Область техники, к которой относится изобретение
Настоящее изобретение относится к комплексу для открытой добычи полезных ископаемых, включающему ведущую систему открытой добычи и сопровождающую систему открытой добычи, а также к способу работы такого комплекса для открытой добычи полезных ископаемых.
Уровень техники
Комплекс для открытой добычи и способ работы такого комплекса для открытой добычи известны из патентного документа EP 2707547 B1. Дополнительные модификации описаны в патентных документах EP 2 707 547 B1, EP 2 540 589 A2 и DE 10 2011 106 342 A1.
Раскрытие изобретения
Задача настоящего изобретения заключается в создании комплекса для открытой добычи полезных ископаемых с признаками ограничительной части пункта 1 формулы изобретения и способа работы с признаками ограничительной части независимого пункта формулы, относящегося к способу, которые (комплекс и способ его работы) способны снизить риск возникновения ошибок во время работы комплекса для открытой добычи.
Эта задача достигается с помощью комплекса для открытой добычи с отличительными признаками, указанными в п. 1 формулы изобретения, и с помощью способа с отличительными признаками, указанными в независимом пункте формулы, относящемся к способу работы. Предпочтительные варианты осуществления представлены в зависимых пунктах формулы изобретения, приведенном ниже описании и на прилагаемых чертежах.
Комплекс для открытой добычи согласно настоящему изобретению содержит:
- ведущую систему открытой добычи;
- сопровождающую систему открытой добычи;
- по меньшей мере первый датчик; и
- контроллер с обратной связью для обработки данных;
Ведущая система открытой добычи может извлекать, принимать и/или разгружать сыпучую добываемую породу. Сопровождающая система открытой добычи может переносить сыпучую добываемую породу с и/или на ведущую систему открытой добычи.
Ведущая система открытой добычи может перемещаться по земле в любом направлении. Сопровождающая система открытой добычи может перемещаться относительно ведущей системы открытой добычи по меньшей мере в одном направлении по земле.
По меньшей мере один компонент сопровождающей системы открытой добычи может перемещаться посредством первого регулируемого параметра и, при необходимости, с помощью по меньшей мере одного дополнительного регулируемого параметра. Первый датчик и, при необходимости, по меньшей мере один дополнительный датчик, могут измерять по меньшей мере одну величину, которая коррелирует с положением, расстоянием, ориентацией и/или перемещением сопровождающей системы открытой добычи относительно ведущей системы открытой добычи. Контроллер с обратной связью может производить регулирование первого регулируемого параметра и, при необходимости, по меньшей мере одного дополнительного регулируемого параметра. Для этого регулирования контроллер с обратной связью использует по меньшей мере одно измеряемое значение, измеряемое первым датчиком и, при необходимости, дополнительным датчиком. Контроллер с обратной связью автоматически регулирует первый регулируемый параметр и, при необходимости, дополнительный регулируемый параметр, таким образом, чтобы сопровождающая система открытой добычи отслеживала перемещение ведущей системы открытой добычи. Цель использования элемента с обратной связью в регулировании заключается в том, чтобы сопровождающая система открытой добычи отслеживала перемещения ведущей системы открытой добычи, таким образом, чтобы обеспечивался непрерывный поток добываемой породы с ведущей системы открытой добычи к сопровождающей системе открытой добычи и/или с сопровождающей системы открытой добычи к ведущей системе открытой добычи.
Как правило, управление ведущей системой открытой добычи осуществляется оператором. В частности, оператор осуществляет управление ведущей системой открытой добычи таким образом, что приемное устройство ведущей системы открытой добычи следует за забоем и обеспечивает удаление добываемой породы из данного забоя или отвала. Сопровождающая система открытой добычи должна отслеживать перемещения ведущей системы открытой добычи таким образом, чтобы обеспечивался непрерывный поток добываемой породы лишь с незначительными потерями добываемой породы при её передаче. Настоящим изобретением обеспечивается, что каждый компонент сопровождающей системы открытой добычи, положение или ориентация которого влияет на вышеупомянутый поток добываемой породы, отслеживает перемещения ведущей системы открытой добычи. Таким образом, достигается желаемый непрерывный поток добываемой породы.
Благодаря настоящему изобретению, не требуется, чтобы сопровождающая система открытой добычи была механически связана с ведущей системой открытой добычи, так чтобы сопровождающая система открытой добычи отслеживала перемещения ведущей системы открытой добычи. Такое механическое соединение часто вообще невозможно или является нежелательным.
В одной конфигурации комплекс для открытой добычи дополнительно к первому датчику содержит по меньшей мере второй датчик. Сопровождающая система открытой добычи содержит соединительный компонент и ведомый компонент открытой добычи. Комплекс для открытой добычи может переносить сыпучую добываемую породу с ведущей системы открытой добычи на ведомый компонент открытой добычи и/или с ведомого компонента открытой добычи на ведущую систему открытой добычи. Этот перенос может осуществляться с помощью соединительного компонента, создающего "мост" между ведущей системой открытой добычи и ведомым компонентом открытой добычи. Предпочтительно, ведущая система открытой добычи, соединительный компонент и ведомый компонент открытой добычи механически не соединены друг с другом.
Соединительный компонент может перемещаться относительно ведущей системы открытой добычи по меньшей мере в одном направлении по земле. Соединительный компонент может перемещаться посредством первого регулируемого параметра. Ведомый компонент открытой добычи может перемещаться относительно соединительного компонента по меньшей мере в одном направлении по земле. Ведомый компонент открытой добычи может изменяться посредством второго регулируемого параметра.
Первый датчик может измерять величину, которая коррелирует с положением, расстоянием, ориентацией и/или перемещением соединительного компонента относительно ведущей системы открытой добычи. Второй датчик может измерять величину, которая коррелирует с положением, расстоянием, ориентацией и/или перемещением ведомого компонента открытой добычи относительно соединительного компонента. Контроллер может также регулировать оба регулируемые параметра и для этого обрабатывать значения, измеренные обоими датчиками. Контроллер может регулировать первый регулируемый параметр таким образом, чтобы соединительный компонент отслеживал перемещение ведущей системы открытой добычи. Контроллер с обратной связью может регулировать второй регулируемый параметр таким образом, чтобы ведомый компонент открытой добычи отслеживал перемещения соединительного компонента. Цель применения элемента с обратной связью в этом процессе регулирования также заключается в том, чтобы обеспечить непрерывный поток добываемой породы, в рассматриваемой конфигурации – поток породы от ведущей системы открытой добычи через соединительный компонент к ведомому компоненту открытой добычи и/или от ведомого компонента открытой добычи через соединительный компонент к ведущей системе открытой добычи.
В возможном варианте реализации данной конфигурации соединительный компонент содержит первое соединительное устройство и второе соединительное устройство. Комплекс для открытой добычи может переносить добываемую породу от ведущей системы открытой добычи через первое соединительное устройство и затем через второе соединительное устройство к ведомому компоненту открытой добычи и/или, наоборот, от ведомого компонента открытой добычи через второе соединительное устройство и затем через первое соединительное устройство к ведущей системе открытой добычи. Первое соединительное устройство может перемещаться относительно ведущей системы открытой добычи по меньшей мере в одном направлении по земле, второе соединительное устройство может перемещаться относительно первого соединительного устройства, и ведомый компонент открытой добычи может перемещаться относительно второго соединительного устройства. Ведущая система открытой добычи, два соединительных устройства и ведомый компонент открытой добычи могут перемещаться независимо друг от друга и, предпочтительно, не соединены друг с другом. В данном варианте реализации контроллер с обратной связью может регулировать по меньшей мере три регулируемых параметра. Регулированием первого регулируемого параметра контроллером с обратной связью обеспечивается отслеживание первым соединительным устройством перемещения ведущей системы открытой добычи. Регулированием второго регулируемого параметра контроллером с обратной связью обеспечивается отслеживание ведомым компонентом открытой добычи перемещения второго соединительного устройства. Регулированием третьего регулируемого параметра контроллером с обратной связью обеспечивается отслеживание вторым соединительным устройством перемещения первого соединительного устройства.
Конфигурация с двумя соединительными устройствами повышает гибкость комплекса для открытой добычи во многих применениях. Она лучше может адаптироваться к имеющимся ограничительным условиям, например, к географическим условиям.
В одной возможной конфигурации ведущая система открытой добычи и сопровождающая система открытой добычи, соответственно, содержат по меньшей мере по одному конвейерному устройству. Одно конвейерное устройство является разгрузочным конвейерным устройством, другое конвейерное устройство является принимающим конвейерным устройством, которое может принимать добываемую породу с разгрузочного конвейерного устройства. Во время передачи сыпучая добываемая порода падает с разгрузочного конвейерного устройства на принимающее конвейерное устройство. Первый датчик может измерять значение, соответствующее положению принимающего конвейерного устройства относительно разгрузочного конвейерного устройства. Контроллер с обратной связью может регулировать первый регулируемый параметр таким образом, чтобы сопровождающая система открытой добычи отслеживала перемещение ведущей системы открытой добычи, а именно, в данной конфигурации – таким образом, чтобы разгрузочное конвейерное устройство всегда находилось над принимающим конвейерным устройством. Этим обеспечивается, что лишь небольшая часть добываемой породы падает на землю мимо принимающего конвейерного устройства и оказывается потерянной.
Возможны различные конфигурации и варианты использования комплекса для открытой добычи согласно предлагаемому решению, и, следовательно, двух систем открытой добычи.
Ведущая система открытой добычи содержит, например, добывающее устройство, разгрузочный ленточный конвейер и/или бункер. Добывающим устройством является, в частности, приводное ковшовое колесо роторного многоковшового экскаватора. Разгрузочный ленточный конвейер относится, в частности, к отвалообразователю, который может разгружать добываемую породу, в частности, избыточную, или откладывать её каким-либо иным способом. Бункер является, в частности, компонентом передвижной дробилки, который может принимать и измельчать сыпучую добываемую породу.
Сопровождающая система открытой добычи содержит, например, подвижное конвейерное устройство, подвижный лоток и/или ленточный перегружатель. Подвижное конвейерное устройство может передавать сыпучую добываемую породу и может перемещаться по земле. Подвижное конвейерное устройство может быть выполнено, например, в виде самоходного перегружателя или транспортно-отвального моста. Подвижный лоток может направлять сыпучую добываемую породу на отводящее устройство, причем отводящее устройство не обязательно является компонентом сопровождающей системы открытой добычи. Подвижный лоток, в частности, является компонентом саморазгружающейся вагонетки. Ленточный перегружатель может принимать и/или разгружать сыпучую добываемую породу, например, на конвейерное устройство соединительного компонента.
Предпочтительно, по меньшей мере один компонент сопровождающей системы открытой добычи может перемещаться относительно ведущей системы открытой добычи не только по меньшей мере в одном направлении по земле, но и по меньшей мере в одном направлении перпендикулярно поверхности земли или под углом к поверхности земли. Первый датчик или дополнительный датчик может измерять значение параметра, который изменяется во время такого перемещения. Контроллер с обратной связью может производить регулирование первого регулируемого параметра или дополнительного регулируемого параметра таким образом, что сопровождающая система открытой добычи отслеживает перемещение ведущей системы открытой добычи таким образом, что подвижный компонент сопровождающей системы открытой добычи перемещается относительно ведущей системы открытой добычи перпендикулярно земле или под углом к поверхности земли, в результате чего обеспечивается непрерывный поток добываемой породы.
В одной возможной конфигурации комплекс для открытой добычи содержит приемную систему. Приемная система содержит приемное устройство, соединительно-передающее устройство и отводящее конвейерное устройство. В качестве приемной системы может использоваться, в частности, роторный многоковшовый экскаватор или передвижная дробилка. Приемным устройством является, например, приводное ковшовое колесо роторного экскаватора или бункер передвижной дробилки. С помощью приемного устройства приемная система может получать, например, извлекать путем выкапывания, добываемую породу. С помощью соединительно-передающего устройства приемная система может переносить полученную добываемую породу на отводящее конвейерное устройство. С помощью отводящего конвейерного устройства приемная система может отводить добываемую породу, например, на компонент сопровождающей системы открытой добычи.
Отводящее конвейерное устройство может перемещаться относительно соединительно-передающего устройства приемной системы. В частности, оно может поворачиваться относительно горизонтальной оси и/или вертикальной оси. Первый датчик может измерять величину, которая коррелирует с положением, расстоянием, ориентацией и/или перемещением отводящего конвейерного устройства относительно соединительно-передающего устройства. Контроллер с обратной связью может регулировать первый регулируемый параметр таким образом, чтобы отводящее конвейерное устройство отслеживало перемещение соединительно-передающего устройства, а точнее, таким образом, чтобы обеспечивался непрерывный поток добываемой породы от соединительно-передающего устройства к отводящему конвейерному устройству. Для этого регулирования контроллер с обратной связью может использовать по меньшей мере одно значение, измеренное первым датчиком и, при необходимости, значение, измеренное дополнительным датчиком.
Согласно предлагаемому техническому решению, контроллер с обратной связью для обработки данных регулирует дополнительный регулируемый параметр или каждый дополнительный регулируемый параметр с целью перемещения сопровождающей системы открытой добычи. Этот контроллер с обратной связью может представлять собой одно устройство или быть распределенным между несколькими устройствами, расположенными на расстоянии друг от друга. В случае ряда устройств эти устройства, предпочтительно, соединены друг с другом с помощью проводной или беспроводной связи. Контроллер с обратной связью может быть установлен на ведущей системе открытой добычи или на сопровождающей системе открытой добычи. В случае нескольких устройств контроллер с обратной связью может быть распределен между обеими системами.
Контроллер с обратной связью может также автоматически использовать аналитическую модель процесса, описывающую, в частности, положение и/или ориентацию по меньшей мере одного подвижного компонента сопровождающей системы открытой добычи относительно ведущей системы открытой добычи. После перемещения ведущей системы открытой добычи контроллер с обратной связью автоматически получает из этой аналитической модели процесса требуемое перемещение подвижного компонента, которое обеспечивает непрерывный поток добываемой породы. Из этого требуемого перемещения контроллер с обратной связью автоматически выводит необходимое управляющее воздействие для первого регулируемого параметра и, при необходимости, по меньшей мере для одного дополнительного регулируемого параметра, и соответствующим образом производит регулирование этих регулируемых параметров.
В предпочтительном варианте реализации изобретения, наоборот, контроллер с обратной связью выполнен в виде контроллера на основе принятых правил или содержит такой контроллер на основе принятых правил. Контроллер на основе принятых правил может автоматически выполнять ряд установленных оцениваемых с помощью компьютера правил (правил "если - то"). Каждое правило содержит исходное условие и по меньшей мере одно заключение. Исходное условие правила является либо одиночным исходным условием, либо логической комбинацией нескольких одиночных исходных условий. Каждое одиночное исходное условие, соответственно, относится к датчику и определяет диапазон возможных значений величины, измеряемой этим датчиком. Различные одиночные исходные условия правила могут относиться к разным датчикам, а также к датчикам для разных компонентов комплекса для открытой добычи. Одиночное исходное условие может также относиться к возможному рабочему состоянию комплекса для открытой добычи. Как правило, одиночные исходные условия ряда различных правил относятся к одному и тому же датчику. В зависимости от фактического значения, т.е. значения, измеренного данным датчиком, а также, возможно, от текущего рабочего состояния, одиночное исходное условие в системе управления с обратной связью может быть по меньшей мере либо выполненным, либо не выполненным.
Заключение правила или каждое заключение правила, соответственно, относится к регулируемому параметру, с помощью которого может быть перемещен компонент сопровождающей системы открытой добычи. Каждое заключение определяет возможное управляющее воздействие для этого регулируемого параметра. Контроллер с обратной связью может инициировать управляющее воздействие или каждое управляющее воздействие, определяемое заключением или каждым заключением правила. Контроллер с обратной связью выполнен таким образом, что он инициирует управляющее воздействие или каждое управляющее воздействие заключения правила, если выполняется одиночное исходное условие или логическая комбинация одиночных исходных условий данного правила.
Такая конфигурация с контроллером на основе принятых правил устраняет необходимость получения аналитической модели процесса, описывающей возможные положения и ориентации подвижных компонентов сопровождающей системы открытой добычи относительно ведущей системы открытой добычи. В некоторых случаях получение такой модели процесса требует много времени, в частности, когда эта модель процесса должна описывать все возможные перемещения. Однако контроллер с обратной связью может одновременно использовать как набор правил, так и аналитическую модель процесса.
Правила понятны разработчику и, следовательно, могут быть получены и адаптированы сравнительно легко.
В одной возможной конфигурации при реализации системы управления с обратной связью каждое одиночное исходное условие правила либо выполняется, либо не выполняется, в зависимости от того, находится или не находится измеряемое датчиком значение в диапазоне, определяемом одиночным исходным условием.
В другой конфигурации по меньшей мере одно одиночное исходное условие правила определяет так называемое нечеткое множество, так что это правило является так называемым нечетким правилом. Это нечеткое множество одиночного исходного условия, соответственно, присваивает степень принадлежности каждому возможному измеренному датчиком значению, к которому относится данное одиночное исходное условие. Предпочтительно, эта степень принадлежности может быть не только максимальной степенью принадлежности (когда измеряемое датчиком значение полностью попадает в определенный интервал) или минимальной степенью принадлежности (когда измеряемое датчиком значение совсем не попадает в определяемый интервал), но и промежуточной степенью принадлежности.
При работе системы управления с обратной связью контроллер с обратной связью может вычислять, соответственно, для каждого одиночного исходного условия, степень принадлежности, которая зависит от значения, измеренного датчиком, к которому относится данное исходное условие, и от диапазона нечеткого множества, определяемого этим одиночным исходное условием. Кроме того, контроллер с обратной связью может вычислять, соответственно, для каждого исходного условия, степень выполнения данного исходного условия, которая зависит от степеней принадлежности одиночных исходных условий.
Кроме того, контроллер с обратной связью может вычислять по меньшей мере одно управляющее воздействие, соответственно, для регулируемого параметра или каждого регулируемого параметра, который может перемещать компонент сопровождающей системы открытой добычи. Как уже было указано, заключение правила или каждое заключение правила, соответственно, относится к регулируемому параметру. Заключения разных правил могут относиться к одному и тому же регулируемому параметру. Вычисленное управляющее воздействие зависит от тех заключений, которые относятся к регулируемому параметру, а также от расчетной степени выполнения исходных условий этих правил.
Конфигурация с нечеткими множествами устраняет необходимость при установке правил обеспечивать жесткие переходы между различными диапазонами возможных значений одного и того же датчика. Во многих случаях нечеткие множества приводят также к более мягким переходам между управляющими воздействиями и, в частности, позволяют избежать необходимости выполнения резких управляющих воздействий. Тем не менее, при необходимости, резкое управляющее воздействие является возможным, а именно, когда соответствующее правило было установлено и применяется.
Возможна ситуация, когда заключения различных правил относятся к одному и тому же регулируемому параметру, но совместно определяют по меньшей мере два разных управляющих воздействия для этого регулируемого параметра. В таком случае контроллер с обратной связью может вычислять суммарное управляющее воздействие. Это суммарное управляющее воздействие зависит, с одной стороны, от управляющих воздействий, определяемых этими разными правилами, и, с другой стороны, от степеней выполнения исходных условий этих разных правил.
Может быть также, что управляющее воздействие определяется с помощью нечеткого множества. Предпочтительно, в этом случае также вычисляется выполнимое управляющее воздействие, устанавливающее конкретное значение регулируемого параметра. Если заключения разных правил относятся к одному и тому же регулируемому параметру и определяют разные нечеткие множества, суммарное нечеткое множество вычисляется с помощью степеней выполнения, и устанавливаемое значение для управляющего воздействия выводится из этого суммарного нечеткого множества.
В предпочтительной конфигурации контроллер на основе принятых правил включает в себя генератор характеристической карты и блок оценки характеристической карты. Генератор (32) характеристической карты может генерировать оцениваемую с помощью компьютера характеристическую карту, а именно, в зависимости от установленных правил. Эта вычисленная характеристическая карта присваивает каждой возможной комбинации полученных с помощью датчиков значений одно из следующих трех действий, которые контроллер может автоматически выполнять:
- одиночное управляющее воздействие для одиночного регулируемого параметра;
- комбинация управляющих воздействий для разных регулируемых параметров; или
- вывод о том, что этой комбинации значений не присваивается какое-либо управляющее воздействие, и, следовательно, при этой комбинации значений контроллер не выполняет никакого управляющего воздействия.
Блок оценки характеристической карты выполняет фактическое регулирование с обратной связью и обеспечивает отслеживание каждым компонентом сопровождающей системы открытой добычи перемещений ведущей системы открытой добычи. Для этого блок оценки характеристической карты производит оценку расчетной характеристической карты, и контроллер с обратной связью инициирует управляющие воздействия, определяемые, соответственно, характеристической картой.
Характеристическая карта описывает способ работы контроллера с обратной связью в соответствии с установленными правилами. Таким образом, для управления с обратной связью требуются только блок оценки характеристической карты и характеристическая карта. В отличие от этого, при работе контроллера не требуются установленные правила или оцениватель правил. Компьютер, который осуществляет фактическое управление с обратной связью, и для этого содержит блок оценки характеристической карты и память данных с характеристической картой, таким образом, требует меньшей вычислительной мощности или меньшего времени вычисления при одной и той же вычислительной мощности, для вычисления требуемых управляющих воздействий, по сравнению с контроллером с обратной связью, который производит оценку и применение правил во время работы. Контроллеру на основе принятых правил, содержащему блок оценки характеристической карты, не требуется доступ к чтению правил во время работы. Рабочая станция, с помощью которой разработчик устанавливает правила, и которая содержит генератор характеристической карты, может, по меньшей мере, в течение некоторого времени располагаться на удалении от установки открытой добычи и не требуется во время работы, но может использоваться, например, в установке открытой добычи во время тестирования.
Вычисленная характеристическая карта остается действительной до тех пор, пока установленное правило не будет изменено или удалено, или пока не будет введено дополнительное правило. Предпочтительно, генератор характеристической карты, таким образом, повторно вычисляет характеристическую карту, если правило было изменено, удалено или дополнено. Предпочтительно, изменение, удаление или дополнение правила приводит к автоматической активации генератора характеристической карты.
В одной возможной конфигурации контроллер с обратной связью осуществляет регулирование верхнего уровня и подчиненное регулирование, и, таким образом, представляет собой каскадный контроллер. Для регулирования верхнего уровня используются контроллеры с обратной связью или характеристическая карта, сгенерированная вышеописанным способом. При регулировании верхнего уровня регулирование регулируемых параметров производится таким образом, чтобы подвижные компоненты сопровождающей системы открытой добычи отслеживали перемещения ведущей системы открытой добычи в пределах заданного первого допуска. Таким образом, может иметь место отклонение между идеальным положением и/или перемещением и фактическим положением и/или перемещением, которое было получено с помощью регулирования верхнего уровня на основе системы правил, но все-таки находится в пределах первого допуска. Подчиненное регулирование уменьшает это отклонение, т.е. более точно регулирует перемещение подвижного компонента или каждого подвижного компонента сопровождающей системы открытой добычи. Для подчиненного регулирования, предпочтительно, применяется заданная модель процесса или какой-либо другой известный способ регулирования с обратной связью, например, с помощью ПИД-регулятора. Подчиненное регулирование производится для того, чтобы подвижные компоненты, удерживаемые в пределах заданного допуска регулированием верхнего уровня, отслеживали перемещения ведущей системы открытой добычи с заданной точностью, например, в пределах второго допуска, который меньше первого допуска.
При таком каскадном регулировании, как правило, требуется меньше установленных правил, чем при регулировании только посредством оценки установленных правил. Таким образом, правила могут устанавливаться быстрее и лучше контролироваться разработчиком, чем при использовании только набора правил, предназначенного для управления с обратной связью сопровождающей системой открытой добычи. Модель процесса, которая, предпочтительно, используется для подчиненного регулирования, должна быть действительной только в пределах заданного первого допуска, и, следовательно, во многих случаях может быть линейной моделью процесса. В пределах заданного допуска эта линейная модель процесса описывает реальный процесс достаточно точно.
Краткое описание чертежей
Комплекс для открытой добычи согласно настоящему изобретению более подробно описывается ниже на примере возможного варианта реализации, представленного на прилагаемых чертежах, на которых:
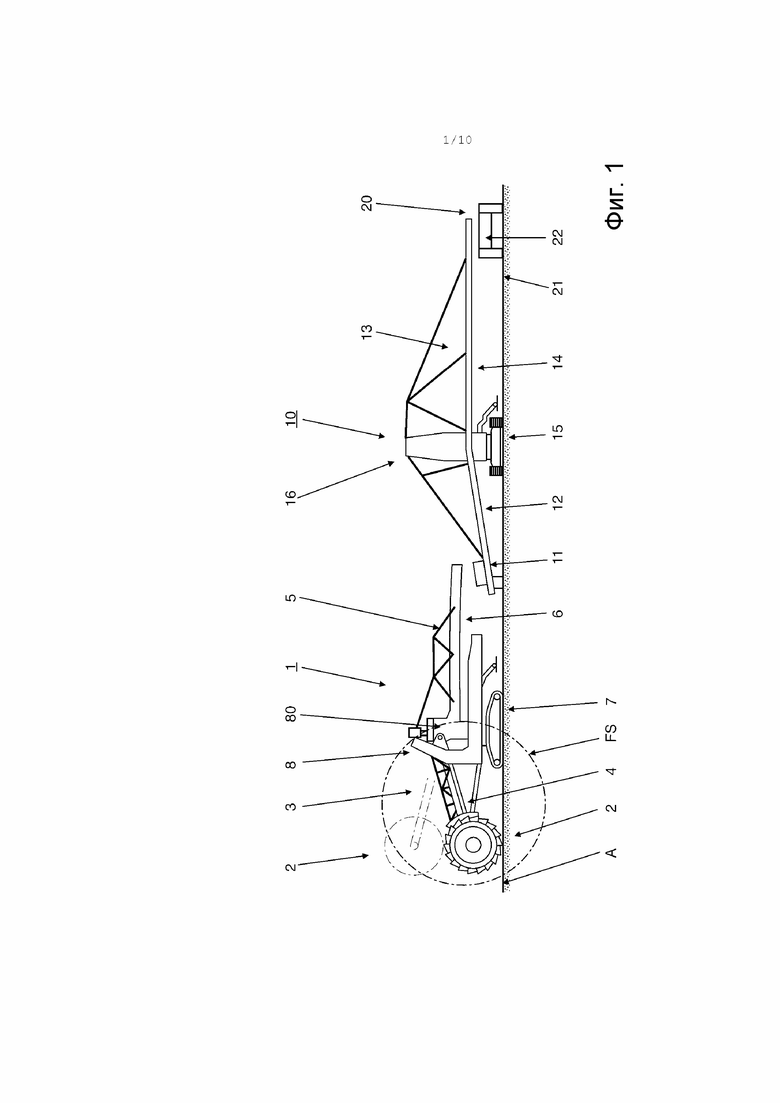
фиг. 1 – вид сбоку комплекса для открытой добычи согласно первому варианту реализации с роторным многоковшовым экскаватором, самоходным перегружателем и саморазгружающейся вагонеткой;
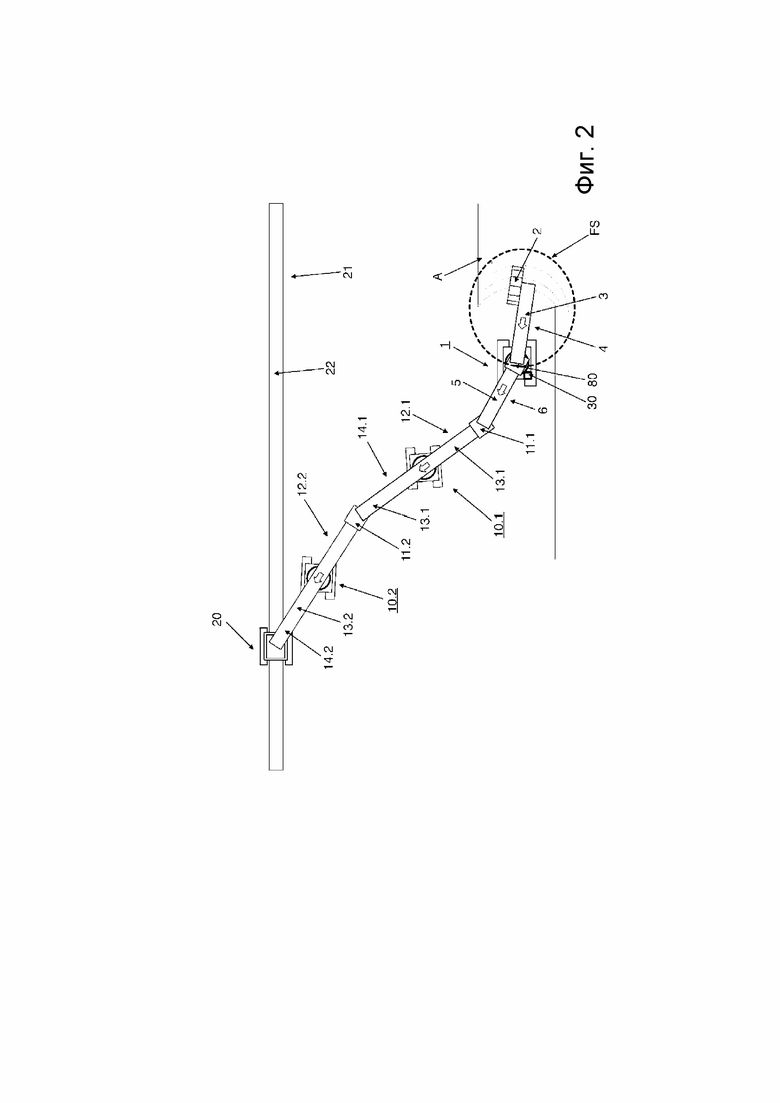
фиг. 2 – вид в плане модифицированного первого варианта реализации с роторным многоковшовым экскаватором, двумя самоходными перегружателями, следующими один за другим, и саморазгружающейся вагонеткой;
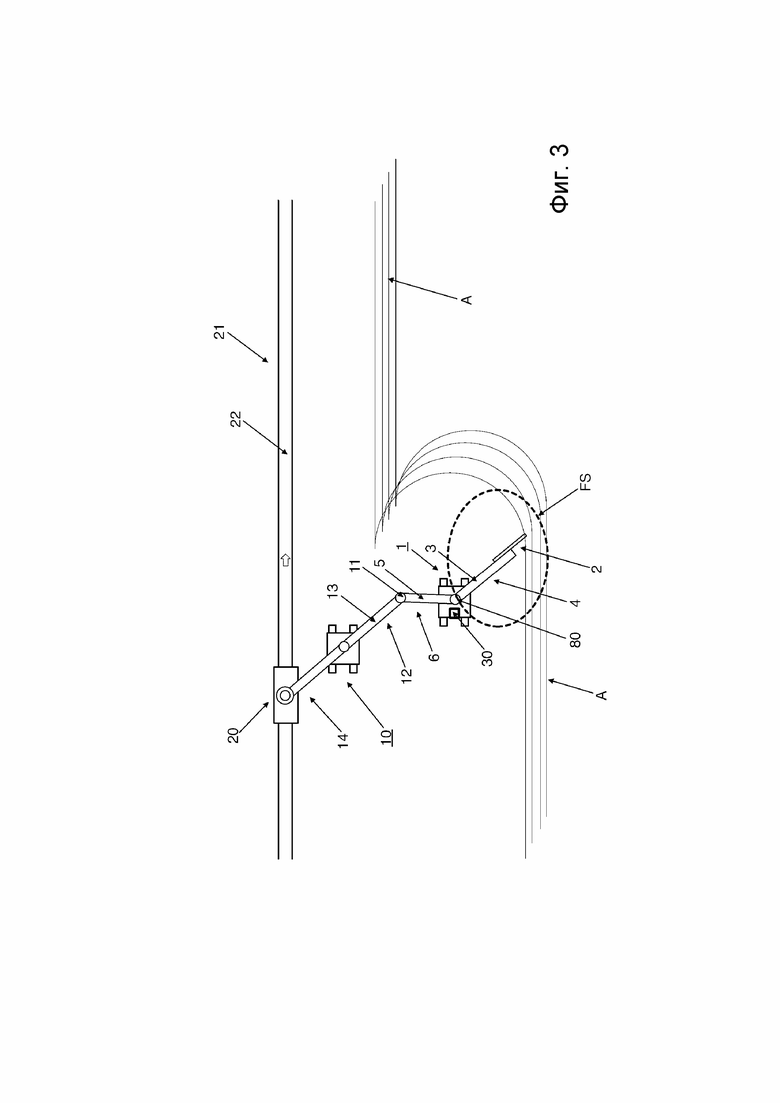
фиг. 3 – вид в плане комплекса для открытой добычи с роторным многоковшовым экскаватором, самоходным перегружателем и саморазгружающейся вагонеткой;
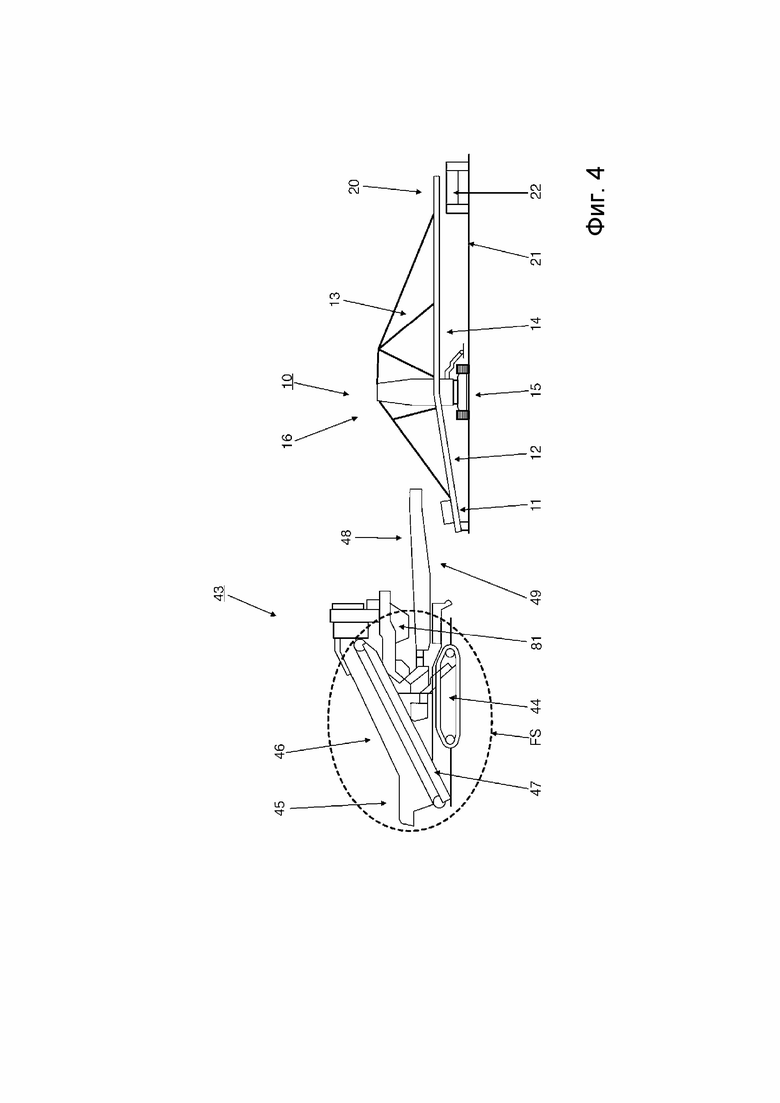
фиг. 4 – вид сбоку передвижной дробилки и комплекса для открытой добычи согласно второму варианту реализации с самоходным перегружателем и саморазгружающейся вагонеткой;
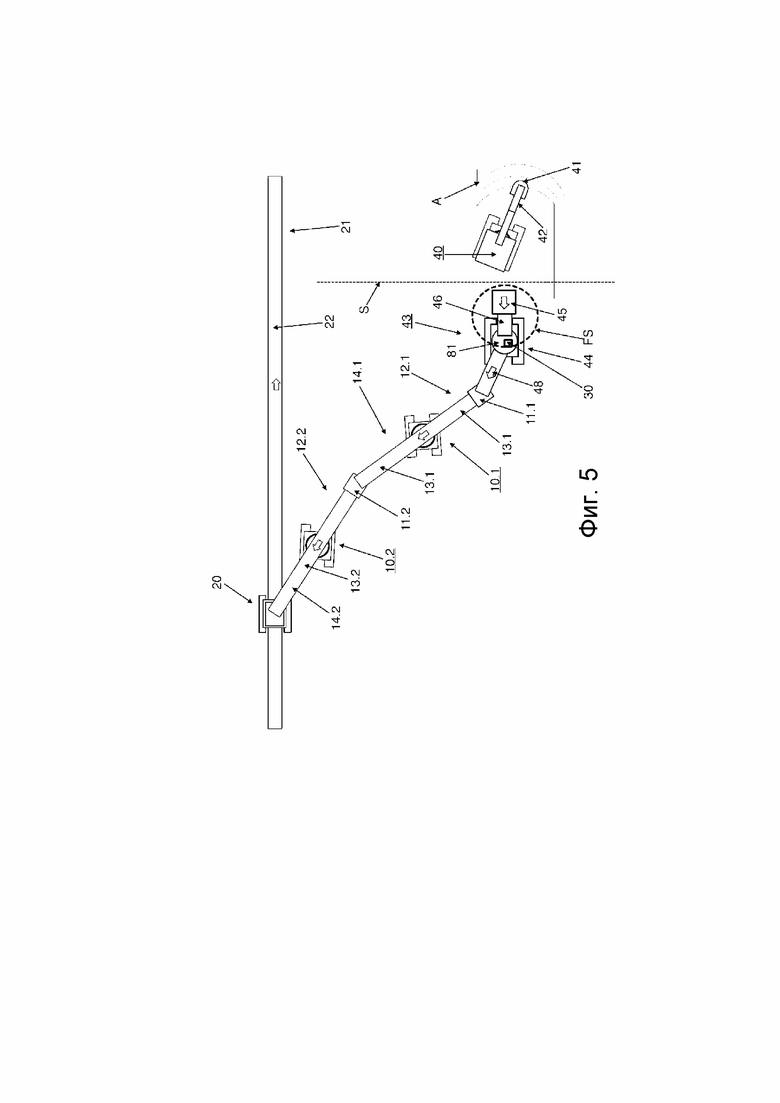
фиг. 5 – вид в плане модифицированного второго варианта реализации с передвижной дробилкой, двумя самоходными перегружателями, следующими один за другим, и саморазгружающейся вагонеткой;
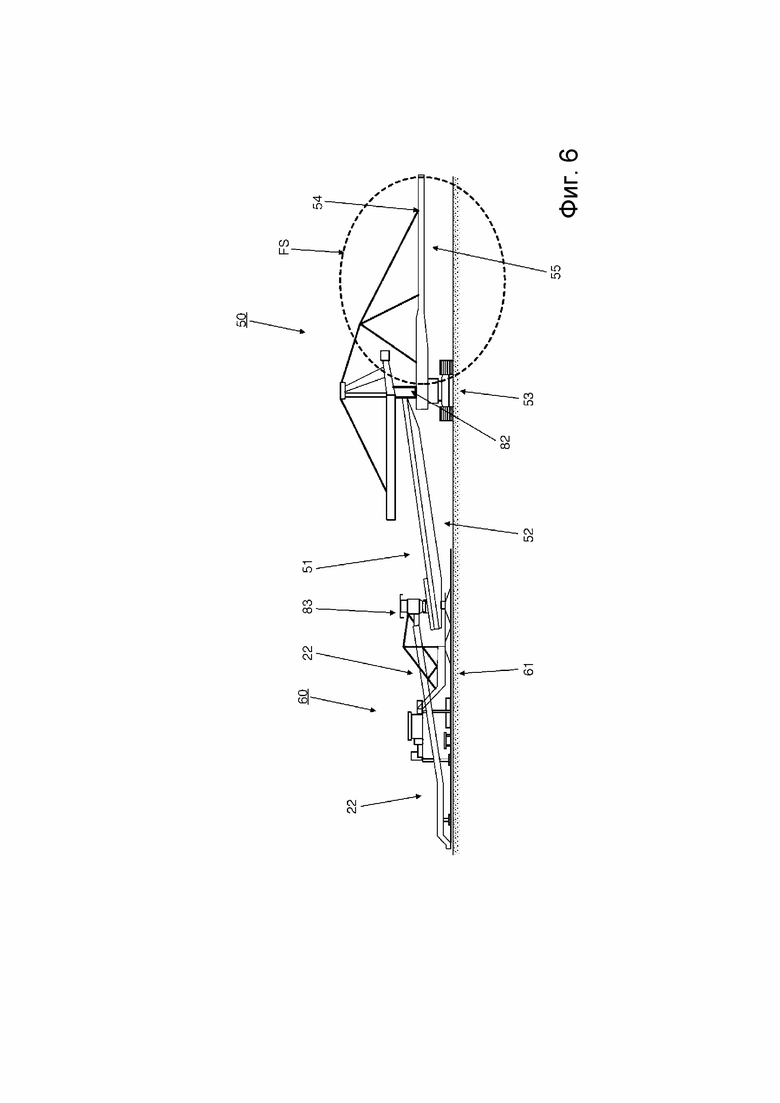
фиг. 6 – вид сбоку комплекса для открытой добычи согласно третьему варианту реализации, содержащего отвалообразователь и ленточный перегружатель;
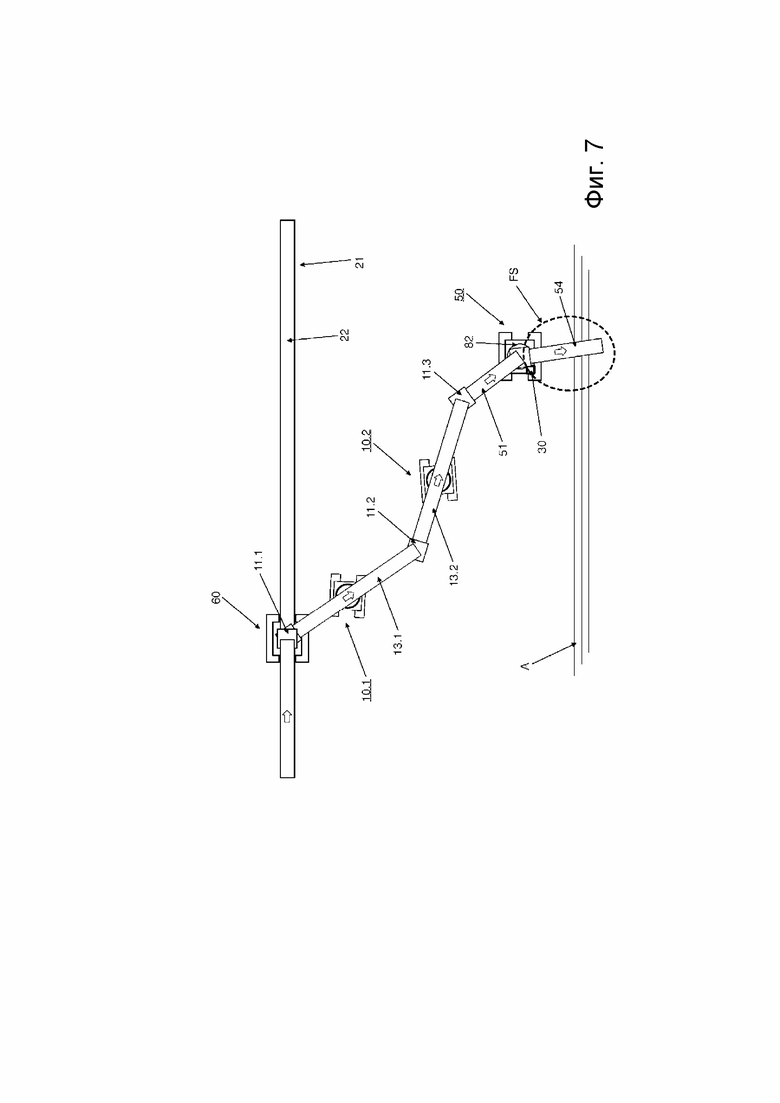
фиг. 7 – вид в плане модифицированного второго варианта реализации с отвалообразователем, двумя самоходными перегружателями, следующими один за другим, и ленточным перегружателем;
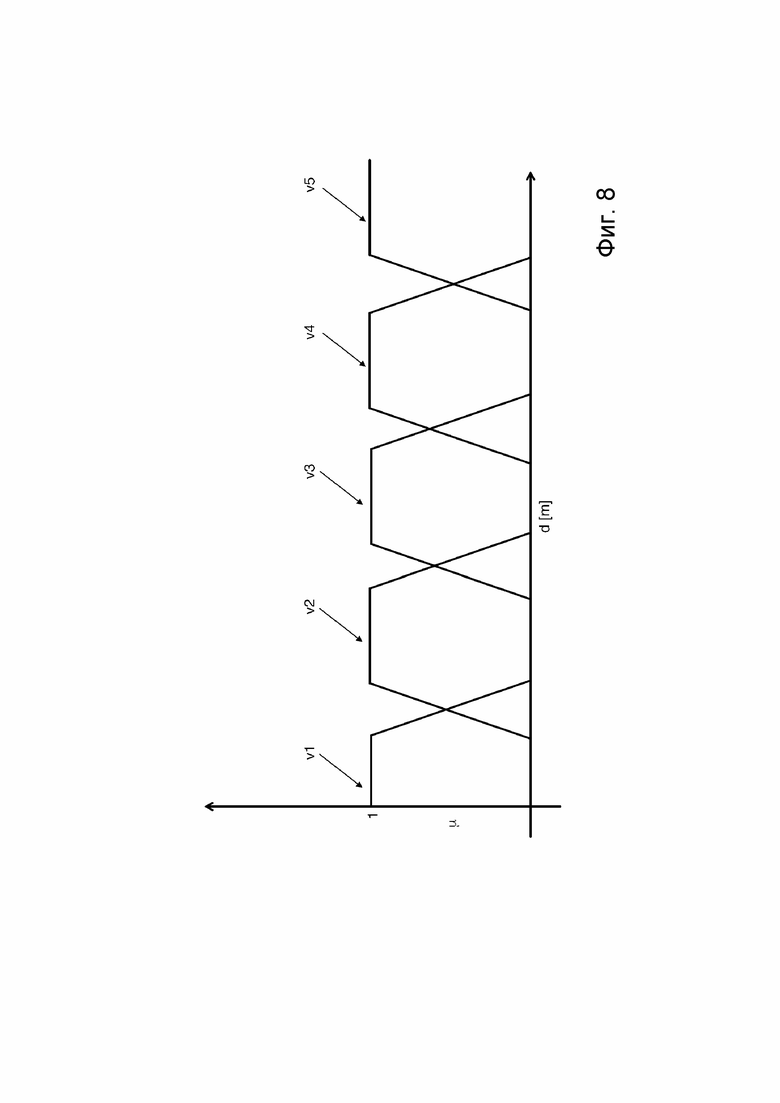
фиг. 8 – пример, демонстрирующий пять нечетких множеств для пяти лингвистических переменных изменяемой величины комплекса для открытой добычи;
фиг. 9 – демонстрация, в качестве примера, оценки двух нечетких правил;
фиг. 10 – генерирование характеристической карты, которой контроллер следует во время работы.
Подробное описание изобретения
Комплекс для открытой добычи согласно первому варианту реализации содержит:
- роторный многоковшовый экскаватор 1;
- бесконечный приводной уступный конвейер, проходящий вдоль уступа 21 карьера;
- саморазгружающуюся вагонетку 20 над уступным конвейером 22; и
- при необходимости, по меньшей мере одно соединительное устройство в виде одного или нескольких самоходных перегружателей 10, 10.1, 10.2, расположенных между роторным экскаватором 1 и саморазгружающейся вагонеткой 20.
Две возможные конфигурации комплекса для открытой добычи показаны на фиг. 1 (вид сбоку), а также на фиг. 2 и фиг. 3 (вид в плане). В конфигурации, показанной на фиг. 2, имеются два самоходных перегружателя 10.1 и 10.2, следующие один за другим; конфигурация, показанная на фиг. 3. содержит один самоходный перегружатель 10. Если расстояние между роторным многоковшовым экскаватором 1 и саморазгружающейся вагонеткой 20 всегда является достаточно малым, возможна также конфигурация без самоходного перегружателя.
Роторный многоковшовый экскаватор 1 содержит:
- ковшовое колесо 2, которое вращается и уносит добываемую породу из забоя A;
- ходовую часть 7 по меньшей мере с двумя параллельными гусеницами;
- верхнюю часть 8 с возможной кабиной оператора, причем верхняя часть 8 может поворачиваться относительно ходовой части 7 вокруг вертикальной оси;
- лоток 80, прикрепленный к верхней части 8;
- приводной приемный ленточный конвейер 3;
- кронштейн 4 ковшового колеса, на котором закреплены ковшовое колесо 2 и приемный ленточный конвейер 3, прикрепленный к верхней части 8;
- приводной разгрузочный ленточный конвейер 5; и
- стрелу 6, несущую разгрузочный ленточный конвейер 5, которая, аналогичным образом, прикреплена к верхней части 8.
Самоходный перегружатель или каждый самоходный перегружатель 10, 10.1, 10.2, соответственно, содержит:
- ходовую часть 15 с двумя параллельными гусеницами;
- верхнюю часть 16, которая может поворачиваться относительно ходовой части 15 самоходного перегружателя вокруг вертикальной оси;
- приемный лоток 11, 11.1, 11.2;
- приемную стрелу 12, 12.1, 12.2 с приемным лотком 11, 11.1, 11.2, закрепленную на верхней части 16;
- разгрузочную стрелу 14, 14.1, 14.2, закрепленную на верхней части 16; и
- непрерывную конвейерную ленту 13, 13.1, 13.2, установленную на обеих стрелах 12, 12.1, 12.2 и 14, 14.1, 14.2.
Вместо одной непрерывной конвейерной ленты 13, 13.1, 13.2 в конструкции также могут быть предусмотрены две отдельные конвейерные ленты, расположенные одна за другой, установленные, соответственно, на стреле 12, 12.1, 12.2 и 14, 14.1, 14.2. Предпочтительно, в таком случае одна стрела 14, 14.1, 14.2 может поворачиваться относительно другой стрелы 12, 12.1, 12.2. Добываемая порода падает с ленты приемного конвейера и по лотку поступает на конвейерную ленту разгрузочной стрелы самоходного перегружателя 10, 10.1, 10.2.
Саморазгружающаяся вагонетка 20 содержит приемную воронку, расположенную над уступным конвейером 22, и может линейно перемещаться в обоих направлениях вдоль уступного конвейера 22, приводимая собственным приводом.
В первом варианте реализации роторный многоковшовый экскаватор 1 является приемной системой. Если расстояние между роторным многоковшовым экскаватором 1 и саморазгружающейся вагонеткой 20 всегда является достаточно малым, возможна также конфигурация без самоходного перегружателя. Разгрузочный ленточный конвейер 5 и стрела 6 относятся к отводящему конвейерному устройству приемной системы.
Комплекс в первом варианте реализации работает следующим образом, и во время работы должны соблюдаться следующие ограничивающие условия:
- Приводимое ковшовое колесо 2 уносит добываемую породу с террасовидного забоя A.
- Когда ковшовое колесо 2 удаляет добываемую породу, кронштейн 4 с ковшовым колесом 2 и приемный ленточный конвейер 3 непрерывно перемещаются туда и обратно.
- По достижении конца диапазона поворота роторный многоковшовый экскаватор 1 перемещается вперед с помощью ходовой части 7. По достижении максимальной глубины удаления в забое A роторный многоковшовый экскаватор 1 отходит назад, опускает вниз кронштейн 4 ковшового колеса и начинает удаление следующего слоя в передней части забоя A. Разумеется, возможна также ситуация, когда роторный многоковшовый экскаватор 1 производит удаление только одного слоя.
- Добываемая порода, удаленная с помощью ковшового колеса 2, падает на приемный ленточный конвейер 3.
- Приемный ленточный конвейер 3 осуществляет отвод добываемой породы.
- Отведенная добываемая порода падает с приемного ленточного конвейера 3, попадает на лоток 20, и затем на разгрузочный ленточный конвейер 5.
- Разгрузочный ленточный конвейер 5 осуществляет отвод добываемой породы.
- Отведенная добываемая порода падает с разгрузочного ленточного конвейера 5 на приемный лоток 11 или на первый приемный лоток 11.1, и затем на конвейерную ленту 13 или на первую конвейерную ленту 13.1.
- В конфигурации с двумя самоходными перегружателями 10.1, 10.2 первая конвейерная лента 13.1 транспортирует добываемую породу на второй приемный лоток 11.2, и затем добываемая порода падает на вторую конвейерную ленту 13.2.
- Конвейерная лента 13 или вторая конвейерная лента 13.2 производит отвод добываемой породы.
- Отведенная добываемая порода падает с конвейерной ленты 13 или со второй конвейерной ленты 13.2 сверху в саморазгружающуюся вагонетку 20.
- Саморазгружающаяся вагонетка 20 действует как загрузочная воронка и направляет добываемую породу на уступный конвейер 22.
- Уступный конвейер 22 производит отвод добываемой породы.
В первом варианте реализации, компоненты установки могут перемещаться следующим образом:
- Роторный многоковшовый экскаватор 1, самоходный перегружатель или каждый самоходный перегружатель 10, 10.1, 10.2 и саморазгружающаяся вагонетка 20 могут перемещаться независимо друг от друга. Механически эти компоненты не соединены друг с другом.
- Роторный многоковшовый экскаватор 1 может перемещаться вперед и назад. Роторный многоковшовый экскаватор 1 может также перемещаться по кривой, например, с помощью двух параллельных гусениц ходовой части 7, которые поворачиваются в противоположных направлениях и/или с разной скоростью, или если роторный многоковшовый экскаватор 1 имеет трехточечную ходовую часть или несколько гусеничных ходовых частей, расположенных друг за другом. В случае трехточечной ходовой части две гусеницы расположены друг за другом, а третья гусеница смещена вбок относительно этих двух гусениц.
- Основной поворотный механизм может поворачивать верхнюю часть 8, и, следовательно, кронштейн 4 ковшового колеса с ковшовым колесом 2 и приемный ленточный конвейер 3 относительно ходовой части 7 вокруг вертикальной оси.
- Подъемный механизм может перемещать кронштейн 4 ковшового колеса с ковшовым колесом 2 и приемный ленточный конвейер 3 вверх и вниз.
- Аналогично, дополнительный поворотный механизм может поворачивать стрелу 6 с разгрузочным ленточным конвейером 5 относительно ходовой части 7 вокруг вертикальной оси.
- Дополнительный подъемный механизм может перемещать стрелу 6 вверх и вниз.
- Стрела 6 может перемещаться независимо от кронштейна 4 ковшового колеса. Таким образом, при виде в плане между приемным ленточным конвейером 3 и разгрузочным ленточным конвейером 5 может возникать угол (см. фиг. 2 и фиг. 3).
- Верхняя часть 16 самоходного перегружателя 10, 10.1, 10.2 может быть выполнена с возможностью поворачивания относительно ходовой части 15 самоходного перегружателя вокруг вертикальной оси. При таком поворачивании две стрелы 12, 12.1, 12.2 и 14, 14.1, 14.2 поворачиваются вместе с верхней частью.
- Две стрелы 12, 12.1, 12.2 и 14, 14.1, 14.2 самоходного перегружателя 10, 10.1, 10.2 могут перемещаться вверх-вниз независимо друг от друга, но при этом они должны располагаться на одной прямой, чтобы направлять проходящую по ним конвейерную ленту 13, 13.1, 13.2. И наоборот, если самоходный перегружатель 10, 10.1, 10.2 содержит две отдельные конвейерные ленты, может возникать угол между стрелой 12, 12.1, 12.2 на одной стороне и стрелой 14, 14.1, 14.2 на другой стороне при виде в плане.
- В одной возможной конфигурации по меньшей мере одна стрела 6, 12, 12.1, 12.2, 14, 14.1, 14.2 имеет телескопическую конструкцию, и исполнительный механизм может ограничивать её длину.
- Собственный привод может перемещать саморазгружающуюся вагонетку 20 линейно в обоих направлениях вдоль уступного конвейера 22.
Регулируемым параметром считается параметр комплекса для открытой добычи, значение которого может быть специально изменено с помощью исполнительного элемента, в частности, двигателя, блока цилиндра с поршнем или иного привода, что может приводить к перемещению какого-либо компонента комплекса для открытой добычи.
Несмотря на эти степени свободы, всегда должны соблюдаться следующие ограничивающие условия:
- В рассматриваемом варианте реализации длины кронштейнов 4, 6, 12, 14 являются постоянными. В возможной модификации по меньшей мере один кронштейн имеет телескопическую конструкцию, так что его длина может изменяться.
- Каждый самоходный перегружатель 10, 10.1, 10.2 и саморазгружающаяся вагонетка 20 должны следовать за перемещениями роторного экскаватора 1 и его компонентов. В рассматриваемом варианте реализации, вышеупомянутое отслеживание должно происходить автоматически, поскольку при нормальной работе оператор управляет роторным экскаватором 1, но ни самоходный перегружатель 10, 10.1, 10.2, ни саморазгружающаяся вагонетка 20 не управляются оператором. Этот оператор может находиться в возможной кабине оператора в верхней части 8 роторного экскаватора 1 или осуществлять управление роторным экскаватором 1 на расстоянии с помощью пульта дистанционного управления.
- Разгрузочный край приемного ленточного конвейера 3 должен находиться над приемным краем разгрузочного ленточного конвейера 5, что обеспечивается конструкцией роторного экскаватора 1.
- Угол между разгрузочным ленточным конвейером 5 и приемным ленточным конвейером 3 при виде в плане должен находиться в заданном диапазоне. Аналогичным образом, угол между разгрузочным ленточным конвейером 5 и одиночной конвейерной лентой 13 или первой конвейерной лентой 13.1, как и угол между двумя конвейерными лентами самоходного перегружателя 10, 10.1, 10.2, также должны находиться в заданном диапазоне.
- Разгрузочный край разгрузочного ленточного конвейера должен находиться над одиночным приемным лотком 11 или первым приемным лотком 11.1.
- При наличии двух самоходных перегружателей 10.1, 10.2 разгрузочный край первой конвейерной ленты 13.1 должен быть расположен над вторым приемным лотком 11.2.
- Разгрузочный край одиночной конвейерной ленты 13 или последней конвейерной ленты 13.2 должен находиться над саморазгружающейся вагонеткой 20.
В первом варианте реализации ковшовое колесо 2, приемный ленточный конвейер 3 и кронштейн 4 ковшового колеса образуют ведущую систему открытой добычи, а компоненты 5 - 20 образуют сопровождающую систему открытой добычи. На фиг. 1 - 7 соответствующая ведущая система открытой добычи показана пунктирным кругом с обозначением FS. Описанная ниже система управления с обратной связью обеспечивает отслеживание сопровождающей системой открытой добычи с компонентами 5 -20 перемещений ведущей системы открытой добычи 2, 3, 4. Уступный конвейер 22 приводится в действие независимо от этой системы управления с постоянной скоростью или со скоростью, которая зависит от количества добываемой породы в единицу времени.
Текущее положение и/или перемещение и/или направление движения роторного экскаватора 1A фиксируется рядом датчиков. Дополнительные датчики служат для определения текущего положения и/или перемещения и/или направления движения самоходного перегружателя или каждого самоходного перегружателя 10, 10.1, 10.2 и саморазгружающейся вагонетки 20. Дополнительные датчики используются для измерения соответствующего выравнивания каждой конвейерной ленты 3, 5, 13, 13.1, 13.2.
Вычислительный блок производит обработку измеренных значений, полученных от соответствующих датчиков на стреле 6 экскаватора, разгрузочной стреле 14, 14.1 и/или приемном лотке 11, 11.1, 11.2. Вычислительный блок определяет расстояние по вертикали от стрелы 6 до приемного лотка 11, 11.1 и положение приемного лотка 11, 11.1 относительно стрелы 6. При конфигурации с двумя самоходными перегружателями 10.1, 10.2 вычислительный блок определяет расстояние по вертикали между разгрузочной стрелой 14.1 и приемной стрелой 12.1. С помощью дополнительных датчиков вычислительный блок определяет поворот стрелы 6 экскаватора относительно приемного лотка 11, 11.1. С помощью дополнительных датчиков на разгрузочной стреле 14.1 вычислительный блок определяет расстояние по вертикали от неё до приемного лотка 11.2. Кроме того, вычислительный блок с помощью этих датчиков определяет угол отклонения продольной оси стрелы 6 от продольной оси приемной стрелы 12, 12.1. Датчик угла поворота измеряет угол поворота верхней части 8 относительно ходовой части 7 роторного экскаватора 1 вокруг вертикальной оси. Еще один соответствующий датчик измеряет углы стрелы 4 и стрелы 6 относительно ходовой части 8. Датчик угла наклона измеряет угол наклона ходовой части 8 относительно горизонтали. Еще один датчик измеряет угол поворота конвейерной ленты 13, 13.1, 13.2 вокруг вертикальной оси относительно ходовой части 15 самоходного перегружателя 10, 10.1, 10.2. Еще один датчик служит для определения соответствующего угла приемной стрелы 12, 12.1, 12.2 и угла разгрузочной стрелы 14, 14.1, 14.2 относительно ходовой части самоходного перегружателя 10, 10.1, 10.2. Датчик угла наклона измеряет угол наклона ходовой части самоходного перегружателя относительно горизонтали. Соответствующие датчики измеряют скорость перемещения и направление движения ходовой части 7 экскаватора и ходовой части или каждой ходовой части 15 самоходного перегружателя.
В первом варианте реализации оператор, находящийся в кабине оператора роторного экскаватора 1 или управляющий им на расстоянии с помощью пульта дистанционного управления, управляет исполнительным элементом роторного экскаватора 1 посредством соответствующего вмешательства пользователя, и, таким образом, заставляет ведущую систему открытой добычи 2, 3, 4 поворачиваться и/или перемещаться каким-либо другим образом, и, соответственно, следовать за забоем A, сформированным в процессе добычи. Сопровождающая система открытой добычи 5 -20 всегда следует за перемещениями ведущей системы открытой добычи 2, 3, 4.
На фиг. 4 и 5 представлен второй вариант реализации настоящего изобретения на виде сбоку (фиг. 4) и на виде в плане (фиг. 5). Одинаковые компоненты обозначены теми же ссылочными позициями, что и в первом варианте реализации. Во втором варианте реализации удаление добываемой породы с забоя A производится одноковшовым экскаватором 40. Одноковшовый экскаватор 40 содержит ковш 41, установленный на ковшовом кронштейне 42. Управление этим одноковшовым экскаватором 40 осуществляется оператором. Аналогично роторному экскаватору 1 в первом варианте реализации, одноковшовый экскаватор 40 также может перемещаться линейно и вращательно в одном направлении по земле.
Одноковшовый экскаватор 40 передает добываемую породу в передвижную дробилку 43, которая измельчает добываемую породу, и управление которой также осуществляется оператором. Этот оператор может также находиться в кабине оператора передвижной дробилки 43 или осуществлять управление дробилкой 43 на расстоянии. Благодаря ходовой части 44, содержащей по меньшей мере две гусеницы, передвижная дробилка 43 может перемещаться линейно и вращательно в любом направлении по земле. Передаваемая добываемая порода из бункера 45 дробилки 43 падает на приемный ленточный конвейер 46. Бункер 45 и приемный ленточный конвейер 46 установлены на приемной стреле 47.
В одной из возможных конфигураций подъемный механизм может перемещать приемную стрелу 47 вверх и вниз, а поворотный механизм может поворачивать приемную стрелу 47 относительно вертикальной оси. В другой конфигурации приемный ленточный конвейер 46 выполнен в виде фартучного питателя 47, и бункер 45 может линейно и/или вращательно перемещаться по земле только всей дробилкой 43 вместе с приемной стрелой 47.
Добываемая порода с приемного ленточного конвейера 46 попадает на лоток 81, и оттуда – на разгрузочный ленточный конвейер 48, установленный на разгрузочной стреле 49. Во втором варианте реализации бункер 45, приемный ленточный конвейер 46 и приемная стрела 47 передвижной дробилки 43 входят в состав ведущей системы открытой добычи, а разгрузочный ленточный конвейер 48 и стрела 49 относятся к сопровождающей системе открытой добычи. Одноковшовый экскаватор 40 перемещается независимо от ведущей системы открытой добычи и, как указано в формуле изобретения, не входит в состав установки открытой добычи. На фиг. 5 показана граница S системы.
На фиг. 6 и 7 приведены вид сбоку и вид в плане третьего варианта реализации, в котором отвалообразователь 50 передает добываемую породу, в частности, избыточную, получаемую в забое A. Отвалообразователь 50 содержит приемный ленточный конвейер 51, установленный на приемной стреле 52 и направляемый ей, разгрузочный ленточный конвейер 54, установленный на разгрузочной стреле 55 и направляемый ей, лоток 82, а также ходовую часть 53. Благодаря ходовой части 53, отвалообразователь 50 может перемещаться линейно и вращательно в любом направлении по земле, а управление им производится оператором. Этот оператор может также находиться в кабине оператора отвалообразователя 50 или осуществлять управление отвалообразователем 50 на расстоянии.
В третьем варианте реализации уступный конвейер 22 передает добываемую породу на ленточный перегружатель 60 с лотком 83 и ходовой частью 61. Ленточный перегружатель 60 может линейно перемещаться по земле с помощью своего собственного привода. Один сегмент уступного конвейера 22 ведет на ленточный перегружатель 60, а другой – отходит от ленточного перегружателя 60. Ленточный перегружатель 60 поднимает уступный конвейер 22 и направляет его на лоток 83, а затем обратно. Добываемая порода поднимающимся уступным конвейером 22 передается на лоток 83, и с лотка 83 падает на приемный ленточный конвейер 51. Приемный ленточный конвейер 51 передает добываемую породу на лоток 82. С лотка 82 добываемая порода попадает на разгрузочный ленточный конвейер 54. Оператор на отвалообразователе 60 управляет разгрузочной стрелой 55 и, следовательно, разгрузочным ленточным конвейером 54, и обеспечивает попадание добываемой породы в нужное место. В третьем варианте реализации разгрузочный ленточный конвейер 54 и стрела 55 входят в состав ведущей системы открытой добычи, а приемный ленточный конвейер 51 и стрела 52 относятся к сопровождающей системе открытой добычи.
Контроллер обработки данных (контроллер с обратной связью) 30, например, установленный в качестве программного обеспечения на управляющем устройстве роторного экскаватора 1 или передвижной дробилки 40 или отвалообразователя 50, получает сигналы от различных датчиков, оценивает эти сигналы и, в зависимости от результатов оценки, производит регулирование ряда регулируемых параметров для стрелы 6, 49, 55, а также на самоходном перегружателе или каждом самоходном перегружателе 10, 10.1, 10.2, на саморазгружающейся вагонетке 20 и на ленточном перегружателе 60. Контроллер 30 с обратной связью автоматически регулирует регулируемые параметры таким образом, чтобы все подвижные компоненты сопровождающей системы открытой добычи 5 - 16, 20, 48, 49, 51, 52, 60 автоматически отслеживали перемещения прямо или косвенно, и чтобы благодаря этому выполнялись вышеупомянутые ограничивающие условия. В рассматриваемом варианте реализации в контроллер 30 с обратной связью не требуется закладывать аналитическую модель, описывающую кинетику и возможные перемещения компонентов установки открытой добычи.
Наоборот, в рассматриваемом варианте реализации контроллер 30 с обратной связью сформирован как контроллер на основе системы правил или содержит контроллер на основе системы правил. Этот контроллер 30 с обратной связью производит оценку множества установленных компьютерно-оцениваемых правил. Каждое правило варианта реализации включает в себя исходное условие и по меньшей мере одно заключение. Каждое исходное условие правила может быть одиночным исходным условием или логической комбинацией нескольких одиночных исходных условий. Логическая комбинация связывает несколько одиночных исходных условий с помощью логических операторов, а именно, операторов "и", "или", "нет". Каждое одиночное исходное условие относится к датчику и определяет диапазон возможных значений параметра, измеряемого этим датчиком.
Каждое заключение относится конкретно к одному регулируемому параметру сопровождающей системы открытой добычи 5 до 16, 20, 48, 49, 51, 52, 60 и определяет возможное управляющее воздействие для этого регулируемого параметра. Заключение может определять конкретные параметры управляющего воздействия для регулируемого параметра, например, величину перемещения, ускорение и/или период времени, в течение которого будет работать данное управляющее воздействие. Если заключение включает в себя ряд возможных заключений, это определяет ряд управляющих воздействий, которые должны выполняться одновременно или, по меньшей мере, с перекрытием по времени. Таким образом, правило с несколькими заключениями представляет собой сокращенный способ определения ряда правил с одним и тем же исходным условием и с одним заключением в каждом случае.
Как уже было указано выше, каждое одиночное исходное условие правила определяет диапазон возможных значений параметра, измеряемого датчиком. Одиночное исходное условие может определять также подмножество возможных значений, и измеряемое датчиком значение может либо попадать в данное подмножество, либо находиться за его границами. Возможно также, что одиночное исходное условие определяет диапазон так называемого нечеткого множества. A измеряемое датчиком значение имеет степень принадлежности к этому диапазону, которая либо равна единице (измеряемое датчиком значение полностью лежит в данном диапазоне), либо равна нулю (измеряемое датчиком значение лежит за пределами диапазона), либо находится между нулем и единицей (измеряемое датчиком значение частично относится к данному диапазону со степенью принадлежности, определяемой данным числом).
Для каждого датчика, соответственно, устанавливается ряд так называемых лингвистических переменных. Каждой лингвистической переменной, соответственно, присваивается подмножество (четкое множество) или нечеткое множество. Подмножество может считаться частным случаем нечеткого множества, и в случае подмножества каждая степень принадлежности равна либо нулю, либо единице, но не может быть значением между нулем и единицей.
Заключение может определять конкретное значение для управляющего воздействия или же определять управляющее воздействие с помощью нечеткого множества. В случае системы управления с обратной связью само собой разумеется, что для управляющего воздействия используется значение.
В тексте ниже приведены первые несколько примеров лингвистических переменных. Приведенные примеры относятся к первому варианту реализации. Множество лингвистических переменных, соответственно, устанавливается для различных изменяемых величин комплекса открытой добычи.
Изменяемая величина 1: направление движения роторного экскаватора 1 относительно уступного конвейера 22.
Лингвистические переменные: резко вправо, вправо, немного вправо, параллельно, немного влево, влево, резко влево.
Изменяемая величина 2: расстояние между роторным многоковшовым экскаватором 1 и уступным конвейером 22.
Лингвистические переменные: очень маленькое, маленькое, умеренное, большое, очень большое.
Изменяемая величина 3: угол между продольной осью разгрузочного ленточного конвейера 5 и продольной осью конвейерной ленты 13.
Лингвистические переменные: резко вправо, вправо, немного вправо, параллельно, немного влево, влево, резко влево.
Изменяемая величина 4: направление движения самоходного перегружателя 10, 10.1, 10.2 относительно уступного конвейера 22.
Лингвистические переменные: резко вправо, вправо, немного вправо, параллельно, немного влево, влево, резко влево.
Изменяемая величина 5: расстояние между самоходным перегружателем 10, 10.1, 10.2 и уступным конвейером 22.
Лингвистические переменные: очень маленькое, маленькое, умеренное, большое, очень большое.
Изменяемая величина 6: угол между продольной осью конвейерной ленты 13, 13.1, 13.2 и продольной осью уступного конвейера 22
Устанавливаемая величина 1: поворот конвейерной ленты 13, 13.1, 13.2
Лингвистические переменные: резко вправо, вправо, немного вправо, параллельно, немного влево, влево, резко влево.
Устанавливаемая величина 2: курсовое перемещение самоходного перегружателя 10, 10.1, 10.2
Лингвистические переменные: резко вправо, вправо, немного вправо, параллельно, немного влево, влево, резко влево.
В качестве примера ниже приведены несколько правил, в которых используются эти лингвистические переменные.
Нечеткое правило 1:
если
направление движения роторного экскаватора 1 относительно уступного конвейера 22 = немного вправо,
и
угол между продольной осью конвейерной ленты 13.1 и продольной осью уступного конвейера 22 = маленький,
и
угол между продольной осью конвейерной ленты 13.2 и продольной осью уступного конвейера 22 = большой,
то
направление поворота конвейерной ленты 13.2 = вправо (обеспечивается конкретным управляющим воздействием или определяется нечетким множеством).
Нечеткое правило 2:
если
направление движения роторного экскаватора 1 относительно уступного конвейера 22 = резко вправо,
и
угол между продольной осью конвейерной ленты 13.1 и продольной осью уступного конвейера 22 = большой,
и
угол между продольной осью конвейерной ленты 13.2 и продольной осью уступного конвейера 22 = большой,
то
поворот конвейерной ленты 13.1 = немного вправо,
и
поворот конвейерной ленты 13.2 = немного вправо (обеспечивается конкретным управляющим воздействием или определяется нечетким множеством).
Нечеткое правило 3:
направление движения роторного экскаватора 1 относительно уступного конвейера 22 = вправо,
и
угол между продольной осью конвейерной ленты 13.1 и продольной осью уступного конвейера 22 = большой,
и
угол между продольной осью конвейерной ленты 13.2 и продольной осью уступного конвейера 22 = большой,
то
курсовое перемещение конвейерной ленты 13.1= немного вправо,
и
курсовое перемещение конвейерной ленты 13.2 = немного вправо (обеспечивается конкретным управляющим воздействием или определяется нечетким множеством).
На фиг. 8 в качестве примера показаны пять нечетких множеств для пяти лингвистических переменных (от v1 (очень маленькая) до v3 (средняя) и далее до v5 (очень большая)) изменяемой измеряемой величины 2 (расстояние между роторным многоковшовым экскаватором 1 и уступным конвейером 22). Расстояние отложено по оси X, так называемая степень принадлежности µ возможного расстояния из соответствующего нечеткого множества отложена по оси Y (выражена значениями от 0 до 1 включительно). Для каждого возможного значения изменяемой величины 2 сумма степеней принадлежности равна единице.
В приведенных примерах исходные условия и заключения правил, соответственно, относятся исключительно к значениям, полученным в результате измерения в данный момент времени. Возможно также, что одиночное исходное условие относится к изменению по времени измеряемого значения или к значению, измеренному в более ранний момент времени. Например, одиночное исходное условие может относиться к линейной скорости перемещения или угловой скорости поворота, или к ускорению линейного перемещения или углового поворота, или к измеренному значению, которое было получено для конкретного периода времени. Таким образом, контроллер 30 на основе системы правил может создавать "память".
В рассматриваемом варианте реализации контроллер 30 с обратной связью работает с заданной частотой выборки. В каждый момент взятия выборки контроллер 30 обрабатывает измеренные датчиком значения и, при необходимости, значения, измеренные ранее, например, для получения закономерности изменения по времени.
В одной возможной конфигурации контроллер 30 на основе системы правил оценивает заданные правила и применяет их в момент времени, когда он работает. Этот режим целесообразен, в частности, на этапе тестирования, когда производится испытание контроллера 30 с обратной связью, и когда разработчик изменяет отдельные правила или, при необходимости удаляет или добавляет дополнительные правила. Применение правило описано ниже.
В зависимости от измеренных датчиком значений, контроллер 30 с обратной связью, соответственно, вычисляет степень выполнения для каждого исходного условия контроллера. Для этого контроллер 30 с обратной связью сначала, соответственно, вычисляет степень принадлежности для каждого одиночного исходного условия из исходных условий правила. Как было указано выше, каждое одиночное исходное условие относится к датчику. Контроллер 30 с обратной связью вычисляет степень принадлежности значения, измеренного этим датчиком, относительно диапазона, определяемого одиночным исходным условием.
В рассматриваемом варианте реализации эта степень принадлежности и эта степень выполнения выражаются значениями от нуля до единицы (включительно). Если исходное условие правила состоит из одного одиночного исходного условия, степень выполнения равна расчетной степени принадлежности. В противном случае, контроллер 30 с обратной связью вычисляет степень выполнения в зависимости от вычисленных степеней принадлежности соответствующих измеренных датчиком значений относительно одиночных исходных условий, и, таким образом, объединяет эти степени принадлежности с помощью заданного правила суммирования, которое зависит от логической комбинации исходных условий правила. Если, например, исходное условие правила "p1 и p2", и если двумя степенями принадлежности являются µ(p1) и µ(p2), то степень выполнения равна µ = µ(p1)*µ(p2), или же µ = min {µ(p1), µ(p2)}. Если исходное условие правила "p1 или p2", то степень выполнения, например, составляет µ = max {µ(p1), µ(p2)}, или же µ = µ(p1) + µ(p2) - µ(p1)*µ(p2).
Контроллер 30 с обратной связью, соответственно, вычисляет степень выполнения для каждого исходного условия правила. Каждое заключение правила, соответственно, относится к регулируемому параметру и определяет управляющее воздействие для этого регулируемого параметра. Возможна ситуация, когда несколько заключений различных правил относятся к одному и тому же регулируемому параметру и определяют разные управляющие воздействия для этого регулируемого параметра. Контроллер 30 с обратной связью вычисляет суммарное управляющее воздействие для каждого регулируемого параметра, которое должно быть выполнено для данного регулируемого параметра. Для этого контроллер 30 с обратной связью использует заключение, которое относится к данному регулируемому параметру, а также степени выполнения исходных условий соответствующих правил. Контроллер 30 с обратной связью заранее вычислил эти степени выполнения, чтобы быть точным, как описано выше, в зависимости от измеренных датчиком значений и одиночных исходных условий. Суммарное управляющее воздействие может представлять собой, например, взвешенную комбинацию управляющих воздействий, определяемых соответствующими заключениями, которые относятся к данному регулируемому параметру. Степени выполнения при этом используются как коэффициенты взвешивания. Может случиться также, что суммарное управляющее воздействие будет равным управляющему воздействию, определяемому в заключении, которое относится к исходному условию правила с наивысшей степенью выполнения.
Может быть также, что заключение определяется с помощью нечеткого множества, например, если управляющее воздействие для регулируемого параметра U является "большим". Управляющее воздействие, определяющее численное значение, можно интерпретировать как частный случай нечеткого множества. Нечеткие множества заключений, которые относятся к одному и тому же регулируемому параметру, объединяются (суммируются) взвешенным способом в системе управления с обратной связью, причем степени выполнения при этом используются в качестве коэффициентов взвешивания. Из суммированного нечеткого множества выводится одиночное значение, которое используется в качестве управляющего воздействия, например, значение x центроида агрегированного нечеткого множества.
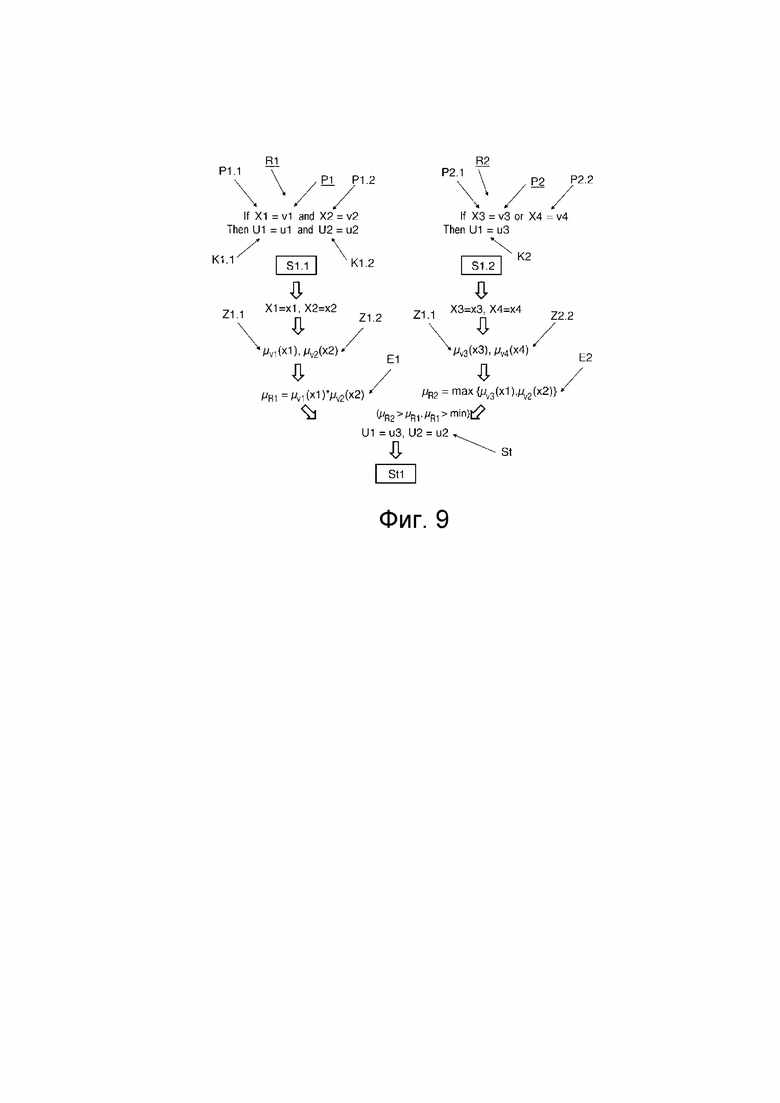
На фиг. 9 в качестве примера поясняется этот способ работы контроллера 30 на основе системы правил. В частности, предписаны два правила:
R1: если X1 = v1 и X2 = v2, то U1 = u1 и U2 = u2;
R2: если X3 = v3 или X4 = v4, то U1 = u3.
Здесь: X1, X2, X3 и X4 – значения, полученные датчиками из комплекта датчиков; U1 и U2 – регулируемые параметры, v1, v2, v3 и v4 – лингвистические переменные для значений X1 - X4; u1 - u3 – два возможных управляющих воздействия для регулируемого параметра U1; и u2 – возможное управляющее воздействие для регулируемого параметра U2. Правило R1 содержит исходное условие P1 с одиночными исходными условиями P1.1 (X1 = v1) и P1.2 (X2 = v2), и два заключения K1.1 (U1 = u1) и K1.2 (U2 = u2). Правило R2 содержит исходное условие P2 с одиночными исходными условиями P2.1 (X3 = v3) и P2.2 (X4 = v4) и заключение K2 (U1 = u3).
Выполняются следующие операции:
- Текущие значения x1 - x4 четырех изменяемых величин X1 - X4 измеряются или получаются непосредственно (операции S1.1 и S1.2).
- Две степени принадлежности µv1(x1) и µv2(x2) двух измеренных значений x1 и x2 вычисляются относительно двух лингвистических переменных v1 и v2 в двух одиночных исходных условиях P1.1 и P1.2 одного правила R1 (с получаемыми результатами Z1.1, Z1.2). Соответственно, вычисляются две степени принадлежности µv3(x3) и µv4(x4), касающиеся правила R2 (получаются результаты Z2.1, Z2.2).
- Вычисляется степень выполнения µR1 = µv1(x1)*µv2(x2) исходного условия правила R1 (результат E1). Вычисляется степень выполнения µR2 = µv3(x1)*µv2(x2) исходного условия правила R2 (результат E2).
- К регулируемому параметру U2 относится только одно заключение, а именно, заключение K1.2 правила R1. Степень выполнения µR1 лежит выше заданного диапазона min. Таким образом, управляющее воздействие, определяемое правилом R1, используется как управляющее воздействие для U2, т.е. U2 = u2.
- Заключение K1.1 правила R1 и заключение K2 правила R2 относятся к регулируемому параметру U1. Степень выполнения µR2 больше, чем степень выполнения µR1. Следовательно, используется управляющее воздействие, определяющее заключение правила R2, т.е. u3. Таким образом, вычисляются два управляющих воздействия U1 = u3, U2 = u2 (операция St). Можно также использовать взвешенную комбинацию u1 = µR1*u1 + µR2*u3 как значение управляющего воздействия для U1.
- В ходе операции St1 контроллер 30 с обратной связью инициирует выполнение обоих управляющих воздействий U1 = u3 (или U1 = µR1*u1 + µR2*u3) и U2 = u2.
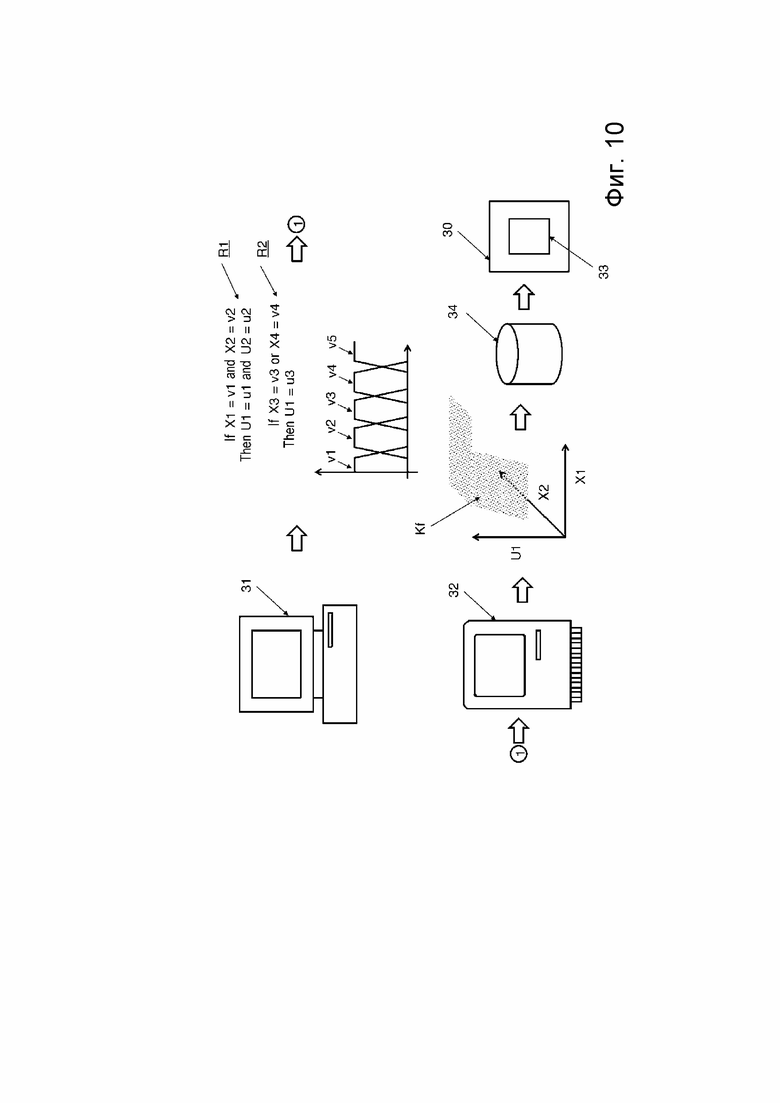
В другой конфигурации контроллер 30 с обратной связью включает в себя генератор характеристической карты и блок оценки характеристической карты. После успешного окончания стадии тестирования генератор характеристической карты производит оценку установленных и протестированных правил и автоматически генерирует характеристическую карту, которая может быть оценена с помощью компьютера. Эта характеристическая карта, соответственно, присваивает каждой возможной комбинации полученных с помощью датчиков значений одиночное управляющее воздействие, ряд управляющих воздействий для различных регулируемых параметров или вывод о том, что для данной комбинации значений не надо выполнять никаких управляющих воздействий. Эта характеристическая карта генерируется, сохраняется и остается действительной до тех пор, пока установленные правила остаются неизменными. Блок оценки характеристической карты выполняет оценку данной характеристической карты, когда контроллер 30 с обратной связью работает с ней, применяя функциональную зависимость, определяемую характеристической картой, к текущей комбинации измеренных датчиками значений. Затем контроллер 30 с обратной связью инициирует заданное управляющее воздействие или каждое заданное управляющее воздействие или же не инициирует никакого управляющего воздействия, если это указано в характеристической карте. Во время работы контроллера требуется только характеристическая карта, но не предписанные правила.
На фиг. 10 проиллюстрирована эта процедура. С помощью рабочей станции 31 разработчик формулирует лингвистические переменные, правила, диапазоны для одиночных исходных условий и функции принадлежности для лингвистических переменных. На основе этих элементов информации генератор 32 характеристической карты генерирует характеристическую карту Kf. Эта характеристическая карта Kf сохраняется в памяти данных 34. Блок 33 оценки характеристической карты является компонентом контроллера 30 с обратной связью, который во время работы имеет доступ на считывание информации из памяти данных 34.
Предпочтительно, чтобы автоматически обнаруживалась операция, во время которой по меньшей мере одно установленное правило было изменено или удалено, или было установлено дополнительное правило. При обнаружении такой операции генератор 32 характеристической карты повторно вычисляет характеристическую карту Kf, которая затем сохраняется в памяти данных 34 с перезаписыванием предыдущей характеристической карты Kf. Блок 33 оценки характеристической карты использует измененную характеристическую карту Kf. Этим обеспечивается, что используемая в данный момент характеристическая карта Kf всегда соответствует текущим правилам.
В одной возможной конфигурации контроллер 30 с обратной связью управляет регулируемыми параметрами сопровождающей системы открытой добычи 5 - 16, 20, 48, 49, 51, 52, 60 избирательно, в зависимости от установленных правил, точнее, описанным выше способом.
В другой возможной конфигурации используется каскадное регулирование. Контроллер 30 с обратной связью производит оценку установленных правил вышеописанным способом, чтобы каждый подвижный компонент сопровождающей системы открытой добычи 5 -16, 20, 48, 49, 51, 52, 60 всегда оставался рядом в требуемом положении, т.е. отслеживал перемещения ведущей системы открытой добычи 2, 3, 4, 45, 46, 47, 54, 55 в пределах установленного допуска. Это – регулирование верхнего уровня. В качестве подчиненного регулирования осуществляется классическое регулирование положения подвижных компонентов сопровождающей системы открытой добычи 5 -16, 20, 48, 49, 51, 52, 60. Это классическое регулирование используется только для относительно небольших рассогласований, лежащих в пределах допуска, и поэтому во многих случаях линейная модель процесса достаточно точно описывает реальность, и параметры этой модели могут быть определены с относительно небольшими усилиями. Такое каскадное регулирование, включающее в себя регулирование верхнего уровня на основе системы правил и подчиненное регулирование, в частности, регулирование на основе модели или какой-либо другой известный способ регулирования, требует значительно меньше установленных правил, чем регулирование только на основе правил.
Ссылочные позиции
Изобретение относится к комплексу для открытой добычи, включающему в себя ведущую систему открытой добычи (2, 3, 4) и сопровождающую систему открытой добычи (5-20). Ведущая система открытой добычи (2, 3, 4) может перемещаться по земле в любом направлении. Сопровождающая система открытой добычи (5-20) может перемещаться относительно ведущей системы открытой добычи (2, 3, 4) по земле по меньшей мере в одном направлении таким образом, чтобы отслеживать перемещения ведущей системы открытой добычи (2, 3, 4). Контроллер (30) с обратной связью для обработки данных обрабатывает значения, измеренные датчиком, который измеряет положение сопровождающей системы открытой добычи (5-20) относительно ведущей системы открытой добычи (2, 3, 4), и регулирует регулируемый параметр сопровождающей системы открытой добычи (5-20). Регулируемая сопровождающая система открытой добычи отслеживает ведущую систему открытой добычи (2, 3, 4) так, чтобы обеспечивался непрерывный поток добываемой породы. Изобретение направлено на снижение риска возникновения ошибок во время работы комплекса для открытой добычи. 2 н. и 17 з.п. ф-лы, 10 ил.
1. Комплекс для открытой добычи полезных ископаемых, содержащий:
ведущую систему открытой добычи (2, 3, 4, 45, 46, 47, 54, 55) и
сопровождающую систему открытой добычи (5 - 16, 20, 48, 49, 51, 52, 60),
первый датчик (X1) и
контроллер (30) с обратной связью для обработки данных;
при этом ведущая система открытой добычи (2, 3, 4, 45, 46, 47, 54, 55) выполнена с возможностью извлекать, принимать и/или разгружать сыпучую добываемую породу,
сопровождающая система открытой добычи (5 - 16, 20, 48, 49, 51, 52, 60) выполнена с возможностью переноса сыпучей добываемой породы от ведущей системы открытой добычи (2, 3, 4, 45, 46, 47, 54, 55) и/или к ведущей системе открытой добычи (2, 3, 4, 45, 46, 47, 54, 55),
причем ведущая система открытой добычи (2, 3, 4, 45, 46, 47, 54, 55) способна перемещаться по земле в любом направлении и
по меньшей мере один компонент сопровождающей системы открытой добычи (5 - 16, 20, 48, 49, 51, 52, 60) способен перемещаться по земле относительно ведущей системы открытой добычи (2, 3, 4, 45, 46, 47, 54, 55) по меньшей мере в одном направлении,
при этом сопровождающая система открытой добычи (5 - 16, 20, 48, 49, 51, 52, 60) способна перемещаться посредством первого регулируемого параметра (U1);
первый датчик выполнен с возможностью измерения величины, которая коррелирует с положением, расстоянием, ориентацией и/или перемещением сопровождающей системы открытой добычи (5 - 16, 20, 48, 49, 51, 52, 60) относительно ведущей системы открытой добычи (2, 3, 4, 45, 46, 47, 54, 55);
причем контроллер (30) с обратной связью выполнен с возможностью автоматического регулирования первого регулируемого параметра (U1), используя по меньшей мере одно измеряемое первым датчиком (X1) значение (x1), таким образом, что
сопровождающая система открытой добычи (5 - 16, 20, 48, 49, 51, 52, 60) отслеживает перемещение ведущей системы открытой добычи (2, 3, 4, 45, 46, 47, 54, 55) так, что
обеспечивается непрерывный поток добываемой породы между указанными двумя системами открытой добычи (2 - 16, 20, 45 - 60),
отличающийся тем, что
контроллер (30) с обратной связью выполнен с возможностью автоматического выполнения ряда установленных оцениваемых с помощью компьютера правил (R1, R2) для регулирования по меньшей мере одного регулируемого параметра (U1, U2);
при этом каждое правило (R1, R2) содержит исходное условие (P1, P2) и по меньшей мере одно заключение (K1.1, K1.2, K2);
указанное исходное условие (P1, P2) содержит одиночное исходное условие или логическую комбинацию нескольких одиночных исходных условий (P1.1, P1.2, P2.1, P2.2);
причем по меньшей мере одиночное исходное условие (P1.1, P1.2, P2.1, P2.2) определяет нечеткое множество.
2. Комплекс для открытой добычи полезных ископаемых по п. 1, отличающийся тем, что контроллер (30) с обратной связью является контроллером на основе правил или содержит такой контроллер на основе правил, при этом указанное нечеткое множество указанного одиночного исходного условия, соответственно, определяет степень принадлежности для каждого возможного значения датчика, к которому относится указанное одиночное исходное условие.
3. Комплекс для открытой добычи полезных ископаемых по п. 1 или 2, отличающийся тем, что величина, полученная в результате измерения датчиком, т.е. значение датчика, приписывается по меньшей мере к одному нечеткому множеству лингвистической переменной посредством степени принадлежности.
4. Комплекс для открытой добычи полезных ископаемых по п. 2 или 3, отличающийся тем, что указанное исходное условие относится к нечеткому множеству и является допустимым, если степень принадлежности в отношении нечеткого множества больше нуля.
5. Комплекс для открытой добычи полезных ископаемых по любому из пп. 1-4, отличающийся тем, что содержит по меньшей мере второй датчик (X2, …, X4) и
сопровождающая система открытой добычи (5 - 16, 20, 48, 49, 51, 52, 60) содержит:
соединительный компонент (5 - 16, 48, 49, 51, 52) и
ведомый компонент открытой добычи (20, 60);
причем комплекс для открытой добычи выполнен с возможностью переноса, с помощью соединительного компонента (5 - 16, 48, 49, 51, 52), сыпучей добываемой породы с ведущей системы открытой добычи (2, 3, 4, 45, 46, 47) к ведомому компоненту открытой добычи (20) и/или с ведомого компонента открытой добычи (60) к ведущей системе открытой добычи (54, 55);
причем соединительный компонент (5 - 16, 48, 49, 51, 52)
способен перемещаться по земле относительно ведущей системы открытой добычи (2, 3, 4, 45, 46, 47, 54, 55) по меньшей мере в одном направлении и
способен перемещаться посредством первого регулируемого параметра (U1);
причем ведомый компонент открытой добычи (20)
способен перемещаться по земле относительно соединительного компонента (5 - 16, 48, 49, 51, 52) по меньшей мере в одном направлении и
способен перемещаться посредством второго регулируемого параметра (U2);
при этом первый датчик (X1) выполнен с возможностью измерения величины, которая коррелирует с положением, расстоянием, ориентацией и/или перемещением соединительного компонента (5 - 16, 20, 48, 49, 51, 52) относительно ведущей системы открытой добычи (2, 3, 4, 45, 46, 47, 54, 55);
второй датчик (X2) выполнен с возможностью измерения величины, которая коррелирует с расстоянием, ориентацией и/или перемещением ведомого компонента открытой добычи (20) относительно соединительного компонента (5 - 16, 48, 49, 51, 52);
контроллер (30) с обратной связью выполнен с возможностью:
- автоматического регулирования первого регулируемого параметра (U1), используя по меньшей мере одно измеряемое первым датчиком (X1) значение (x1), так чтобы соединительный компонент (5 - 16, 48, 49, 51, 52) отслеживал перемещение ведущей системы открытой добычи (2, 3, 4, 45, 46, 47, 54, 55); и
- автоматического регулирования второго регулируемого параметра (U2), используя по меньшей мере одно измеряемое вторым датчиком (X2) значение (x2), так чтобы ведомый компонент открытой добычи (20, 60) отслеживал перемещение соединительного компонента (5 - 16, 48, 49, 51, 52);
контроллер (30) с обратной связью также выполнен с возможностью управления операциями так, чтобы обеспечивался непрерывный поток добываемой породы
между соединительным компонентом (5 - 16, 48, 49, 51, 52) и ведомым компонентом открытой добычи (20, 60), а также
между соединительным компонентом (5 - 16, 48, 49, 51, 52) и ведущей системой открытой добычи (2, 3, 4, 45, 46, 47, 54, 55).
6. Комплекс для открытой добычи полезных ископаемых по любому из пп. 1-5, отличающийся тем, что
каждая система открытой добычи (2 - 16, 20 - 60), соответственно, содержит конвейерное устройство (3, 5, 13, 13.1, 13.2, 22, 46, 48, 51, 54);
причем комплекс для открытой добычи выполнен таким образом, что
- одно конвейерное устройство (5, 13, 13.1, 13.2, 22, 46, 51) является разгрузочным конвейерным устройством, а другое конвейерное устройство (13, 13.1, 13.2, 48, 51, 54) является принимающим конвейерным устройством; и
- разгрузочное конвейерное устройство (5, 13, 13.1, 22, 46, 51) способно отводить сыпучую добываемую породу на принимающее конвейерное устройство (13, 13.2, 48, 51, 54);
первый датчик (X1) выполнен с возможностью измерения величины, которая коррелирует с положением принимающего конвейерного устройства (13, 13.1, 13.2, 48, 51, 54) относительно разгрузочного конвейерного устройства (5, 13.1, 46, 51); и
контроллер (30) с обратной связью выполнен с возможностью автоматического регулирования первого регулируемого параметра (U1), используя по меньшей мере одно измеряемое первым датчиком (X1) значение (x1), так чтобы
сопровождающая система открытой добычи (5 - 16, 20, 48, 49, 51, 52, 60) отслеживала перемещение ведущей системы открытой добычи (2, 3, 4, 45, 46, 47, 54, 55) таким образом, чтобы
разгрузочное конвейерное устройство (13, 13.1, 13.2, 22, 46, 51) всегда располагалось над принимающим конвейерным устройством (5, 13, 13.1, 13.2, 48, 51, 54).
7. Комплекс для открытой добычи полезных ископаемых по любому из пп. 1-6, отличающийся тем, что
ведущая система открытой добычи (2, 3, 4, 45, 46, 47, 54, 55) содержит:
добывающее устройство (2), в частности, приводное ковшовое колесо (2) роторного многоковшового экскаватора (1), для извлечения добываемой породы;
разгрузочный ленточный конвейер (55) отвалообразователя (50) для отвода добываемой породы, в частности избыточной, и/или
бункер (45) передвижной дробилки (43) для измельчения поступающей добываемой породы.
8. Комплекс для открытой добычи полезных ископаемых по любому из пп. 1-7, отличающийся тем, что
сопровождающая система открытой добычи (5 - 16, 20, 48, 49, 51, 52, 60) содержит:
подвижное конвейерное устройство (13, 13.1, 13.2), в частности самоходный перегружатель (10, 10.1, 10.2) или транспортно-отвальный мост для переноса сыпучей добываемой породы;
подвижный лоток, в частности саморазгружающуюся вагонетку (20), для направления сыпучей добываемой породы на отводящее устройство (22); и/или
ленточный перегружатель (60) для транспортировки и выгрузки сыпучей добываемой породы.
9. Комплекс для открытой добычи полезных ископаемых по любому из пп. 1-8, отличающийся тем, что содержит приемную систему (1, 43), в частности роторный многоковшовый экскаватор (1) или передвижную дробилку (43);
при этом приемная система (1, 43) содержит:
приемное устройство (2, 45), способное перемещаться в любом направлении по земле;
соединительно-передающее устройство (3, 4, 46, 47); и
отводящее конвейерное устройство (5, 6, 48, 49), которое способно перемещаться посредством первого регулируемого параметра (U1);
причем приемная система (1, 54) выполнена с возможностью:
- приема добываемой породы с помощью приемного устройства (2, 45);
- транспортировки принимаемой добываемой породы с помощью соединительно-передающего устройства (3, 4, 46, 47) на отводящее конвейерное устройство (5, 6, 48, 49); и
- отвода добываемой породы с помощью отводящего конвейерного устройства (5, 6, 48, 49);
отводящее конвейерное устройство (5, 6, 48, 49) способно перемещаться относительно соединительно-передающего устройства (3, 4, 46, 47), в частности, способно поворачиваться относительно горизонтальной и/или вертикальной оси;
при этом первый датчик (X1) выполнен с возможностью измерения величины, которая коррелирует с положением, расстоянием, ориентацией и/или перемещением отводящего конвейерного устройства (5, 6) относительно соединительно-передающего устройства (3, 4, 46, 47);
при этом контроллер (30) с обратной связью выполнен с возможностью автоматического регулирования первого регулируемого параметра (U1), используя по меньшей мере одно измеряемое первым датчиком (X1) значение (x1), таким образом, чтобы
отводящее конвейерное устройство (5, 6, 48, 49) отслеживало перемещение соединительно-передающего устройства (3, 4, 46, 47), так чтобы
всегда обеспечивался непрерывный поток добываемой породы от соединительно-передающего устройства (3, 4, 46, 47) на отводящее конвейерное устройство (5, 6, 48, 49).
10. Комплекс для открытой добычи полезных ископаемых по любому из пп. 1-9, отличающийся тем, что
каждое одиночное исходное условие (P1.1, P1.2, P2.1, P2.2):
относится, соответственно, к датчику (X1, .., X4) комплекса для открытой добычи;
определяет диапазон возможных значений этого датчика (X1, .., X4); и
в зависимости от фактического значения (x1, …, x4) этого датчика (X1, .., X4), является, по меньшей мере, выполненным или невыполненным;
при этом каждое заключение (K1.1, K1.2, K2):
относится, соответственно, к регулируемому параметру (U1, U2) сопровождающей системы открытой добычи (5 - 16, 20, 48, 49, 51, 52, 60); и
определяет по меньшей мере одно управляющее воздействие (u1, u2, u3) для этого регулируемого параметра (U1, U2); и
контроллер (30) с обратной связью выполнен с возможностью инициирования управляющего воздействия (u1, u2, u3), определяемого заключением (K1.1, K1.2, K2) правила (R1, R2), по меньшей мере, каждый раз, когда выполняется указанное одиночное исходное условие или указанная логическая комбинация одиночных исходных условий (P1.1, P1.2, P2.1, P2.2) этого правила (R1, R2).
11. Комплекс для открытой добычи полезных ископаемых по п. 10,
отличающийся тем, что
по меньшей мере одно одиночное исходное условие (P1.1, P1.2, P2.1, P2.2) установленного правила (R1, R2) определяет нечеткое множество (v1, …, v4),
которое, соответственно, присваивает каждому измеренному датчиком (X1, .., X4) возможному значению (x1, …, x4), к которому относится правило (R1, R2), степень принадлежности (Z1.1, Z1.2, Z2.1, Z2.2), которая представляет собой степень, в которой измеряемое датчиком значение (x1, …, x4) принадлежит нечеткому множеству;
причем контроллер (30) с обратной связью выполнен с возможностью вычисления для исходного условия (P1, P2) правила (R1, R2) степени выполнения (E1, E2) исходного условия (P1, P2), в зависимости от
измеренных датчиком значений (x1, …, x4) и
степени принадлежности (Z1.1, Z1.2, Z2.1, Z2.2) измеренных датчиком значений (x1, …, x4) к одиночным исходным условиям (P1.1, P1.2, P2.1, P2.2) исходного условия (P1, P2);
при этом контроллер (30) с обратной связью выполнен с возможностью
вычисления управляющего воздействия (u2, u3) для по меньшей мере одного регулируемого параметра (U1, U2);
причем управляющее воздействие (u2, u3) зависит от
заключений тех правил (R1, R2), которые относятся к этому регулируемому параметру (U1, U2), и
степеней выполнения (E1, E2) исходных условий (P1, P2) этих правил (R1, R2).
12. Комплекс для открытой добычи полезных ископаемых по п. 11, отличающийся тем, что
каждая степень принадлежности (Z1.1, Z1.2, Z2.1, Z2.2) представляет собой число, равное
нулю в случае невыполненных условий;
единице в случае выполненных условий;
значению от нуля до единицы для промежуточной степени принадлежности.
13. Комплекс для открытой добычи полезных ископаемых по п. 11 или 12, отличающийся тем, что
контроллер (30) с обратной связью выполнен с возможностью
расчета суммарного управляющего воздействия (u3), которое зависит от:
- указанных отдельных управляющих воздействий (u1, u3); и
- степеней выполнения (E1, E2) исходных условий (P1, P2) указанных различных правил (R1, R2),
если заключения указанных различных правил (R1, R2)
относятся к одному и тому же регулируемому параметру (U1) и
определяют вместе по меньшей мере два различных управляющих воздействия (u1, u3).
14. Комплекс для открытой добычи полезных ископаемых по любому из пп. 10-13, отличающийся тем, что содержит генератор (32) характеристической карты, а контроллер (30) с обратной связью содержит блок (33) оценки характеристической карты;
при этом генератор (32) характеристической карты выполнен с возможностью генерирования оцениваемой с помощью компьютера характеристической карты (Kf) в зависимости от установленных правил (R1, R2);
причем сгенерированная характеристическая карта (Kf) присваивает, соответственно, каждой возможной комбинации полученных с помощью датчиков значений (x1, …, x4)
управляющее воздействие (u1, u2, u3),
комбинацию управляющих воздействий (u1, u2, u3) или
определение, что данной комбинации значений (x1, …, x4) не присваивается никакое управляющее воздействие;
причем блок (33) оценки характеристической карты выполнен с возможностью оценки вычисленной характеристической карты (Kf) в зависимости от измеренных датчиком значений (x1, …, x4) и
контроллер (30) с обратной связью выполнен с возможностью использования оценки характеристической карты (Kf) для регулирования по меньшей мере одного регулируемого параметра (U1, U2) в зависимости от измеренных датчиком значений (x1, …, x4).
15. Комплекс для открытой добычи полезных ископаемых по любому из пп. 10-13,
отличающийся тем, что контроллер (30) с обратной связью выполнен с возможностью осуществления регулирования верхнего уровня и подчиненного регулирования;
при этом контроллер (30) с обратной связью выполнен с возможностью
выполнения регулирования верхнего уровня путем применения правил (R1, R2), чтобы сопровождающая система открытой добычи (5 - 16, 20, 48, 49, 51, 52, 60) отслеживала перемещение ведущей системы открытой добычи (2, 3, 4, 45, 46, 47, 54, 55) таким образом, чтобы положение сопровождающей системы открытой добычи (5 - 16, 20, 48, 49, 51, 52, 60) относительно ведущей системы открытой добычи (2, 3, 4, 45, 46, 47, 54, 55) оставалось в заданном диапазоне, и
выполнения подчиненного регулирования посредством использования заданной модели процесса, чтобы
сопровождающая система открытой добычи (5 - 16, 20, 48, 49, 51, 52, 60), положение которой сохраняется в заданном диапазоне, отслеживала перемещение ведущей системы открытой добычи (2, 3, 4, 45, 46, 47, 54, 55) таким образом, чтобы
обеспечивался непрерывный поток добываемой породы между указанными двумя системами открытой добычи (2 - 16, 20, 45 - 60).
16. Способ работы комплекса для открытой добычи полезных ископаемых по п. 1,
включающий операции, при которых
ведущая система открытой добычи (2, 3, 4, 45, 46, 47, 54, 55) извлекает, принимает и/или разгружает сыпучую добываемую породу;
сопровождающая система открытой добычи (5 -16, 20, 48, 49, 51, 52, 60) переносит сыпучую добываемую породу от ведущей системы открытой добычи (2, 3, 4, 45, 46, 47, 54, 55) и/или к ведущей системе открытой добычи (2, 3, 4, 45, 46, 47, 54, 55);
ведущая система открытой добычи (2, 3, 4, 45, 46, 47, 54, 55) перемещается по земле в первом направлении в первый момент времени и во втором направлении в последующий второй момент времени, причем второе направление отличается от первого направления;
при этом в первый и второй моменты времени:
- по меньшей мере один компонент сопровождающей системы открытой добычи (5 - 16, 20, 48, 49, 51, 52, 60) перемещается по земле относительно ведущей системы открытой добычи (2, 3, 4, 45, 46, 47, 54, 55);
- первый датчик (X1) измеряет величину, которая коррелирует с положением, расстоянием, ориентацией и/или перемещением сопровождающей системы открытой добычи (5 - 16, 20, 48, 49, 51, 52, 60) относительно ведущей системы открытой добычи (2, 3, 4, 45, 46, 47, 54, 55);
- контроллер (30) с обратной связью автоматически регулирует первый регулируемый параметр (U1), используя, соответственно, по меньшей мере одно измеренное первым датчиком (X1) значение (x1), таким образом, что
сопровождающая система открытой добычи (5 - 16, 20, 48, 49, 51, 52, 60) отслеживает соответствующее перемещение ведущей системы открытой добычи (2, 3, 4, 45, 46, 47, 54, 55) таким образом, что
обеспечивается непрерывный поток добываемой породы между указанными двумя системами открытой добычи (2 - 16, 20, 45 - 60);
при этом контроллер (30) с обратной связью автоматически выполняет ряд установленных, оцениваемых с помощью компьютера, правил (R1, R2) для регулирования по меньшей мере одного регулируемого параметра (U1, U2);
при этом каждое правило (R1, R2) содержит исходное условие (P1, P2) и по меньшей мере одно заключение (K1.1, K1.2, K2);
исходное условие (P1, P2) содержит одиночное исходное условие или логическую комбинацию нескольких одиночных исходных условий (P1.1, P1.2, P2.1, P2.2);
причем по меньшей мере одиночное исходное условие (P1.1, P1.2, P2.1, P2.2) определяет нечеткое множество.
17. Способ по п. 16, отличающийся тем, что контроллер (30) с обратной связью является контроллером на основе принятых правил или содержит такой контроллер, при этом нечеткое множество одиночного исходного условия, соответственно, определяет степень принадлежности для каждого возможного значения, измеренного датчиком, к которому относится указанное одиночное исходное условие.
18. Способ по п. 16 или 17, отличающийся тем, что комплекс для открытой добычи содержит по меньшей мере второй датчик (X2, …, X4), и
сопровождающая система открытой добычи (5 - 16, 20, 48, 49, 51, 52, 60) содержит:
соединительный компонент, (5 - 16, 48, 49, 51, 52), который способен перемещаться с помощью первого регулируемого параметра (U1), и
ведомый компонент открытой добычи (20, 60), который способен перемещаться посредством второго регулируемого параметра (U2);
причем указанный способ содержит операции, при которых
соединительный компонент (5 - 16, 48, 49, 51, 52) передает сыпучую добываемую породу с ведущей системы открытой добычи (2, 3, 4, 45, 46, 47) к ведомому компоненту открытой добычи (20) и/или с ведомого компонента открытой добычи (60) к ведущей системе открытой добычи (54, 55);
в оба момента времени первый датчик (X1) измеряет величину, которая коррелирует с положением, расстоянием, ориентацией и/или перемещением соединительного компонента (5 - 16, 48, 49, 51, 52) относительно ведущей системы открытой добычи (2, 3, 4, 45, 46, 47);
в оба момента времени второй датчик (X2, …, X4) измеряет величину, которая коррелирует с положением, расстоянием, ориентацией и/или перемещением ведомого компонента открытой добычи (20, 60) относительно соединительного компонента (5 - 16, 48, 49, 51, 52);
в оба момента времени контроллер (30) с обратной связью автоматически регулирует первый регулируемый параметр (U1), используя по меньшей мере одно измеренное первым датчиком (X1) значение (x1), таким образом, чтобы соединительный компонент (5 - 16, 48, 49, 51, 52) отслеживал перемещение ведущей системы открытой добычи (2, 3, 4, 45, 46, 47, 54, 55); и
в оба момента времени контроллер (30) с обратной связью автоматически регулирует второй регулируемый параметр (U2), используя по меньшей мере одно значение (x2, …, x4), измеренное вторым датчиком (X2, …, X4), таким образом, чтобы ведомый компонент открытой добычи (20, 60) отслеживал перемещение соединительного компонента (5 - 16, 48, 49, 51, 52);
при этом контроллер (30) с обратной связью выполняет операции регулирования таким образом, что по меньшей мере в оба момента времени обеспечивается непрерывный поток добываемой породы между соединительным компонентом (5 - 16, 48, 49, 51, 52) и ведомым компонентом открытой добычи (20, 60), а также между соединительным компонентом (5 - 16, 48, 49, 51, 52) и ведущей системой открытой добычи (2, 3, 4, 45, 46, 47, 54, 55).
19. Способ по любому из пп. 16-18, отличающийся тем, что предварительно устанавливают указанный ряд оцениваемых с помощью компьютера правил (R1, R2),
причем каждое одиночное исходное условие (P1.1, P1.2, P2.1, P2.2) установленных правил:
относится, соответственно, к датчику (X1, .., X4) комплекса для открытой добычи;
определяет диапазон возможных значений этого датчика (X1, .., X4); и
в зависимости от фактического значения (x1, …, x4), измеренного данным датчиком (X1, .., X4), является, по меньшей мере, выполненным или невыполненным;
каждое заключение (K1.1, K1.2, K2):
относится, соответственно, к регулируемому параметру (U1, U2) сопровождающей системы открытой добычи (5 - 16, 20, 48, 49, 51, 52, 60) и
определяет по меньшей мере одно управляющее воздействие (u1, u2, u3) для этого регулируемого параметра (U1, U2); и
этап, на котором контроллер (30) с обратной связью производит регулирование регулируемого параметра (U1, U2), включает в себя операции, на которых
контроллер (30) с обратной связью инициирует управляющее воздействие (u1, u2, u3), определяемое заключением (K1.1, K1.2, K2) правила (R1, R2), по меньшей мере, каждый раз, когда выполняется указанное одиночное исходное условие или указанная логическая комбинация одиночных исходных условий (P1.1, P1.2, P2.1, P2.2) этого правила (R1, R2).
| WO 2010037215 A1, 08.04.2010 | |||
| ЭКСКАВАЦИОННО-ПОГРУЗОЧНЫЙ КОМПЛЕКС НА ОСНОВЕ ДРАГЛАЙНА | 1993 |
|
RU2099475C1 |
| Свеклоуборочная машина | 1931 |
|
SU26486A1 |
| WO 9908947 A1, 25.02.1999 | |||
| WO 2007057305 A1, 24.05.2007 | |||
| WO 2009114106 A2, 17.09.2009 | |||
| Майкл Гэлетакис и др | |||
| APPLICATIONS OF FUZZY INFERENCE SYSTEMS IN MINERAL INDUSTRY- OVERVIEW | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Nova Science Publishers, Inc | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |

