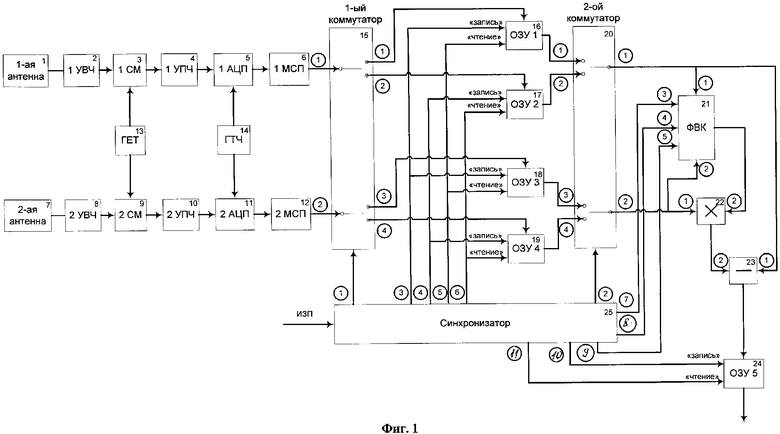
На фиг.1 приведена структурная электрическая схема когерентного автокомпенсатора помех для многоканальных импульсно-доплеровских бортовых радиолокационных станций; на фиг.2 диаграммы, поясняющие его работу; на фиг.3 - структурная электрическая схема формирователя весового коэффициента; на фиг.4, а-с приведены результаты анализа характеристик предлагаемого устройства методом математического моделирования.
Когерентный автокомпенсатор помех для многоканальных импульсно-доплеровских бортовых радиолокационных станций (фиг.1) содержит основной приемный канал, состоящий из последовательно соединенных первой антенны 1, первого усилителя высокой частоты 2, первого смесителя 3, первого усилителя промежуточной частоты 4, первого аналого-цифрового преобразователя (АЦП) 5 и первого многоканального согласованного приемника (МСП) 6, компенсационный канал, состоящий из последовательно соединенных второй антенны 7, второго усилителя высокой частоты 8, второго смесителя 9, второго усилителя промежуточной частоты 10, второго АЦП 11 и второго МСП 12, гетеродин 13, выходы которого соединены с гетеродинными входами первого и второго смесителей 3, 9, генератор тактовой частоты 14, выходы которого подключены к тактовым входам первого и второго АЦП 5, 11, первый коммутатор 15, первое оперативное запоминающее устройство (ОЗУ) 16, второе ОЗУ 17, третье ОЗУ 18, четвертое ОЗУ 19, второй коммутатор 20, формирователь весового коэффициента (ФВК) 21, перемножитель 22, вычитатель 23, пятое ОЗУ 24 и синхронизатор 25, при этом выходы первого и второго многоканальных согласованных приемников 6 и 12 соединены соответственно с первым и вторым входами первого коммутатора 15, первый, второй, третий и четвертый выходы первого коммутатора 15 соответственно через первое, второе, третье и четвертое ОЗУ 16, 17, 18, 19 соединены с первым, вторым, третьим и четвертым входами второго коммутатора 20, первый выход второго коммутатора 20 соединен с первыми входами ФВК 21 и вычитателя 23, второй выход второго коммутатора 20 соединен с вторым входом ФВК 21 и первым входом перемножителя 22, второй вход которого подключен к выходу ФВК 21, выход перемножителя 22 соединен с вторым входом вычитателя 23, выход вычитателя 23 подсоединен к входу пятого ОЗУ 24, выход которого является выходом когерентного автокомпенсатора, первый и второй выходы синхронизатора 25 соединены соответственно с управляющими входами первого и второго коммутаторов 15, 20, третий выход синхронизатора 25 подключен к входам «запись» первого и третьего ОЗУ 16,18, четвертый выход синхронизатора 25 подключен к входам «запись» второго и четвертого ОЗУ 17, 19, пятый выход синхронизатора 25 подключен к входам «чтение» первого и третьего ОЗУ 16, 19, шестой выход синхронизатора 25 соединен с входами «чтение» второго и четвертого ОЗУ 17, 19, седьмой, восьмой и девятый выходы синхронизатора 25 подключены соответственно к третьему, четвертому и пятому входам ФВК 21, а десятый и одиннадцатый выходы синхронизатора 25 соединены соответственно с входом «запись» и входом «чтение» пятого ОЗУ 24.
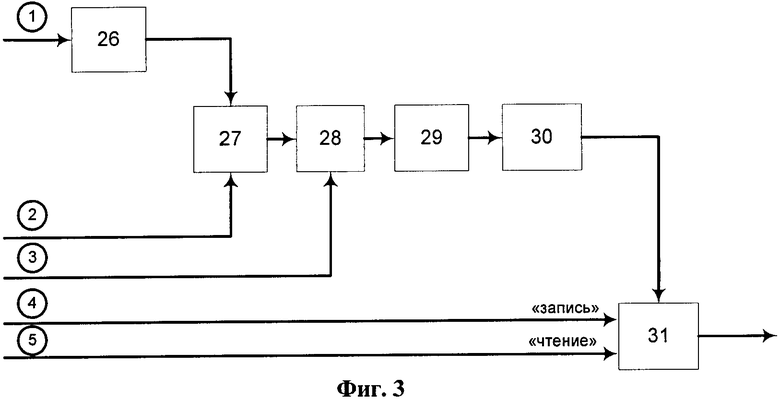
Формирователь весового коэффициента (ФВК) 21 (фиг.3) содержит последовательно соединенные логический модуль 26, блок деления 27, накапливающий сумматор 28, блок нормировки 29, формирователь обратной величины 30 и шестое ОЗУ 31.
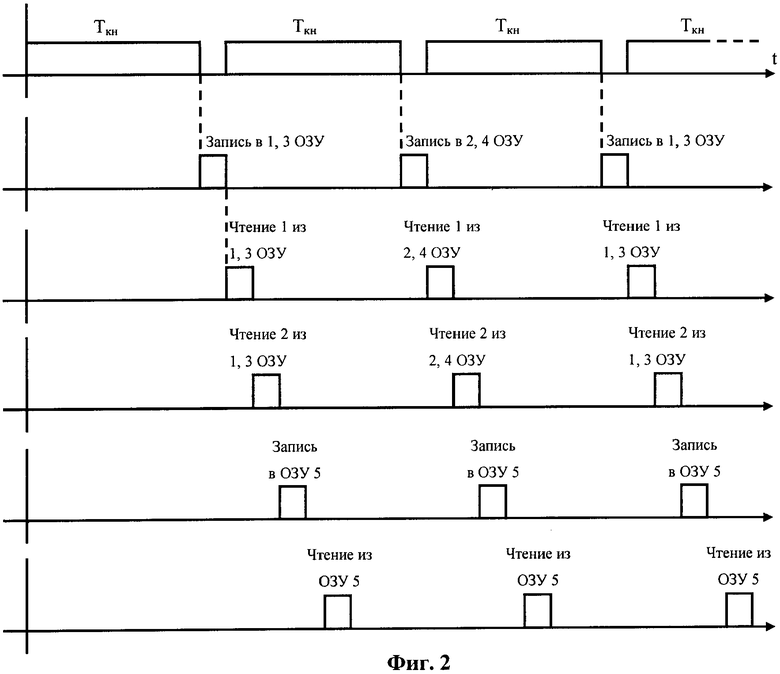
На фиг.2 приведена временная диаграмма работы когерентного автокомпенсатора помех.
Работа компенсатора осуществляется по тактам, равным времени когерентного накопления полезного сигнала (сигнала цели). В дальнейшем предполагается также, что время когерентного накопления сигнала близко к времени нахождения луча на данной угловой позиции.
Структура и параметры многоканального согласованного приемника определяются параметрами зондирующего сигнала и зоной неопределенности параметров ожидаемого сигнала. Дальнейшее рассмотрение будем проводить для бортовых РЛС с зондирующим сигналом типа когерентная импульсная последовательность с высокими частотами повторения, нашедшего широкое применение. Для такого сигнала согласованная обработка заключается в стробировании (открывании) приемника на время ожидаемого прихода сигнала и когерентном накоплении результирующей выборки. Многоканальный согласованный приемник осуществляет согласованную обработку сигнала в заданном диапазоне дальностей (7-9 каналов дальности) и доплеровского сдвига частоты (порядка 50 кГц). Число каналов определяется как произведение числа каналов дальности на число элементов разрешения по доплеровской частоте.
Когерентный автокомпенсатор помех для многоканальных импульсно-доплеровских бортовых радиолокационных станций работает следующим образом.
Совокупность полезного сигнала и помехи принимается антеннами 1, 2 основного и компенсационного каналов. Принятые сигналы усиливаются, преобразуются по частоте, преобразуются в цифровую форму и согласованно обрабатываются в идентичных цифровых многоканальных согласованных приемниках (МСП) 6, 12. По окончании времени согласованной обработки комплексные отсчеты сигналов с выхода каждого из каналов МСП 6 переписываются в первое ОЗУ 16, а комплексные отсчеты сигналов с выхода каждого из каналов МСП 12 переписываются в третье ОЗУ 18. По окончании записи по сигналу, поступающему с первого выхода синхронизатора 25, коммутатор 15 соединяет выход МСП 6 с входом второго ОЗУ 17, а выход МСП 12 - с входом четвертого ОЗУ 19. Поэтому по окончании следующего такта когерентного накопления сигнала отсчеты с выходов МСП 6 и 12 будут записываться в ОЗУ 17 и 19. По окончании записи сигналы из ОЗУ 16 и 18 по сигналу, поступающему с пятого выхода синхронизатора 25, подаются на первый вход перемножителя 22 и в ФВК 21, который открывается импульсом, поступающим с седьмого выхода синхронизатора 25 на третий вход ФВК 21. По окончании первого импульса считывания, поступающего с пятого выхода синхронизатора 25, на выходе ФВК 21 формируется комплексная величина, поступающая на второй вход перемножителя 22. По окончании первого импульса считывания синхронизатор 25 формирует второй импульс считывания, по которому еще раз считывается информация, хранящаяся в первом и третьем ОЗУ 16 и 18. При этом все отсчеты, снимаемые с третьего ОЗУ 18 через второй коммутатор 20, умножаются на весовой коэффициент, сформированный в ФВК 21. Из каждого отсчета, снимаемого с первого выхода второго коммутатора 20, в вычитателе 23 вычитаются отсчеты, снимаемые с второго выхода второго коммутатора 20 и умноженные в перемножителе 22 на весовой коэффициент. Результаты записываются в пятом ОЗУ 24, который переводится в режим «запись» сигналом, поступающим с десятого выхода синхронизатора 25. Записанные отсчеты в пятом ОЗУ 24 и являются отсчетами сигнала на выходах МСП 6 основного канала, в которых помеховый сигнал скомпенсирован, т.е. выход пятого ОЗУ 24 является выходом устройства.
Формирователь весового коэффициента (ФВК) 21 (фиг.3) работает следующим образом. На первый и второй входы ФВК 21 поступают сигналы с первого и второго выходов второго коммутатора 20 соответственно. Это - отсчеты с выходов соответствующих каналов МСП 6 и 12. Сигнал, поступающий на первый вход, поступает на логический модуль 26. Логический модуль 26 формирует выходной сигнал в соответствии со следующим алгоритмом: если модуль комплексного отсчета, поступающего по первому каналу, больше или равен пороговому значению, то отсчет проходит на выход логического модуля 26 с коэффициентом, равным 1. Если модуль комплексного отсчета, поступающего по первому каналу, менее порогового значения, то на выходе логического модуля 26 формируется максимальное число, соответствующее данной разрядной сетке. Далее отсчеты поступают на блок деления 27, где комплексное число, поступающее по второму входу, делится на комплексное число, поступающее с выхода логического модуля 26. Комплексные отсчеты с выхода блока деления 27 поступают на накапливающий сумматор 28 и далее на блок нормировки 29. В блоке нормировки 29 осуществляется деление на действительную величину, равную количеству отсчетов, суммируемых в накапливающем сумматоре 28 (число отсчетов равно числу каналов в МСП 6 или МСП 12). В формирователе обратной величины 30 формируется обратная величина, которая записывается в шестом ОЗУ 31 по сигналу «запись» с восьмого выхода синхронизатора 25. Записанная величина по сигналу «чтение» с девятого выхода синхронизатора 25 поступает на второй вход перемножителя 22.
Рассмотрим работу устройства.
В соответствии с изложенным будем далее оперировать отсчетами сигналов на выходах МСП 6, 12, которые для основного и компенсационного каналов будем предполагать идентичными. Комплексные амплитуды напряжений сигналов на выходе МСП 6 основного канала можно представить в виде:

где индекс i - номер канала согласованного приемника i=1…N, N - число каналов;
aпoi, φпoi - амплитуда и фаза сигнала помехи на выходе i-го канала многоканального согласованного приемника 6; ac, φc - амплитуда и фаза полезного сигнала, Ai - коэффициент, равный единице в том случае, если параметры полезного сигнала (доплеровский сдвиг частоты, запаздывание) совпадают с параметрами настройки i-го приемного канала, и нулю - в противном случае; bшoi, φшoi - амплитуда и фаза составляющей, обусловленной собственным шумом. Сигналы, поступающие с выхода второй (компенсационной) антенны 7, равны сигналам, поступающим с выхода первой (основной) антенны 1, умноженным на комплексный коэффициент, зависящий от коэффициентов усиления первой и второй антенн 1, 2 в направлении источника помехи.
В предположении, что коэффициент усиления второй антенны 7 компенсационного канала в направлении на источник полезного сигнала много меньше коэффициента усиления первой антенны 1 основного канала, сигнал на выходе многоканального согласованного приемника 12 компенсационного канала можно записать как:

Здесь aпoi, φпoi - амплитуда и фаза сигнала помехи на выходе i-го канала МСП 12;
φшki, φшki - амплитуда и фаза составляющей, обусловленной собственным шумом на выходе i-го канала МСП 12, K - комплексный коэффициент, характеризующий различия в коэффициентах передачи первой антенны 1 основного канала и второй антенны 2 компенсационного канала.
Поскольку, как отмечалось выше, многоканальные согласованные приемники 6, 12 в основном и компенсационном каналах идентичны, помеху в каждом приемном канале можно скомпенсировать, вычитая из сигнала i-го (i=1…N) канала МСП 6 основного канала сигнал соответствующего канала МСП 12 компенсационного канала, умноженный на соответствующий коэффициент. Таким образом, результирующий сигнал, соответствующий i-му каналу МСП 6, но снимаемый с выхода пятого ОЗУ 24, при предлагаемом методе компенсации равен:

или 

Помеха будет полностью скомпенсирована, если (1-НК)=0, для чего необходимо, чтобы
т.е модуль Н должен быть равен:  ,
,
а фаза φH=-φK
Значение Н формируется формирователем 21 весового коэффициента по помеховым отсчетам в МСП 6,12 в соответствии с выражением:

Где 
Эффективность предлагаемого метода компенсации помех оценивалась методом математического моделирования. Для моделирования за основу взяты два идентичных по структуре и параметрам МСП - компенсационный и основной. На вход основного многоканального согласованного приемника подается шумовой сигнал ξ(t) (шум с нормальным распределением, попадающий в восемь разрядов АЦП) и гармонический сигнал s(t) с частотой 10 кГц (два разряда АЦП), а на вход компенсационного канала - такой же шумовой сигнал (восемь разрядов АЦП) с коэффициентом Kкк. Таким образом, реализована ситуация, когда уровень сигнала значительно ниже уровня шумов.
При моделировании использовались следующие параметры:
а) разрядность АЦП - 12 (11+знак);
б) время когерентного накопления - 80 мс;
в) длительность импульса - 1 мкс;
г) период следования импульсов - 5 мкс;
д) частота дискретизации - 84 МГц;
е) количество фильтровых каналов - 4096.
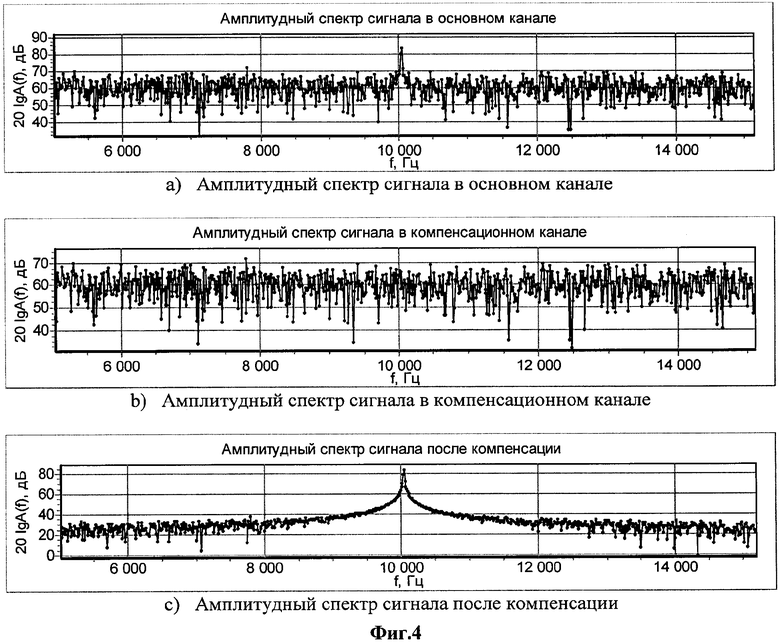
В многоканальном согласованном приемнике реализованы алгоритм ДПФ (дискретное преобразование Фурье) без весовой обработки. Для анализа и оценки результатов моделирования было проведено сравнение амплитудных спектров сигналов в основном и компенсационном каналах (фиг.4,a и 4,b соответственно) и амплитудный спектр сигнала после компенсации (фиг.4,с). Сигнал в основном канале превышает уровень шума на 10 дБ (доплеровский сдвиг частоты сигнала 10 кГц). После компенсации, выполненной на основе данного алгоритма, сигнал превышает уровень шума на 45 дБ.
Анализ результатов моделирования показал, что предлагаемый алгоритм
- не требует времени на адаптацию параметров, т.е. может использоваться в режиме «Обзор»; позволяет обеспечить подавление шумовой помехи на 25-30 дБ.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2011 |
|
RU2495449C2 |
| АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2010 |
|
RU2451373C1 |
| Цифровое устройство селекции движущихся целей | 1984 |
|
SU1841294A1 |
| ЦИФРОВАЯ АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2015 |
|
RU2617457C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БЫСТРОЙ СИНХРОНИЗАЦИИ В СИСТЕМАХ С ШУМОПОДОБНЫМИ СИГНАЛАМИ | 1989 |
|
SU1841074A1 |
| ПРИЕМО-ПЕРЕДАЮЩЕЕ УСТРОЙСТВО РАДИОЛОКАТОРА | 1985 |
|
SU1841065A1 |
| Многоканальное устройство обработки сложных сигналов | 1989 |
|
SU1704117A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2006 |
|
RU2315332C1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ ШИРОКОПОЛОСНЫХ ПОМЕХ | 2014 |
|
RU2602508C2 |
Когерентный автокомпенсатор помех для многоканальных импульсно-доплеровских бортовых радиолокационных станций относится к области радиолокации. Достигаемый технический результат заключается в обеспечении времени адаптации автокомпенсатора, равного времени когерентного накопления сигнала. Указанный результат достигается за счет того, что автокомпенсатор содержит основной приемный канал, компенсационный канал, два идентичных многоканальных согласованных приемника, выполненных определенным образом, гетеродин, соединенный со смесителями каналов, генератор тактовой частоты, соединенный с входами аналого-цифровых преобразователей каналов, первый и второй коммутаторы, пять оперативных запоминающих устройств (ОЗУ), формирователь весового коэффициента, перемножитель и вычитатель, соединенных определенным образом между собой, при этом выход пятого ОЗУ является выходом устройства, управляющие входы коммутаторов, формирователя весового коэффициента и входы «запись» и «чтение» всех ОЗУ соединены с синхронизатором. 4 ил.
Когерентный автокомпенсатор помех для многоканальных импульсно-доплеровских бортовых радиолокационных станций, содержащий основной приемный канал, состоящий из последовательно соединенных первой антенны, первого усилителя высокой частоты, первого смесителя, первого усилителя промежуточной частоты, первого аналого-цифрового преобразователя (АЦП) и первого многоканального согласованного приемника, предназначенного для получения по окончании согласованной обработки комплексных отсчетов сигнала, компенсационный канал, состоящий из последовательно соединенных второй антенны, второго усилителя высокой частоты, второго смесителя, второго усилителя промежуточной частоты и второго АЦП, гетеродин, выходы которого соединены с гетеродинными входами первого и второго смесителей, и генератор тактовой частоты, выходы которого подключены к тактовым входам первого и второго АЦП, отличающийся тем, что в него введены второй многоканальный согласованный приемник, идентичный первому, подсоединенный к выходу второго АЦП, синхронизатор, первый и второй коммутаторы, первое, второе, третье, четвертое и пятое оперативные запоминающие устройства (ОЗУ), формирователь весового коэффициента (ФВК), перемножитель и вычитатель, при этом выходы первого и второго многоканальных согласованных приемников соединены соответственно с первым и вторым входами первого коммутатора, первый, второй, третий и четвертый выходы первого коммутатора соответственно через первое, второе, третье и четвертое ОЗУ соединены с первым, вторым, третьим и четвертым входами второго коммутатора, первый выход второго коммутатора соединен с первыми входами ФВК и вычитателя, второй выход второго коммутатора соединен с вторым входом ФВК и первым входом перемножителя, второй вход которого подсоединен к выходу ФВК, выход перемножителя соединен с вторым входом вычитателя, выход вычитателя подсоединен к входу пятого ОЗУ, выход которого является выходом когерентного автокомпенсатора помех, первый и второй выходы синхронизатора соединены соответственно с управляющими входами первого и второго коммутаторов, третий выход синхронизатора подключен к входам «запись» первого и третьего ОЗУ, четвертый выход синхронизатора подключен к входам «запись» второго и четвертого ОЗУ, пятый выход синхронизатора подключен к входам «чтение» первого и третьего ОЗУ, шестой выход синхронизатора соединен с входами «чтение» второго и четвертого ОЗУ, седьмой, восьмой и девятый выходы синхронизатора подключены соответственно к третьему, четвертому и пятому входам ФВК, а десятый и одиннадцатый выходы синхронизатора соединены соответственно с входом «запись» и входом «чтение» пятого ОЗУ, ФВК содержит последовательно соединенные логический модуль, вход которого является первым входом ФВК, блок деления, накапливающий сумматор, блок нормировки, формирователь обратной величины и шестое ОЗУ, выход которого является выходом ФВК, при этом вторые входы блока деления и накапливающего сумматора, а также вход «запись» и вход «чтение» шестого ОЗУ являются соответственно вторым, третьим, четвертым и пятым входами ФВК, логический модуль предназначен для формирования выходного сигнала, причем, если модуль комплексного отсчета, поступающего по первому каналу, больше или равен пороговому значению, то отсчет проходит на выход логического модуля с коэффициентом единица, если менее порогового значения, то на выходе логического модуля формируется максимальное число, соответствующее разрядной сетке.
| БЯЛЫЙ Л.И., ПОДТУРКИН В.В | |||
| Алгоритм адаптивной фильтрации и пеленгации источников помех в системе ФАР | |||
| Ж.: Радиотехника, 1992б №7, 8 | |||
| УСТРОЙСТВО ЦИФРОВОЙ КОГЕРЕНТНОЙ ОБРАБОТКИ СИГНАЛОВ | 1990 |
|
SU1818989A1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ В РЛС С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 1991 |
|
RU2230337C2 |
| СПОСОБ КОМПЕНСАЦИИ ВНУТРИКАНАЛЬНЫХ АДДИТИВНЫХ РАДИОПОМЕХ В ПРИЕМНИКАХ АМПЛИТУДНО-МОДУЛИРОВАННЫХ, ЧАСТОТНО- И ФАЗОМАНИПУЛИРОВАННЫХ РАДИОСИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2100903C1 |
| US 6295017 B1, 25.09.2001 | |||
| US 6184820 B1, 06.02.2001 | |||
| СПОСОБ ПОЛУЧЕНИЯ ВЫСОКОПРОЧНОГО ТОЛСТОЛИСТОВОГО СТАЛЬНОГО ПРОКАТА НА РЕВЕРСИВНОМ СТАНЕ (ВАРИАНТЫ) | 2020 |
|
RU2745390C1 |

