Техническое решение относится к рельсовому транспорту и предназначено для замедления вагонов и отцепов из них на сортировочных станциях.
Известен вагонный замедлитель (патент на полезную модель RU №177917), содержащий направляющий цилиндр, внутри которого размещен с возможностью скольжения и вращения гидроцилиндр с поршнем и полым штоком. Внутри штока расположен шаговый электродвигатель, который по командам диспетчерского контроллера поворачивает роторный золотник, изменяющий усилие задвижения гидроцилиндра. Недостатком описываемого устройства является ступенчатость регулировки усилия задвижения гидроцилиндра. Так, согласно описанию, вагонный замедлитель позволяет дистанционно задавать только три уровня усилия. Однако для прицельного замедления вагонов и отцепов, имеющих различную массу и скорость, предпочтительна возможность плавной регулировки усилия сопротивления вагонного замедлителя.
Такое устройство описано в патенте на изобретение RU №2737178. Согласно описанию данного патента амортизатор вагонного замедлителя включает цилиндро-поршневой блок с цилиндром, поршнем, аксиально подвижным в цилиндре и штоком, герметично выведенным из цилиндра на одном его конце. По одному из конструктивных вариантов описываемый вагонный замедлитель снабжен устройством уменьшения амортизирующей силы, которое содержит кольцевой электродвигатель, приводящий в движение ходовой винт по командам внешнего блока управления. Ходовой винт при осевом перемещении, воздействуя на пружинный пакет, изменяет силу прижима опорной пластины к запорному элементу поршя, тем самым изменяя гидросопротивление перетеканию рабочей жидкости через каналы поршня, в результате чего изменяется усилие перемещения выдвижного блока. Это позволяет плавно менять поглощаемую энергию при контакте выдвижного блока с колесом вагона.
После выполнения торможения до полной остановки скатывающихся с сортировочной горки вагонов и отцепов с помощью описываемых вагонных замедлителей, производится перемещение вагонов и отцепов на парковых путях маневровым локомотивом для формирования составов. Для этого вагонные замедлители дистанционно переводят в режим минимального усилия задвижения выдвижного блока, чтобы не создавать помех движению маневровых локомотивов и буксируемых ими вагонов.
Однако, при этом отсутствует визуальное подтверждение перехода описываемых вагонных замедлителей в режим минимального сопротивления, так как их выдвижные цилиндры остаются в максимально выдвинутом положении. Машинист маневрового локомотива вынужден проезжать участки путей с точечными замедлителями на сниженной скорости для уменьшения риска подскока легких вагонов и схода их с рельсов от контакта с выдвижными цилиндрами замедлителей в случае сбоя в исполнении команды на переход в режим минимального сопротивления.
Таким образом маневровые работы выполняются на пониженных скоростях, что уменьшает перерабатывающую способность сортировочной горки, и при этом сохраняется риск аварийной ситуации от подскока вагонов на замедлителях не перешедших в режим минимального сопротивления при отказах системы управления или исполнительных элементов внутри амортизаторов вагонных замедлителей.
Описанное устройство наиболее близко к предлагаемому техническому решению и выбрано в качестве прототипа.
Технической проблемой, решаемой предлагаемым устройством, является повышение безопасности маневровых работ при одновременном увеличении перерабатывающей способности сортировочной горки.
Для решения указанной технической проблемы предлагается дистанционно управляемый точечный вагонный замедлитель, содержащий корпус с элементами крепления к рельсу и скользящий гидроцилиндр, выполненный с возможностью осевого и вращательного перемещения в корпусе. Скользящий гидроцилиндр имеет возможность перемещения в заданные положения не полного рабочего хода с помощью дистанционно управляемого привода. Причем выходное звено дистанционно управляемого привода контактирует с упором, соединенным через подшипник со скользящим гидроцилиндром. При этом упор выполнен с возможностью выхода из контакта с выходным звеном дистанционно управляемого привода при задвижении скользящего гидроцилиндра внутрь корпуса под действием колеса вагона.
Предлагаемое устройство позволяет получить технический результат, который заключается в повышении безопасности маневровых работ при одновременном увеличении перерабатывающей способности сортировочной горки.
Общими признаками предлагаемого устройства и прототипа по патенту RU №2737178 является наличие корпуса со скользящим гидроцилиндром и дистанционно управляемого привода.
Отличием является то, что в прототипе дистанционно управляемый привод воздействует на пружинный пакет, изменяя силу прижима опорной пластины к запорному элементу поршя, в результате чего изменяется гидросопротивление перетекания рабочей жидкости через каналы поршня и как следствие меняется усилие перемещения выдвижного блока. В предлагаемом устройстве выходное звено дистанционно управляемого привода воздействует через упор и подшипник на скользящий гидроцилиндр, перемещая его в заданные положения неполного рабочего хода. Таким образом в прототипе плавное изменение поглощаемой энергии достигается за счет изменения усилия задвижения выдвижного блока, а в предлагаемом устройстве изменение поглощаемой энергии достигается изменением величины рабочего хода скользящего гидроцилиндра.
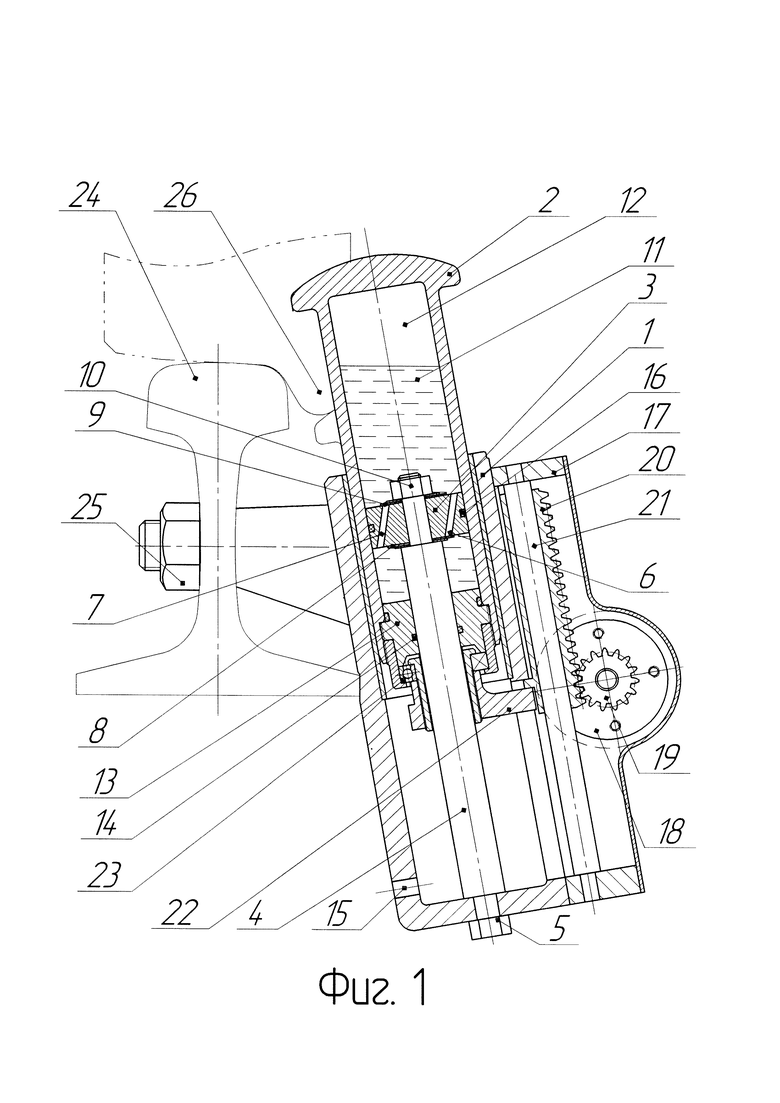
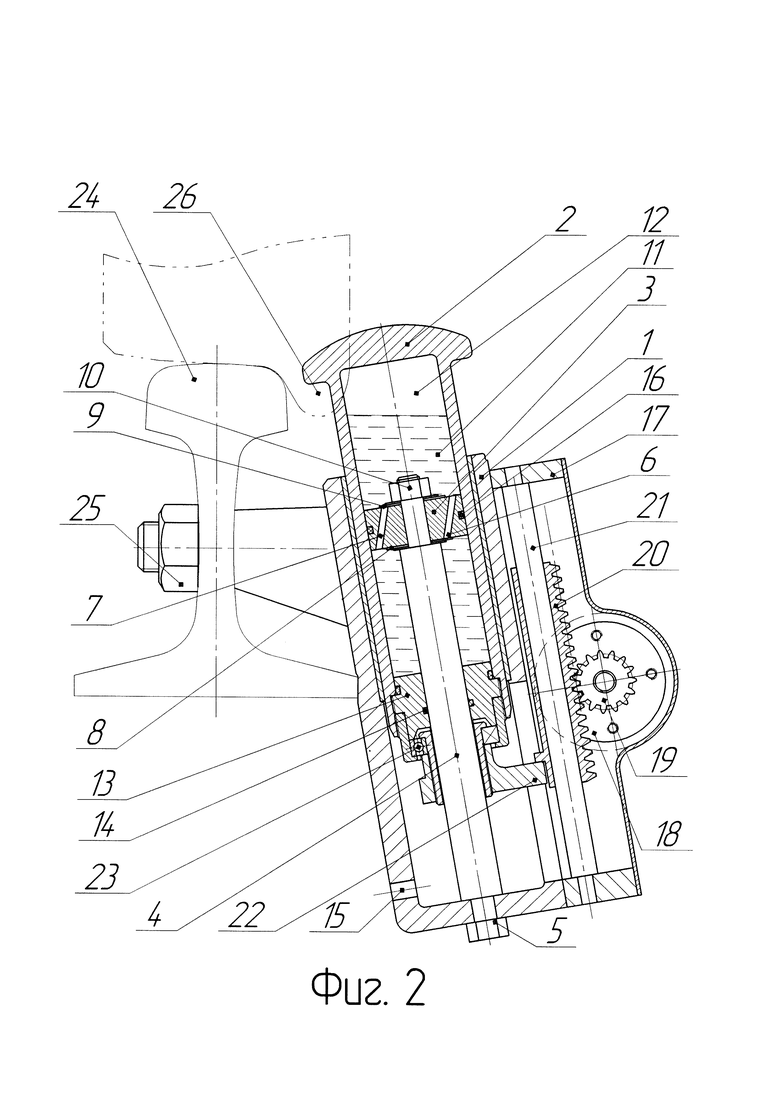
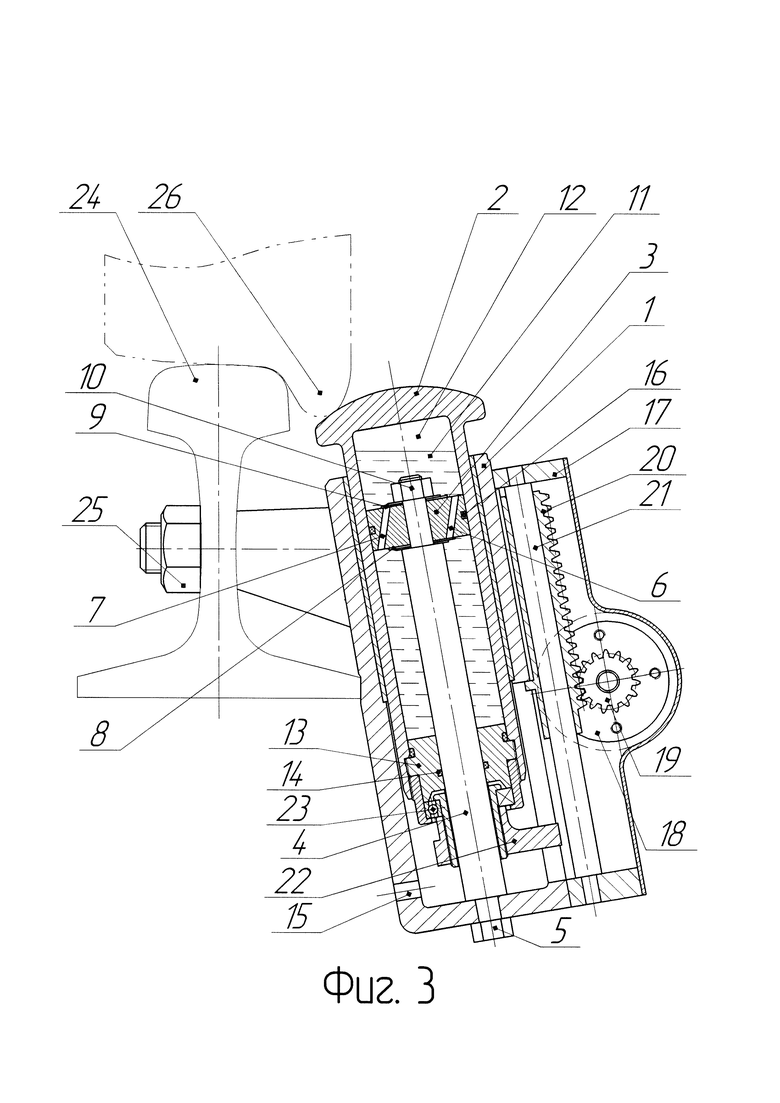
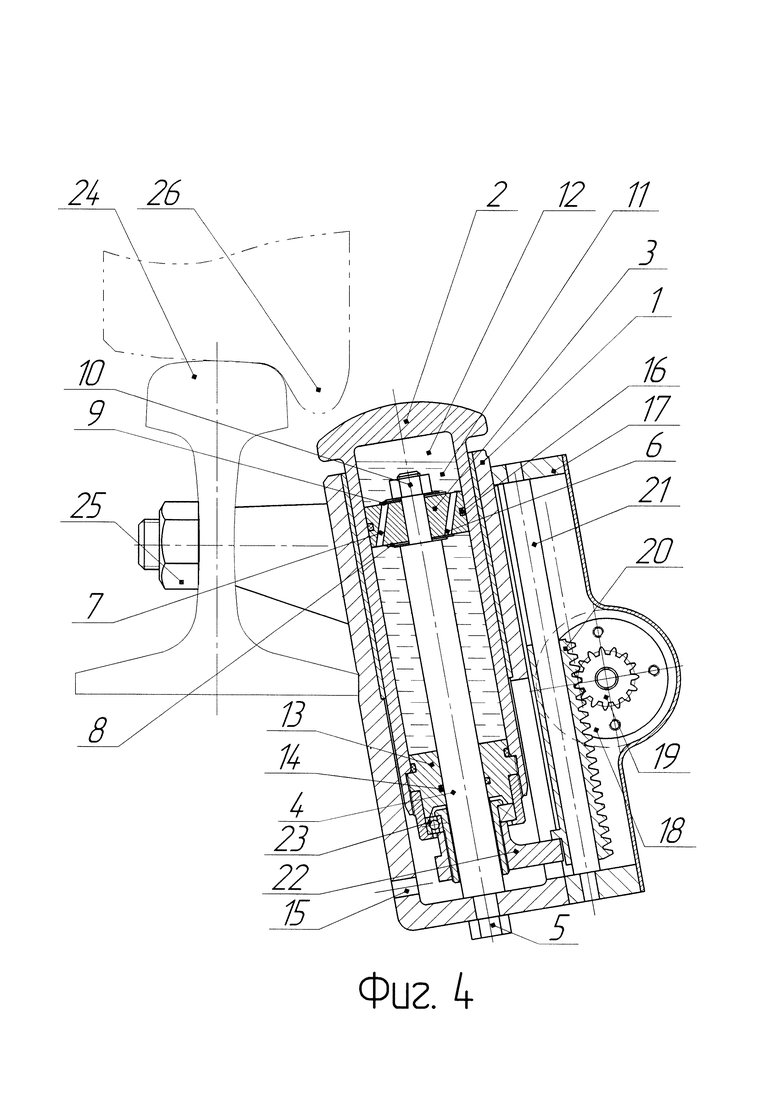
Предлагаемое техническое решение иллюстрируется чертежами фиг.1, 2, 3 и 4. На фиг.1 показан общий вид дистанционно управляемого точечного вагонного замедлителя. На фиг.2 показано устройство переведенное в положение не полного рабочего хода под действием дистанционно управляемого привода. На фиг.3 устройство изображено с задвинутым скользящим гидроцилиндром по действием колеса вагона. На фиг.4 предлагаемый дистанционно управляемый точечный вагонный замедлитель изображен в положении полностью задвинутого скользящего гидроцилиндра, при котором колеса вагона при проезде не контактируют со скользящим гидроцилиндром.
В соответствии с фиг.1 дистанционно управляемый точечный вагонный замедлитель содержит корпус 1 со скользящим гидроцилиндром 2, выполненным с возможностью осевого и вращательного перемещения в корпусе. Внутреннее устройство гидроцилиндра может быть различным с получением одинакового технического результата. В качестве одного из возможных примеров конкретного исполнения на чертеже изображена конструкция скользящего гидроцилиндра, в котором установлен поршень 3, закрепленный на одном конце штока 4, другой конец которого зафиксирован в нижней части корпуса, например, с помощью гайки 5. В поршне 3 имеются два ряда проходных отверстий 6 и 7, сообщающие верхнюю и нижнюю полости гидроцилиндра 2. Для открывания и перекрывания проходных отверстий 6 и 7 имеются пластинчатые пружины 8 и 9 соответственно, выполненные в виде известных упругих дисков, надетых центральным отверстием на шейку штока 4 и зажатые с помощью гайки 10.
Скользящий гидроцилиндр 2, заполненный жидкостью 11 и в верхней части газом 12 под давлением, снабжен направляющей втулкой 13 с отверстием и уплотнением 14 под шток. Воздушная полость нижней части корпуса 1 сообщается с атмосферой, с помощью отверстия 15. Поршень имеет поршневое уплотнение 16.
На корпусе 1 закреплен дистанционно управляемый привод 17, который может быть электрическим, пневматическим или гидравлическим с получением одинакового технического результата. В качестве примера конкретного конструктивного исполнения на чертеже показан электрический привод, включающий электродвигатель 18 с шестерней 19 на валу, которая сопрягается с зубчатой рейкой 20, являющейся выходным звеном описываемого дистанционно управляемого привода. Зубчатая рейка 20 имеет возможность перемещаться по направляющей 21 и контактирует с упором 22, соединенным через подшипник 23 со скользящим гидроцилиндром 2. При этом упор выполнен с возможностью выхода из контакта с зубчатой рейкой при задвижении скользящего гидроцилиндра внутрь корпуса под действием колеса вагона, как показано на фиг.3. Устройство крепится к рельсу 24, как вариант, с помощью известных резьбовых элементов крепления 25.
Предлагаемый дистанционно управляемый точечный вагонный замедлитель работает следующим образом. На сортировочной станции каждый из необходимого количества вагонных замедлителей устанавливается на рельсовых участках торможения вагонов с помощью резьбовых элементов крепления 25. В зависимости от скорости и массы движущегося вагона задают величину поглощения его кинетической энергии путем подачи с диспетчерского поста управляющего сигнала на привод 17 каждого вагонного замедлителя, учитывая их количество. Вращением шестерни 19 на валу электродвигателя 18 привода перемещают зубчатую рейку 20, которая воздействуя через упор 22 и подшипник 23 передвигает скользящий цилиндр 2 и останавливает его в нужном положении полного или неполного рабочего хода, как показано на фиг.2. В качестве электродвигателя, который способен выполнить необходимое количество оборотов шестерни в соответствии с управляющим сигналом, может быть применен серводвигатель или шаговый двигатель. При встрече движущегося вагона или отцепа с установленным на рельсе вагонным замедлителем гребень 26 колеса вагона нажимает на выступающий над рельсом скользящий гидроцилиндр 2, задвигая его внутрь корпуса 1.
В процессе задвижения скользящий гидроцилиндр перемещается относительно поршня 3. Рабочая жидкость проходит из верхней полости гидроцилиндра в нижнюю через отверстия 6 в поршне путем упругого отгибания краев пластинчатой пружины 8 (пакета пластинчатых пружин). Перетекание рабочей жидкости 11 происходит с гидросопротивлением, что приводит к возникновению тормозящей силы, действующей на колесо вагона и замедлению вагона. Компенсирование объема задвигающегося штока 4 происходит путем сжатия газа 12 в верхней части гидроцилиндра. Задвижение гидроцилиндра вызывает также вытеснение воздуха из нижней части корпуса 1 через отверстие 15.
После проезда колеса через вагонный замедлитель скользящий гидроцилиндр 2 выдвигается в исходное положение под действием сжатого газа 12. При этом отогнутые пластинчатые пружины 8 выпрямляются, перекрывая отверстия 6, и жидкость перетекает обратно из нижней полости гидроцилиндра в верхнюю полость через проходные отверстия 7, отгибая края пластинчатых пружин 9. Процесс выдвижения скользящего гидроцилиндра 2 в исходное положение сопровождается поступлением в нижнюю часть корпуса 1 воздуха через отверстие 15. Описанный цикл задвижения и выдвижения скользящего гидроцилиндра повторяется для остальных колес вагона или отцепа, чем достигается замедление вагона или отцепа до требуемой скорости.
Величина поглощения кинетической энергии замедляемых вагонов выбирается с обязательным выполнением условия исключения аварийной ситуации подскока над рельсами колес быстрых и легких вагонов. Так как на сортировочной станции замедляются вагоны и отцепы разной массы и скорости, то требуется менять величину поглощаемой энергии вагонными замедлителями, чтобы погасить до требуемой величины скорость конкретных вагонов или отцепов, а также для устранения аварийной ситуации подскока легких и быстрых вагонов. Подшипник 23 необходим для обеспечения вращения скользящего гидроцилиндра 2 относительно упора 22 и корпуса 1, что позволяет уменьшить износ колес вагонов и контактирующих с ними участков скользящего цилиндра. При этом наибольшее количество кинетической энергии вагонов будет поглощаться при макимально выдвинутом положении скользящего цилиндра.
При выполнении перемещения вагонов и отцепов маневровым локомотивом, все вагонные замедлители, установленные на участках следования маневрового локомотива по команде с диспетчерского пункта переводятся приводом 17 в полностью задвинутое положение, при котором проезжающие колеса не контактируют с верхней частью скользящего гидроцилиндра 2, как показано на фиг.4. При этом машинист локомотива имеет визуальное подтверждение перехода вагонных замедлителей в полностью задвинутое положение и может выполнять маневровые работы на повышенной скорости без риска возникновения аварийной ситуации подскока легких вагонов.
Таким образом предлагаемый дистанционно управляемый точечный вагонный замедлитель позволяет повысить безопасность маневровых работ при одновременном увеличении перерабатывающей способности сортировочной горки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вагонный замедлитель | 1990 |
|
SU1787841A1 |
| ДВУХРЕЛЬСОВЫЙ ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ | 2003 |
|
RU2258622C2 |
| ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ | 2002 |
|
RU2242390C2 |
| ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ | 2008 |
|
RU2360816C1 |
| Способ управления технологическим процессом железнодорожной станции | 2020 |
|
RU2738779C1 |
| ЗАМЕДЛИТЕЛЬ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 1989 |
|
RU2036813C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ МАНЕВРОВОЙ СОРТИРОВОЧНОЙ ГОРКИ, А ТАКЖЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ УКАЗАННОЙ ГОРКИ | 2016 |
|
RU2677546C1 |
| ТОРМОЗ ТЕЛЕЖКИ РЕЛЬСОВОГО ЭКИПАЖА | 2013 |
|
RU2543128C2 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗОМ ГРУЗОВОГО ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2011 |
|
RU2476340C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ МАНЕВРОВОЙ СОРТИРОВОЧНОЙ ГОРКИ, А ТАКЖЕ УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ УКАЗАННОЙ ГОРКИ | 2016 |
|
RU2673913C1 |
Изобретение относится к рельсовому транспорту и предназначено для замедления вагонов и отцепов из них на сортировочных станциях. Дистанционно управляемый точечный вагонный замедлитель содержит корпус со скользящим гидроцилиндром, выполненным с возможностью осевого и вращательного перемещения в корпусе. Скользящий гидроцилиндр имеет возможность перемещения в заданные положения не полного рабочего хода с помощью дистанционно управляемого привода. Выходное звено дистанционно управляемого привода контактирует с упором, соединенным через подшипник со скользящим гидроцилиндром. Упор выполнен с возможностью выхода из контакта с выходным звеном дистанционно управляемого привода при задвижении скользящего гидроцилиндра внутрь корпуса под действием колеса вагона. В результате повышается безопасность маневровых работ при одновременном увеличении перерабатывающей способности сортировочной горки. 4 ил.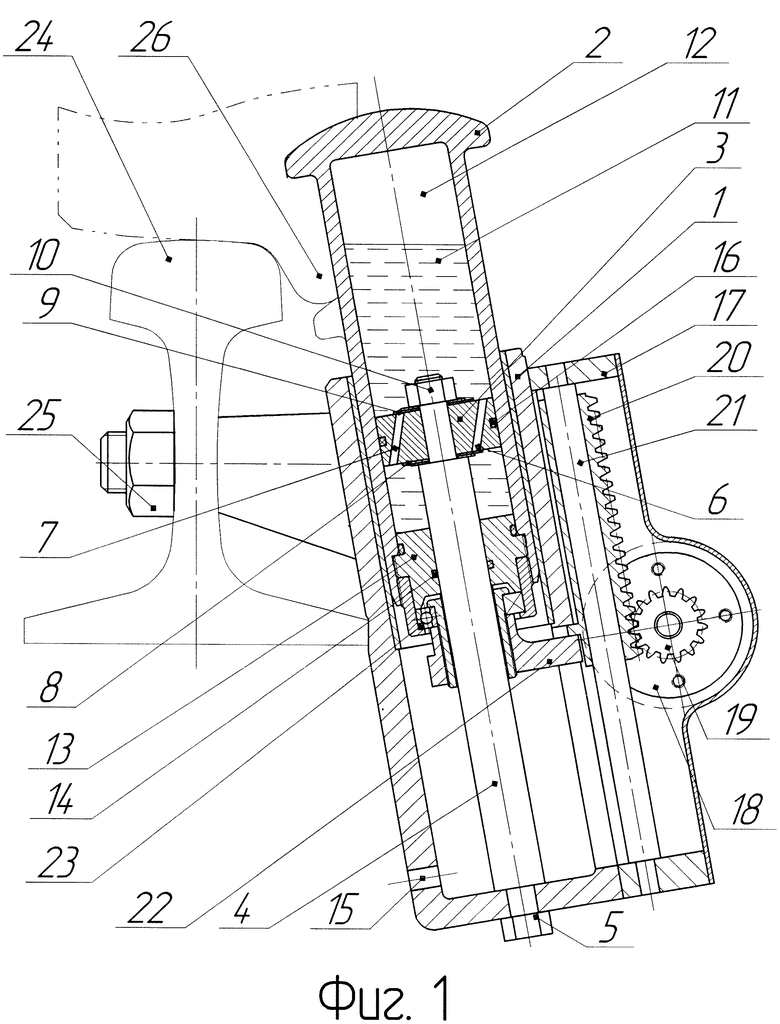
Дистанционно управляемый точечный вагонный замедлитель, содержащий корпус со скользящим гидроцилиндром, выполненным с возможностью осевого и вращательного перемещения в корпусе, отличающийся тем, что скользящий гидроцилиндр выполнен с возможностью перемещения в заданные положения не полного рабочего хода с помощью дистанционно управляемого привода, выходное звено которого контактирует с упором, соединенным через подшипник со скользящим гидроцилиндром, при этом упор выполнен с возможностью выхода из контакта с выходным звеном дистанционно управляемого привода при задвижении скользящего гидроцилиндра внутрь корпуса под действием колеса вагона.
| АМОРТИЗАТОР ВАГОННОГО ЗАМЕДЛИТЕЛЯ | 2017 |
|
RU2737178C2 |
| Вагонный замедлитель | 1990 |
|
SU1787841A1 |
| МНОГОФАЗНЫЙ СТАТИЧЕСКИЙ ПОЛУПРОВОДНИКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 0 |
|
SU208793A1 |
| FR 1487902 A, 07.07.1967. | |||
