ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
Данная заявка испрашивает приоритет согласно 119(e) 35 раздела свода законов США предварительной патентной заявки № 62/016856, поданной 25 июня 2014 года, полное содержание и сущность которой включены сюда посредством ссылки, как если бы были полностью изложены в данном документе.
УРОВЕНЬ ТЕХНИКИ
1. Область Техники
Аспекты представленного изобретения относятся к землеройным машинам, а более конкретно к оптимизации динамического движения землеройных машин.
2. Описание предшествующего уровня техники
Обычно, землеройные машины представляют собой большие и дорогие машины, которые используются для выемки больших количеств покрывающей породы и минерального сырья. Данные землеройные машины часто содержат множество двигателей, управляющих работой различных составных элементов землеройной машины. Для того чтобы работать, операторы землеройных машин используют набор средств управления для одновременного приведения в действие множества двигателей. Вследствие размера землеройных машин и сложности работы, операторы должны быть хорошо обучены, чтобы эксплуатировать землеройные машины безопасно и должным образом.
Несмотря на интенсивное обучение, операторы повседневно совершают ошибки в работе землеройных машин, которые могут являться причиной повреждения землеройной машины и приводить к простою землеройной машины и увеличенной продолжительности производственного цикла. Умение, с которым оператор может эксплуатировать землеройную машину, вносит существенный вклад в производительность землеройной машины.
СУЩНОСТЬ
Аспекты представленного изобретения относятся к алгоритму оптимизации динамического движения землеройной машины, который может уменьшить вероятность, что ошибка оператора может явиться причиной повреждения землеройной машины и привести к простою землеройной машины и увеличенной продолжительности производственного цикла.
В иллюстративных вариантах осуществления система управления землеройной машины выполнена с возможностью предотвращения операции поворота в то время, как землеройная машина участвует в копающем движении, выполнена с возможностью ограничения скорости черпания на основании угла загрузки, выполнена с возможностью ограничения скорости лебедки на основании груза в ковше, и/или выполнена с возможностью предотвращения остановки землеройной машины во время выемки грунта.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
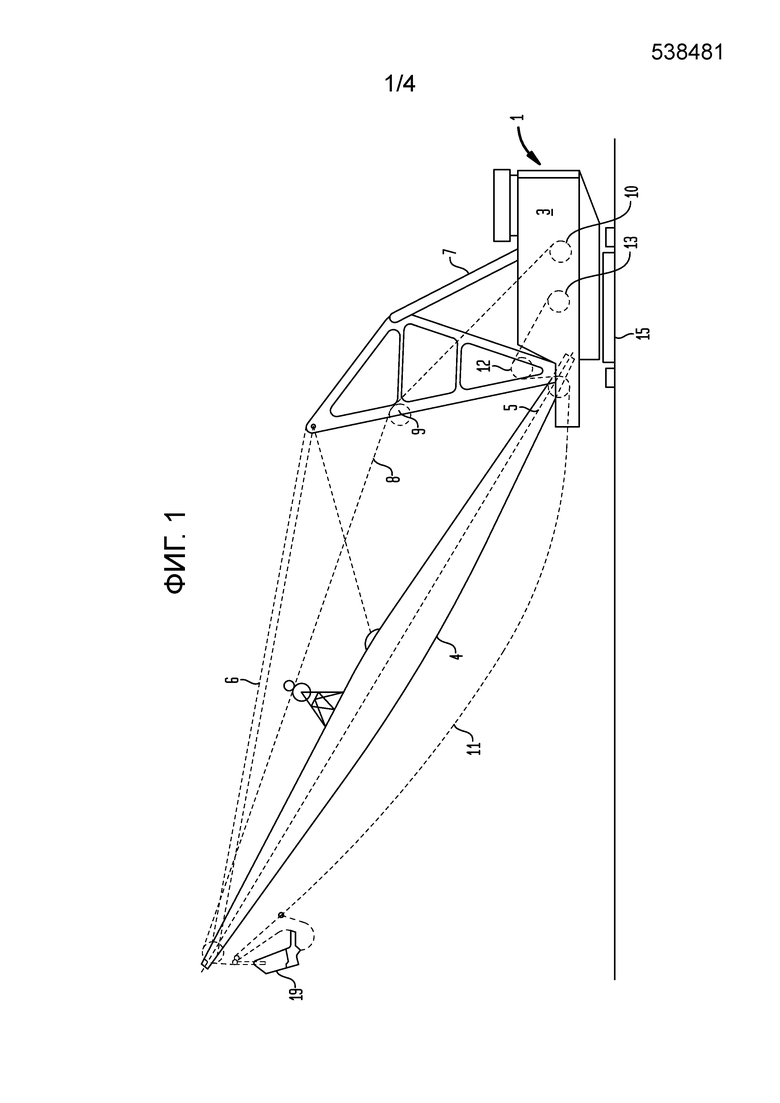
ФИГ. 1 представляет собой перспективное изображение землеройной машины, т.е. канатно-скребковой машины, в соответствии с иллюстративным вариантом осуществления представленного изобретения.
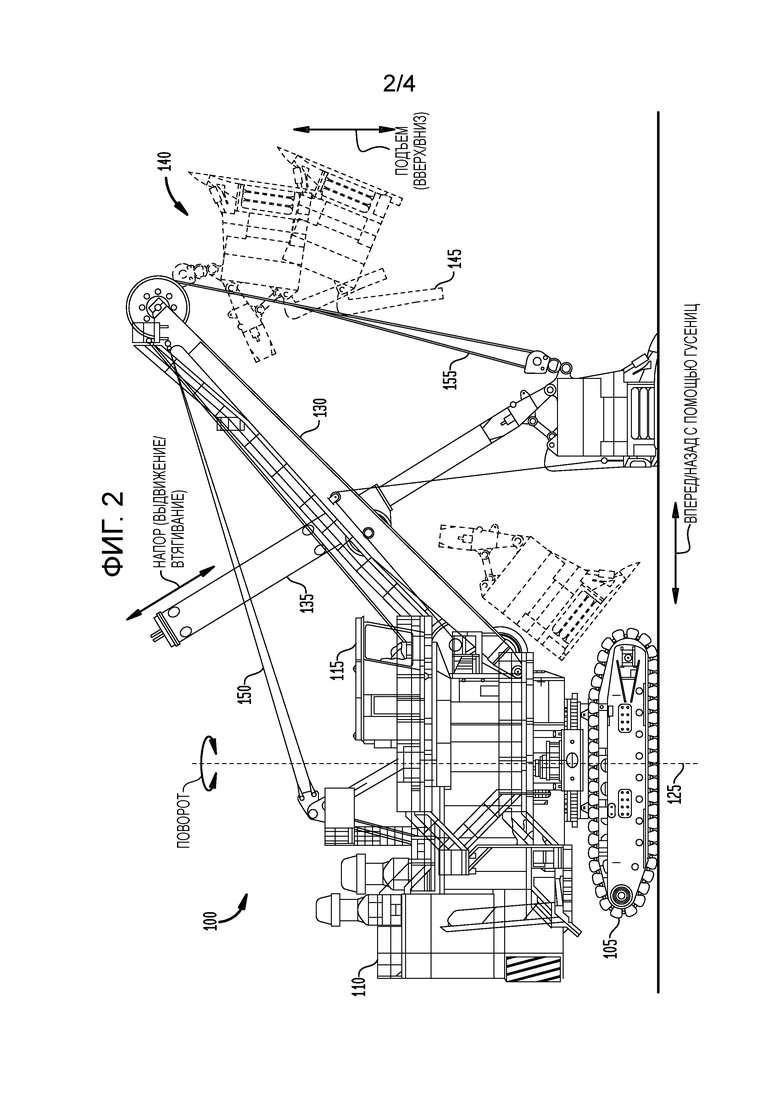
ФИГ. 2 представляет собой перспективное изображение еще одной землеройной машины, т.е. электрической канатно-ковшовой машины, в соответствии с иллюстративным вариантом осуществления представленного изобретения.
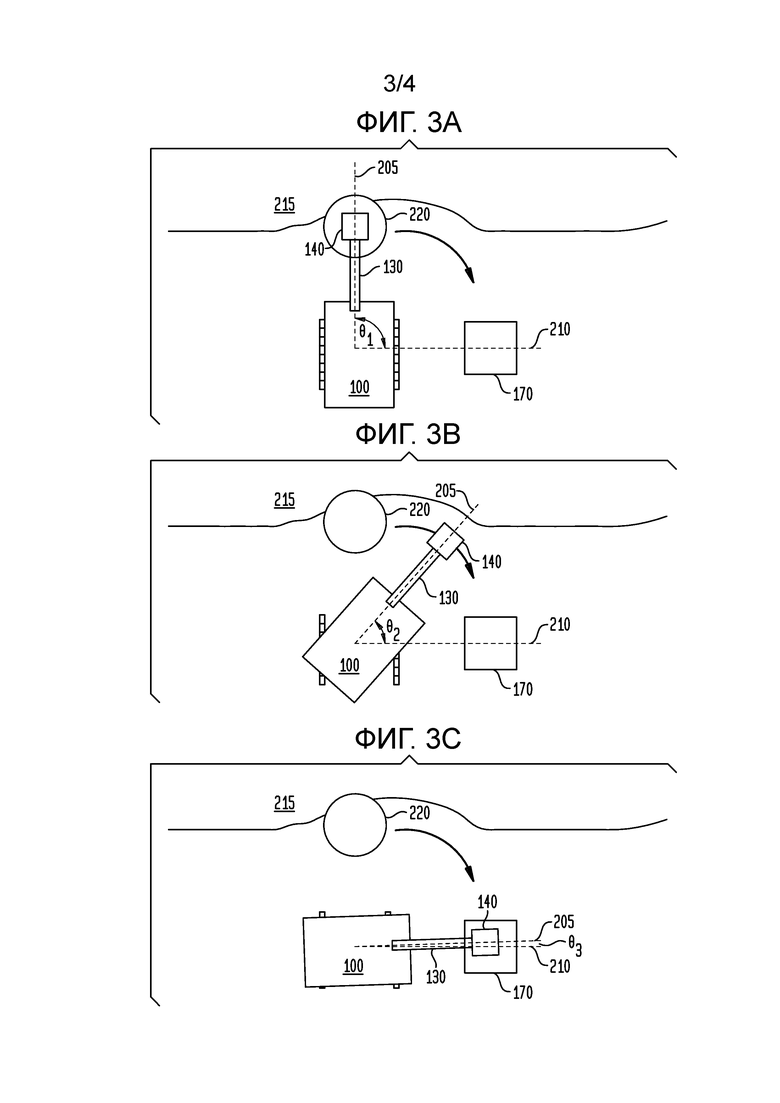
Фигуры 3A, 3B и 3C изображают цикл поворота землеройной машины между местом копания и местом выгрузки в соответствии с иллюстративными вариантами осуществления представленного изобретения; а
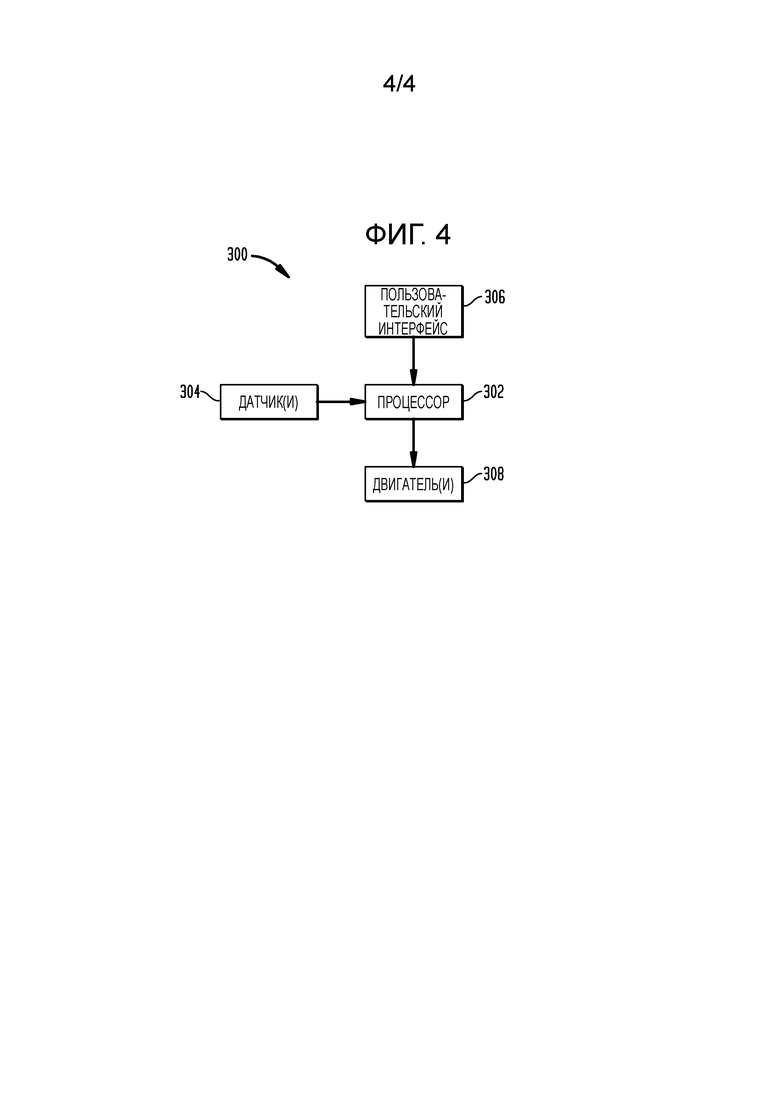
ФИГ. 4 представляет собой блок-схему системы управления для землеройной машины в соответствии с иллюстративным вариантом осуществления представленного изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
Для облегчения понимания вариантов осуществления, принципов и признаков представленного изобретения, они объясняются далее со ссылкой на исполнение в иллюстративных вариантах осуществления. В частности, они описаны в контексте систем и способов оптимизации динамического движения землеройных машин.
Однако варианты осуществления представленного изобретения не ограничены использованием в описанных системах или способах.
Составные элементы и материалы, описанные далее в качестве составляющих различных вариантов осуществления, предназначены для пояснения, а не для ограничения. Многие подходящие составные элементы и материалы, которые выполняли бы такую же или аналогичную функцию, что и материалы, описанные в данном документе, предназначены для включения в пределы объема правовых притязаний вариантов осуществления представленного изобретения.
Хотя системы и способы, которые могут быть описаны в данном документе, могут быть направлены либо на канатно-скребковую землеройную машину, либо на электрическую канатно-ковшовую машину, описанная технология, включая системы и способы данного документа, также может предоставляться, использоваться, эксплуатироваться и/или осуществляться в различных других землеройных машинах.
Далее со ссылкой на ФИГ. 1 проиллюстрирована часть землеройной машины 1, в данном случае канатно-скребковая землеройная машина. Канатно-скребковая землеройная машина 1 содержит основание, которое опирается на землю и поддерживает корпус 3 машины. Корпус 3 машины несет стрелу 4, выступающую вверх от нижней передней части корпуса 3. Стрела 4 содержит основание, которое соединено с корпусом, например, соединительным элементом и не ограничено пальцами 5 основания. В иллюстративных вариантах осуществления стрела 4 удерживается с требуемым углом наклона посредством подвесных канатов 6, продолжающихся от стрелы 4 до A-образной рамы 7, содержащейся на верхней части корпуса 3. Землеройный элемент, например ковш 19, подвешен на подъемных тросах 8, которые проходят поверх шкивов 9 на опоре для намотки на барабанах 10 лебедки в корпусе.
Во время работы ковш 19 может передвигаться в направлении канатно-скребковой землеройной машины 1 тяговыми канатами 11, проходящими поверх направляющих блоков 12 около пальцев 5 основания стрелы и на тяговые барабаны 13 в корпусе 3 машины. Канатно-скребковая землеройная машина 1 может быть установлена на механизм 15 шагающего движения, который предоставляет возможность передвижения канатно-скребковой землеройной машины 1 с одного места на другое. Механизм 15 шагающего движения содержит башмак, который общепринятым образом внутренне приводится в движение системами привода, содержащими внутренний двигатель и узел зубчатой передачи.
Канатно-скребковые землеройные машины используются в первую очередь, чтобы копать ниже своего рабочего уровня, а разгружаться на приподнятом уровне. Цикл выемки грунта состоит из пяти составных частей: (1) тянуть для заполнения, (2) поднимать и поворачивать для разгрузки, (3) разгружать, (4) опускаться и возвращаться с поворотом и (5) расположить ковш.
Цикл канатно-скребкового экскаватора начинается с ковша, опускающегося в яму и располагающегося, чтобы проникнуть в пласт. Волочение по поверхности заполняет ковш. После заполнения почти немедленно начинается поднятие и разматывание землечерпалки, с последующим поворотом, когда ковш очищает траншею. Когда ковш поворачивает и поднимается, необходимое натяжение между средствами управления подъемом и волочением удерживают ковш в положении переноса. Когда приближается к месту выгрузки, средство управления поворотом дает обратный ход, чтобы остановить поворот, и обеспечивается возможность разматывания землечерпалки до тех пор, пока ковш не наклонится и не разгрузит свой груз. Вследствие инерции поворота машины направление поворота не будет изменяться в течение нескольких секунд после изменения направления хода средств управления, давая ковшу время разгрузиться без задержки. Во время обратного поворота лебедка опускается, а волочение пропускается для того, чтобы начать расположение ковша для следующей загрузки. Средство управления поворотом дает обратный ход, чтобы остановить движение поворота, а затем нейтрализуется, когда ковш устанавливается в положение. Умение, с которым выполняются данные функции, вносит существенный вклад в производительность машины.
ФИГ. 2 изображает еще одну землеройную машину, т.е. электрическую канатно-ковшовую машину 100. Электрическая канатно-ковшовая машина 100 содержит гусеницы 105 для передвижения электрической канатно-ковшовой машины 100 вперед и назад и для поворота электрической канатно-ковшовой машины 100 (например, за счет изменения скорости и/или направления левой и правой гусениц относительно друг друга). Электрическая канатно-ковшовая машина 100 содержит корпус 110 машины и кабину 115. Корпус 110 машины способен поворачиваться или вращаться вокруг оси 125 поворота, например, чтобы передвигаться из места копания в место выгрузки. Электрическая канатно-ковшовая машина 100 также содержит рукоять 135, поддерживающую землеройный элемент, в данном случае черпак или ковш 140. Ковш 140 содержит днище 145 для выгрузки содержимого внутри ковша 140. Электрическая канатно-ковшовая машина 100 также содержит подвесные канаты 150, соединенные между корпусом 110 машины и стрелой 130, для поддержки стрелы 130; подъемный канат 155, прикрепленный к барабану внутри корпуса 110 машины, для наматывания каната 155 с целью поднимания и опускания ковша 140; и двигатель механизма черпания для выдвижения и втягивания рукояти 135.
Когда гусеницы 105 электрического канатного экскаватора 100 являются неподвижными, ковш 140 выполнен с возможностью передвижения на основании трех управляющих действий: (1) подъема, (2) черпания и (3) поворота.
Как отмечалось выше, управление лебедкой поднимает и опускает ковш 140 посредством наматывания и разматывания подъемного каната 155. В иллюстративных вариантах осуществления подъемный канат 155 наматывается на большой барабан, приводимый в действие двигателем переменного тока, направляется через шкивы (блоки) и поддерживает узел ковша со стрелы 130. Управление черпанием выдвигает и втягивает положение рукояти 135 и ковша 140. Управление поворотом вращает корпус 110 машины относительно оси 125 поворота (см. например, ФИГУРЫ 3A-C). Посредством умелого маневрирования подъемными канатами и узлом рукояти черпания происходит управление ковшом для наполнения покрывающей породой/минеральным сырьем и разгрузки на карьерный самосвал с целью выемки грунта. Перед разгрузкой его содержимого ковш 140 передвигают в подходящее положение подъема, черпания и поворота, чтобы 1) обеспечить, что содержимое не проскочит место 170 разгрузки; 2) днище 145 не ударится о место 170 разгрузки при расцеплении; и 3) ковш 140 находится не слишком высоко, так чтобы высвобожденное содержимое не повредило бы место 170 разгрузки или не являлось причиной других нежелательных результатов.
Фигуры 3A-3C изображают иллюстративные углы поворота электрической канатно-ковшовой машины 100, передвигающейся из положения выемки грунта в положение разгрузки. Для справочных целей ось 205 стрелы и ось 210 положения разгрузки перекрываются на фигурах 3A-3C, при этом ось 125 поворота находится приблизительно на пересечение оси 205 стрелы и оси 210 положения разгрузки. Угол между осью 205 рукояти и осью 210 положения разгрузки упоминается как θ. На фиг. 3A ковш 140 вгрызается в пласт 215 в месте 220 выемки грунта, а θ=θ1. После выемки грунта, электрический канатный экскаватор 100 начинает поворачивать стрелу 130 в направлении места 170 разгрузки. На фиг. 3B стрела 130 находится приблизительно на половине пути поворота до разгрузки, а θ=θ2. На фиг. 3C стрела 130 остановилась над местом 170 разгрузки, и днище 145 расцепляется для выгрузки материалов внутри ковша 140 в место 170 выгрузки, с θ=θ3.
Далее со ссылкой на ФИГ. 4 показана блок-схема системы 300 управления для электрической канатно-ковшовой машины в соответствии с иллюстративным вариантом осуществления. Как проиллюстрировано, система 300 управления содержит процессор 302, один или более датчиков 304, пользовательский интерфейс 306 и один или более двигателей 308. В иллюстративных вариантах осуществления процессор 302 получает входные сигналы как от пользовательского интерфейса 306, так и от одного или более датчиков 304, а в ответ управляет работой одного или более двигателей 308.
В иллюстративных вариантах осуществления процессором 302 может быть схема цифровой обработки сигналов (DSP), программируемая пользователем вентильная матрица (FPGA), специализированные интегральные микросхемы (ASIC) и тому подобное. Процессором 214 может быть множество изготовленных по специальным техническим требованиям заказчика или коммерчески доступных процессоров, центральный вычислительный блок (CPU), вспомогательный процессор среди нескольких процессоров, микропроцессор на основании полупроводников (в виде микросхемы или набора микросхем), или в общем любое устройство для выполнения команд. Процессор 302 может содержать память и приемопередатчик. Процессор 302 может взаимодействовать с множеством датчиков 304 беспроводным образом или посредством проводных соединений.
Один или более датчиков 304 могут включать большое множество датчиков, расположенных в различных местах, находящихся на электрической канатно-ковшовой машине, и используют для мониторинга большого множества рабочих состояний электрической канатно-ковшовой машины. Рабочие состояния электрической канатно-ковшовой машины включают, но без ограничения, положение рукояти, положение ковша, массу материала в ковше, крутящий момент на рукояти, положение поворота, скорость черпания, скорость лебедки, угол загрузки и тому подобное. В иллюстративных вариантах осуществления процессор 302 отслеживает показания, полученные от одного или более датчиков 304, и может активно ограничивать работу одного или более двигателей 308.
Например, с пустым ковшом максимальная нижняя скорость может быть установлена на первом уровне, а с ковшом, имеющим груз свыше порогового, максимальная нижняя скорость может быть установлена на второй уровень, который ниже, чем первый уровень. В таких случаях процессор 302 может определять груз в ковше на основании показаний от одного или более датчиков 304, при этом процессор 302 может ограничивать максимальную нижнюю скорость. То есть, если оператор, посредством пользовательского интерфейса 308, попытается опуститься с максимальной скоростью, процессор 302 может ограничить максимальную скорость на основании обнаруженного груза.
В иллюстративных вариантах осуществления система 300 управления электрической канатно-ковшовой машины выполнена с возможностью предотвращения операции поворота, пока электрическая канатно-ковшовая машина вынимает грунт, как показано на фиг. 3A. Предотвращение операции поворота землеройной машины, пока землеройная машина активно вынимает грунт, может предотвратить повреждение землеройной машины. В иллюстративных вариантах осуществления процессор 302 отслеживает входные сигналы, полученные от одного или более датчиков 304, и в ответ определяет, находится ли ковш в соприкосновении с пластом. На основании вынесенного определения, что ковш находится в соприкосновении с пластом, процессор 302 может установить состояние и пометку занятости ковша. В иллюстративных вариантах осуществления при получении процессором 302 от оператора команды поворота, например, посредством пользовательского интерфейса 308, процессор 302 будет проверять, не показывает ли состояние и пометка занятости ковша, что в настоящее время ковш находится в соприкосновении с пластом. Если ковш в настоящее время не находится в соприкосновении с пластом, процессор 302 будет продолжать выполнять полученную команду поворота. Но если ковш в настоящее время находится в соприкосновении с пластом, процессор 302 не будет выполнять команду поворота. В иллюстративных вариантах осуществления процессор 302 может быть выполнен с возможностью предоставления команды тревоги с блокировкой в ответ на невыполнение полученной команды поворота. Команда тревоги с блокировкой может отображаться оператору электрической канатно-ковшовой машины для предупреждения оператора, что его команда была заблокирована. В дополнение, команда тревоги с блокировкой может регистрироваться и сохраняться в памяти процессора 302, или она может передаваться процессором 302 в отдельный блок оборудования.
В иллюстративных вариантах осуществления, например, с загруженным ковшом, система 300 управления электрической канатно-ковшовой машины выполнена с возможностью ограничения скорости черпания на основании угла загрузки. Как используется в данном документе, термин «скорость черпания» означает скорость, с которой рукоять 135 выдвигается или втягивается, как показано на фиг. 2. Как используется в данном документе, термин «угол загрузки» означает угол рукояти 135, как показано на фиг. 2, относительно вертикального положения. Например, угол загрузки рукояти 135, показанный на фиг. 2, составляет приблизительно 95°; угол загрузки, равный 0°, показал бы, что рукоять 135 находилась перпендикулярно земле. В иллюстративных вариантах осуществления рукоять выдвигается и втягивается двигателем переменного тока, а скоростью выдвижения и втягивания, скоростью черпания, управляет оператор посредством пользовательского интерфейса. В иллюстративных вариантах осуществления двигатель переменного тока, используемый для управления работой рукояти, может быть неспособен останавливать движение рукояти, если рукоять движется со скоростью черпания, когда угол загрузки является низким вследствие массы рукояти и ковша.
Соответственно, система 300 управления электрической канатно-ковшовой машины выполнена с возможностью ограничения скорости черпания на основании угла загрузки. В иллюстративных вариантах осуществления процессор 302 отслеживает один или более входных сигналов, получаемых от одного или более датчиков 304, и в ответ рассчитывает угол загрузки. В иллюстративных вариантах осуществления процессор 302 в качестве функции расчетного угла загрузки ограничивает максимальную скорость черпания. Например, когда угол загрузки уменьшается, также уменьшается максимальная скорость черпания, допускаемая процессором 302. В иллюстративных вариантах осуществления за счет ограничения максимальной скорости черпания на основании угла загрузки, процессор 302 обеспечивает, что система 300 управления способна останавливать движение рукояти, что будет помогать предотвращать повреждение ковша и рукояти электрической канатно-ковшовой машины.
В иллюстративных вариантах осуществления система 300 управления электрической канатно-ковшовой машины выполнена с возможностью ограничения скорости лебедки на основании груза в ковше. Как используется в данном документе, термин «скорость лебедки» означает скорость, с которой ковш 140 поднимается или опускается, например, как показано на фиг. 2. В иллюстративных вариантах осуществления ковш 140 поднимается и опускается двигателем переменного тока, а скоростью лебедки управляет оператор посредством пользовательского интерфейса. В иллюстративных вариантах осуществления двигатель переменного тока, используемый для управления скоростью лебедки, может быть неспособен останавливать опускающее движение ковша 140, если ковш 140 движется с высокой скоростью лебедки в зависимости от груза в ковше 140.
В иллюстративных вариантах осуществления процессор 302 отслеживает входные сигналы, полученные от одного или более датчиков 304, а в ответ рассчитывает груз в ковше. В иллюстративных вариантах осуществления процессор 302 в качестве функции груза в ковше ограничивает максимальную опускающую скорость лебедки. Например, когда груз в ковше увеличивается, максимальная опускающая скорость лебедки, допускаемая процессором 302, уменьшается. В иллюстративных вариантах осуществления за счет ограничения максимальной опускающей скорости лебедки на основании груза в ковше, процессор 302 обеспечивает, что система 300 управления способна останавливать движение ковша 140, что будет помогать предотвращать повреждение электрической канатно-ковшовой машины.
В иллюстративных вариантах осуществления система 300 управления электрической канатно-ковшовой машины выполнена с возможностью предотвращения остановки работы землеройной машины в то время, как землеройная машина вынимает грунт. Электрическая канатно-ковшовая машина может заглохнуть во время работы по множеству причин. Одно из наиболее обычных условий, которые могут являться причиной остановки работы, состоит в том, не поместил ли оператор ковш слишком глубоко в пласт. Другими словами, если оператор попытается вынуть слишком много материала за одну операцию с ковшом. В общем, предотвращение остановки работы электрической канатно-ковшовой машины в то время, как электрическая канатно-ковшовая машина активно вынимает грунт будет уменьшать продолжительность производственного цикла электрической канатно-ковшовой машины, повышая посредством этого эффективность электрической канатно-ковшовой машины.
В иллюстративных вариантах осуществления процессор 302 отслеживает входные сигналы, полученные от одного или более датчиков 304, и в ответ определяет, не собирается ли заглохнуть электрическая канатно-ковшовая машина. В иллюстративных вариантах осуществления один или более входных сигналов могут включать, но без ограничения, уровень напряжения одного или более двигателей переменного тока электрической канатно-ковшовой машины, крутящий момент на рукояти электрической канатно-ковшовой машины, натяжение подъемного каната электрической канатно-ковшовой машины и тому подобное. В иллюстративных вариантах осуществления процессор 302 системы 300 управления непрерывно рассчитывает процент вероятности, что электрическая канатно-ковшовая машина заглохнет на основании входных сигналов, получаемых от одного или более датчиков 304. Процессор 302 содержит пороговое значение остановки работы, которое сравнивается с расчетным процентным значением, а когда расчетное процентное значение превышает пороговое значение остановки работы, процессор может установить флажок, указывающий, что вероятна остановка работы электрической канатно-ковшовой машины.
В иллюстративных вариантах осуществления на основании установки процессором 302 флажка, указывающего, что вероятна остановка работы электрической канатно-ковшовой машины, система 302 управления может производить автоматические регулировки работы электрической канатно-ковшовой машины и может также предоставить оператору электрической канатно-ковшовой машины сигнал тревоги с блокировкой условия остановка работы. В одном варианте осуществления автоматическая регулировка работы электрической канатно-ковшовой машины включает подачу команды двигателю переменного тока, регулирующему рукоять, втянуть на заданное расстояние. За счет втягивания рукояти количество материала, которое ковш извлекает из пласта, уменьшается, и может быть уменьшена вероятность возникновения остановки работы.
В иллюстративных вариантах осуществления система 300 управления отслеживает работу электрической канатно-ковшовой машины и производит автоматические регулировки работы электрической канатно-ковшовой машины, когда вероятность, что может произойти остановка работы, превышает пороговый уровень. Соответственно, система 300 управления уменьшает вероятность, что электрическая канатно-ковшовая машина испытает остановку во время работы, и посредством этого увеличивается эффективность электрической канатно-ковшовой машины.
Терминология, используемая в данном документе, предназначена только для цели описания конкретных вариантов осуществления и не предназначена для ограничения изобретения. Кроме того, должно быть понятно, что термины «содержит» и/или «содержащий» при использовании в данном описании указывают на наличие заявленных признаков, чисел, стадий, операций, элементов и/или составных частей, но не исключают наличия или добавления одного или более других признаков, чисел, стадий, операций, элементов, и/или составных частей, и/или их групп.
Соответствующие конструкции, материалы, действия и эквиваленты всех значений или стадий плюс исполнительные элементы в формуле изобретения ниже предназначены охватывать любую конструкцию, материал или действие для выполнения функции в комбинации с другими заявленными элементами, которые конкретно заявлены. Описание представленного изобретения было представлено с целью пояснения и описания, но не предназначено считаться исчерпывающим или ограничиваться изобретением в раскрытом виде. Множество модификаций и вариантов будут очевидны рядовым специалистам в данной области без выхода за пределы объема правовых притязаний и сущности изобретения. Вариант осуществления был выбран и описан для того, чтобы лучше всего объяснить принципы изобретения и практический вариант применения и чтобы позволить другим рядовым специалистам в данной области понять изобретение для различных вариантов осуществления с различными модификациями, подходящими для конкретного предполагаемого использования.
Составные элементы и материалы, описанные далее в качестве составляющих различных вариантов осуществления, предназначены для пояснения, а не для ограничения. Множество подходящих составных элементов и материалов, которые выполняли бы одну и ту же или аналогичную функцию, что и материалы, описанные в данном документе, предназначены для включения в пределы объема правовых притязаний вариантов осуществления представленного изобретения. Несмотря на то что варианты осуществления представленного изобретения были раскрыты в иллюстративных формах, квалифицированным специалистам в данной области должно быть очевидно, что в нем может быть сделано множество модификаций, дополнений и исключений без выхода за пределы сущности и объема правовых притязаний изобретения и его эквивалентов, которые изложены в следующей формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННОЕ УПРАВЛЕНИЕ ПОВОРОТОМ КОВША ДЛЯ ЭКСКАВАТОРА | 2013 |
|
RU2613699C2 |
| СИСТЕМА УПРАВЛЕНИЯ РУКОЯТЬЮ ЭКСКАВАТОРА | 2015 |
|
RU2681800C2 |
| СИСТЕМА ИЗОБРАЖЕНИЯ СВЕРХУ ДЛЯ ЭКСКАВАТОРА | 2013 |
|
RU2625438C2 |
| ПРОМЫШЛЕННАЯ МАШИНА И СПОСОБ ОРЕДЕЛЕНИЯ РЕГУЛИРУЕМОГО ПРОКЛАДКАМИ ЗАЗОРА ОПОРНОГО БЛОКА ПРОМЫШЛЕННОЙ МАШИНЫ (ВАРИАНТЫ) | 2013 |
|
RU2615535C2 |
| КОЗЫРЕК КОВША ЭКСКАВАТОРА | 2022 |
|
RU2826071C2 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ ГОРНОЙ МАШИНЫ | 2014 |
|
RU2658407C2 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР СИСТЕМЫ ИНЖЕНЕРА КУРКОВА | 1991 |
|
RU2005855C1 |
| УПРАВЛЕНИЕ ПРИСПОСОБЛЕНИЕМ ДЛЯ ЗЕМЛЕРОЙНЫХ РАБОТ ВДОЛЬ ПУТИ ИЛИ ТРАЕКТОРИИ | 2016 |
|
RU2705436C2 |
| Экскаватор и его поворотная платформа | 1986 |
|
SU1379412A1 |
| СПОСОБ ДЛЯ ИЗМЕРЕНИЯ УСИЛИЙ В ЗЕМЛЕРОЙНЫХ МАШИНАХ И УПРАВЛЕНИЯ ЭТИМИ МАШИНАМИ, И ЗЕМЛЕРОЙНАЯ МАШИНА, СОДЕРЖАЩАЯ ТАКУЮ СИСТЕМУ | 2019 |
|
RU2808023C2 |
Изобретение относится к системе контроля работы землеройной машины. Техническим результатом является оптимизация динамического движения землеройной машины и снижение вероятности возникновения ошибки оператора. Предложена система для землеройной машины, содержащая систему управления рабочими аспектами землеройной машины; и систему мониторинга, получающую входные сигналы от одного или более датчиков, содержащихся на землеройной машине или в непосредственной близости к ней, при этом система мониторинга выполнена с возможностью определения, находится ли землеройная машина в первом состоянии или во втором состоянии. Причем во время работы, если землеройная машина находится в первом состоянии, тогда система управления позволяет землеройной машине выполнять первое действие; или если землеройная машина находится во втором состоянии, тогда система управления запрещает землеройной машине выполнять первое действие. При этом рабочие аспекты системы управления землеройной машины включают ограничение скорости черпания на основании угла загрузки. 18 з.п. ф-лы, 6 ил.
1. Система для землеройной машины, содержащая:
систему управления рабочими аспектами землеройной машины; и
систему мониторинга, получающую входные сигналы от одного или более датчиков, содержащихся на землеройной машине или в непосредственной близости к ней, при этом система мониторинга выполнена с возможностью определения, находится ли землеройная машина в первом состоянии или во втором состоянии;
причем во время работы, если землеройная машина находится в первом состоянии, тогда система управления позволяет землеройной машине выполнять первое действие; или если землеройная машина находится во втором состоянии, тогда система управления запрещает землеройной машине выполнять первое действие,
при этом рабочие аспекты системы управления землеройной машины включают ограничение скорости черпания на основании угла загрузки.
2. Система по п. 1, в которой рабочие аспекты системы управления землеройной машины включают предотвращение операции поворота в то время, когда машина вынимает грунт.
3. Система по п. 1, в которой первое состояние относится к машине, активно вынимающей грунт, а первым действием является предотвращение поворота машины.
4. Система по п. 1, в которой первое состояние относится к машине, активно вынимающей грунт, а первым действием является предотвращение поворота стрелы или рычага машины.
5. Система по п. 1, в которой первое состояние относится к машине, активно вынимающей грунт, а первым действием является предотвращение передвижения механизма шагающего движения машины.
6. Система по п. 1, в которой система управления дополнительно содержит систему обработки и по меньшей мере один датчик; при этом по меньшей мере один датчик определяет, входит ли ковш в зацепление с пластом.
7. Система по п. 1, в которой рабочие аспекты системы управления землеройной машины включают ограничение скорости, с которой рукоять машины выдвигается или втягивается на основании угла рукояти относительно приблизительного вертикального положения.
8. Система по п. 7, в которой рукоять выдвигается и втягивается двигателем переменного тока, а скоростью выдвижения и втягивания может управлять оператор посредством пользовательского интерфейса системы управления.
9. Система по п. 8, в которой двигатель переменного тока управляет работой рукояти.
10. Система по п. 1, в которой система управления дополнительно содержит систему обработки и по меньшей мере один датчик; система обработки отслеживает один или более входных сигналов, получаемых по меньшей мере от одного датчика, и рассчитывает угол загрузки.
11. Система по п. 1, в которой система управления дополнительно содержит систему обработки и по меньшей мере один датчик; система обработки отслеживает один или более входных сигналов, получаемых по меньшей мере от одного датчика, и рассчитывает угол загрузки.
12. Система по п. 11, в которой система обработки системы управления ограничивает максимальную скорость черпания в качестве функции расчетного угла загрузки.
13. Система по п. 1, в которой рабочие аспекты системы управления землеройной машины включают ограничение скорости лебедки машины.
14. Система по п. 13, в которой система управления дополнительно содержит систему обработки и по меньшей мере один датчик; система обработки отслеживает один или более входных сигналов, получаемых по меньшей мере от одного датчика, и рассчитывает скорость лебедки и груз в землеройном элементе машины.
15. Система по п. 14, в которой система обработки системы управления ограничивает максимальную опускающую скорость лебедки в качестве функции груза в землеройном элементе.
16. Система по п. 14, в которой система обработки системы управления ограничивает максимальную поднимающую скорость лебедки в качестве функции груза в землеройном элементе.
17. Система по п. 1, в которой рабочие аспекты системы управления землеройной машины включают предотвращение остановки работы машины во время работы по выемке грунта.
18. Система по п. 17, в которой система управления дополнительно содержит систему обработки и по меньшей мере один датчик; система обработки отслеживает один или более входных сигналов, получаемых по меньшей мере от одного датчика, и определяет, не собирается ли машина заглохнуть.
19. Система по п. 17, в которой система управления дополнительно содержит систему обработки и по меньшей мере один датчик; система обработки отслеживает один или более входных сигналов, получаемых по меньшей мере от одного датчика, и определяет, не собирается ли машина заглохнуть; входные сигналы по меньшей мере от одного датчика включают уровень напряжения двигателя машины, крутящий момент на рукояти машины, натяжение подъемного каната машины.
| Устройство для управления механизмами подъема и тяги драглайна | 1978 |
|
SU874893A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Устройство защиты стрелы от растяжки ковша экскаватора-драглайна | 1977 |
|
SU777157A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

