Изобретение относится к оптической локации - системам, обеспечивающим обнаружение объекта в пространстве, окружающем место установки лазерной локационной системы, получение информации о форме его поверхности, при необходимости - ее визуализации и распознавание объекта.
Известна локационная система (патент RU 2612874 [1]), предназначенная для сканирования окружающего пространства, обнаружения объектов и определения их положения в пространстве. Его недостатком является использование одной и той же оптической системы для формирования пучка зондирующего лазерного излучения и формирования поля зрения приемника излучения, что неизбежно приводит к частичной засветке приемника зондирующим излучением, вследствие которой чувствительность приемника в течение некоторого интервала времени уменьшается и на соответствующих этому времени дистанциях ухудшаются характеристики обнаружения объекта. Наиболее близким к заявленному техническому решению является локационная система (патент RU 2660390 [2]), содержащая импульсный лазер, выходную оптическую систему передающего канала, фотоприемное устройство, однокоординатное сканирующее устройство, оптический объектив фотоприемного устройства, массив фотоприемников, волоконно-оптический жгут и вычислительное устройство, соединенное с ними через волоконно-оптический жгут).
Недостатком данного технического решения является ограниченное разрешение по дальности, что не позволяет определять характерные черты поверхности объекта - известно, что огибающая регистрируемого импульса излучения связана с его формой лоцируемого объекта и его ориентацией в пространстве, поэтому ее анализ позволяет осуществлять распознавание лоцируемого объекта [3].
Задачами, на решение которых направлено заявляемое изобретение, являются: уменьшение размеров области пространства, в которой ухудшаются характеристики обнаружения объекта; реконструкция поверхности обнаруженного объекта; обеспечение обнаружения объекта в трехмерном (3D) пространстве вокруг лазерной локационной системы.
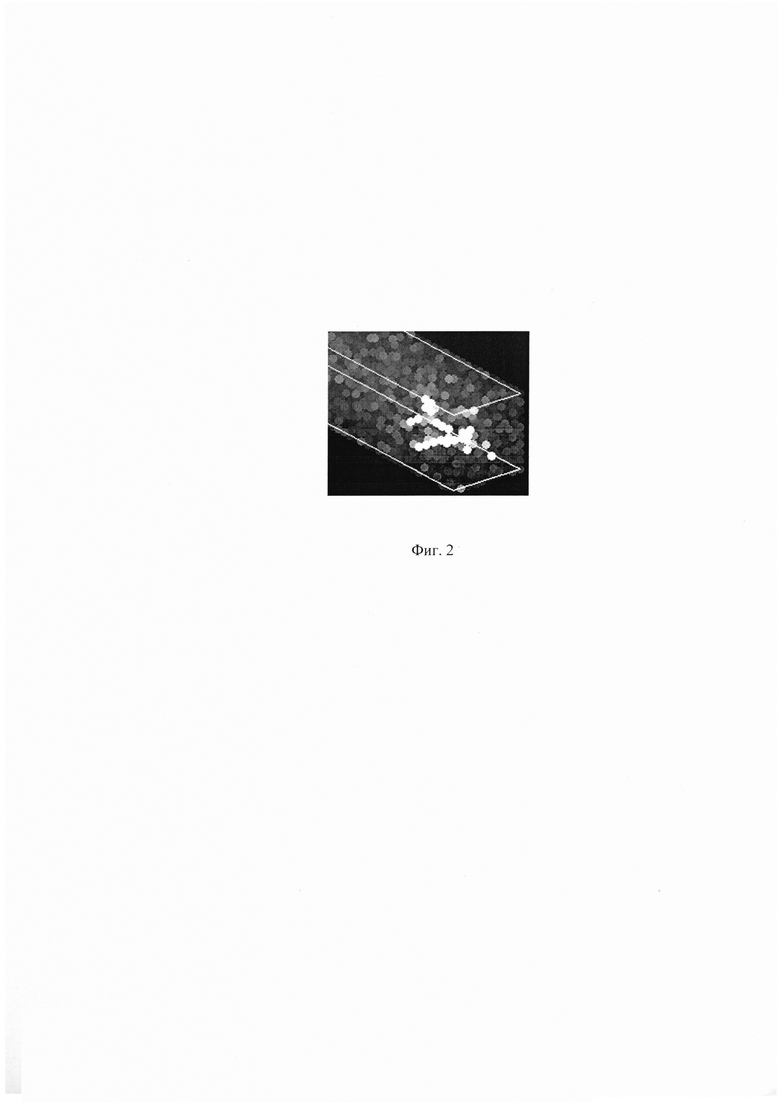
Введение в состав системы (фиг. 1) узлов регистрации отсчетов огибающих регистрируемых импульсов - дальностных портретов с высоким пространственным разрешением - позволяет синтезировать 3D-oбpaз лоцируемого объема [3], и если в его пределах находится объект - реконструировать его поверхность. Результат такой реконструкции представлен на фиг. 2. Введение в состав локационной системы оптических элементов, изменяющих величины фокусов оптических систем передающего и приемного каналов, позволяет изменять ее пространственное разрешение, что обеспечивает возможность реконструкции с высоким разрешением поверхности лоцируемого объекта, находящегося на произвольном расстоянии от локационной системы. При этом расстояние до объекта определяется вычислительным устройством, которое в соответствии с ним обеспечивает изменение фокусных расстояний оптических систем приемного и передающего канала, одновременно обеспечивая сопряжение размеров сечения лазерного пучка передающего канала и совокупности полей зрения, регистрирующих рассеянное объектом излучение фотодетекторов.
Введение системы плоских зеркал, изменяющих положение лазерного пучка и полей зрения излучение фотодетекторов, регистрирующих рассеянное объектом излучение, позволяет сканировать пространство и регистрировать дальностные портреты с высоким пространственным разрешением в вертикальной плоскости, а за счет синхронизированных поворотов всей лазерной локационной системы - обеспечить сканирование части всего окружающего пространства или его выбранной области.
Достигаемый технический результат заключается в обеспечении высокого временного разрешения синхронизированных отсчетов огибающих регистрируемых импульсов излучения в каждом канале фотоприемного устройства.
Дальность действия лазерной локационной системы может быть увеличена за счет применения в составе передающего канала усилителя лазерного излучения на основе активных лазерных зеркал [4].
Совокупность существенных признаков, характеризующих сущность заявляемого изобретения, не известна из уровня техники, что позволяет сделать вывод о соответствии изобретения критерию "Новизна".
Сущность заявляемого изобретения не следует для специалиста явным образом из известного уровня техники, т.к. из него не выявляется вышеуказанное влияние на получаемый технический результат - новое свойство объекта - совокупности признаков, которые отличают от прототипа заявляемое изобретение, что позволяет сделать вывод о его соответствии критерию "Изобретательский уровень".
Совокупность существенных признаков, характеризующих сущность изобретения, в принципе, может быть многократно использована для реализации лазерной локационной системы с получением технического результата, заключающегося в обеспечении уменьшения размеров области пространства, в которой ухудшаются характеристики обнаружения объекта; реконструкции поверхности обнаруженного объекта; и обнаружении объекта в пространстве вокруг лазерной локационной системы, обусловливающего достижение поставленной задачи, что позволяет сделать вывод о соответствии изобретения критерию "Промышленная применимость".
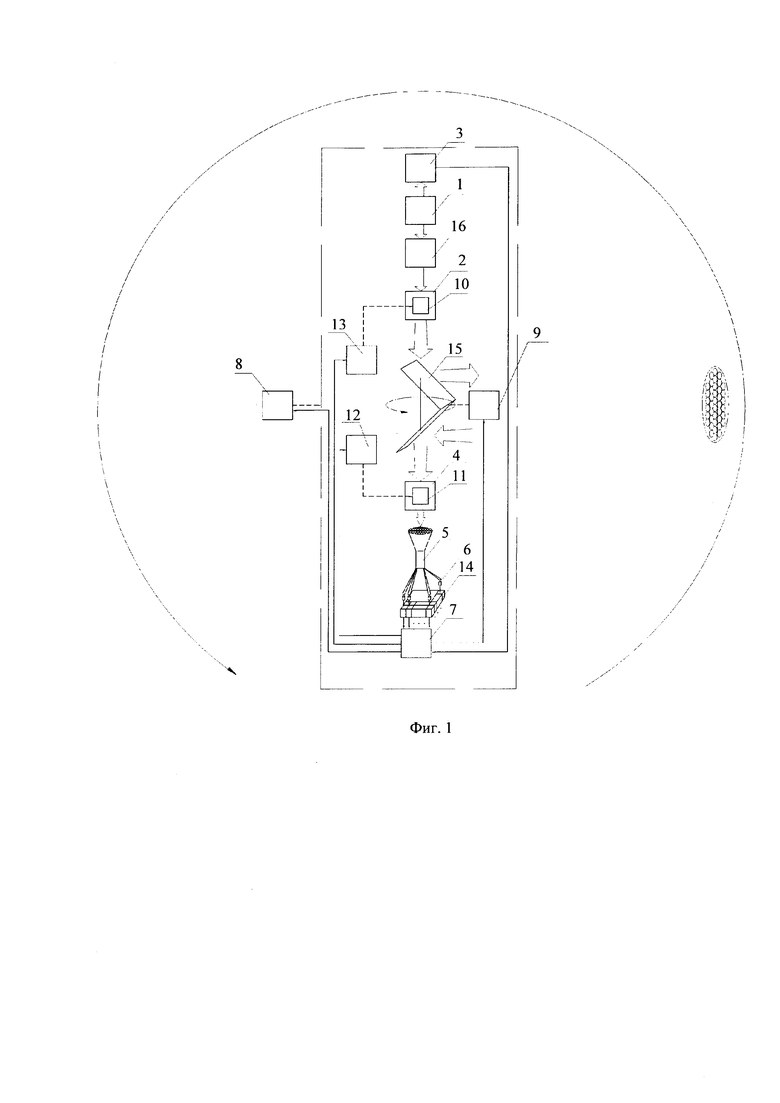
На фиг. 1 представлена функциональная схема лазерной локационной системы:
1 - импульсный лазер;
2 - оптическая система передающего канала;
3 - фотоприемное устройство регистрации импульса излучения лазера;
4 - оптическая система приемного канала;
5 - оптоволоконный жгут;
6 - массив фотодетекторов;
7 - вычислительное устройство;
8 - привод перемещения передающего и приемного каналов в горизонтальной плоскости;
9 - привод сканирующей системы, функционирующей в вертикальной плоскости;
10 - оптические элементы, обеспечивающие изменение фокусного расстояния оптической системы передающего канала;
11 - оптические элементы, обеспечивающие изменение фокусного расстояния оптической системы приемного канала;
12 - привод фокусирующих элементов оптической системы передающего канала;
13 - привод фокусирующих элементов оптической системы приемного канала;
14 - массив фотоприемных устройств с аналого-цифровыми преобразователями;
15 - сканирующая система, функционирующая в вертикальной плоскости;
16 - многопроходный усилитель лазерного излучения с зеркальной активной оптической системой.
Сечение зондирующего лазерного пучка обозначено штрихпунктирной линией, а поля зрения фотодиодов - непрерывными линиями.
На фиг. 2 изображен результат реконструкции поверхности обнаруженного объекта.
Излучение импульсного лазера (1) поступает на вход оптической системы передающего канала (2), подвижные элементы (10) которой, перемещаемые приводом (12), обеспечивают изменение ее фокусного расстояния и тем самым обеспечивают изменение размеров сечения лазерного пучка в окрестности, где может находиться объект. Направление распространения импульсов лазерного излучения и положение в пространстве поля зрения оптической системы приемного канала (4) задается положением плоских зеркал (15) - исполнительного элемента сканирующей системы, функционирующей в вертикальной плоскости. Оптические элементы, обеспечивающие изменение фокусного расстояния оптической системы приемного канала (11), перемещаются приводом (13). Положение этого привода, определяющее величину фокуса оптической системы приемного канала (4), как и согласованное с ним по величине фокуса оптической системы передающего канала (2) положение привода (12), задаются вычислительным устройством (7). На его входы поступают сигналы с выходов массива фотоприемных устройств с аналого-цифровыми преобразователями (14), вход каждого из которых подключен к соответствующему выходу массива фотодетекторов (6). На каждый фотодетектор этого массива поступает часть излучения, пространственное распределение которого в фокальной плоскости оптической системы приемного канала (11) образует изображение лоцируемой части пространства, а если в нем находится объект - его изображение. Для передачи излучения от каждого участка изображения к соответствующему фотодетектору используется оптоволоконный жгут (5). Вычислительное устройство выполняет анализ совокупности зарегистрированных сигналов, по результатам которого принимает решение об обнаружении или не обнаружении объекта, и в случае, если объект обнаружен, определяет расстояние до него, в соответствии с полученной величиной расстояния (или по командам оператора) корректирует положение приводов (12) и (13), а также выполняет 3D-реконструкцию лоцируемой части пространства и/или распознавание обнаруженного в этой части объекта. Информационные данные могут передаваться оператору, например, по встроенному в вычислительное устройство радиоканалу. Этот же канал связи может использоваться для передачи в вычислительное устройство команд оператора. Привод перемещения передающего и приемного каналов в горизонтальной плоскости (8) обеспечивает вращение несущей платформы локационной системы относительно носителя. Фотоприемное устройство регистрации импульса излучения лазера (3), связанное с вычислительным устройством (7), обеспечивает синхронизацию момента времени излучения импульса лазера и момента начала регистрации отсчетов рассеянного импульса. Вычислительное устройство (7) также обеспечивает синхронизацию работы приводов (8) и (9) для обеспечения сканирования в пространстве лазерной локационной системы. Применение в составе лазерной локационной системы многопроходного усилителя лазерного излучения с зеркальной активной оптической системой (16), включаемого в оптическую схему между импульсным лазером (1) и входом оптической системы передающего канала (2) позволит увеличить ее дальность действия, не увеличивая существенно расходимость излучения лазерного пучка.
В отношении длительности импульса лазерного излучения установлено [5, 6], что уверенное распознавание объекта оказывается возможным, если эта величина не превышает 10% интервала времени распространения импульса излучения вдоль поверхности объекта в направлении, в котором это время минимально.
Лист литературы:
1. Патент РФ № 2612874. Система импульсной лазерной локации. Выдан 12.11.2015. Опубл. 13.03.2017, бюл. №8.
2. Патент РФ №2660390. Система импульсной лазерной локации. Выдан 15.06.2017. Опубл. 06.07.2018, бюл. №19.
3. Бурый Е.В. Синтез системы распознавания объектов по форме огибающей лазерного импульса при импульсно-периодической локации // Квантовая электроника, 1988. - Т. 25, №5. С. 471-475.
4. Патент РФ № 2583105. Многопроходный усилитель лазерного излучения с зеркальной активной оптической системой. Выдан 17.02.2014. Опубл. 10.05.2016, бюл. №13.
5. Баулин Ф.Б., Бурый Е.В. Методы формирования векторов признаков для распознавания объектов по дальностным портретам в импульсной лазерной локации // Компьютерная оптика, 2021. - Т. 45, №6. - С. 934 - 941.
6. Бурый Е.В. Импульсная лазерная локация: физические и информационные основы новых возможностей. М.: Наука, 2020. - 431 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система импульсной лазерной локации | 2017 |
|
RU2660390C1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |
| Система импульсной лазерной локации | 2015 |
|
RU2612874C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ В ЛАЗЕРНОМ КОГЕРЕНТНОМ ЛОКАТОРЕ С МАТРИЧНЫМ ФОТОПРИЕМНИКОМ | 2007 |
|
RU2354994C1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2528109C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| ЛАЗЕРНАЯ ЛОКАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2544305C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2372628C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2013 |
|
RU2540154C2 |
| КОМПЛЕКС ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2529758C1 |
Использование: изобретение относится к оптической локации - системам, обеспечивающим обнаружение объекта в пространстве, окружающем место установки лазерной локационной системы, получение информации о форме его поверхности, при необходимости - ее визуализации, и распознавание объекта. Сущность: в лазерной локационной системе реализована схема многоканальной регистрации огибающих сигналов, формируемых при рассеянии зондирующего лазерного импульса различными участками поверхности объекта, который может находиться в какой-либо лоцируемой области пространства вокруг лазерной локационной системы. Синхронная регистрация отсчетов, огибающих множества сигналов, одновременно регистрируемых массивом фотодетекторов, позволяет реконструировать облученную часть поверхности объекта и проводить его распознавание. Управляемое согласованное изменение величин фокусов оптических систем передающего и приемного каналов локационной системы позволяет изменять ее пространственное разрешение, что обеспечивает возможность выполнения реконструкции с высоким разрешением поверхности лоцируемого объекта, находящегося на произвольном расстоянии от нее. 2 з.п. ф-лы, 2 ил.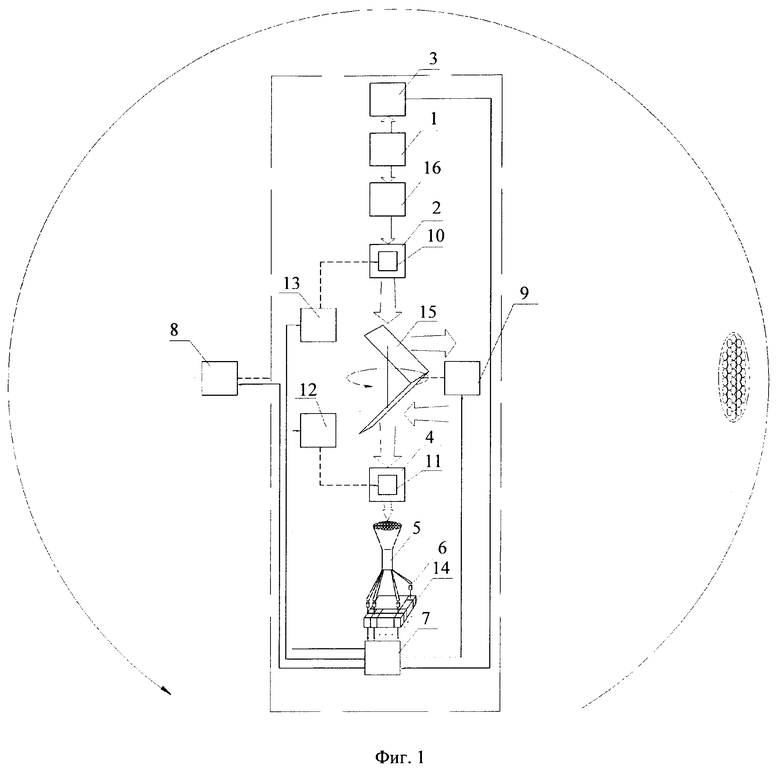
1. Лазерная локационная система, содержащая: импульсный лазер; оптическую систему передающего канала; формирователь синхросигнала передающего канала; оптическую систему приемного канала; матрицу фотоприемников; вычислительное устройство; сканирующее устройство позиционирования полей оптических систем в вертикальной плоскости, а также волоконно-оптический жгут, волокна которого с одной стороны обращены торцами к соответствующим фотоприемникам матрицы фотоприемников, а с другой стороны торцы волокон жгута обращены к выходу оптической системы приемного канала и расположены в его фокальной плоскости, причем оптически связанный с лазером формирователь синхросигнала передающего канала подключен ко входу синхронизации вычислительного устройства, отличающаяся тем, что в состав системы дополнительно введены: устройство позиционирования элементов передающего и приемного каналов в горизонтальной плоскости, оптические элементы, изменяющие величины фокусов оптических систем передающего и приемного каналов, обеспечивающие их перемещение электромеханические приводы и быстродействующие аналого-цифровые преобразователи (АЦП), причем выход каждого фотоприемника матрицы фотоприемников соединен со входом соответствующего АЦП, выходы этих АЦП соединены с входами вычислительного устройства, выходы которого соединены с электромеханическими приводами и позиционирования оптических систем.
2. Лазерная локационная система по п. 1, отличающаяся тем, что сканирование пространства осуществляется за счет синхронного изменения пространственного положения пучка лазерных лучей и полей зрения фотоприемников, осуществляемого в вертикальной плоскости путем вращения плоских зеркал соответствующим приводом, а в горизонтальной плоскости - за счет вращения всей лазерной локационной системы другим приводом, причем каждый из приводов соединен с вычислительным устройством.
3. Лазерная локационная система по пп. 1 и 2, отличающаяся тем, что на выходе импульсного лазера включен усилитель лазерного излучения на основе активных оптических зеркал, обеспечивающий формирование пучка лазерных лучей большой интенсивности с малой расходимостью.
| Жировально-чистильная машина для обработки кож | 1929 |
|
SU22845A1 |
| Система импульсной лазерной локации | 2017 |
|
RU2660390C1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2528109C1 |
| Импульсный лазерный дальномер | 2021 |
|
RU2756783C1 |
| US 10557940 B2, 11.02.2020. | |||

