ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Настоящая заявка испрашивает приоритет по заявке на патент Китая №2022107729727, озаглавленной «СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ПРОХОДЧЕСКОЙ МАШИНЫ И ПРОХОДЧЕСКАЯ МАШИНА», поданной 30 июня 2022 г, которая полностью включена в настоящий документ путем ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее изобретение относится к технической области механического управления и, в частности, к способу и устройству управления для проходческой машины (т.е. проходческого комбайна) и проходческой машине.
УРОВЕНЬ ТЕХНИКИ
[0003] В настоящее время проходческие машины широко применяются в таких сценариях, как угольные шахты, туннели и городское подземное строительство, и могут выполнять операции резки, погрузки и транспортировки. Однако в известном уровне техники, когда проходческая машина выполняет операцию резки, управление скоростью резки проходческой машины в основном осуществляется в соответствии с опытом работы вручную и, следовательно, скорость резки проходческой машины нестабильная; а поскольку скорость резки может влиять на устройство конвейерной транспортировки материала проходческой машины, часто возникает неисправность устройства конвейерной транспортировки материала проходческой машины, что приводит к снижению эффективности операции резки.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0004] В настоящей заявке предложены способ и устройство управления для проходческой машины, чтобы решить проблемы известного уровня техники, заключающиеся в том, что поскольку скорость резки может влиять на устройство конвейерной транспортировки материала проходческой машины, часто возникает неисправность устройства конвейерной транспортировки материала проходческой машины, что приводит к снижению эффективности операции резки, и тем самым повысить эффективность операции резки.
[0005] В настоящей заявке предложен способ управления для проходческой машины, включающий:
[0006] получение целевой информации по меньшей мере одного устройства конвейерной транспортировки материала проходческой машины, причем целевая информация устройства конвейерной транспортировки материала используется для охарактеризования состояния конвейерной транспортировки материала устройства конвейерной транспортировки материала; и
[0007] управление операцией резки проходческой машины на основе указанной целевой информации по меньшей мере одного устройства конвейерной транспортировки материала.
[0008] В соответствии со способом управления проходческой машиной, предложенным в настоящей заявке, указанная целевая информация по меньшей мере одного устройства конвейерной транспортировки материала включает в себя: текущую скорость вращения второго конвейера и изображение для охарактеризования высоты материала на ленте для конвейерной транспортировки материала второго конвейера; и
[0009] этап управления операцией резки проходческой машины на основе указанной целевой информации по меньшей мере одного устройства конвейерной транспортировки материала включает:
[0010] определение текущего потока подачи ленты для конвейерной транспортировки материала на основе указанных текущей скорости вращения второго конвейера и изображения;
[0011] получение соответствующей текущему потоку подачи скорости перемещения стрелы во время резки на основе заданной соответствующей зависимости между потоком подачи и скоростью перемещения стрелы проходческой машины во время резки; и
[0012] управление стрелой на основе соответствующей текущему потоку подачи скорости перемещения стрелы во время резки.
[0013] В соответствии со способом управления проходческой машиной, предложенным в настоящей заявке, этап определения текущего потока подачи ленты для конвейерной транспортировки материала на основе указанных текущей скорости вращения второго конвейера и изображения включает:
[0014] определение площади текущего сечения подачи перпендикулярно ленте для конвейерной транспортировки материала на основе изображения; и
[0015] определение текущего потока подачи ленты для конвейерной транспортировки материала на основе произведения указанной площади сечения и текущей скорости вращения второго конвейера.
[0016] Способ управления проходческой машиной, предложенный в настоящей заявке, также включает:
[0017] определение, в соответствии с текущими данными по току двигателя для резки, скорости перемещения стрелы во время резки на основе заданной соответствующей зависимости между данными по току двигателя для резки проходческой машины и скоростью перемещения стрелы проходческой машины во время резки; и управление стрелой в соответствии со скоростью перемещения стрелы во время резки согласно текущим данным по току двигателя для резки; и/или
[0018] определение, в соответствии с текущими данными по вибрации проходческой машины, скорости перемещения стрелы во время резки на основе заданной соответствующей зависимости между данными по вибрации проходческой машины и скоростью перемещения стрелы проходческой машины во время резки; и управление стрелой в соответствии со скоростью перемещения стрелы во время резки согласно текущим данным по вибрации проходческой машины; и/или
[0019] определение скорости проходки в соответствии с текущими данными по току двигателя для резки на основе заданной соответствующей зависимости между данными по току двигателя для резки проходческой машины и скоростью проходки; и управление операцией резки проходческой машины в соответствии со скоростью проходки согласно текущим данным по току двигателя для резки; и/или
[0020] определение скорости проходки в соответствии с текущими данными по вибрации проходческой машины на основе заданной соответствующей зависимости между данными по вибрации проходческой машины и скоростью проходки; и управление операцией резки проходческой машины в соответствии со скоростью проходки согласно текущим данным по вибрации проходческой машины.
[0021] Способ управления проходческой машиной, предложенный в настоящей заявке, также включает:
[0022] получение текущего значения параметра по меньшей мере одного целевого устройства и соответствующей текущей скорости изменения этого параметра; при этом по меньшей мере одно целевое устройство включает в себя по меньшей мере одно устройство конвейерной транспортировки материала или двигатель для резки проходческой машины;
[0023] определение целевого значения, соответствующего текущему значению параметра целевого устройства и соответствующей текущей скорости изменения этого параметра, на основе заданной соответствующей зависимости между значением, скоростью изменения и целевым значением параметра целевого устройства; и
[0024] управление целевым устройством на основе целевого значения, соответствующего текущему значению параметра целевого устройства и соответствующей текущей скорости изменения этого параметра.
[0025] В соответствии со способом управления проходческой машиной, предложенным в настоящей заявке, целевая информация по меньшей мере одного устройства конвейерной транспортировки материала включает в себя текущую скорость вращения звездчатого колеса; и
[0026] этап управления операцией резки проходческой машины на основе указанной целевой информации по меньшей мере одного устройства конвейерной транспортировки материала включает:
[0027] выполнение по меньшей мере одной из следующих операций: управление двигателем для резки проходческой машины для приостановки при условии, что текущая скорость вращения звездчатого колеса меньше или равна первому пороговому значению; управление стрелой проходческой машины для приостановки; и управление звездчатым колесом для попеременной работы в прямом направлении и обратном направлении.
[0028] В соответствии со способом управления проходческой машиной, предложенным в настоящей заявке, целевая информация по меньшей мере одного устройства конвейерной транспортировки материала включает в себя текущую скорость вращения первого конвейера; и
[0029] этап управления операцией резки проходческой машины на основе указанной целевой информации по меньшей мере одного устройства конвейерной транспортировки материала включает:
[0030] выполнение по меньшей мере одной из следующих операций: управление двигателем для резки проходческой машины для приостановки при условии, что текущая скорость вращения первого конвейера меньше или равна второму пороговому значению; управление стрелой проходческой машины для приостановки; и управление первым конвейером для попеременной работы в прямом направлении и обратном направлении.
[0031] В настоящей заявке также предложено устройство управления для проходческой машины, содержащее:
[0032] модуль сбора данных, выполненный с возможностью сбора целевой информации по меньшей мере одного устройства конвейерной транспортировки материала проходческой машины, причем целевая информация устройства конвейерной транспортировки материала используется для охарактеризования состояния конвейерной транспортировки материала устройства конвейерной транспортировки материала; и
[0033] модуль управления, выполненный с возможностью управления операцией резки проходческой машины на основе указанной целевой информации по меньшей мере одного устройства конвейерной транспортировки материала.
[0034] В настоящей заявке также предложена проходческая машина, содержащая корпус проходческой машины и контроллер, причем контроллер выполнен с возможностью осуществления способа управления проходческой машиной, как описано в любом из предыдущих абзацев.
[0035] Проходческая машина, предложенная в настоящей заявке, также содержит: первый датчик скорости вращения, и/или второй датчик скорости вращения, и/или третий датчик скорости вращения, и/или датчик вибрации, и/или датчик тока, и/или устройство получения изображений;
[0036] первый датчик скорости вращения выполнен с возможностью получения скорости вращения второго конвейера;
[0037] второй датчик скорости вращения выполнен с возможностью получения скорости вращения звездчатого колеса;
[0038] третий датчик скорости вращения выполнен с возможностью получения скорости вращения первого конвейера;
[0039] датчик вибрации выполнен с возможностью получения данных по вибрации проходческой машины;
[0040] датчик тока выполнен с возможностью получения данных по току двигателя для резки проходческой машины; и
[0041] устройство получения изображений выполнено с возможностью получения изображения для охарактеризования высоты материала на ленте для конвейерной транспортировки материала второго конвейера.
[0042] В настоящей заявке также предложено электронное устройство, содержащее память, процессор и компьютерную программу, хранящуюся в памяти и выполненную с возможностью исполнения на процессоре, который при исполнении программы реализует способ управления проходческой машиной, как упомянуто в любом из предыдущих абзацев.
[0043] В настоящей заявке также предложен некратковременный компьютерочитаемый носитель информации, имеющий хранящуюся на нем компьютерную программу, которая при исполнении процессором реализует способ управления проходческой машиной, как описано в любом из предыдущих абзацев.
[0044] Используя способ управления проходческой машиной, предложенный в настоящей заявке, можно получать целевую информацию, способную характеризовать состояние конвейерной транспортировки материала устройства конвейерной транспортировки материала по меньшей мере одного устройства конвейерной транспортировки материала проходческой машины; операция резки проходческой машины автоматически управляется на основе указанной целевой информации по меньшей мере одного устройства конвейерной транспортировки материала, и управление вручную не требуется, так что степень автоматизации повышается; а состояние конвейерной транспортировки материала устройства конвейерной транспортировки материала может автоматически настраиваться, так что стабильность управления и точность операции резки проходческой машины могут быть улучшены.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0045] Для более четкого описания технических решений в настоящей заявке или известном уровне техники ниже будут кратко представлены прилагаемые чертежи, которые необходимо использовать при описании вариантов реализации или известного уровня техники. Очевидно, что прилагаемые чертежи в последующем описании представляют собой некоторые варианты реализации настоящей заявки, и специалисты в данной области могут также без творческих усилий получить другие прилагаемые чертежи в соответствии с этими прилагаемыми чертежами.
[0046] На Фиг. 1 приведена первая блок-схема, показывающая последовательность операций способа управления проходческой машиной, предложенного в настоящей заявке.
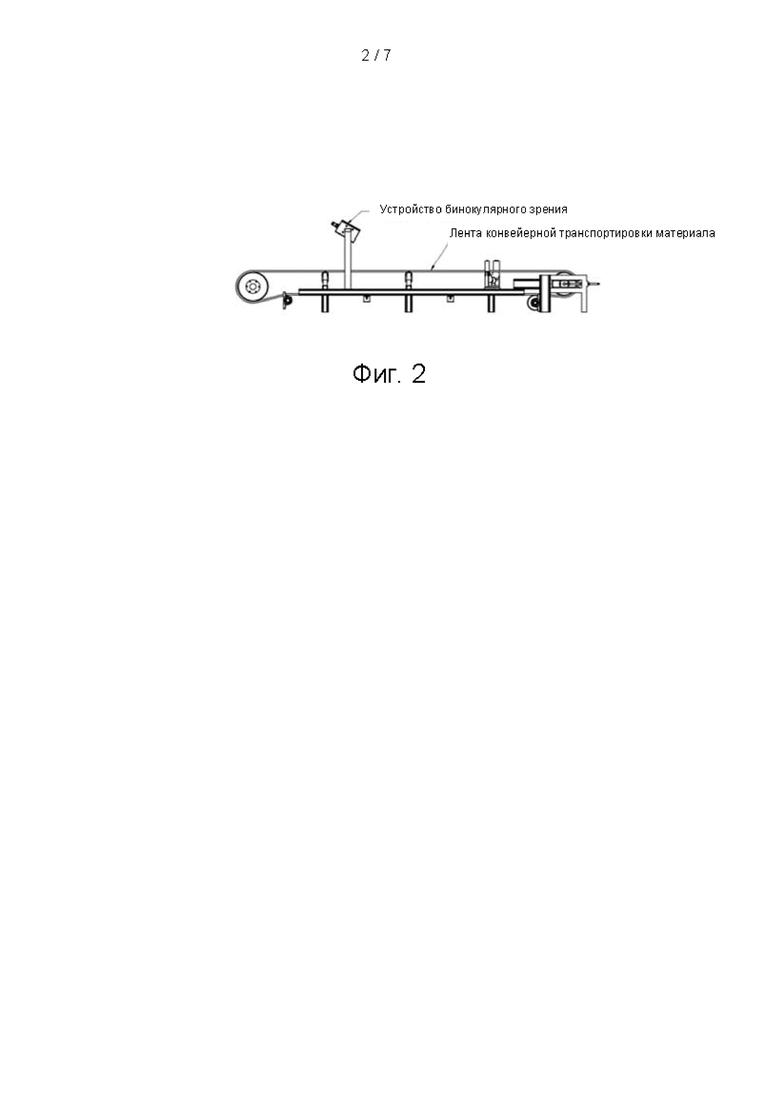
[0047] На Фиг 2 приведено схематическое изображение, показывающее сценарий с устройством бинокулярного зрения, предложенный в настоящей заявке.
[0048] На Фиг. 3 приведена вторая блок-схема, показывающая последовательность операций способа управления проходческой машиной, предложенного в настоящей заявке.
[0049] На Фиг. 4 приведена третья блок-схема, показывающая последовательность операций способа управления проходческой машиной, предложенного в настоящей заявке.
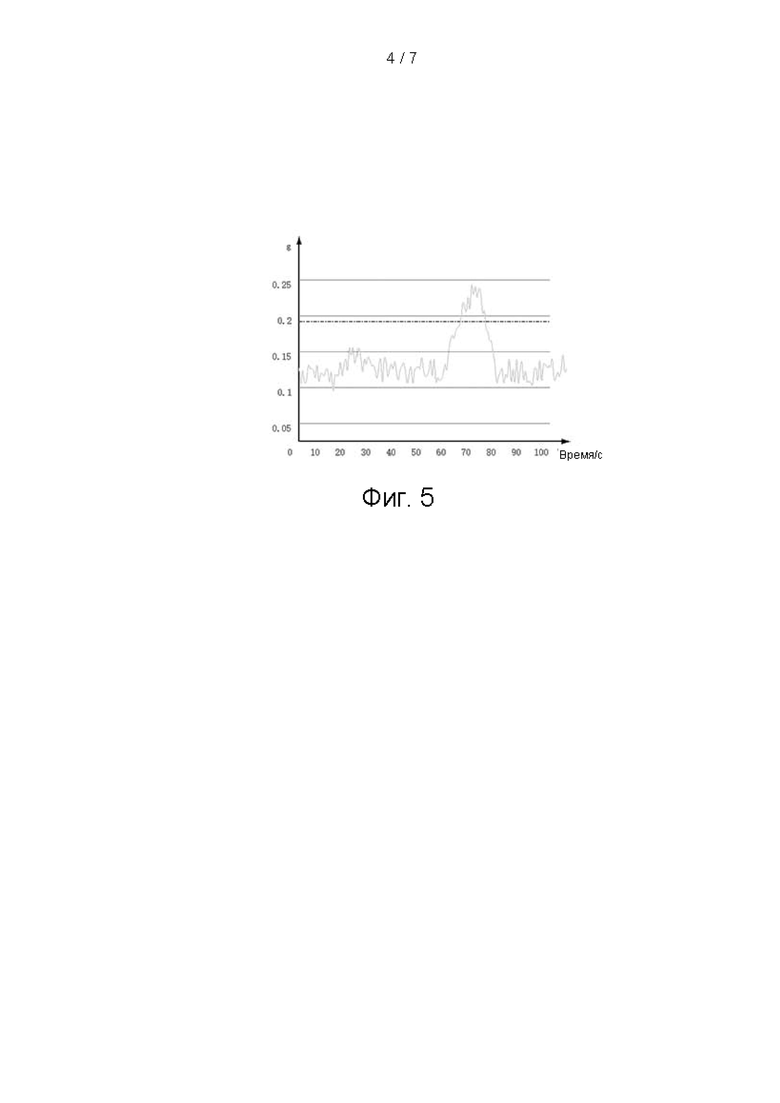
[0050] На Фиг. 5 приведен график, показывающий кривую данных по вибрации, предусмотренных в настоящей заявке.
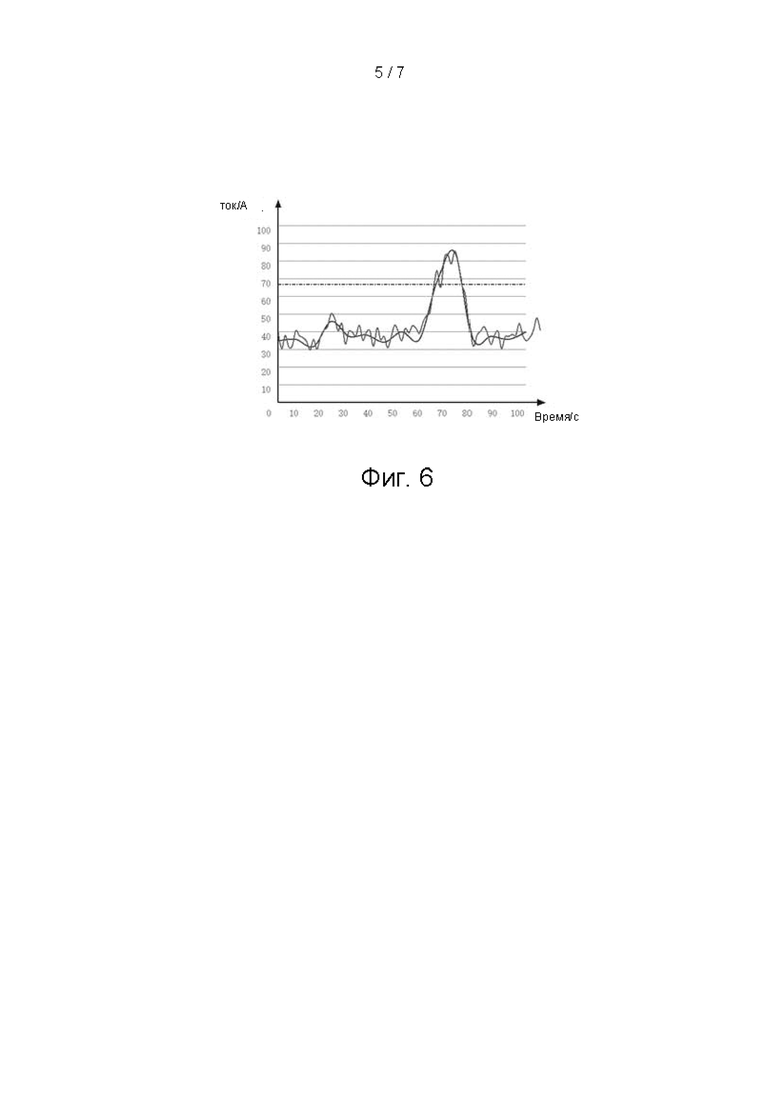
[0051] На Фиг 6 приведен график, показывающий кривую данных по току, предусмотренных в настоящей заявке.
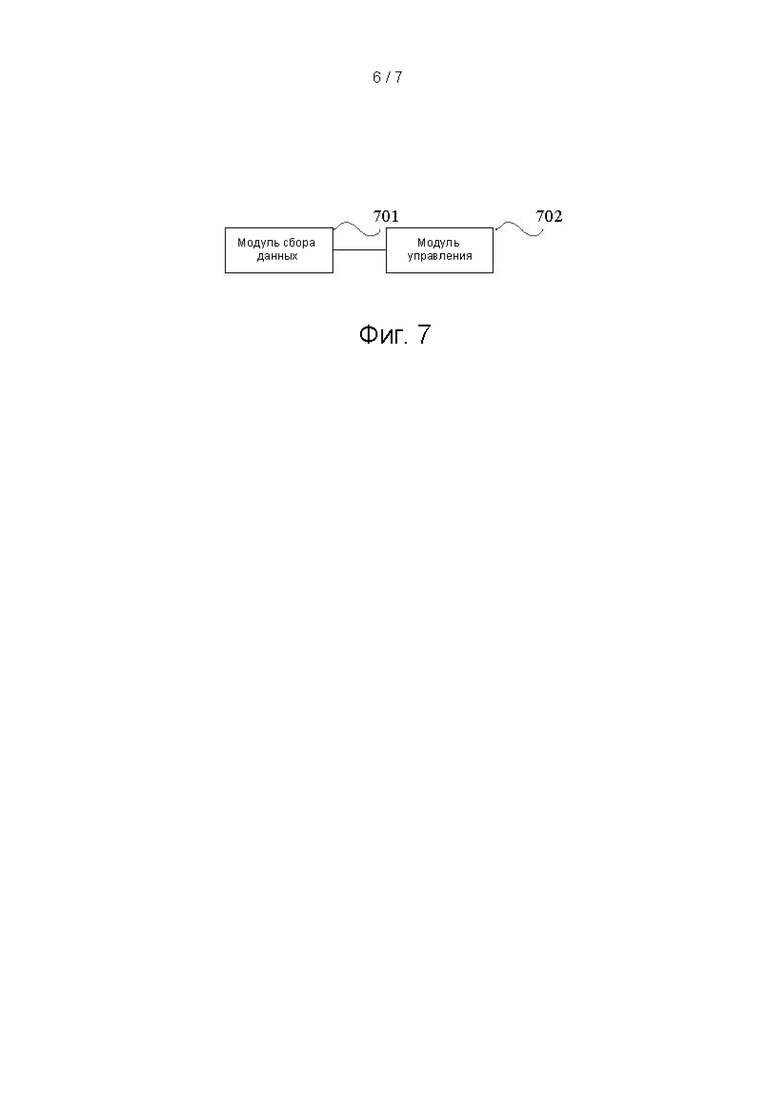
[0052] На Фиг. 7 приведена блок-схема, показывающая структуру устройства управления для проходческой машины, предложенного в настоящей заявке; и
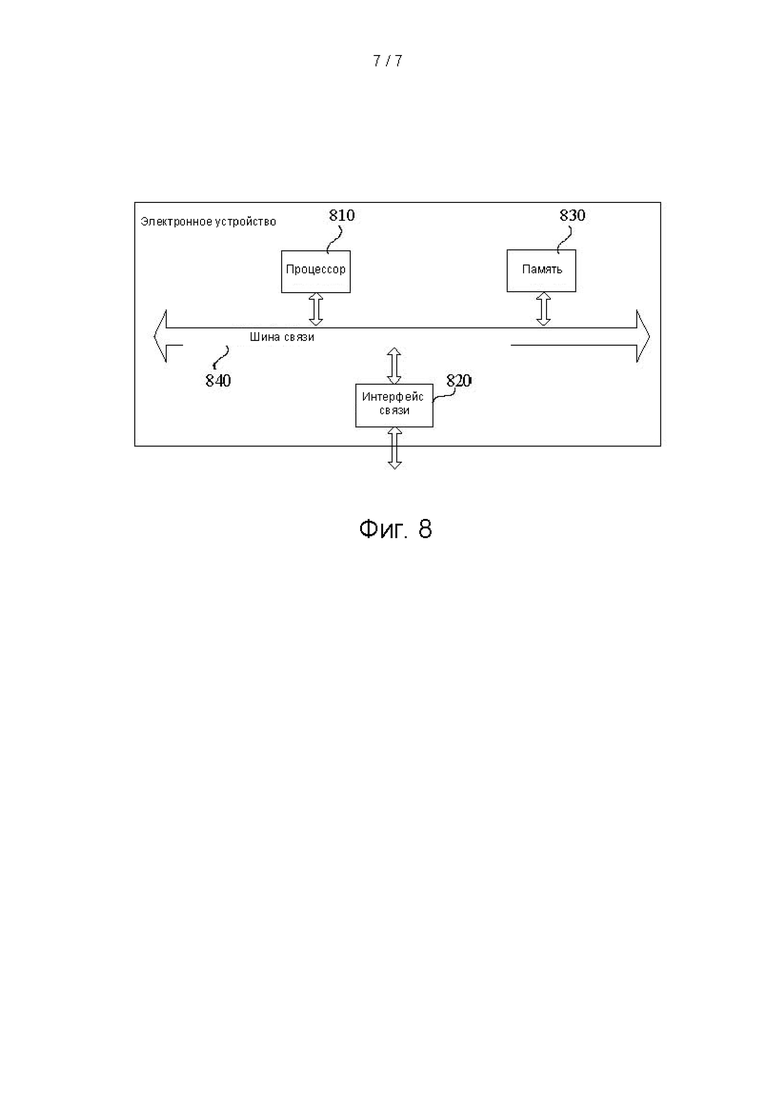
[0053] На Фиг. 8 приведена принципиальная схема, показывающая структуру электронного устройства, предложенного в настоящей заявке.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0054] Для того чтобы сделать задачи, технические решения и преимущества настоящей заявки более ясными, технические решения в настоящей заявке будут четко и полностью описаны ниже в совокупности с прилагаемыми чертежами в настоящей заявке. Очевидно, что описанные варианты реализации являются частью вариантов реализации настоящей заявки, а не всеми вариантами реализации. Все другие варианты реализации, полученные специалистами в данной области на основе вариантов реализации настоящей заявки без творческих усилий, подпадают в объем защиты настоящей заявки.
[0055] В настоящее время проходческие машины широко применяются в таких сценариях, как угольные шахты, туннели и городское подземное строительство, и могут выполнять операции резки, погрузки и транспортировки. Однако в известном уровне техники, когда проходческая машина выполняет операцию резки, управление скоростью резки проходческой машины в основном осуществляется в соответствии с опытом работы вручную и, следовательно, скорость резки проходческой машины нестабильная; а поскольку скорость резки может влиять на устройство конвейерной транспортировки материала проходческой машины, часто возникает неисправность устройства конвейерной транспортировки материала проходческой машины, что приводит к снижению эффективности операции резки.
[0056] Когда проходческая машина выполняет операцию резки, причиной выхода из строя неисправности устройства конвейерной транспортировки материала часто становятся перегрузка, чрезмерный поток материала или застревание материала. Во время операции резки помимо водителя проходческой машины необходимо выделить персонал для наблюдения в режиме реального времени за тем, возникает ли неисправность устройства конвейерной транспортировки материала, и для устранения соответствующей неисправности, поэтому эффективность операции резки низкая.
[0057] С этой целью в настоящей заявке предложен способ управления проходческой машиной, который может быть выполнен проходческой машиной или программным и/или аппаратным обеспечением в ней, например, контроллером в проходческой машине. Благодаря использованию способа управления проходческой машиной эффективность операции резки может быть повышена, что будет подробно описано ниже.
[0058] Настоящий вариант реализации обеспечивает способ управления проходческой машиной, как показано на Фиг. 1, включающий по меньше мере следующие этапы.
[0059] На этапе 101 получают целевую информацию по меньшей мере одного устройства конвейерной транспортировки материала проходческой машины, причем целевая информация устройства конвейерной транспортировки материала используется для охарактеризования состояния конвейерной транспортировки материала устройства конвейерной транспортировки материала.
[0060] На этапе 102 осуществляют управление операцией резки проходческой машины на основе указанной целевой информации по меньшей мере одного устройства конвейерной транспортировки материала.
[0061] Проходческая машина может включать в себя звездчатое колесо, первый конвейер и второй конвейер, а звездчатое колесо может подавать вырубленный материал на первый конвейер и затем разгружать его посредством второго конвейера. Звездчатое колесо, первый конвейер и второй конвейер все представляют собой устройства конвейерной транспортировки материала проходческой машины, и эти устройства конвейерной транспортировки материала могут испытывать воздействия от застревания материала и т.д., что приводит к неисправности устройства конвейерной транспортировки материала, которая может быть вызвана неразумным управлением операцией резки. В настоящем варианте реализации можно получать целевую информацию, способную характеризовать состояние конвейерной транспортировки материала устройства конвейерной транспортировки материала по меньшей мере одного устройства конвейерной транспортировки материала проходческой машины; операция резки проходческой машины автоматически управляется на основе указанной целевой информации по меньшей мере одного устройства конвейерной транспортировки материала, и управление вручную не требуется, так что степень автоматизации повышается; а состояние конвейерной транспортировки материала устройства конвейерной транспортировки материала может автоматически настраиваться, так что стабильность управления и точность операции резки проходческой машины могут быть улучшены.
[0062] При условии, что по меньшей мере одно устройство конвейерной транспортировки материала включает в себя второй конвейер, в примере варианта реализации целевая информация по меньшей мере одного устройства конвейерной транспортировки материала может включать в себя: текущую скорость вращения второго конвейера и изображение для охарактеризования высоты материала на ленте для конвейерной транспортировки материала второго конвейера. В практических применениях может быть предусмотрено устройство получения изображений, причем устройство получения изображений выполнено с возможностью получения изображения для охарактеризования высоты материала на ленте для конвейерной транспортировки материала второго конвейера. Изображение может точно отражать состояние конвейерной транспортировки материала, т.е. находится ли на ленте для конвейерной транспортировки материала больше или меньше материала. Устройство получения изображений может представлять собой, без ограничений, устройство бинокулярного зрения, которое может получать изображение бинокулярного зрения и может получать трехмерную информацию. Конечно, также может быть использовано другое устройство получения изображений, выполненное с возможностью получения трехмерной информации. Как показано на Фиг. 2, за счет размещения, в качестве примера, устройства бинокулярного зрения получают изображение бинокулярного зрения над лентой для конвейерной транспортировки материала второго конвейера, чтобы получить изображение для охарактеризования высоты материала на ленте для конвейерной транспортировки материала второго конвейера.
[0063] Соответственно, изображение представляет собой изображение бинокулярного зрения, а конкретный способ реализации операции резки проходческой машины, управляемой на основе целевой информации по меньшей мере одного устройства конвейерной транспортировки материала, как показано на Фиг. 3, может включать:
[0064] этап 301, на котором определяют текущий поток подачи ленты для конвейерной транспортировки материала на основе указанных текущей скорости вращения второго конвейера и изображения.
[0065] В качестве примера, этап, на котором определяют текущий поток подачи ленты для конвейерной транспортировки материала на основе указанных текущей скорости вращения второго конвейера и изображения, может, в частности, включать:
[0066] этап 1, на котором определяют площадь текущего сечения подачи перпендикулярно ленте для конвейерной транспортировки материала на основе изображения, причем площадь сечения получают на основе интеграла высоты материала верхней точки поверхности на сечении.
[0067] Если в качестве примера взять вышеупомянутое изображение бинокулярного зрения, то с помощью изображения бинокулярного зрения можно получить точку на площади сечения текущей подачи перпендикулярно ленте для конвейерной транспортировки материала, причем высота сечения относительно верхней точки поверхности ленты для конвейерной транспортировки материала может характеризовать высоту материала, и затем интегрировать высоту материала в верхней точке поверхности на сечении, чтобы получить площадь сечения.
[0068] На этапе 2 определяют текущий поток подачи ленты для конвейерной транспортировки материала на основе произведения указанной площади сечения и текущей скорости вращения второго конвейера.
[0069] Объединяя площадь одного сечения со скоростью вращения второго конвейера, можно отразить поток подачи ленты для конвейерной транспортировки материла при скорости вращения второй конвейера, чтобы получить текущий поток подачи ленты для конвейерной транспортировки материала. При реализации скорость вращения второго конвейера может быть получена с помощью первого датчика скорости вращения, расположенного на втором конвейере. Первый датчик скорости вращения может быть датчиком скорости вращения Холла и может получать скорость вращения гидравлического двигателя, соответствующую второму конвейеру.
[0070] В настоящем варианте реализации текущий поток подачи ленты для конвейерной транспортировки материала может быть получен путем обработки одного сечения, причем объем вычислений очень мал, что может удовлетворить требованию выполнения в режиме реального времени.
[0071] Кроме того, в сочетании с текущим потоком подачи ленты для конвейерной транспортировки материала и плотностью материала также может быть реализовано взвешивание, причем значение взвешивания получают на основе произведения текущего потока подачи ленты для конвейерной транспортировки материала и плотности материала.
[0072] На этапе 302 получают соответствующую текущему потоку подачи скорость перемещения стрелы во время резки на основе заданной соответствующей зависимости между потоком подачи и скоростью перемещения стрелы проходческой машины во время резки.
[0073] В практических применениях заданная соответствующая зависимость между потоком подачи и скоростью перемещения стрелы проходческой машины во время резки может быть сконфигурирована в соответствии с фактическими требованиями. Когда поток подачи выше, может возникнуть переполнение материала и застревание материала, так что скорость перемещения стрелы во время резки может быть установлена ниже; а когда поток подачи ниже, скорость перемещения стрелы во время резки может быть установлена выше. При этом скорость перемещения стрелы во время резки может включать в себя скорость поворота стрелы и может также включать в себя скорость подъема стрелы.
[0074] На этапе 303 осуществляют управление стрелой на основе соответствующей текущему потоку подачи скорости перемещения стрелы во время резки.
[0075] В настоящем варианте реализации за счет получения изображения ленты для конвейерной транспортировки материала второго конвейера проходческой машины, скорости вращения второго конвейера и изображения для охарактеризования высоты материала на ленте для конвейерной транспортировки материала второго контейнера получают текущий поток подачи, так что можно точно отразить состояние конвейерной транспортировки материала, т.е. больше материала или меньше материала, на ленте для конвейерной транспортировки материала второго конвейера; и в сочетании с соответствующей зависимостью между текущим потоком подачи материала и скоростью перемещения стрелы проходческой машины во время резки можно определить соответствующую текущему потоку подачи скорость перемещения стрелы во время резки, и на основе этого можно реализовать точное управление стрелой и можно гарантировать высокоэффективную операцию резки без возникновения при этом переполнения материала и других ситуаций.
[0076] При условии, что по меньшей мере одно устройство конвейерной транспортировки материала включает в себя звездчатое колесо, в примере варианта реализации целевая информация по меньшей мере одного устройства конвейерной транспортировки материала включает в себя текущую скорость вращения звездчатого колеса. Соответственно, конкретный способ реализации этапа, на котором осуществляют управление текущим потоком подачи ленты для конвейерной транспортировки материала на основе указанных текущей скорости вращения второго конвейера и изображения, может включать: выполнение по меньшей мере одной из следующих операций: управление двигателем для резки проходческой машины для приостановки при условии, что текущая скорость вращения звездчатого колеса меньше или равна первому пороговому значению; управление стрелой проходческой машины для приостановки; и управление звездчатым колесом для попеременной работы в прямом направлении и обратном направлении.
[0077] Первое пороговое значение может быть установлено в соответствии с фактическими ситуациями и конкретно не определено в настоящем документе.
[0078] В практических применениях при условии, что звездчатое колесо заклинило большим куском материала, т.е. происходит застревание материала, скорость вращения звездчатого колеса будет относительно низкой, и поэтому состояние конвейерной транспортировки материала звездчатого колеса может быть отражено скоростью вращения звездчатого колеса. При реализации текущая скорость вращения звездчатого колеса может быть получена с помощью второго датчика скорости вращения, расположенного на звездчатом колесе. Второй датчик скорости вращения может быть датчиком скорости вращения Холла и может получать скорость вращения гидравлического двигателя, соответствующую звездчатому колесу.
[0079] В настоящем варианте реализации, когда текущая скорость вращения звездчатого колеса меньше или равна первому пороговому значению, считается, что, возможно, произошло застревание материала, и в этот момент управление двигателем для резки проходческой машины может осуществляться для приостановки, и управление стрелой проходческой машины также может осуществляться для приостановки во избежание более серьезного застревания материала; а управление звездчатым колесом также может осуществляться для повторяющейся и попеременной работы в переднем направлении и заднем направлении для автоматического удаления застрявшего материала на звездчатом колесе, чтобы автоматически и быстро расчистить и восстановить канал транспортировки, и эффективность операции резки дополнительно повышается. Конечно, когда текущая скорость вращения звездчатого колеса больше первого порогового значения, можно остановить управление звездчатым колесом для осуществления повторяющейся и попеременной работы в прямом направлении и обратном направлении, снова запустить стрелу проходческой машины или снова запустить мотор для резки проходческой машины, тем самым автоматически восстановить операцию резки.
[0080] В примере варианта реализации целевая информация по меньшей мере одного устройства конвейерной транспортировки материала включает в себя текущую скорость вращения первого конвейера при условии, что по меньшей мере одно устройство конвейерной транспортировки материала включает в себя первый конвейер. Соответственно, конкретный способ реализации этапа, на котором управление операцией резки проходческой машины осуществляют на основе целевой информации по меньшей мере одного устройства конвейерной транспортировки материала, может включать: выполнение по меньшей мере одной из следующих операций: управление двигателем для резки проходческой машины для приостановки при условии, что скорость вращения первого конвейера меньше или равна второму пороговому значению; управление стрелой проходческой машины для приостановки; и управление первым конвейером для попеременной работы в прямом направлении и обратном направлении.
[0081] Второе пороговое значение может быть установлено в соответствии с фактическими ситуациями и конкретно не определено в настоящем документе.
[0082] В практических применениях при условии, что первый конвейер заклинило большим куском материала из-за перегрузки, скорость вращения первого конвейера будет относительно низкой, и поэтому состояние конвейерной транспортировки материала первого конвейера может быть отражено скоростью вращения первого конвейера. Текущая скорость вращения первого конвейера может быть получена с помощью третьего датчика скорости вращения, расположенного на первом конвейере. Третий датчик скорости вращения может быть датчиком скорости вращения Холла и может получать скорость вращения гидравлического двигателя, соответствующую первому конвейеру.
[0083] В настоящем варианте реализации, когда текущая скорость вращения первого конвейера меньше или равна второму пороговому значению, считается, что, возможно, произошло застревание материала, и в этот момент управление двигателем для резки проходческой машины может осуществляться для приостановки, и управление стрелой проходческой машины также может осуществляться для приостановки во избежание более серьезного застревания материала; а управление первым конвейером также может осуществляться для повторяющейся и попеременной работы в переднем направлении и заднем направлении, чтобы автоматически и быстро расчистить и восстановить канал транспортировки, и эффективность операции резки дополнительно повышается. Конечно, когда текущая скорость вращения первого конвейера больше второго порогового значения, можно остановить управление первым конвейером для осуществления повторяющейся и попеременной работы первого конвейера в прямом направлении и обратном направлении, снова запустить стрелу проходческой машины и/или снова запустить мотор для резки проходческой машины, тем самым автоматически восстановить операцию резки.
[0084] В примере варианта реализации способ управления проходческой машиной, предложенный в настоящей заявке, как показано на Фиг. 4, может также включать:
[0085] этап 401, на котором получают текущее значение параметра по меньшей мере одного целевого устройства и соответствующую текущую скорость изменения этого параметра; при этом по меньшей мере одно целевое устройство включает в себя по меньшей мере одно устройство конвейерной транспортировки материала или двигатель для резки проходческой машины;
[0086] В практических применениях по меньшей мере одно целевое устройство проходческой машины может контролироваться, и по меньшей одно целевое устройство может отражать состояние нагрузки проходческой машины. Например, по меньшей одно целевое устройство может включать в себя звездчатое колесо, и может также включать в себя первый конвейер, второй конвейер и двигатель для резки; поэтому этап, на котором получают текущее значение параметра по меньшей мере одного целевого устройства и соответствующую текущую скорость изменения этого параметра, может включать: получение текущей скорости вращения звездчатого колеса и соответствующей скорости ее изменения, или получение текущей скорости вращения первого конвейера и соответствующей скорости ее изменения; или получение текущего потока подачи второго конвейера и соответствующей скорости его изменения, или текущих данных по току двигателя для резки и соответствующей скорости их изменения, или получение текущих данных по вибрации проходческой машины и соответствующей скорости их изменения. Текущая скорость изменения, соответствующая текущему значению параметра целевого устройства, может отражать ситуации с будущим изменением текущего значения параметра. При условии, что скорость изменения относительно большая, может возникнуть состояние перегрузки. Если взять для примера текущую скорость вращения первого конвейера, то при условии, что текущая скорость изменения, соответствующая текущей скорости вращения первого конвейера, относительно большая, то текущая скорость вращения первого конвейера может быстро повыситься, что приведет к перегрузке.
[0087] На этапе 402 определяют целевое значение, соответствующее текущему значению параметра целевого устройства и соответствующей текущей скорости изменения этого параметра, на основе заданной соответствующей зависимости между значением, скоростью изменения и целевым значением параметра целевого устройства.
[0088] На данном этапе создают модель нагрузки проходческой машины, включающую соответствующую зависимость между значением, скоростью изменения и целевым значением параметра каждого целевого устройства в сочетании со временем отклика целевого устройства в соответствии с фактическими требованиями. Целевое значение представляет собой значение параметра, до которого требуется скорректировать. Целевое значение может позволить избежать состояния перегрузки.
[0089] На этапе 403 осуществляют управление целевым устройством на основе целевого значения, соответствующего текущему значению параметра целевого устройства и соответствующей текущей скорости изменения этого параметра.
[0090] Например, звездчатое колесо имеет текущую скорость вращения a и текущую скорость ее изменения b, при этом наблюдается тенденция к быстрому приращению; и чтобы избежать ситуации с перегрузкой звездчатого колеса из-за чрезмерно высокой скорости вращения, скорость вращения звездчатого колеса можно скорректировать до целевого значения.
[0091] В настоящем варианте реализации целевое значение, соответствующее текущему значению параметра целевого устройства и соответствующей текущей скорости его изменения, может быть получено в сочетании с текущим значением параметра целевого устройства и соответствующей текущей скоростью его изменения, а также заданной соответствующей зависимостью между значением, скоростью изменения и целевым значением параметра целевого устройства, чтобы заранее скорректировать целевое устройство до целевого значения во избежание состояния перегрузки, и тогда проходческая машина поддерживается в надлежащем и эффективном режиме резки.
[0092] В примере варианта реализации способ управления проходческой машиной, предложенный в настоящей заявке, может также включать:
[0093] определение, в соответствии с текущими данными по току двигателя для резки, скорости перемещения стрелы во время резки на основе заданной соответствующей зависимости между данными по току двигателя для резки проходческой машины и скоростью перемещения стрелы проходческой машины во время резки; и управление стрелой в соответствии со скоростью перемещения стрелы во время резки согласно текущим данным по току двигателя для резки; и/или
[0094] определение, в соответствии с текущими данными по вибрации проходческой машины, скорости перемещения стрелы во время резки на основе заданной соответствующей зависимости между данными по вибрации проходческой машины и скоростью перемещения стрелы проходческой машины во время резки; и управление стрелой в соответствии со скоростью перемещения стрелы во время резки согласно текущим данным по вибрации проходческой машины; и/или
[0095] определение скорости проходки в соответствии с текущими данными по току двигателя для резки на основе заданной соответствующей зависимости между данными по току двигателя для резки проходческой машины и скоростью проходки; и управление операцией резки проходческой машины в соответствии со скоростью проходки согласно текущим данным по току двигателя для резки; и/или
[0096] определение скорости проходки в соответствии с текущими данными по вибрации проходческой машины на скорости основе заданной соответствующей зависимости между данными по вибрации проходческой машины и скоростью проходки; и управление операцией резки проходческой машины в соответствии со скоростью проходки согласно текущим данным по вибрации проходческой машины.
[0097] При реализации может быть предусмотрен датчик вибрации, причем датчик вибрации выполнен с возможностью получения данных по вибрации, таких как ускорение вибрации, корпуса машины проходческой машины, и на Фиг. 5 показана кривая, иллюстрирующая ускорения вибрации в зависимости от времени, где пунктирная линия показывает значения предварительного предупреждения ускорений вибрации, и при условии превышения значений предварительного предупреждения ускорений вибрации происходит перегрузка. Также может быть предусмотрен датчик тока, причем датчик тока выполнен с возможностью получения данных по току двигателя для резки, и на Фиг. 6 показана кривая, иллюстрирующая зависимость тока от времени, где темная гладкая кривая иллюстрирует эффективные значения, полученные после обработки фактических значений, показанных светлой кривой, и эффективные значения представляют собой эффективные токи для текущей работы, при этом пунктирная линия показывает значения предварительного предупреждения данных по току, и при условии превышения значений предварительного предупреждения данных по току происходит перегрузка. Данные по току в настоящем изобретении могут быть эффективными значениями.
[0098] В практических применениях состояние нагрузки двигателя могут отражать как данные по вибрации, так и данные по току проходческой машины, и поэтому модель нагрузки двигателя для резки может быть создана на основе данных по вибрации и данных по току, при этом модель нагрузки двигателя для резки включает заданную соответствующую зависимость между данными по току двигателя для резки проходческой машины и скоростью перемещения стрелы проходческой машины во время резки, также может включать заданную соответствующую зависимость между данными по вибрации проходческой машины и скоростью перемещения стрелы проходческой машины во время резки, также может включать заданную соответствующую зависимость между данными по току двигателя для резки проходческой машины и скоростью проходки и также может включать заданную соответствующую зависимость между данными по вибрации проходческой машины и скоростью проходки. В настоящем варианте реализации надлежащие скорость проходки и скорость перемещения стрелы во время резки находят с помощью модели нагрузки двигателя для резки в сочетании с текущими данными по току двигателя для резки и текущими данными по вибрации проходческой машины, так что можно избежать перегрузки, чрезмерной вибрации и других ситуаций, и поэтому проходческая машина может поддерживаться в надлежащем и эффективном режиме резки.
[0099] Далее будет описано устройство управления для проходческой машины, предложенное в настоящей заявке, причем устройство управления для проходческой машины, описанное ниже, и способ управления проходческой машиной, описанный выше, могут соответственно ссылаться друг на друга.
[00100] Как показано на Фиг. 7, устройство управления для проходческой машины в соответствии с настоящим вариантом реализации содержит:
[00101] модуль 701 сбора данных, выполненный с возможностью сбора целевой информации по меньшей мере одного устройства конвейерной транспортировки материала проходческой машины, причем целевая информация устройства конвейерной транспортировки материала используется для охарактеризования состояния конвейерной транспортировки материала устройства конвейерной транспортировки материала; и
[00102] модуль 702 управления, выполненный с возможностью управления операцией резки проходческой машины на основе указанной целевой информации по меньшей мере одного устройства конвейерной транспортировки материала.
[00103] В примере варианта реализации указанная целевая информация по меньшей мере одного устройства конвейерной транспортировки материала включает в себя: текущую скорость вращения второго конвейера и изображение для охарактеризования высоты материала на ленте для конвейерной транспортировки материала второго конвейера; и
[00104] модуль управления, в частности, выполнен с возможностью:
[00105] определения текущего потока подачи ленты для конвейерной транспортировки материала на основе указанных текущей скорости вращения второго конвейера и изображения;
[00106] получения соответствующей текущему потоку подачи скорости перемещения стрелы во время резки на основе заданной соответствующей зависимости между потоком подачи и скоростью перемещения стрелы проходческой машины во время резки; и
[00107] управления стрелой на основе соответствующей текущему потоку подачи скорости перемещения стрелы во время резки.
[00108] В одном примере реализации модуль управления, в частности, выполнен с возможностью:
[00109] определения площади текущего сечения подачи перпендикулярно ленте для конвейерной транспортировки материала на основе изображения; и
[00110] определения текущего потока подачи ленты для конвейерной транспортировки материала на основе произведения указанной площади сечения и текущей скорости вращения второго конвейера.
[00111] В одном примере реализации модуль управления также выполнен с возможностью:
[00112] определения, в соответствии с текущими данными по току двигателя для резки, скорости перемещения стрелы во время резки на основе заданной соответствующей зависимости между данными по току двигателя для резки проходческой машины и скоростью перемещения стрелы проходческой машины во время резки; и управления стрелой в соответствии со скоростью перемещения стрелы во время резки согласно текущим данным по току двигателя для резки; и/или
[00113] определения, в соответствии с текущими данными по вибрации проходческой машины, скорости перемещения стрелы во время резки на основе заданной соответствующей зависимости между данными по вибрации проходческой машины и скоростью перемещения стрелы проходческой машины во время резки; и управления стрелой в соответствии со скоростью перемещения стрелы во время резки согласно текущим данным по вибрации проходческой машины; и/или
[00114] определения скорости проходки в соответствии с текущими данными по току двигателя для резки на основе заданной соответствующей зависимости между данными по току двигателя для резки проходческой машины и скоростью проходки; и управления операцией резки проходческой машины в соответствии со скоростью проходки согласно текущим данным по току двигателя для резки; и/или
[00115] определения скорости проходки в соответствии с текущими данными по вибрации проходческой машины на основе заданной соответствующей зависимости между данными по вибрации проходческой машины и скоростью проходки; и управления операцией резки проходческой машины в соответствии со скоростью проходки согласно текущим данным по вибрации проходческой машины.
[00116] В одном примере реализации модуль управления также выполнен с возможностью:
[00117] получения текущего значения параметра по меньшей мере одного целевого устройства и соответствующей текущей скорости изменения этого параметра; при этом по меньшей мере одно целевое устройство включает в себя по меньшей мере одно устройство конвейерной транспортировки материала или двигатель для резки проходческой машины;
[00118] определения целевого значения, соответствующего текущему значению параметра целевого устройства и соответствующей текущей скорости изменения этого параметра, на основе заданной соответствующей зависимости между значением, скоростью изменения и целевым значением параметра целевого устройства; и
[00119] управления целевым устройством на основе целевого значения, соответствующего текущему значению параметра целевого устройства и соответствующей текущей скорости изменения этого параметра.
[00120] В примере варианта реализации целевая информация по меньшей мере одного устройства конвейерной транспортировки материала включает в себя текущую скорость вращения звездчатого колеса; и
[00121] модуль управления, в частности, выполнен с возможностью:
[00122] выполнения по меньшей мере одной из следующих операций: управление двигателем для резки проходческой машины для приостановки при условии, что текущая скорость вращения звездчатого колеса меньше или равна первому пороговому значению; управление стрелой проходческой машины для приостановки; и управление звездчатым колесом для попеременной работы в прямом направлении и обратном направлении.
[00123] В примере варианта реализации целевая информация по меньшей мере одного устройства конвейерной транспортировки материала включает в себя текущую скорость вращения первого конвейера;
[00124] модуль управления, в частности, выполнен с возможностью:
[00125] выполнения по меньшей мере одной из следующих операций: управление двигателем для резки проходческой машины для приостановки при условии, что текущая скорость вращения первого конвейера меньше или равна второму пороговому значению; управление стрелой проходческой машины для приостановки; и управление первым конвейером для попеременной работы в прямом направлении и обратном направлении.
[00126] На основе той же концепции в настоящей заявке предложена проходческая машина, содержащая корпус проходческой машины и контроллер, причем контроллер выполнен с возможностью осуществления способа управления проходческой машиной, как предусмотрено в любом из предыдущих вариантов реализации.
[00127] В примере варианта реализации проходческая машина также может включать в себя: первый датчик скорости вращения, и/или второй датчик скорости вращения, и/или третий датчик скорости вращения, и/или датчик вибрации, и/или датчик тока, и/или устройство получения изображений;
[00128] первый датчик скорости вращения выполнен с возможностью получения скорости вращения второго конвейера;
[00129] второй датчик скорости вращения выполнен с возможностью получения скорости вращения звездчатого колеса;
[00130] третий датчик скорости вращения выполнен с возможностью получения скорости вращения первого конвейера;
[00131] датчик вибрации выполнен с возможностью получения данных по вибрации проходческой машины;
[00132] датчик тока выполнен с возможностью получения данных по току двигателя для резки проходческой машины; и
[00133] устройство получения изображений выполнено с возможностью получения изображения для охарактеризования высоты материала на ленте для конвейерной транспортировки материала второго конвейера.
[00134] Устройство получения изображения может представлять собой устройство бинокулярного зрения.
[00135] На Фиг. 8 приведена принципиальная схема, показывающая физическую структуру электронного устройства, и как показано на Фиг. 8, электронное устройство содержит: процессор 810, интерфейс 820 связи, память 830 и шину 840 связи, причем взаимодействие между процессором 810, интерфейсом 820 связи и памятью 830 осуществляется посредством шины 840 связи. Процессор 810 может обращаться к логическим инструкциям в памяти 830 для выполнения способа управления проходческой машиной, при этом способ включает:
[00136] получение целевой информации по меньшей мере одного устройства конвейерной транспортировки материала проходческой машины, причем целевая информация устройства конвейерной транспортировки материала используется для охарактеризования состояния конвейерной транспортировки материала устройства конвейерной транспортировки материала; и
[00137] управление операцией резки проходческой машины на основе указанной целевой информации по меньшей мере одного устройства конвейерной транспортировки материала.
[00138] Кроме того, логические инструкции в вышеупомянутой памяти 830 могут быть реализованы в форме программных функциональных блоков и могут храниться на компьютерочитаемом носителе информации при продаже или использовании в качестве независимого продукта. Исходя из такого понимания, сущности вышеупомянутых технических решений или их частей, вносящих вклад в известный уровень техники или части технических решений, могут быть воплощены в форме программного продукта, и этот компьютерный программный продукт хранится на носителе информации и содержит инструкции, используемые для того, чтобы вызвать выполнение компьютерным устройством (которое может быть персональным компьютером, сервером или сетевым устройством и т.д.) всех или части этапов способа, описанного в каждом из вариантов реализации настоящей заявки. Вышеупомянутый носитель информации включает различные носители, такие как U-диск, мобильный накопитель на жестком диске, постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ), дискета или оптический диск, выполненные с возможностью хранения программных кодов.
[00139] В соответствии с другим аспектом в настоящей заявке также предложен компьютерный программный продукт, содержащий компьютерную программу, хранящуюся на некратковременном компьютерочитаемом носителе информации, причем когда программные инструкции исполняются компьютером, компьютер может выполнять способ управления проходческой машиной, как предусмотрено в каждом из вышеупомянутых способов, при этом способ включает:
[00140] получение целевой информации по меньшей мере одного устройства конвейерной транспортировки материала проходческой машины, причем целевая информация устройства конвейерной транспортировки материала используется для охарактеризования состояния конвейерной транспортировки материала устройства конвейерной транспортировки материала; и
[00141] управление операцией резки проходческой машины на основе указанной целевой информации по меньшей мере одного устройства конвейерной транспортировки материала.
[00142] В соответствии с другим аспектом в настоящей заявке также предложен некратковременный компьютерочитаемый носитель информации, имеющий хранящуюся на нем компьютерную программу, которая при исполнении процессором реализует способ управления проходческой машиной, как предусмотрено выше, при этом способ включает:
[00143] получение целевой информации по меньшей мере одного устройства конвейерной транспортировки материала проходческой машины, причем целевая информация устройства конвейерной транспортировки материала используется для охарактеризования состояния конвейерной транспортировки материала устройства конвейерной транспортировки материала; и
[00144] управление операцией резки проходческой машины на основе указанной целевой информации по меньшей мере одного устройства конвейерной транспортировки материала.
[00145] Варианты реализации устройства, описанные выше, являются лишь схематичными, при этом блоки, показанные в виде отдельных компонентов, могут быть или не быть физически разделены, компоненты, показанные в виде блоков, могут быть или не быть физическими блоками, т.е. они могут быть расположены в одном месте или также могут быть распределены по множеству сетевых блоков. Некоторые или все модули могут быть выбраны в соответствии с фактическими требованиями для достижения целей настоящих вариантов реализации. Специалисты в данной области могут понять и реализовать их без творческих усилий.
[00146] Из вышеописанных вариантов реализации специалистам в данной области будет ясно, что каждый вариант реализации может быть осуществлен с помощью программного обеспечения и необходимой аппаратной платформы общего назначения, и, конечно, он также может быть реализован с помощью аппаратных средств. Исходя из такого понимания, сущности вышеупомянутых технических решений или их частей, вносящих вклад в известный уровень техники, могут быть воплощены в форме программного продукта, и этот компьютерный программный продукт может хранится на компьютерочитаемом носителе информации, таком как ПЗУ/ОЗУ, дискета и оптический диск, и содержит инструкции, используемые для того, чтобы вызвать выполнение компьютерным устройством (которое может быть персональным компьютером, сервером или сетевым устройством и т.д.) способов во всех вариантах реализации или частях вариантов реализации.
[00147] Наконец, следует отметить, что: вышеупомянутые варианты реализации представляют собой просто иллюстративные технические решения настоящей заявки и не ограничивают ее; хотя настоящая заявка была описана подробно со ссылкой на вышеупомянутые варианты реализации, специалистам в данной области будет понятно, что: технические решения, раскрытые в вышеупомянутых вариантах реализации, также могут быть модифицированы, или некоторые из их технических признаков могут быть заменены эквивалентами; однако эти модификации или замены по своей сути оставляют их в пределах объема и сущности технических решений всех вариантов реализации настоящей заявки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОХОДЧЕСКИЙ АНКЕРОВОЧНЫЙ КОМБАЙН С ШЕСТИСЕКЦИОННОЙ ШТАНГОЙ | 2021 |
|
RU2818774C1 |
| КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВКИ МАТЕРИАЛОВ И ПРОХОДЧЕСКАЯ МАШИНА | 2022 |
|
RU2811051C2 |
| ПРОХОДЧЕСКИЙ КОМБАЙН СО СРЕДСТВОМ ДЛЯ СРЕЗАНИЯ ВЫСТУПОВ | 2018 |
|
RU2768356C2 |
| ГОРНЫЙ ПРОХОДЧЕСКИЙ КОМБАЙН | 2008 |
|
RU2441155C1 |
| ГОРНЫЙ ПРОХОДЧЕСКИЙ КОМБАЙН | 2008 |
|
RU2449123C2 |
| БУРОВЗРЫВНАЯ ПРОХОДЧЕСКАЯ МАШИНА | 2016 |
|
RU2673569C1 |
| Проходческая или добычная машина | 1986 |
|
SU1466659A3 |
| МАШИНА ПРОХОДЧЕСКАЯ | 2010 |
|
RU2442898C2 |
| ТРОС АВАРИЙНОГО ОТКЛЮЧЕНИЯ ДЛЯ КОНВЕЙЕРА | 2019 |
|
RU2769319C1 |
| ПРОХОДЧЕСКИЙ КОМБАЙН | 1997 |
|
RU2131030C1 |
Изобретение относится к управлению проходческой машиной. В способе управления проходческой машиной получают целевую информацию устройства конвейерной транспортировки материала проходческой машины, которая используется для характеристики состояния конвейерной транспортировки материала устройства конвейерной транспортировки материала, и управляют операцией резки проходческой машины на основе указанной целевой информации устройства конвейерной транспортировки материала. Повышается эффективность резки. 3 н. и 7 з.п. ф-лы, 8 ил.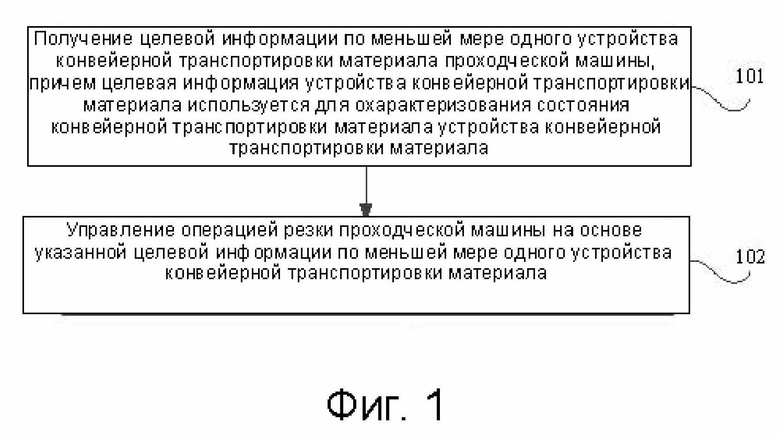
1. Способ управления проходческой машиной, включающий:
получение целевой информации по меньшей мере одного устройства конвейерной транспортировки материала проходческой машины, причем целевая информация устройства конвейерной транспортировки материала используется для охарактеризования состояния конвейерной транспортировки материала устройства конвейерной транспортировки материала; и
управление операцией резки проходческой машины на основе указанной целевой информации по меньшей мере одного устройства конвейерной транспортировки материала.
2. Способ управления проходческой машиной по п. 1, в котором указанная целевая информация по меньшей мере одного устройства конвейерной транспортировки материала содержит: текущую скорость вращения второго конвейера и изображение для охарактеризования высоты материала на ленте для конвейерной транспортировки материала второго конвейера; и
этап управления операцией резки проходческой машины на основе указанной целевой информации по меньшей мере одного устройства конвейерной транспортировки материала включает:
определение текущего потока подачи ленты для конвейерной транспортировки материала на основе указанных текущей скорости вращения второго конвейера и изображения;
получение соответствующей текущему потоку подачи скорости перемещения стрелы во время резки на основе заданной соответствующей зависимости между потоком подачи и скоростью перемещения стрелы проходческой машины во время резки; и
управление стрелой на основе соответствующей текущему потоку подачи скорости перемещения стрелы во время резки.
3. Способ управления проходческой машиной по п. 2, в котором этап определения текущего потока подачи ленты для конвейерной транспортировки материала на основе указанных текущей скорости вращения второго конвейера и изображения включает:
определение площади текущего сечения подачи перпендикулярно ленте для конвейерной транспортировки материала на основе изображения и
определение текущего потока подачи ленты для конвейерной транспортировки материала на основе произведения указанной площади сечения и текущей скорости вращения второго конвейера.
4. Способ управления проходческой машиной по п. 1, также включающий:
определение, в соответствии с текущими данными по току двигателя для резки, скорости перемещения стрелы во время резки на основе заданной соответствующей зависимости между данными по току двигателя для резки проходческой машины и скоростью перемещения стрелы проходческой машины во время резки; и управление стрелой в соответствии со скоростью перемещения стрелы во время резки согласно текущим данным по току двигателя для резки; и/или
определение, в соответствии с текущими данными по вибрации проходческой машины, скорости перемещения стрелы во время резки на основе заданной соответствующей зависимости между данными по вибрации проходческой машины и скоростью перемещения стрелы проходческой машины во время резки; и управление стрелой в соответствии со скоростью перемещения стрелы во время резки согласно текущим данным по вибрации проходческой машины; и/или
определение скорости проходки в соответствии с текущими данными по току двигателя для резки на основе заданной соответствующей зависимости между данными по току двигателя для резки проходческой машины и скоростью проходки; и управление операцией резки проходческой машины в соответствии со скоростью проходки согласно текущим данным по току двигателя для резки; и/или
определение скорости проходки в соответствии с текущими данными по вибрации проходческой машины на основе заданной соответствующей зависимости между данными по вибрации проходческой машины и скоростью проходки; и управление операцией резки проходческой машины в соответствии со скоростью проходки согласно текущим данным по вибрации проходческой машины.
5. Способ управления проходческой машиной по п. 1, также включающий:
получение текущего значения параметра по меньшей мере одного целевого устройства и соответствующей текущей скорости изменения этого параметра; при этом по меньшей мере одно целевое устройство включает в себя по меньшей мере одно устройство конвейерной транспортировки материала или двигатель для резки проходческой машины;
определение целевого значения, соответствующего текущему значению параметра целевого устройства и соответствующей текущей скорости изменения этого параметра, на основе заданной соответствующей зависимости между значением, скоростью изменения и целевым значением параметра целевого устройства; и
управление целевым устройством на основе целевого значения, соответствующего текущему значению параметра целевого устройства и соответствующей текущей скорости изменения этого параметра.
6. Способ управления проходческой машиной по любому из пп. 1–5, в котором целевая информация по меньшей мере одного устройства конвейерной транспортировки материала содержит текущую скорость вращения звездчатого колеса; и
этап управления операцией резки проходческой машины на основе указанной целевой информации по меньшей мере одного устройства конвейерной транспортировки материала включает:
выполнение по меньшей мере одной из следующих операций: управление двигателем для резки проходческой машины для приостановки при условии, что текущая скорость вращения звездчатого колеса меньше или равна первому пороговому значению; управление стрелой проходческой машины для приостановки; и управление звездчатым колесом для попеременной работы в прямом направлении и обратном направлении.
7. Способ управления проходческой машиной по любому из пп. 1–5, в котором целевая информация по меньшей мере одного устройства конвейерной транспортировки материала содержит текущую скорость вращения первого конвейера; и
этап управления операцией резки проходческой машины на основе указанной целевой информации по меньшей мере одного устройства конвейерной транспортировки материала включает:
выполнение по меньшей мере одной из следующих операций: управление двигателем для резки проходческой машины для приостановки при условии, что текущая скорость вращения первого конвейера меньше или равна второму пороговому значению; управление стрелой проходческой машины для приостановки; и управление первым конвейером для попеременной работы в прямом направлении и обратном направлении.
8. Устройство управления для проходческой машины, содержащее:
модуль сбора данных, выполненный с возможностью сбора целевой информации по меньшей мере одного устройства конвейерной транспортировки материала проходческой машины, причем целевая информация устройства конвейерной транспортировки материала используется для охарактеризования состояния конвейерной транспортировки материала устройства конвейерной транспортировки материала; и
модуль управления, выполненный с возможностью управления операцией резки проходческой машины на основе указанной целевой информации по меньшей мере одного устройства конвейерной транспортировки материала.
9. Проходческая машина, содержащая корпус проходческой машины и контроллер, причем контроллер выполнен с возможностью осуществления способа управления проходческой машиной по любому из пп. 1–7.
10. Проходческая машина по п. 9, также содержащая: первый датчик скорости вращения, и/или второй датчик скорости вращения, и/или третий датчик скорости вращения, и/или датчик вибрации, и/или датчик тока, и/или устройство получения изображений;
первый датчик скорости вращения выполнен с возможностью получения скорости вращения второго конвейера;
второй датчик скорости вращения выполнен с возможностью получения скорости вращения звездчатого колеса;
третий датчик скорости вращения выполнен с возможностью получения скорости вращения первого конвейера;
датчик вибрации выполнен с возможностью получения данных по вибрации проходческой машины;
датчик тока выполнен с возможностью получения данных по току двигателя для резки проходческой машины и
устройство получения изображений выполнено с возможностью получения изображения для охарактеризования высоты материала на ленте для конвейерной транспортировки материала второго конвейера.
| Способ отделения твердых углеводов от жидких путем центрофугирования | 1927 |
|
SU34425A1 |
| СИСТЕМА ГОРНОПРОХОДЧЕСКИХ МАШИН | 1997 |
|
RU2144139C1 |
| Видоизменение мартеновской печи с воздушным охлаждением свода и головок | 1927 |
|
SU16685A1 |
| СПОСОБ ПОГРУЗКИ ГОРНОЙ МАССЫ ПРИ ПРОХОДКЕ ГОРНЫХ ВЫРАБОТОК И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2200845C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ МАТЕРИАЛА ДЛЯ ГОРНОГО КОМБАЙНА | 2018 |
|
RU2762678C1 |
| СИСТЕМА ГОРНОЙ РАЗРАБОТКИ С НЕПРЕРЫВНЫМ ИЗВЛЕЧЕНИЕМ | 2011 |
|
RU2577867C2 |
| Горный комбайн | 2020 |
|
RU2744123C1 |
| ПРОХОДКИ ТОННЕЛЕЙ В СЫПУЧИХ ГРУНТАХ | 0 |
|
SU267670A1 |
| КОМПЛЕКС ДЛЯ ОТКРЫТОЙ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ И СПОСОБ ЕГО РАБОТЫ | 2020 |
|
RU2774885C1 |
| АВТОМАТИЗИРОВАННЫЕ ОПЕРАЦИИ ГОРНОЙ МАШИНЫ | 2012 |
|
RU2617498C2 |
| Н.Я | |||
| РЕПИН И ДР | |||
| "ПЕРЕМЕЩЕНИЕ И СКЛАДИРОВАНИЕ ГОРНЫХ ПОРОД" МОСКВА, ИЗД | |||

