Изобретение относится к области винтовых летательных аппаратов, а именно к трансмиссии многовинтового летательного аппарата.
Из существующего уровня техники известен летательный аппарат с гидравлическим приводом несущих винтов с фиксированным шагом лопастей (патент на полезную модель RU181367U1, B64C27/12, опубл. 11.07.2018). Каждый независимый контур привода содержит насосную станцию, включающую основной регулируемый насос и нерегулируемый насос подпитки с блоком обратно-предохранительных и редукционного клапанов, исполнительный гидромотор, приводящий во вращение соответствующий ему воздушный винт, напорные и сливные гидролинии.
Недостатком такого решения является увеличение массы летательного аппарата, обусловленное наличием четырех регулируемых насосов в гидросистеме с индивидуальными фильтрами.
Наиболее близким к заявленному техническому решению (прототипом) является многовинтовой летательный аппарат с гидравлическим приводом (патент на полезную модель RU205086U1, B64C 27/12, опубл. 28.06.2021), включающий основной регулируемый насос и нерегулируемый насос подпитки с блоком обратно-предохранительных и редукционного клапанов, четыре исполнительных гидромотора, связанные с соответствующим воздушным винтом, напорные и сливные гидролинии. За счёт использования одного регулируемого насоса для питания нескольких гидромоторов, такая компоновка позволяет облегчить массу летательного аппарата.
Недостатком прототипа является статическая ошибка, обусловленная взаимным влиянием контуров друг на друга при различной нагрузке на исполнительных гидродвигателях, которая может возникнуть вследствие неточности изготовления, неравномерного износа подшипников, изменении геометрии или шага винтов, а также при воздействии внешних возмущающих воздействий.
Задача изобретения – обеспечение нечувствительности к нагрузке многовинтового летательного аппарата путём внедрения в гидропривод чувствительной к нагрузке системы регулирования.
Техническим результатом заявляемого изобретения является исключение взаимного влияния контуров гидропривода друг на друга, повышение КПД и устойчивости полёта многовинтового летательного аппарата с сохранением массогабаритных характеристик.
Поставленная задача решается, а технический результат достигается тем, что в гидроприводе, содержащем насосную станцию, включающую основной регулируемый насос и насос подпитки с блоком обратно-предохранительных и редукционного клапанов, четыре гидромотора, выходной вал каждого из которых соединён с соответствующим ему воздушным винтом, напорные и сливные гидролинии, в отличие от прототипа дополнительно содержится чувствительная к нагрузке система регулирования, включающая клапаны постоянного перепада давления, дросселирующие золотникии клапаны «или», причем клапаны постоянного перепада давления соединены с дросселирующими золотниками, а также через клапаны «или» с регулятором насоса.
Технический результат достигается благодаря тому, что регулирование насоса осуществляется как по давлению, так и по расходу, что повышает КПД системы, клапаны постоянного перепада давления на дросселирующих распределителях поддерживают постоянный перепад давления, клапаны «или» отслеживают изменение давления на гидромоторах и передают его регулятору насоса, который соответствующим образом изменяет расход, обеспечивая тем самым независимость частоты вращения гидромоторов от действующих на них нагрузок.
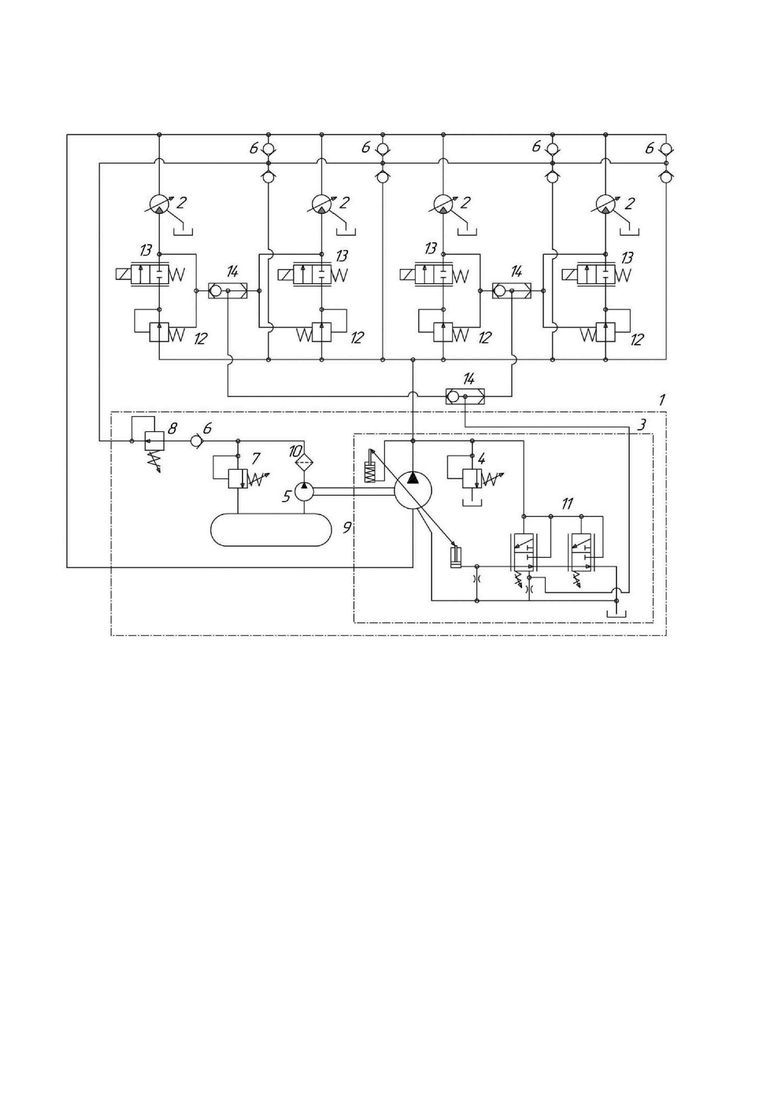
Сущность изобретения поясняется чертежом, на котором изображена схема гидравлическая принципиальная гидропривода многовинтового летательного аппарата.
Гидропривод винтового летательного аппарата содержит насосную станцию 1 и четыре регулируемых гидромотора 2. В состав насосной станции 1 входят: основной регулируемый насос 3, предохранительный клапан 4, нерегулируемый насос подпитки 5 с обратными клапанами 6 и переливным клапаном 7, редукционный клапан 8, бак 9 и фильтр 10. Гидропривод содержит также систему регулирования, включающую регулятор насоса 11, клапаны постоянного перепада давления 12 и дросселирующие золотники 13, находящиеся в напорных линиях регулируемых гидромоторов2, клапаны «или» 14.
Основной регулируемый насос 3, соединённый с предохранительным клапаном 4 посредством напорных гидролиний, связан общим валом или через коробку отбора мощности с насосом подпитки 5, который соединен гидролинями с обратными клапанами 6, переливным клапаном 7, редукционным клапаном 8, баком 9, фильтром 10, контурами привода воздушных винтов, содержащих клапаны постоянного перепада давления 12, дросселирующие золотники 13 и гидромоторы2. Напорные линии каждого гидромотора, через клапаны «или» 14 соединены с регулятором 11 основного регулируемого насоса.
Гидропривод винтового летательного аппарата работает следующим образом. Рабочая жидкость из линии низкого давления подается насосом 3 к гидромоторам2. Регулирование подачи насоса 3 осуществляется электрогидравлическим регулятором 11. Каждый гидромотор2 имеет возможность дистанционно изменять характерный рабочий объем (частоту вращения вала гидромотора, а значит и частоту вращения несущего винта летательного аппарата). Предохранительный клапан 4 предотвращает поломку гидропривода вследствие перегрузки. Всасывая жидкость из бака 9 насос подпитки 5, через редукционный клапан 8 компенсирует объёмные утечки в гидромашинах и устранят возможные кавитационные процессы в системе. Переливной клапан 7 устанавливает максимальное давление подпитки, а обратные клапаны 6 предотвращают перетекание рабочей жидкости от областей с высоким давлением в области с низким давлением. При отсутствии сигналов управления пружины дросселирующих золотников 13 выставляют золотники в нейтральное положение (как показано на чертеже). Давление и расход от насоса поступают к дросселирующим золотникам 13, но так как проходные сечения золотников закрыты, то связанное с этим повышение давления, посредством воздействия на поршень управляющего цилиндра насоса 3 выводит насос на минимальную производительность, а гидромоторы2 не вращаются. При подаче управляющего сигнала на электромагниты дросселирующих золотников 13, золотники перемещаются пропорционально входящему сигналу, и рабочая жидкость поступает на вход гидромоторов, давление перед дросселирующими золотниками 13 падает, клапан постоянного перепада давления 12 фиксирует это падение давления и открывается, пропуская расход и создавая давление, достаточное для преодоления внешней нагрузки. В результате открытия клапана давление до него падает и поршень управляющего цилиндра регулятора 11 основного насоса 3 перемещается под действием силы натяжения пружины, рабочий объём насоса увеличивается. Под действием перепада давления частота вращения гидромоторов увеличивается пропорционально управляющему сигналу согласно программе управления. Номинальное давление в системе регулирования устанавливается в соответствии с текущей нагрузкой, для чего с помощью клапанов «или» 14, отбирается давление из наиболее нагруженного контура и сообщается на регулятор насоса 11. Регулятор выставляет давление питания, достаточное для преодоления внешней нагрузки и обеспечивающее наилучшие энергетические характеристики.
Заявляемое изобретение позволяет улучшить устойчивость полёта и энергетическую эффективность многовинтового летательного аппарата, за счет исключения взаимного влияния гидравлических контуров друг на друга, путем использования в гидроприводе чувствительной к нагрузке системы регулирования. Это позволяет обеспечить независимость работы привода при изменении нагрузки на выходных валах гидромоторов и необходимый индивидуальный расход и давление на каждый гидромотор.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мультироторная летающая платформа с гидроприводом вращения несущих винтов | 2022 |
|
RU2799957C1 |
| РЕГУЛЯТОР ПОТОКА | 2005 |
|
RU2310104C2 |
| РЕГУЛИРУЕМОЕ ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО СОЛНЕЧНОГО ТРЕКЕРА | 2023 |
|
RU2803919C1 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| ОБЪЕМНО-ЗАМКНУТЫЙ ГИДРОПРИВОД | 2006 |
|
RU2318148C1 |
| ГИДРООБЪЕМНЫЙ ПРИВОД ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА, СИСТЕМА АВТОМАТИЧЕСКОЙ СМЕНЫ РАБОЧЕЙ ЖИДКОСТИ ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА, НАСОСНЫЙ АГРЕГАТ ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА, СИСТЕМА КОНДИЦИОНИРОВАНИЯ И РЕВЕРСА ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА И ГИДРОМОТОРНЫЙ АГРЕГАТ ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2108507C1 |
| ГИДРОПРИВОД САМОХОДНОЙ МАШИНЫ | 2004 |
|
RU2269429C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА БРОНИРОВАННОЙ РЕМОНТНО-ЭВАКУАЦИОННОЙ МАШИНЫ | 2014 |
|
RU2553620C1 |
| Объемный гидропривод самоходной транспортной машины | 1982 |
|
SU1079481A1 |
| ГИДРАВЛИЧЕСКИЙ БЛОК РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 2020 |
|
RU2730560C1 |
Изобретение относится к трансмиссии многовинтового летательного аппарата. Гидропривод содержит насосную станцию, включающую основной регулируемый насос и насос подпитки с блоком обратно-предохранительных и редукционного клапанов, четыре гидромотора, напорные и сливные гидролинии. Выходной вал каждого гидромотора соединён с соответствующим ему воздушным винтом. Дополнительно гидропривод содержит клапаны постоянного перепада давления, дросселирующие золотники и клапаны «или». Причем клапаны постоянного перепада давления соединены с дросселирующими золотниками, а также через клапаны «или» с регулятором насоса. Достигается улучшение устойчивости полёта и энергетическая эффективность многовинтового летательного аппарата. 1 ил.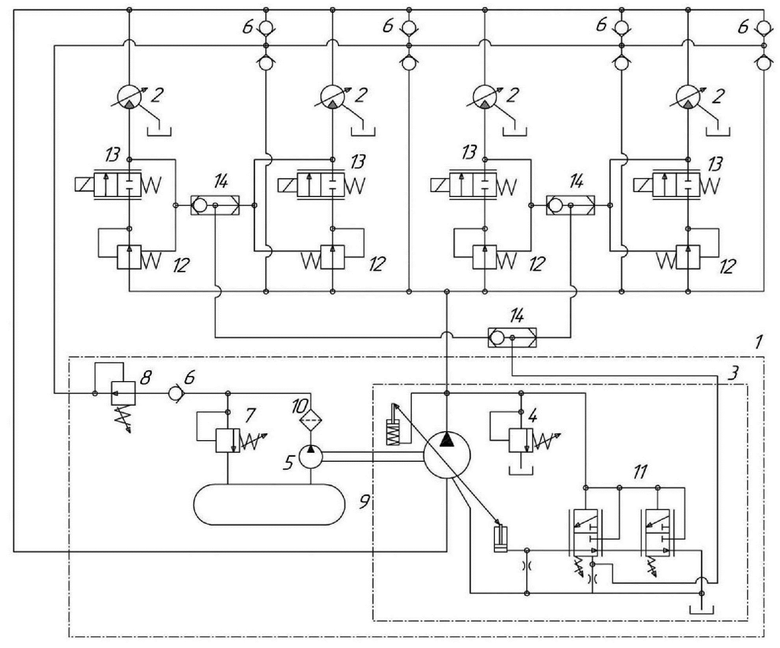
Гидропривод, содержащий насосную станцию, включающую основной регулируемый насос и нерегулируемый насос подпитки с блоком обратно-предохранительных и редукционного клапанов, четыре исполнительных регулируемых гидромотора, выходной вал каждого из которых соединен с соответствующим воздушным винтом, напорные и сливные гидролинии, отличающийся тем, что дополнительно содержит чувствительную к нагрузке систему регулирования, включающую клапаны постоянного перепада давления, дросселирующие золотники и клапаны «или», причем клапаны постоянного перепада давления соединены с дросселирующими золотниками, а также через клапаны «или» с регулятором насоса.
| ЖАРОСТОЙКИЙ ПРОВОДНИК | 1962 |
|
SU205086A1 |
| Гидропривод для колесных транспортных машин | 1982 |
|
SU1096135A1 |
| US 20230020058 A1, 19.01.2023 | |||
| US 11084576 B2, 10.08.2021. | |||

