Устройство для позиционирования тела пользователя, при этом устройство может быть интегрировано в сиденье или кушетку или может использоваться в качестве накладки (опорной поверхности), содержащее элемент сиденья, элемент спинки, имеющий модуль тазового и поясничного отделов позвоночника, и вычислительный блок, при этом элемент спинки соединен с элементом сиденья, причем модуль тазового и поясничного отделов позвоночника содержит по меньшей мере один регулировочный элемент и по меньшей мере один датчик, а элемент сиденья содержит по меньшей мере один регулировочный элемент и по меньшей мере три датчика, при этом датчики соединены с вычислительным блоком и предназначены для регистрации давлений на сидение и накладку пользователя в элементе сиденья и в модуле тазового и поясничного отделов позвоночника, при этом вычислительный блок соединен с регулировочными элементами и предназначен для оценки давлений на сидение и накладку, а также для активирования регулировочных элементов.
Изобретение также относится к способу управления таким устройством.
Пользователи часто не осознают свою индивидуальную осанку, когда стоят, сидят и лежат, и принимают позы, которые вызывают односторонние болезненные мышечные контрактуры и, в долгосрочной перспективе, при неправильной нагрузке вертебральной и тазовой структуры могут привести к износу, включая грыжу межпозвоночных дисков. В частности, длительное сидение требует постоянной удерживающей работы мышц, часто при неправильной осанке и без достаточных компенсирующих движений, что вызывает мышечный дисбаланс и различные телесные заболевания.
Таз пользователя играет центральную роль в предотвращении неправильной осанки и достижении оптимального положения тела. Устройства для позиционирования таза широко известны в области эргономики. В US20170086588A1 раскрыта воздушно-камерная система, содержащая два латерально разнесенных воздушно-камерных по бокам элемента, которые интегрированы в поверхность на сидение сидения и которые при неравномерном сидении позиционируют таз сидящего пользователя, выравнивания его седалищных бугров посредством подачи или удаления воздуха посредством компрессора. Область воздушно-камерных элементов выполнена подвижной, в результате чего может регулироваться положение бедра пользователя. В воздушно-камерные элементы встроены датчики контактного давления, которые регистрируют давления на сидение, которые седалищные бугры пользователя оказывают на поверхность сиденья. Контроллер оценивает давление на сидение и управляет компрессором в соответствии с оценкой.
В устройстве для позиционирования тела согласно известному уровню техники регистрируются только давления на сидение седалищных бугров пользователя и осуществляется их позиционирование, а также позиционирование бедра. Однако, у этого устройства есть несколько недостатков.
Чтобы добиться улучшенного положения тела в сидячем положении, копчик пользователя в вертикальном сидячем положении должен быть свободен от нагрузки. Это не может быть реализовано простым измерением давлений седалищных бугров и их расположения, поэтому устройство предшествующего уровня техники улучшает осанку пользователя лишь в ограниченной степени. Кроме того, позиционирование пользователя осуществляется по существу только относительно сагиттальной оси, а это означает, что невозможно предотвратить изменения кривизны позвоночника, такие как кифоз. Кроме того, размещение бедра пользователя в по существу вертикальном сидячем положении не дает достаточной возможности позиционирования таза таким образом, чтобы можно было улучшить осанку в области позвоночника.
Другой недостаток известных устройств, таких как инвалидные коляски, связан с тем, что анатомически целесообразная опора (поддержка) в области грудного отдела позвоночника не учитывается достаточным образом или не учитывается совсем, что способствует развитию кифоза. Если этот недостаток совпадает с отсутствием в устройстве элементов сиденья, способствующих осанке, это приводит, особенно для пожилых или неподвижных людей, к вредным для здоровья проблемам.
Поэтому задача изобретения состоит в том, чтобы предоставить устройство и способ для позиционирования тела пользователя, которые исключают недостатки предшествующего уровня техники.
Эта задача решается посредством предоставления устройства для позиционирования тела пользователя с признаками пункта 1 формулы изобретения и способа позиционирования тела с признаками пункта 9 формулы изобретения.
Настоящее изобретение предоставляет устройство для позиционирования тела пользователя, в котором первый и второй датчик и третий датчик предназначены для регистрации давления на сидение для первого и второго седалищных бугров и давления на сидение копчика, когда пользователь находится в по существу вертикальном сидячем положении, при этом первый и второй седалищные бугры определяют уровень седалищного бугра, регулировочный элемент элемента сиденья предназначен для выравнивания уровня седалищного бугра по горизонтали относительно сагиттальной оси пользователя в случае различий давления на сидение и/или накладку, после чего регулировочный элемент модуля тазового и поясничного отделов позвоночника предназначен для наклона таза пользователя относительно его горизонтальной оси до тех пор, пока давление на сидение и/или давление копчика не станет по существу нулевым. Кроме того, в области крестца и копчика пользователя, когда пользователь переводится из по существу вертикального сидячего положения в положение с наклоном относительно горизонтальной оси пользователя, возникают давления на сидение и/или накладку в зависимости от наклонного положения последнего, при этом в лежачем положении тела в области крестца возникают по существу максимальные давления на сидение и/или накладку. Наличие дополнительного, третьего датчика в элементе сиденья и датчика в модуле тазового и поясничного отделов позвоночника в области крестца пользователя позволяет регистрировать помимо давлений на сидение седалищных бугров пользователя, также давление на сидение и/или накладку копчика и крестца. Это имеет то преимущество, что на устройстве могут регистрироваться силы, которые в продольном направлении вдоль позвоночника пользователя из-за неправильной осанки или во время процесса перекатывания таза пользователя, путем регулировочных перемещений регулировочных элементов с целью позиционирования тела, или во время изменения наклона элемента спинки, переносится от позвоночника пользователя через его крестец на копчик и седалищные бугры. На основе давления на сидение и/или накладку копчика регулировочные элементы модуля тазового и поясничного отделов позвоночника могут наклонять таз пользователя таким образом, чтобы копчик практически не подвергался нагрузке. Это решает проблему устройств для позиционирования тела в соответствии с предшествующим уровнем техники, в которых датчики только регистрируют давления на сидение седалищных бугров пользователя и выравнивают седалищные бугры, но не учитывают наклон таза, который является важной частью позиционирования тела, и, следовательно, копчик при неправильной осанке может подвергаться высоким давлениям на сидение. Благодаря наличию датчика для регистрации давления копчика и датчика для регистрации давления в области крестца, можно регистрировать процесс перекатывания таза при перемещении пользователя в направлении лежачего положения, из-за различия давления на сидение и/или накладку в зависимости от наклона положения при изменяющемся положении сидя или лежа.
Другое преимущество достигается тем, что настоящее изобретение может быть интегрировано в уже существующее сиденье или кушетку или использоваться в качестве накладки на сидение на стул или кровать. Это приводит к большому количеству возможных применений, при этом устройство не ограничивается следующими примерами. Устройство можно, например, интегрировать в следующее оборудование: офисные кресла, инвалидные коляски, автомобильные сиденья, детские удерживающие системы, тренажеры, матрасы или в области реабилитации и терапии, в частности в вертикализаторы, кровати с функцией вертикализации и/или в операционные кровати.
Другое преимущество следует из того факта, что позиционирование тела с помощью регулировочных элементов элемента сиденья и элемента спинки может происходить плавным и саморегулирующимся образом за счет собственного веса пользователя и/или за счет его собственных движений. Кроме того, вычислительный блок, который активирует регулировочные элементы, может управляться самим пользователем и/или, в случае пожилых неподвижных людей, третьими лицами, такими как лицо, осуществляющее уход.
Согласно предпочтительному варианту осуществления устройства для позиционирования тела пользователя, элемент спинки предпочтительно имеет модуль грудного отдела позвоночника из трех компонентов и модуль шейного отдела позвоночника и головы, при этом модуль грудного отдела позвоночника с нижележащим модулем тазового и поясничного отделов позвоночника и модуль шейного отдела позвоночника и головы с нижележащим модулем грудного отдела позвоночника, могут быть соединены предпочтительно механически, посредством заполненных текучей средой каналов, или электрически, проводным или беспроводным соединением, установленным посредством Bluetooth или WLAN, и/или посредством их комбинации. Трехкомпонентный модуль грудного отдела позвоночника и предпочтительно четырехкомпонентный модуль тазового и поясничного отделов позвоночника обеспечивают то преимущество, что пользователи с серьезными нарушениями, такими как патологическая ротационная нестабильность позвоночника или сколиоз, могут сегментировано поддерживаться, располагаться и мобилизоваться. Другое преимущество состоит в том, что устройство предпочтительно обеспечивает меры по поддержке стабилизации и мобилизации без фиксации, что позволяет достичь улучшенного положения сидя и лежа в области таза и грудного отдела позвоночника. На шейный отдел позвоночника пользователя оказывается при этом косвенное воздействие через поддерживаемый грудной отдел позвоночника или плечевую зону, благодаря чему посредством индивидуально регулируемого модуля шейного отдела позвоночника и головы пользователя может достигаться дополнительная стабилизация и мобилизация.
Согласно предпочтительному варианту осуществления устройства для позиционирования тела пользователя, элемент спинки имеет дополнительные регулировочные элементы, например, для позиционирования и поддержки позвоночника в зоне перехода от лордоза к кифозу или для боковой поддержки неподвижных людей с нестабильностью туловища, которые выполнены для того, чтобы путем чередующихся и/или синхронных регулировочных движений, в частности, в области позвоночника, позиционировать пользователя в сагиттальном направлении относительно его продольной оси, при этом вычислительный блок предназначен для последовательного выполнения регулировочных движений в модуле тазового и поясничного отделов позвоночника, в модуле грудного отдела позвоночника и в модуле шейного отдела позвоночника и головы, при этом в уже позиционированных регулировочных элементах элемента сиденья и/или элемента спинки, по существу, не возникают различия давления на сидение и/или накладку или изменения положения тела. Это имеет то преимущество, что посредством регулировочных движений в виде чередующихся и/или синхронных движений вверх и вниз, формируются точки давления и/или зоны давления в тазовом и поясничном отделах позвоночника, грудном отделе позвоночника, в шейном отделе позвоночника и в области головы пользователя, посредством чего стимулируется работа проприоцептивных мышц, при этом чередующиеся движения оказывают давление на тело с одной стороны и в той же степени отступают с другой стороны, так что тело пользователя может реагировать на это компенсирующим движением и область спины позиционируется и мобилизуется. Чередующиеся регулировочные движения могут иметь положительный эффект в особенности в области сочленения между крестцом и тазом. Кроме того, регулировочные механизмы при активации обходят (оставляют свободными) остистые отростки пользователя. Еще одно преимущество заключается в том, что регулировочные движения стабилизируют тело пользователя сегментарно за счет обнаружения сегментарных различий давления на сидение и накладку в регулировочном элементе, функционально связанном с соответствующим регулировочным элементом, а обход остистых отростков может предотвратить то, что чувствительные к давлению остистые отростки подвергаются давлениям накладки во время позиционирования тела, что приводит к боли или патологическим изменениям в окружающих тканях тела. Кроме того, можно поддерживать область грудного отдела позвоночника по центру, чтобы выпрямить позвоночник, в результате чего лопатки могут располагаться мягче или глубже и посредством регулирующих элементов в области лопаток могут быть компенсированы ротационная нестабильность пользователя относительно его продольной оси. Дополнительно, за счет глубокого или мягкого расположения лопаток увеличивается свобода движений верхних конечностей. Поскольку наклон таза, при переходе к принятию или снятию нагрузки или свободы с копчика и крестца, и регулировочное движение модуля грудного отдела позвоночника в сагиттальном положительном и отрицательном направлении, заканчивается в том состоянии, в котором достигается распределение давления или положение таза, или оно остается по существу неизменным, достигается другое преимущество в том, что нейтральное положение таза может поддерживаться или определяться в любой момент времени в наклонном или лежачем положении тела. За счет наличия датчиков в элементе спинки, в особенности в модуле тазового и поясничного отделов позвоночника, можно обнаруживать нарушения осанки при повороте таза, которые можно компенсировать за счет регулировочных элементов в том же модуле, путем вращения вокруг продольной оси пользователя, до установки на гребне подвздошной кости пользователя однородного распределения давления. Другое преимущество достигается тем, что симметричное позиционирование таза может быть выполнено во всех трех плоскостях тела, в результате чего нижние конечности функционально отделены от костной структуры таза пользователя. Таким образом, укороченные стопы и перекос таза, которые вызывают неправильное расположение позвоночника при стоянии и ходьбе, могут быть компенсированы, при отсутствии фиксированных физических изменений. Однако, в случае фиксированных физических изменений корректирующие движения могут иметь положительный эффект. За счет индивидуального позиционирования или опоры таза и структуры позвоночника, а также их сегментарной мобилизации и стабилизации, можно исключить неправильное использование из-за незнания пользователем своей осанки. Другое преимущество настоящего изобретения заключается в том, что у пользователей с выраженным кифозом или сильным отклонением от «нормального» сагиттального положения позвоночника обеспечивается поддержка преимущественно в области поясничного отдела позвоночника и, по меньшей мере, в области перехода к грудному отделу позвоночника, по отношению к тазу, и, таким образом, ухудшение физического состояния можно отсрочить или даже предотвратить.
Согласно предпочтительному варианту осуществления устройства для позиционирования тела пользователя, устройство имеет ножной элемент, при этом ножной элемент соединен с элементом сидения и содержит дополнительные регулировочные элементы и датчики. Это имеет то преимущество, что, активируя регулировочные элементы, пользователь сохраняет нейтральное положение таза при перемещении его из положения сидя в положение лежа, при этом оно в наклонном положении или в положении тела лежа, принимая во внимание мышечное влияние нижних конечностей, в частности от верхней части бедра, которая непосредственно связана с тазом, для таза в наклонном положении задается тем, что пятки пользователя согласно его анатомическому костному строению находятся выше уровня его копчика, крестца или уровня седалищного бугра. Еще одним преимуществом регулировочных элементов ножного элемента является то, что их активация в сочетании с нейтральным положением таза пользователя может предотвратить венозный застой и создать своего рода «венозный насос». Ножной элемент может быть соединен с элементом сидения, предпочтительно механически, посредством заполненных текучей средой каналов, или электрически, проводным или беспроводным соединением, установленным посредством Bluetooth или WLAN, и/или посредством их комбинации.
Согласно предпочтительному варианту осуществления устройства для позиционирования тела пользователя регулировочные элементы содержат исполнительные механизмы, выбранные из группы механических, электрических, пневматических или гидравлических исполнительных механизмов, например, электрический серводвигатель, воздушный насос или гидравлический насос. За счет этого обеспечивается то преимущество, что тело пользователя можно позиционировать с помощью большого количества регулировочных элементов. Например, при использовании системы камер, заполненных текучей средой, пользователь может позиционироваться плавно, путем перераспределения текучей среды за счет его собственного веса или используя насосное устройство. Кроме того, электрические линейные приводы могут позиционировать пользователя, путем активации их соответствующим образом с помощью вычислительного блока. При этом достигается то преимущество, что не требуется никаких контуров управления, определяемых клапанами, например, в системе камер с принудительным управлением потоком. Для позиционирования тела также могут использоваться гидравлические линейные приводы. Это будет иметь то преимущество, что для позиционирования тела могут быть приложены большие силы, в результате чего неподвижные пользователи, в частности прикованные к постели и парализованные люди, могут быть точно позиционированы и мобилизованы. Однако, понятие регулировочных элементов не ограничивается вышеупомянутыми примерами.
Согласно предпочтительному варианту осуществления устройства для позиционирования тела пользователя датчики выполнены в виде механических, электрических, пневматических или гидравлических датчиков. Это имеет то преимущество, что давления на сидение и/или накладку пользователя можно определять с помощью большого количества датчиков. Например, при использовании системы камер, заполненных текучей средой, можно использовать датчики давления, которые регистрируют давления на сидение и/или накладку по разности давлений в камерах. Кроме того, механические датчики, такие как тензодатчики или также датчики ускорения, также могут быть использованы для регистрации давлений на сидение и/или накладку. Понятие датчиков не ограничивается приведенными выше примерами.
Способ согласно изобретению для управления устройством для позиционирования тела пользователя включает регистрацию давления на сидение и/или накладку седалищных бугров пользователя первым и вторым датчиками, оценку давлений на сидение и/или накладку и, в случае различий давления на сидение и/или накладку, активацию регулировочного элемента элемента сиденья вычислительным блоком, выравнивание уровня седалищного бугра пользователя по горизонтали относительно его сагиттальной оси, регистрацию давления на сидение копчика пользователя третьим датчиком элемента сиденья, оценку давления на сидение и/или накладку копчика пользователя вычислительным блоком, активацию регулировочного элемента модуля тазового и поясничного отделов позвоночника вычислительным блоком для наклона таза пользователя относительно его горизонтальной оси в положительном и/или отрицательном сагиттальном направлении, и прекращение регулировочного движения регулировочных элементов вычислительным блоком, как только давление на сидение и/или накладку копчика при наклоне по существу равно нулю. За счет регистрации области копчика и крестца пользователя, можно регистрировать, в частности, силы, которые действуют продольно вдоль позвоночника пользователя вследствие его неправильной осанки или во время процесса перекатывания таза, за счет регулировочных движений регулировочных элементов для позиционирования тела на устройстве. Дополнительно, на устройстве также могут быть зарегистрированы силы, которые из-за изменения наклона элемента спинки передаются от позвоночника пользователя к копчику и седалищному бугру через крестец пользователя. Наличие датчиков в модуле тазового и поясничного отделов позвоночника элемента спинки обеспечивает дополнительное преимущество в том, что можно обнаруживать ротационные нестабильности таза, которые можно компенсировать регулировочными элементами в том же модуле путем вращения вокруг продольной оси пользователя, до тех пока не будет достигнуто равномерное давление на сидение и/или накладку в области гребня подвздошной кости пользователя. Другое преимущество достигается тем, что наличие датчика для регистрации давления осадки и/или накладки копчика и датчика для регистрации давления на сидение и/или накладки крестца позволяет регистрировать перекат тазу во время перемещения пользователя, за счет различий давления на сидение и/или накладку в зависимости от наклона положения тела при изменении положения сидя или лежа. Таким образом, можно поддерживать нейтральное положение таза даже в положении лежа.
Согласно предпочтительному варианту осуществления способ позиционирования тела пользователя после выравнивания уровня седалищного бугра и наклона таза пользователя включает позиционирование и сагиттальную опору пользователя в области грудного отдела позвоночника путем активации регулировочных элементов модуля грудного отдела позвоночника с помощью вычислительного блока, при этом регулировочные движения обходят области остистых отростков, регистрацию различий давления на сидение и накладку датчиками элемента сиденья и элемента спинки, оценку давлений на сидение и накладку вычислительным блоком, прекращение регулировочного движения регулировочного элемента модуля грудного отдела позвоночника вычислительным блоком, как только будет обнаружено значительное различие давления на сидение и/или накладку в регулировочных элементах сиденья и/или в модуле тазового и поясничного отделов позвоночника, последующее позиционирование и сагиттальную поддержку пользователя в шейном отделе позвоночника и в области головы посредством активации регулировочных элементов модуля шейного отдела позвоночника и головы вычислительным блоком, прекращение регулировочного движения регулировочных элементов вычислительным блоком, как только регистрируется различия давления на сидение и/или накладку в регулировочных элементах модуль грудного отдела позвоночника. За счет этого достигается преимущество в том, что за счет чередования точек давления и/или областей давления в тазовом и поясничном отделах позвоночника, грудном отделе позвоночника, в области шейного отдела позвоночника и в области головы проприоцептивная мышечная работа может быть стимулирована регулировочными движениями, при этом движение оказывает давление на тело с одной стороны и с другой стороны отступает в одинаковой степени, так что тело реагирует на это компенсирующим движением, и за счет этого область спины пользователя может быть сегментарно мобилизована. Еще одно существенное преимущество состоит в том, что позиционирование таза пользователя осуществляется во всех трех плоскостях тела, так что можно принять нейтральное положение сидя. Еще одним преимуществом является отсутствие патологических точек давления в области копчика и крестца, которые из-за костной структуры могут привести к сильной боли и повреждению тканей, особенно в случае неподвижных пользователей.
Согласно одному варианту осуществления способ позиционирования тела пользователя осуществляется в наклонном положении элемента спинки. При этом достигается то преимущество, что позиционирование корпуса также может быть осуществлено в уже существующих устройствах, таких как автомобильные сиденья или сиденья самолета, поскольку эти устройства обычно имеют наклонный элемент спинки. Кроме того, пользователя с серьезными физическими нарушениями, такими как сколиоз, легче расположить, стабилизировать и мобилизовать в наклонном положении.
Согласно одному варианту осуществления способа регулировочные элементы активируются вычислительным блоком в одной точке на ножном элементе при наклонном положении элемента спинки и наклонном положении элемента сиденья до тех пор, пока пятка пользователя не окажется по меньшей мере на уровне седалищного бугра. Это имеет то преимущество, что можно предотвратить обусловленный наклоном таза пользователя в положительном сагиттальном направлении гиперлордоз и силы, действующие на позвоночник. Еще одно преимущество заключается в том, что путем активации регулировочных элементов ножного элемента можно поддерживать нейтральное положение таза пользователя в лежачем положении.
Согласно одному варианту осуществления способ позиционирования тела пользователя после позиционирования пользователя включает в себя изменение положения пользователя в циклических интервалах времени и/или в случае сегментной разности давлений предварительно заданных областей на сидение и накладку, активацию регулировочных элементов устройства в горизонтальной плоскости элемента спинки и/или элемента сиденья и/или ножного элемента в виде синхронных и/или чередующихся регулировочных движений сегментарно вверх и/или вниз последовательно или в любом порядке вдоль продольной оси, при этом синхронные регулировочные движения осуществляются как в положительном, так и в отрицательном сагиттальном направлениях, и чередующиеся регулировочные движения осуществляются в форме вращения вокруг продольной оси, причем регулировочное движение происходит с одной стороны в положительном сагиттальном направлении и с другой стороны в такой же степени в отрицательном сагиттальном направлении, активацию регулировочного элемента элемента сиденья в виде синхронных или чередующихся регулировочных движений, и активацию регулировочных элементов ножного элемента в виде синхронных и/или чередующихся регулировочных движений. За счет этого достигается преимущество, заключающееся в том, что позиционирование тела может осуществляться автоматически в определенном временном интервале или динамически, в частности, с саморегулированием из-за неправильного положения пользователя, которое создает слишком большую нагрузку на костные структуры тела. Кроме того, после сегментарного позиционирования области спины пользователя путем активации регулировочных элементов в виде последовательных регулировочных движений вдоль ножного элемента достигается то преимущество, что глубокие мышцы пользователя в непосредственной близости от его позвоночника стимулируются, и усиливается его правильная в этот момент индивидуальная осанка.
Устройство за счет опоры (поддержки) позвоночника и таза способно активировать точки давления и области, которые изменяют мышечный тонус, чтобы укрепить глубокие мышцы, тренировать осанку пользователя и постепенно улучшать состояние человека в направлении улучшенного, в частности вертикального выравнивания позвоночника по отношению к тазу. Нейтральное положение позвоночника и таза сохраняется при любом наклонном положении устройства.
Далее изобретение будет пояснено более подробно со ссылкой на чертежи, показывающие примеры осуществления.
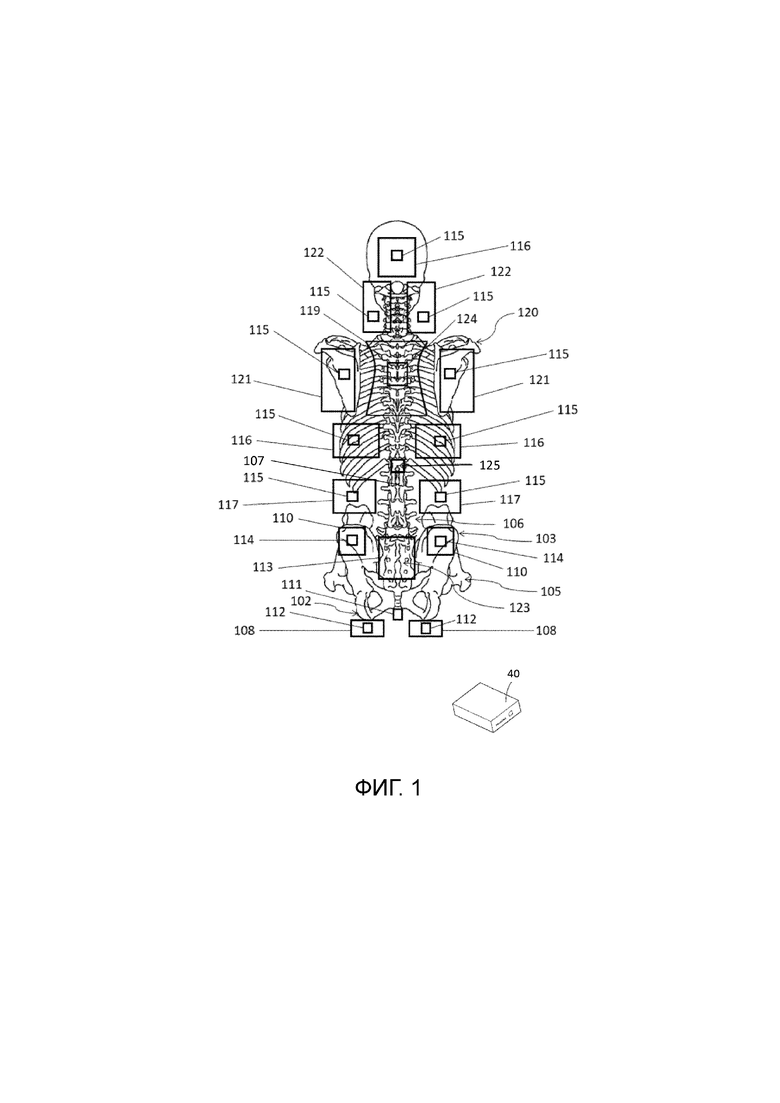
На фиг.1 показано схематическое изображение устройства согласно предпочтительному варианту осуществления изобретения.
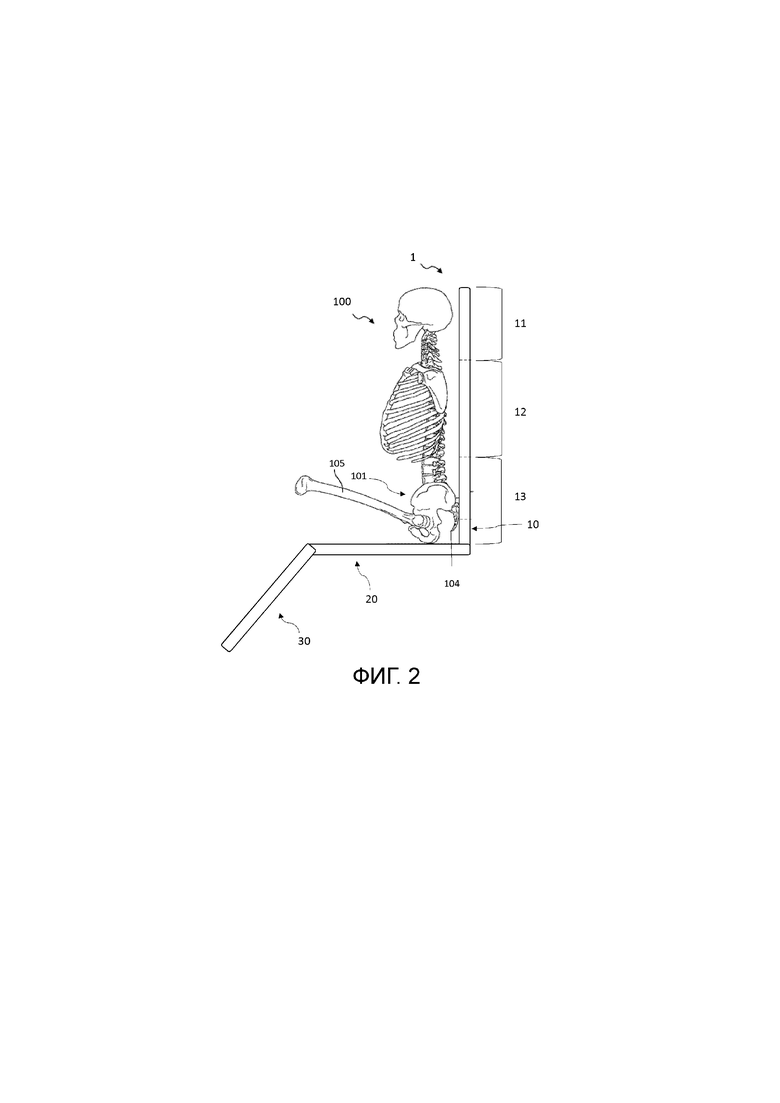
На фиг.2 показан вид сбоку устройства согласно фиг.1.
Далее изобретение подробно описано со ссылками на фигуры. На фиг.1 и 2 представлены схематические изображения устройства 1 для позиционирования тела пользователя 100 в положении сидя в соответствии с настоящим изобретением. Устройство 1 может быть встроено в сиденье или кушетку или использоваться в качестве накладки на кресле, кушетке или кровати и содержит элемент 20 сиденья, элемент 10 спинки, имеющий модуль 13 тазового и поясничного отделов позвоночника, и вычислительный блок 40. Элемент 10 спинки кроме того имеет модуль 12 грудного отдела позвоночника и модуль 11 шейного отдела позвоночника и головы, при этом модуль 12 грудного отдела позвоночника соединен с модулем 13 поясничного отдела позвоночника, модуль 11 шейного отдела позвоночника и головы 11 с модулем 12 грудного отдела позвоночника, а элемент 10 спинки с элементом 20 сидения, предпочтительно механически, через заполненные текучей средой каналы. Модуль 13 для тазового и поясничного отделов позвоночника содержит, по меньшей мере, четыре регулировочных элемента 117 и 110 и, по меньшей мере, три датчика 114 и 113, а элемент 20 сиденья - по меньшей мере, два регулировочных элемента 108 и, по меньшей мере, три датчика 111 и 112 давления, причем регулировочные элементы 108 являются выполнены в виде самонадувающихся, деформируемых и заполненных текучей средой камер и соединены между собой каналами с клапанами. Датчики 111 и 112, 114 и 113 давления предназначены для регистрации давлений на сидение и накладку пользователя 100, при этом вычислительный блок 40 соединен с упомянутыми камерами, в частности, с клапанами, а также с датчиками 111 и 112, 114 и 113 давления, при этом соединения не показаны на фигурах для ясности. За счет расположения в элементе 20 сидения датчики 112 давления выполнены для регистрации давления на сидение первого и второго седалищных бугров 102, причем первый и второй седалищные бугры 102 определяют уровень седалищного бугра. За счет расположения в элементе 20 сиденья датчик 111 давления выполнен для регистрации давления на сидение копчика 104 пользователя 100. Камеры элемента 20 сиденья выполнены для выравнивания уровня седалищного бугра по горизонтали относительно сагиттальной оси пользователя 100 в случае различий давлений на сидение, при этом текучая среда выпускается из камеры элемента 20 сиденья, имеющей более высокое внутреннее давление, и плавно вследствие собственного веса пользователя 100, посредством соединяющих камеры каналов накачивается в камеры модуля 13 тазового и поясничного отделов позвоночника. Датчики 114 и 113 давления в модуле 13 тазового и поясничного отделов позвоночника за счет их расположения в элементе 10 спинки выполнены для регистрации давления гребня 103 подвздошной кости и давления крестца 123. Камеры модуля 13 тазового и поясничного отделов позвоночника выполнены для наклона таза 101 пользователя 100 за счет перераспределенной текучей среды относительно его горизонтальной оси и его продольной оси, предпочтительно с обеих сторон попеременно или чередующимся образом, до тех пор, пока давление на сидение копчика 104, предпочтительно в вертикальном сидячем положении, в граничной области, когда копчик 104 нагружен и разгружен, имеет по существу нулевое значение, а различие давления накладки гребня 103 подвздошной кости пользователя в камерах 110 в области модуля тазового и поясничного отделов позвоночника практически равно нулю, в результате чего пользователь 100 достигает нейтрального положения таза в сидячем положении.
Кроме того, элемент 10 спинки устройства 1 для позиционирования тела пользователя 100 имеет дополнительные камеры 116, 121 и 119 в области грудного отдела позвоночника и датчик 125 в области перехода между лордозом и кифозом. Упомянутые камеры предназначены для позиционирования пользователя 100 сагиттально и вокруг его продольной оси после достижения нейтрального положения таза, путем регулировочных движений, в частности, путем их поочередного и/или синхронного накачивания, в частности, в области позвоночника 106, при этом камеры 116, 121 и 119 обходят остистые отростки 107 пользователя 100 во время процесса накачивания. Датчик 125 переходной зоны служит для регистрации контрольного положения пользователя 100. Регулировочные движения являются плавными вследствие веса пользователя 100 и выполняются последовательно в модуле 13 тазового и поясничного отделов позвоночника, в модуле 12 грудного отдела позвоночника и модуле 11 шейного отдела позвоночника и головы. Кроме того, устройство 1 имеет ножной элемент 30, при этом ножной элемент 30 соединен с элементом 20 сиденьем, предпочтительно механически, с помощью каналов, заполненных текучей средой, и содержит дополнительные камеры и датчики давления, которые не показаны на фигурах. Камеры используются для опоры нижних конечностей, при этом нейтральное положение таза и позвоночника и распределение давления в камерах поддерживается при наклонном положении элемента спины. Перераспределение текучей среды может происходить в дополнение к собственному весу пользователя 100 в результате его собственных движений. Регулировочные движения в элементе 20 сиденье и/или элементе 10 спинки могут, таким образом, выполняться без механического соединения сиденья 20 и элемента 10 спинки через соединенные камеры в соответствующем элементе. Пользователь 100 активирует любые регулировочные элементы ножного элемента 30, чтобы изменить положение верхней части бедра 105 или для поддержки пяток. Пользователь 100 осуществляет перераспределение текучей среды за счет собственного веса, до тех пор пока не будет достигнуто отсутствие значительных перепадов давления на сидение и/или накладку в области таза, или при использовании при наклонном положении пользователя и его вытянутых ног, до тех пор, пока за счет установленного распределения давления пятки пользователя не будут помещены по меньшей мере, на уровне седалищных бугров.
Согласно способу по изобретению давления на сидение на седалищные бугры 102 пользователя 100 регистрируется первым и вторым датчиками 112 давления и оценивается вычислительным блоком 40. Вычислительный блок 40, предпочтительно процессор, активирует камеры 108, в частности клапаны, содержащиеся в соединительных каналах, элемента 20 сидения в случае различий давлений на сидение и выравнивает по горизонтали уровень седалищного бугра пользователя 100 путем выпуска текучей среды из камеры 108 элемента 20 сиденья, в которой создается повышенное внутреннее давление. Вслед за этим давление на сидение копчика пользователя 100 регистрируется третьим датчиком 111 и оценивается вычислительным блоком 40. Независимо от зарегистрированного значения давления на сидение и/или накладку копчика, избыточная текучая среда, выпущенная на предыдущем этапе процесса, и, при необходимости, дополнительная текучая среда из камер устройства с более высоким внутренним давлением в области элемента сидения, за счет веса пользователя накачивается в камеры 117 модуля тазового и поясничного отделов позвоночника, при этом камеры 117 наклоняют таз 101 пользователя 100 попеременно с двух сторон или поочередно относительно его горизонтальной оси, до тех пор, пока давление на сидение копчика в переходной зоне между режимом отсутствия нагрузки и восприятием нагрузки имеет по существу нулевое значение. При необходимости для этого этапа способа необходимо слить излишки текучей среды, чтобы наклонить резервуар назад и достичь этой нейтральной области. Затем, чтобы расположить таз в третьей плоскости тела, давление гребня 103 подвздошной кости и крестца 123 регистрируется датчиками 114 и 113 и оценивается вычислительным блоком 40. Вычислительный блок активирует камеры 108 в случае различий давления накладки, в частности размещенные в соединительных каналах клапаны элемента 20 сиденья и модуля 13 тазового и поясничного отделов позвоночника, и компенсирует давление накладки пользователя 100 за счет вращения таза относительно продольной оси, при этом избыточная текучая среда из камер с более высоким внутренним давлением под весом пользователя 100 закачивается в камеры 110 до тех пор, пока распределение давления накладки не уравновесится.
Согласно способу по изобретению вслед за компенсацией уровня седалищного бугра, процессом наклона и поворота таза 101 в области модуля 13 тазового и поясничного отделов позвоночника следует позиционирование области спины, в частности грудного и шейного отделов позвоночника, пользователя 100 посредством чередующихся и/или синхронных регулировочных движений, в частности, за счет плавной откачки дополнительных камер 110, 116, 121, 119 и 122 элемента 10 спинки, сагиттально и относительно его продольной оси. При этом регулировочные движения в модуле 13 тазового и поясничного отделов позвоночника, в модуле 12 грудного отдела позвоночника и в модуле 11 шейного отдела позвоночника и головы выполняются последовательно, при этом область вокруг остистых отростков 107 пользователя 100 во время каждого процесс регулировки не затрагивается, чтобы не оказывать никакого давления на остистые отростки 107. При таком подходе при уже позиционированных регулировочных элементах элемента сидения и/или элемента спинки по существу не возникают различия давлений на сидение и/или накладку или изменения положения тела.
Согласно способу позиционирования тела, после первичного позиционирования тела пользователя 100 циклически, предпочтительно во временном интервале секунд, минут или часов снова выполняют позиционирование тела. Новое позиционирование тела также может быть вызвано отклонением различия давления на сидение седалищных бугров или отклонением давления на сидение копчика от заданной области перепада давления на сидение или возникает, в частности, в области сегментальных изменений давления на сидение функционально связанных регулировочных элементов.
Согласно способу позиционирования тела, позиционирование тела пользователя 100 осуществляется при наклонном положении элемента 10 спинки.
Согласно способу позиционирования тела, регулировочные элементы, не показанные на фигурах, активируются вычислительным блоком 40 в одной положении на ножном элементе 30, при наклонном положении элемента 10 спинки и наклонном положении элемента 20 сиденья, до тех пор, пока пятка пользователя 100 лежит выше уровня седалищного бугра.
Выше был объяснен вариант осуществления изобретения, который осуществляется по существу без активных регулировочных элементов, поскольку повышенное давление в камерах, которые больше нагружены весом тела, контролируемое вычислительным блоком 40, используется для накачивания других камер. Выпуская воздух из устройства 1, можно также изменить положение сидя, под управлением вычислительным блоком 40. Когда пользователь 100 встает с сиденья, самонадувающиеся камеры из-за стабильности размеров могут быть повторно заполнены до исходного состояния.
Согласно альтернативным вариантам осуществления, регулировочные элементы могут содержать исполнительные механизмы и датчики, выбранные из группы механических, электрических, пневматических или гидравлических активных исполнительных механизмов и датчиков. Таким образом, настоящее изобретение не ограничивается системами камер, заполненных текучей средой. Например, пользователь 100 может быть позиционирован с помощью линейных приводов 108, 117, 110, 116, 119, 121 и 122 с электрическим приводом, активируемых вычислительным блоком 40, при этом вместо датчиков 111, 112, 113, 114, 115, 124 и 125 давления, например, используются пьезоэлементы для регистрации осанки пользователя 100. Это устройство 1 с электрическим приводом позволяет позиционировать корпус без контуров управления, определяемых каналами и клапанами. Другая возможность для позиционирования тела пользователя 100 может быть реализована с помощью гидравлических регулировочных элементов 108, 117, 110, 116, 119, 121 и 122, таких как гидроцилиндр в сочетании с датчиками 111, 112, 113, 114, 115, 124 и 125 давления проходящего потока. Другая возможность для позиционирования тела пользователя 100 может заключаться в сочетании различных регулировочных элементов. Например, элемент 10 спинки может иметь механические, в частности, заполненные текучей средой камеры 110, 116, 117, 119, 121 и 122, а элемент сиденья может содержать электрические регулировочные элементы 108, такие как линейные приводы. Любая дополнительная комбинация регулировочных элементов включена в настоящее изобретение.
Согласно альтернативным вариантам осуществления все механические соединения устройства 1 также могут быть электрическими, проводными или беспроводными, например, посредством Bluetooth или WLAN, и не ограничиваются приведенным выше примером.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СИДЕНИЯ | 2002 |
|
RU2199258C1 |
| Способ разгрузки позвоночного столба и устройство для его осуществления | 2016 |
|
RU2661585C2 |
| СПОСОБ РАЗГРУЗКИ ПОЗВОНОЧНОГО СТОЛБА | 2002 |
|
RU2206295C1 |
| Способ изготовления персонифицированного ортопедического кресла и персонифицированное ортопедическое кресло | 2024 |
|
RU2835346C1 |
| СПОСОБ ЛЕЧЕНИЯ КОКЦИГОДИНИИ | 1998 |
|
RU2127575C1 |
| СПОСОБ ЛЕЧЕНИЯ ГРЫЖ МЕЖПОЗВОНКОВЫХ ДИСКОВ | 2000 |
|
RU2162312C1 |
| ОЗДОРАВЛИВАЮЩЕЕ КРЕСЛО (ВАРИАНТЫ) | 2011 |
|
RU2481054C1 |
| СПОСОБ ПРОФИЛАКТИКИ И ЛЕЧЕНИЯ ДЕФОРМАЦИЙ ПОЗВОНОЧНИКА И ОРТОПЕДИЧЕСКИЙ КОМПЛЕКТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2329014C2 |
| Роботизированное кресло-тренажер | 2024 |
|
RU2837297C1 |
| КРЕСЛО-СИДЕНЬЕ ДЛЯ РЕАБИЛИТАЦИИ БОЛЬНОГО ЦЕРЕБРАЛЬНЫМ ПАРАЛИЧОМ | 2004 |
|
RU2262914C1 |
Изобретение относится к устройству для позиционирования тела пользователя и способу управления данным устройством. Техническим результатом является улучшение положения тела в сидячем положении. Устройство содержит элемент сиденья. Также содержит элемент спинки, имеющий модуль тазового и поясничного отделов позвоночника, и вычислительный блок. Элемент спинки соединен с элементом сиденья. Модуль тазового и поясничного отделов позвоночника содержит по меньшей мере один регулировочный элемент и по меньшей мере один датчик. Элемент сиденья содержит по меньшей мере один регулировочный элемент и по меньшей мере три датчика. Датчики соединены с вычислительным блоком и выполнены для регистрации давлений на сиденье и накладку пользователя в элементе сиденья и в модуле тазового и поясничного отделов позвоночника. Вычислительный блок соединен с регулировочными элементами и выполнен для оценки давлений на сиденье и накладку и для активации регулировочных элементов. Первый и второй датчики и третий датчик выполнены для регистрации давления на сиденье первого и второго седалищного бугра и давления на сиденье копчика в вертикальном сидячем положении пользователя. Первый и второй седалищные бугры определяют уровень седалищного бугра. Регулировочный элемент элемента сиденья выполнен для выравнивания уровня седалищного бугра по горизонтали относительно сагиттальной оси пользователя в случае различий давления на сиденье и/или накладку, и затем регулировочный элемент модуля тазового и поясничного отделов позвоночника выполнен для перемещения таза пользователя для наклона относительно его горизонтальной оси до тех пор, пока давление на сиденье и/или накладку копчика не примет равное нулю значение. 2 н. и 11 з.п. ф-лы, 2 ил.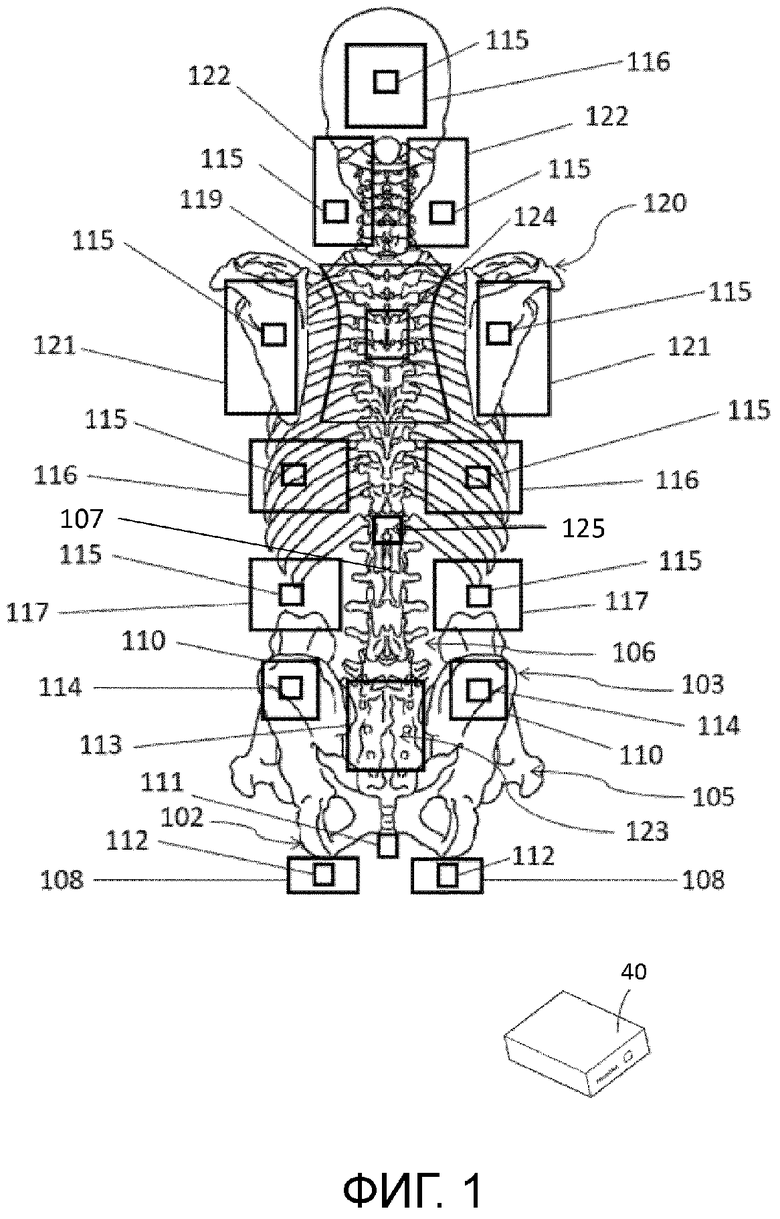
1. Устройство (1) для позиционирования тела пользователя (100), при этом устройство может быть интегрировано в сиденье или кушетку или может использоваться в качестве накладки, содержащее:
элемент (20) сиденья, элемент (10)спинки, имеющий модуль (13) тазового и поясничного отделов позвоночника, и вычислительный блок (40), причем элемент (10) спинки соединен с элементом (20) сиденья, причем модуль (13) тазового и поясничного отделов позвоночника содержит по меньшей мере один регулировочный элемент (117) и по меньшей мере один датчик (113), и элемент (20) сиденья содержит по меньшей мере один регулировочный элемент (108) и по меньшей мере три датчика (111, 112, 113), причем датчики (111, 112, 113) соединены с вычислительным блоком (40) и выполнены для регистрации давлений на сиденье и накладку пользователя (100) в элементе (20) сиденья и в модуле (13) тазового и поясничного отделов позвоночника, при этом вычислительный блок (40) соединен с регулировочными элементами (108, 117) и выполнен для оценки давлений на сиденье и накладку и для активации регулировочных элементов (108, 117), отличающееся тем, что первый и второй датчики (112) и третий датчик (111) выполнены для регистрации давления на сиденье первого и второго седалищных бугров (102) и давления на сиденье копчика (104) в вертикальном сидячем положении пользователя (100), при этом первый и второй седалищные бугры (102) определяют уровень седалищного бугра, при этом регулировочный элемент (108) элемента (20) сиденья выполнен для выравнивания уровня седалищного бугра по горизонтали относительно сагиттальной оси пользователя (100) в случае различий давления на сиденье и/или накладку, и затем регулировочный элемент (117) модуля (13) тазового и поясничного отделов позвоночника выполнен для перемещения таза (101) пользователя (100) для наклона относительно его горизонтальной оси до тех пор, пока давление на сиденье и/или накладку копчика (104) не примет равное нулю значение.
2. Устройство (1) по п.1, отличающееся тем, что в области крестца (123) и копчика (104) пользователя (100), когда пользователь (100) переводится из вертикального сидячего положения в наклоненное относительно горизонтальной оси пользователя (100) положение, давления на сиденье и/или накладку действуют в зависимости от наклона этого положения, при этом максимальные давления на сиденье и/или накладку возникают в лежачем положении тела в области крестца (123).
3. Устройство (1) по п.1, отличающееся тем, что элемент (10) спинки имеет модуль (12) грудного отдела позвоночника и модуль (11) шейного отдела позвоночника и головы, при этом модуль (12) грудного отдела позвоночника и модуль (11) шейного отдела позвоночника и головы соединены друг с другом, и/или по отдельности с модулем (13) тазового и поясничного отделов позвоночника, и/или по отдельности с элементом (20) сиденья.
4. Устройство (1) по любому из предшествующих пунктов, отличающееся тем, что элемент (10) спинки содержит дополнительные регулировочные элементы (116, 121, 119, 122, 110), которые выполнены для осуществления чередующихся и/или синхронных регулировочных движений, в частности, в области позвоночника (106), чтобы позиционировать пользователя (100) сагиттально и вокруг его продольной оси, при этом вычислительный блок (40) выполнен для осуществления регулировочных движений в модуле (13) тазового и поясничного отделов позвоночника, в модуле (12) грудного отдела позвоночника и модуле (11) шейного отдела позвоночника и головы последовательно друг за другом, при этом в уже установленных регулировочных элементах элемента сиденья и/или спинки не возникают различия давления на сиденье и/или накладку или соответственно изменения положения тела.
5. Устройство (1) по п.4, отличающееся тем, что регулировочные элементы (117, 116, 119, 121, 122) при активации обходят остистые отростки (107) пользователя (100).
6. Устройство (1) по любому из предшествующих пунктов, отличающееся тем, что устройство (1) имеет ножной элемент (30), при этом ножной элемент (30) соединен с элементом (20) сиденья и содержит дополнительные регулировочные элементы и датчики.
7. Устройство (1) по любому из предшествующих пунктов, отличающееся тем, что регулировочные элементы (108, 117, 110, 116, 121, 119, 122) содержат исполнительные механизмы, выбранные из группы механических, электрических, пневматических или гидравлических исполнительных механизмов.
8. Устройство (1) по любому из предшествующих пунктов, отличающееся тем, что датчики (111, 112, 113, 114, 115, 124, 125) выбраны из группы механических, электрических, пневматических или гидравлических датчиков.
9. Способ управления устройством (1) по пп.1-8, включающий следующие этапы:
a) регистрации давления на сиденье и/или накладку седалищных бугров (102) пользователя (100) первым и вторым датчиками (112);
b) оценки давлений на сиденье и/или накладку и, в случае различий давления на сиденье и/или накладку, активацию регулировочного элемента (108) элемента (20) сиденья вычислительным блоком (40);
c) горизонтального выравнивания уровня седалищного бугра пользователя (100) относительно его сагиттальной оси;
d) регистрации давления на сиденье копчика (104) пользователя (100) третьим датчиком (111) элемента (20) сиденья;
e) оценку давления на сиденье и/или накладку копчика (104) пользователя вычислительным блоком (40);
f) активацию регулировочного элемента (117) модуля (13) тазового и поясничного отделов позвоночника вычислительным блоком (40) для наклона таза (101) пользователя (100) вокруг его горизонтальной оси в положительном и/или отрицательном сагиттальном направлении;
g) завершения регулировочного движения регулировочных элементов (117) вычислительным блоком (40), как только давление на сиденье и/или накладку копчика (104) примет равное нулю значение во время наклона.
10. Способ по п.9, отличающийся тем, что способ после выравнивания уровня седалищного бугра и процесса наклона таза (101) пользователя (100) содержит следующие этапы:
a) позиционирования и сагиттальной поддержки пользователя (100) в области грудного отдела позвоночника путем активации регулировочных элементов (119, 121) модуля (12) грудного отдела позвоночника вычислительным блоком (40), при этом регулировочные движения обходят область остистых отростков (107);
b) обнаружения различия давления на сиденье и накладку датчиками (111, 112, 114, 113) элемента (20) сиденья и элемента (10) спинки;
c) оценки давлений на сиденье и накладку вычислительным блоком (40);
d) окончания регулировочного движения регулировочного элемента (119) модуля (12) грудного отдела позвоночника вычислительным блоком (40), как только обнаруживается значительное различие давления на сиденье и/или накладку в регулировочных элементах элемента (20) сиденья и/или модуля (13) тазового и поясничного отделов позвоночника;
e) последующего позиционирования и сагиттальной поддержки пользователя (100) в его шейном отделе позвоночника и в области головы посредством активации регулировочных элементов (122) модуля (11) шейного отдела позвоночника и головы вычислительным блоком (40);
f) завершения регулировочного движения регулировочных элементов (122, 115) вычислительным блоком (40), как только регистрируется различие давления на сиденье и/или накладку в регулировочных элементах (116, 121) модуля (12) грудного отдела позвоночника.
11. Способ по п.9 и 10, отличающийся тем, что позиционирование тела пользователя (100) происходит в наклонном положении элемента (10) спинки.
12. Способ по п.9 и 11, отличающийся тем, что регулировочные элементы активируют посредством вычислительного блока (40) в одном положении ножного элемента (30) при наклонном положении элемента (10) спинки и наклонном положении элемента (20) сиденья до тех пор, пока пятка пользователя (100) не окажется по меньшей мере на уровне седалищного бугра.
13. Способ по любому из пп. 8-12, в котором способ после позиционирования пользователя (100) включает следующие этапы:
a) дополнительного позиционирования пользователя (100) через циклические интервалы времени и/или в случае сегментного отличия давления от заранее заданных диапазонов давления на сиденье и накладку;
b) активации регулировочных элементов устройства (1) в горизонтальной плоскости элемента (10) спинки, и/или элемента (20) сиденья, и/или ножного элемента (30) в виде синхронных и/или чередующихся регулировочных движений сегментно вверх и/или вниз последовательно или в любом порядке вдоль продольной оси, при этом синхронные регулировочные движения происходят как в положительном, так и в отрицательном сагиттальном направлении, и чередующиеся регулировочные движения происходят в форме вращения вокруг продольной оси, при этом регулировочные движения с одной стороны осуществляют в положительном сагиттальном направлении и с другой стороны в равном значении в отрицательном сагиттальном направлении;
c) активации регулировочных элементов элемента (20) сиденья в виде синхронных или чередующихся регулировочных движений;
d) активации регулировочных элементов ножного элемента (30) в виде синхронных и/или чередующихся регулировочных движений.
| DE 202016102473 U1, 10.08.2017 | |||
| ОЗДОРАВЛИВАЮЩЕЕ КРЕСЛО (ВАРИАНТЫ) | 2011 |
|
RU2481054C1 |
| Кресло со спинкой, состоящей из подвижных механических сегментов, поддерживающих спину, шею и голову пользователя | 2015 |
|
RU2610417C2 |
| 0 |
|
SU160600A1 | |
| СПОСОБ И ОБОРУДОВАНИЕ ДЛЯ РЕГУЛИРОВКИ ДАВЛЕНИЯ В МАТРАСЕ | 2012 |
|
RU2581631C1 |
| US 2017086588 A1, 30.03.2017. | |||

