Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству перемещения заготовки, способу управления устройством перемещения заготовки и линии прессования.
Испрашивается приоритет по заявке на патент Японии №2005-165775, поданной 6 июня 2005 г., содержание которой включено здесь посредством ссылки.
Уровень техники
В качестве способа управления прессом и устройством перемещения заготовки в тандемно расположенной линии прессования, способ управления углом сдвига фаз является широко известным. В этом способе управления углом сдвига фаз, положение матрицы (пресс-формы), то есть угол пресса на стороне выше по потоку тандемно расположенной линии прессования и угол пресса на стороне ниже по потоку тандемно расположенной линии прессования, регулируются таким образом, чтобы иметь заданный угол сдвига фаз для предотвращения столкновений устройства перемещения заготовки с матрицами при перемещении заготовки. Такой способ управления углом сдвига фаз может перемещать заготовку без остановки пресса на стороне выше по потоку и пресса на стороне ниже по потоку, и позволяет единственному устройству перемещения заготовки плавно перемещать заготовку между вышеупомянутыми прессами без столкновений с матрицами. Поэтому он имеет преимущества, заключающиеся в том, что производительность является высокой, а затраты на устройство низкими.
Например, в нерассмотренной заявке на патент Японии, публикация №2004-195485, раскрыта технология, которая относится к способу управления, использующему способ управления углом сдвига фаз, как описано выше. Эта технология управляет устройством перемещения заготовки синхронно с углом пресса на стороне выше по потоку в зоне мешающего воздействия матрицы, когда заготовку перемещают из пресса на стороне выше по потоку, и управляет устройством перемещения заготовки синхронно с углом пресса на стороне ниже по потоку в зоне мешающего воздействия матрицы, когда заготовку перемещают в пресс на стороне ниже по потоку. Кроме того, она управляет устройством перемещения заготовки на основании управляющего сигнала, поступающего от определенного устройства генерирования заданного сигнала в зонах перемещения, отличающихся от вышеупомянутых зон мешающего воздействия матриц. Поскольку предусмотрено такое устройство генерирования сигнала для управления зонами перемещения, устройство перемещения заготовки может использоваться, даже когда пресс на стороне выше по потоку и/или пресс на стороне ниже по потоку остановлен. Поэтому можно улучшить эффективность производства.
Патентный документ 1: нерассмотренная заявка на патент Японии, публикация №2004-195485.
Раскрытие изобретения
Проблемы, решаемые с помощью изобретения
Однако вышеупомянутая общепринятая технология имеет проблему, заключающуюся в том, что возникает внезапное изменение в величине управляющего воздействия, вводимого в устройство перемещения заготовки на границе между зоной мешающего воздействия матрицы и зоной перемещения. Это изменение может приводить к вибрации в устройстве перемещения заготовки и приводит к падению заготовки или отказу в устройстве перемещения заготовки. Для подавления этой вибрации в устройстве перемещения заготовки возможно увеличить механическую жесткость устройства перемещения заготовки. Однако, при увеличении жесткости увеличивается вес подвижных участков, таким образом приводя к проблеме, заключающейся в том, что расходуемая энергия для работы устройства перемещения заготовки увеличивается, а также увеличивается стоимость устройства. Авторы настоящего изобретения полагают, что устройства перемещения заготовки в дальнейшем необходимо выпускать более легкими и с меньшими размерами для уменьшения расходуемой энергии, а также обеспечивать более низкую стоимость устройства, и поэтому предлагают настоящее изобретение.
Настоящее изобретение было достигнуто с учетом вышеупомянутых обстоятельств, и его целью является подавление вибрации в устройстве перемещения заготовки при перемещении заготовки без увеличения механической жесткости устройства перемещения заготовки.
Средства решения проблемы
Для достижения вышеупомянутой цели, настоящее изобретение предлагает, в качестве первого решения относительно устройства перемещения заготовки, устройство перемещения заготовки, выполненное с возможностью захвата заготовки при помощи устройства заданного захвата и перемещения заготовки между прессами, каждый из которых приводит в движение матрицу, содержащее устройство управления перемещением для управления положением устройства захвата, на основании результирующего целевого значения, полученного посредством объединения положения матрицы пресса, расположенного на стороне выше по потоку в направлении перемещения заготовки (положение матрицы на стороне выше по потоку) и положения матрицы пресса, расположенного на стороне ниже по потоку в направлении перемещения заготовки (положение матрицы на стороне ниже по потоку), при этом устройство управления перемещением устанавливает результирующее целевое значение таким образом, чтобы обеспечивалось плавное перемещение устройства захвата.
Настоящее изобретение предлагает, в качестве второго решения относительно устройства перемещения заготовки, устройство перемещения заготовки в соответствии с вышеупомянутым первым решением в случае, в котором положение матрицы на стороне выше по потоку задается в виде угла θu пресса (угол пресса на стороне выше по потоку), а положение матрицы на стороне ниже по потоку задается в виде угла θd пресса (угол пресса на стороне ниже по потоку) соответствующими прессами, при этом устройство управления перемещением устанавливает результирующий целевой угол θr в виде результирующего целевого значения, причем результирующий целевой угол θr получается с помощью подстановки угла θu пресса на стороне выше по потоку и угла θd пресса на стороне ниже по потоку в следующее уравнение (1) синтеза, которое связано с углом Δθp сдвига фаз между двумя углами прессов и весовым коэффициентом W:

Настоящее изобретение предлагает, в качестве третьего решения относительно устройства перемещения заготовки, устройство перемещения заготовки в соответствии с вышеупомянутым первым решением, в случае, в котором положение матрицы на стороне выше по потоку задается в виде угла θu пресса (угол пресса на стороне выше по потоку), а положение матрицы на стороне ниже по потоку задается в виде угла θd пресса (угол пресса на стороне ниже по потоку) соответствующими прессами, при этом устройство управления перемещением приобретает первые координаты (Xu, Yu) устройства захвата на основании угла θu пресса на стороне выше по потоку. И в то же самое время, устройство управления перемещением приобретает вторые координаты (Xd, Yd) устройства захвата на основании угла θd пресса на стороне ниже по потоку, и затем устанавливает результирующие целевые координаты (Xr, Yr) в виде результирующего целевого значения. Здесь, результирующие целевые координаты (Xr, Yr) получают посредством подстановки первых координат (Xu, Yu) и вторых координат (Xd, Yd) в следующие уравнения (4) и (5) синтеза, которые связаны с весовым коэффициентом W:


Настоящее изобретение отличается, в качестве четвертого решения относительно устройства перемещения заготовки, устройством перемещения заготовки в соответствии с вышеупомянутым вторым или третьим решением, в котором весовой коэффициент W представляет величину уменьшающейся и непрерывной функции, которая принимает угол θu пресса на стороне выше по потоку в качестве переменной.
Настоящее изобретение предлагает, в качестве пятого решения относительно устройства перемещения заготовки, устройство перемещения заготовки в соответствии с вышеупомянутым первым решением, в случае, в котором положение матрицы на стороне выше по потоку задается в виде угла θu пресса (угол пресса на стороне выше по потоку), а положение матрицы на стороне ниже по потоку задается в виде угла θd пресса (угол пресса на стороне ниже по потоку) соответствующими прессами, при этом устройство управления перемещением устанавливает результирующее целевое значение. Результирующее целевое значение устанавливается посредством извлечения, на основании угла θu пресса на стороне выше по потоку и угла θd пресса на стороне ниже по потоку, которые задаются соответствующими прессами, из таблицы, в которой результирующие целевые значения устанавливаются заранее, с углом θu пресса на стороне выше по потоку и углом θd пресса на стороне ниже по потоку в качестве переменных.
Настоящее изобретение предлагает, в качестве шестого решения относительно устройства перемещения заготовки, устройство перемещения заготовки в соответствии с вышеупомянутым первым решением, в случае, в котором положение матрицы на стороне выше по потоку задается в виде угла θu пресса (угол пресса на стороне выше по потоку), а положение матрицы на стороне ниже по потоку задается в виде угла θd пресса (угол пресса на стороне ниже по потоку) соответствующими прессами, при этом устройство управления перемещением приобретает первые координаты (Xu, Yu) устройства захвата в виде расчетной величины на основании угла θu пресса на стороне выше по потоку. И в то же самое время, устройство управления перемещением приобретает вторые координаты (Xd, Yd) устройства захвата в виде расчетной величины на основании угла θd пресса на стороне ниже по потоку, и затем устанавливает результирующее целевое значение посредством извлечения, на основании расчетных величин, из таблицы, в которой результирующие целевые значения устанавливаются заранее с помощью первых координат (Xu, Yu) и вторых координат (Xd, Yd) в качестве переменных.
С другой стороны, настоящее изобретение предлагает, в качестве первого решения относительно способа управления для устройства перемещения заготовки, способ управления для устройства перемещения заготовки, которое выполнено с возможностью захвата заготовки при помощи устройства заданного захвата и перемещения заготовки между прессами, каждый из которых приводит в движение матрицу. Способ управления включает в себя этап управления положением устройства захвата, на основании результирующего целевого значения, получаемого посредством объединения положения матрицы пресса, расположенного на стороне выше по потоку в направлении перемещения заготовки (положение матрицы на стороне выше по потоку) и положения матрицы пресса, расположенного на стороне ниже по потоку (положение матрицы на стороне ниже по потоку), при этом результирующее целевое значение устанавливают на этом этапе таким образом, чтобы обеспечивалось плавное перемещение устройства захвата.
Кроме того, настоящее изобретение предлагает, в качестве первого решения относительно линии прессования, линию прессования, которая содержит множество прессов, расположенных на заданных расстояниях и каждый из которых приводит в движение матрицу, и устройство перемещения заготовки, которое установлено между прессом на стороне выше по потоку и прессом на стороне ниже по потоку, и которое принимает любое из решений с первого по шестое, относящихся к вышеупомянутому устройству перемещения заготовки для перемещения заготовки.
Эффекты изобретения
В соответствии с настоящим изобретением, устройство перемещения заготовки, выполненное с возможностью захвата заготовки при помощи устройства заданного захвата и перемещения заготовки между прессами, каждый из которых приводит в движение матрицу, отличается тем, что содержит устройство управления перемещением для управления положением устройства захвата, на основании результирующего целевого значения, получаемого посредством объединения положения матрицы на стороне выше по потоку и положения матрицы на стороне ниже по потоку, при этом устройство управления перемещением устанавливает результирующее целевое значение таким образом, чтобы обеспечить плавное перемещение устройства захвата. То есть, плавное перемещение устройства захвата может предотвращать внезапное ускорение и замедление устройства захвата, и может подавлять вибрацию в устройстве перемещения заготовки. Кроме того, оно может предотвращать падение заготовки и повреждение участков устройства перемещения заготовки с низкой механической жесткостью (другими словами, нет никакой необходимости увеличивать механическую жесткость участка R перемещения заготовки).
Краткое описание чертежей
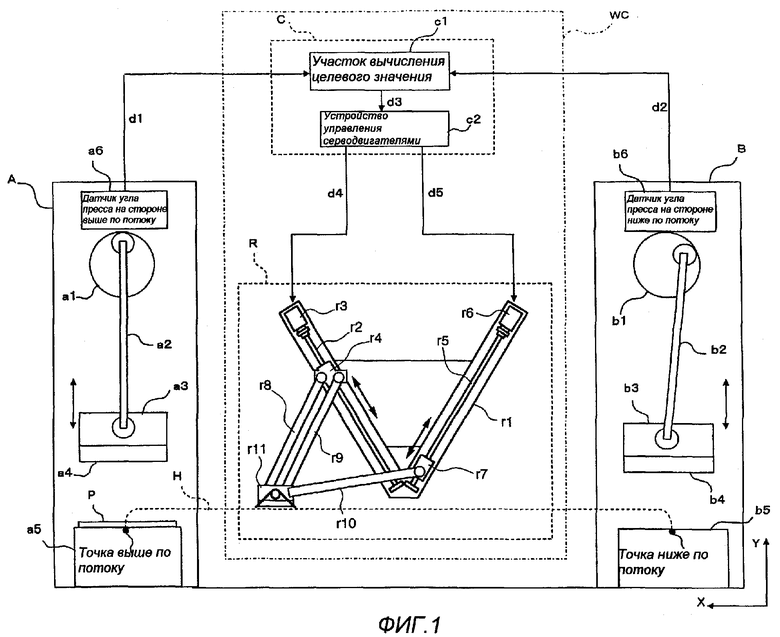
Фиг.1 представляет собой схематическое представление, показывающее конфигурацию управления углом сдвига фаз, относящуюся к тандемно расположенной линии прессования, снабженной устройством перемещения заготовки в соответствии с первым вариантом осуществления настоящего изобретения.
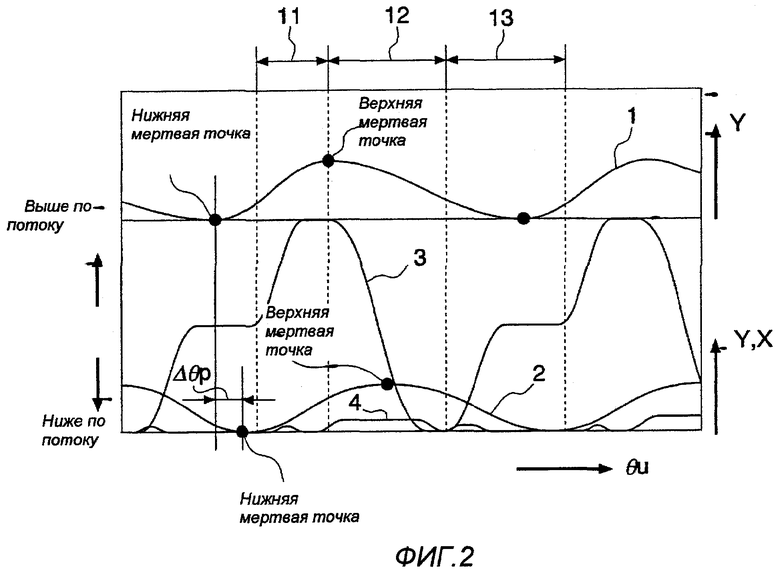
Фиг.2 представляет собой временную диаграмму, показывающую зависимость между углом θu пресса на стороне выше по потоку, а также углом θd пресса на стороне ниже по потоку, и положением участка r11 захвата заготовки на пути H перемещения в первом варианте осуществления.
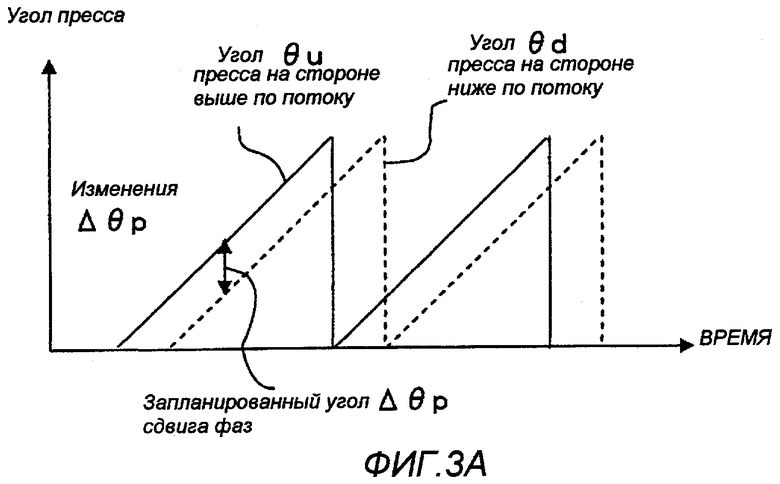
Фиг.3A показывает временное изменение угла θu пресса на стороне выше по потоку и угла θd пресса на стороне ниже по потоку в первом варианте осуществления.
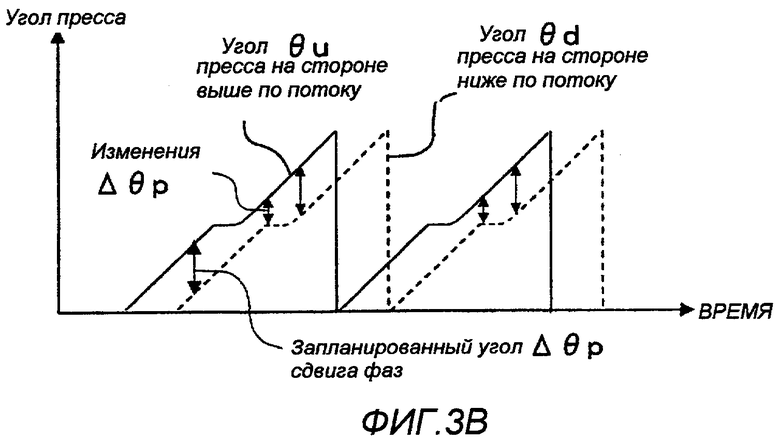
Фиг.3B показывает временное изменение угла θu пресса на стороне выше по потоку и угла θd пресса на стороне ниже по потоку в существующей линии прессования.
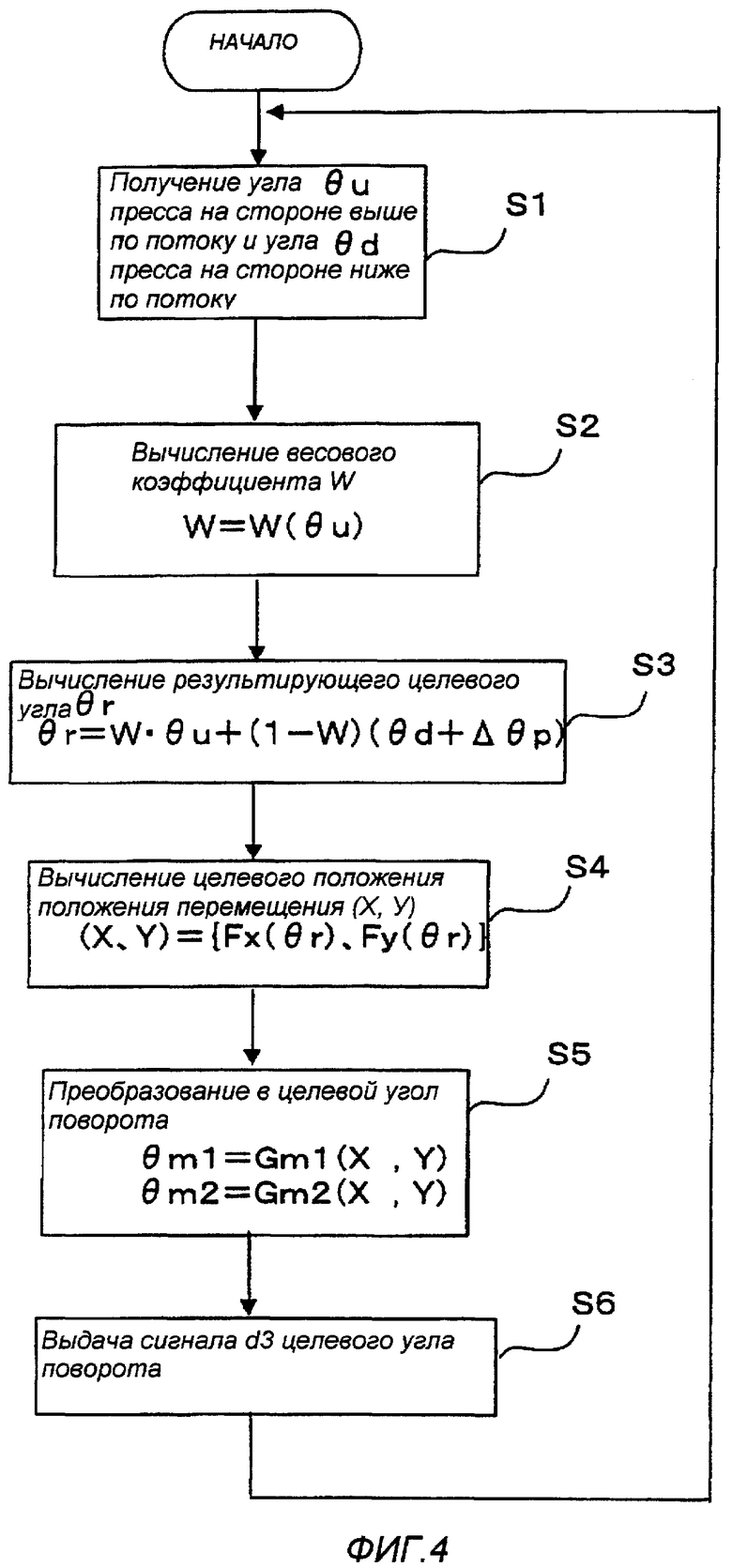
Фиг.4 представляет собой блок-схему, показывающую функционирование участка с1 вычисления целевого значения в первом варианте осуществления.
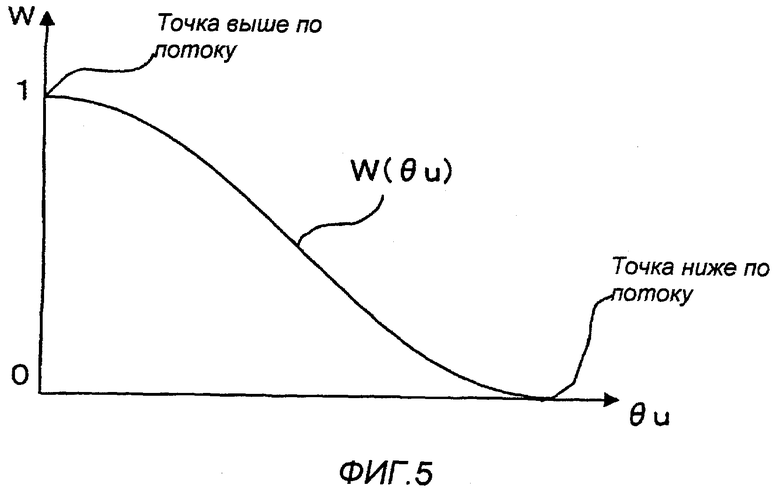
Фиг.5 представляет собой характеристическую диаграмму весовой функции W(θu) в первом варианте осуществления.
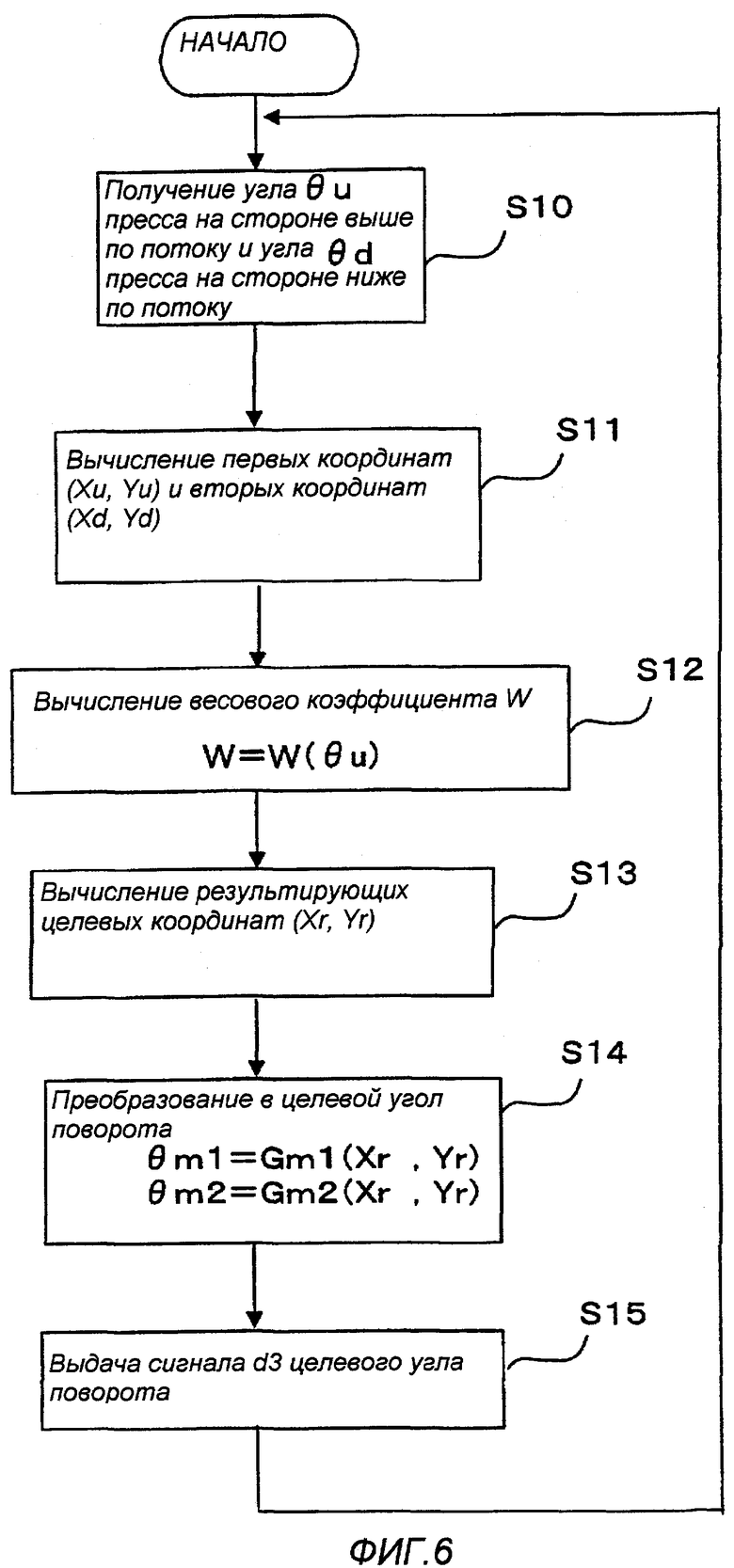
Фиг.6 представляет собой блок-схему, показывающую функционирование участка с1 вычисления целевого значения во втором варианте осуществления.
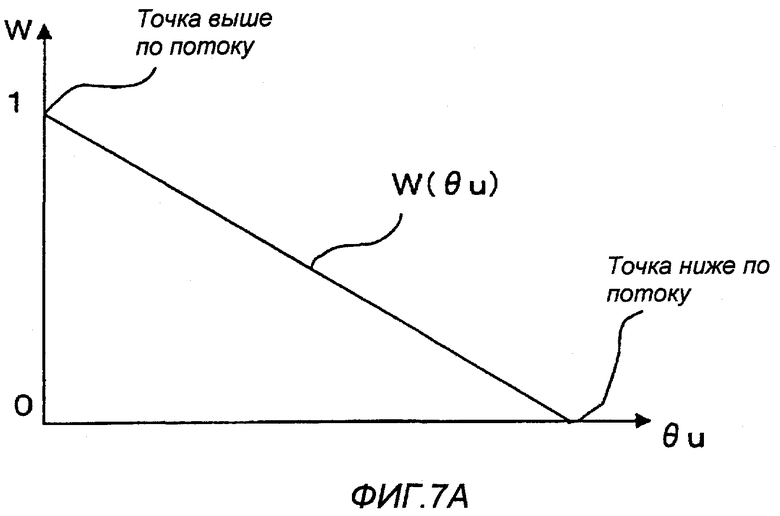
Фиг.7А представляет собой альтернативный пример весовой функции W(θu) в первом и втором вариантах осуществления.
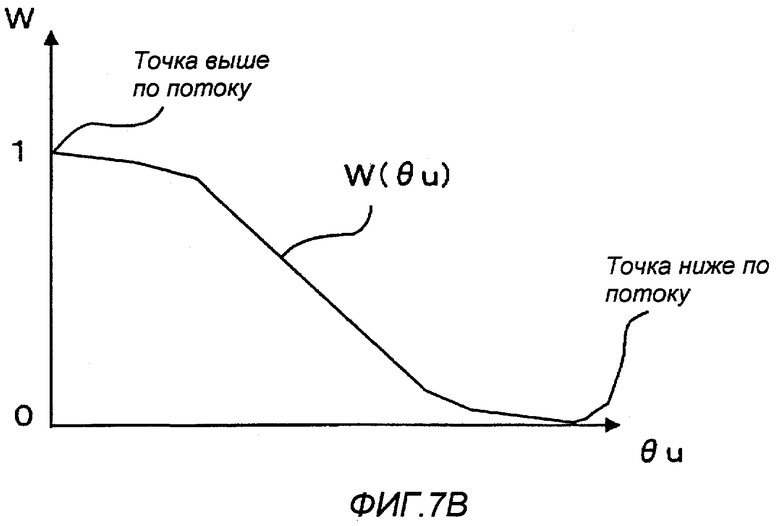
Фиг.7B представляет собой другой альтернативный пример весовой функции W(θu) в первом и втором вариантах осуществления.
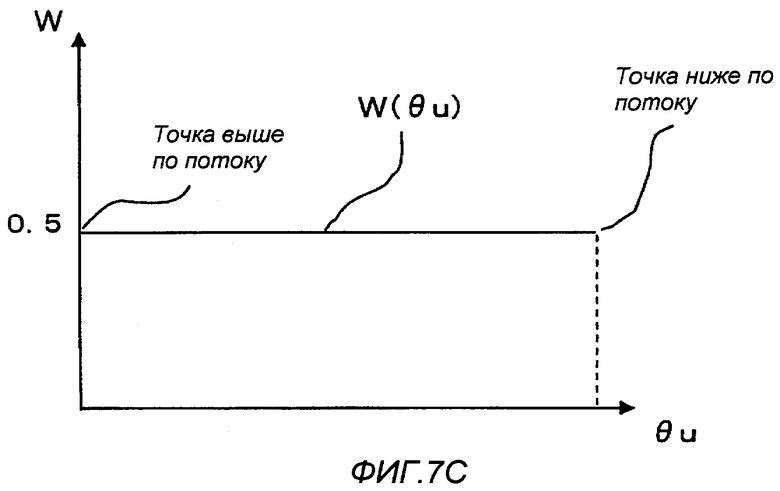
Фиг.7C представляет собой другой альтернативный пример весовой функции W(θu) в первом и втором вариантах осуществления.
Краткое описание ссылочных позиций
A: пресс на стороне выше по потоку, B: пресс на стороне ниже по потоку, WC: устройство перемещения заготовки, C: участок управления, с1: участок вычисления целевого значения, c2: устройство управления серводвигателями, R: участок перемещения заготовки, r11: участок захвата заготовки, P: заготовка.
Предпочтительный вариант осуществления изобретения
Первый вариант осуществления
Ниже представлено описание первого варианта осуществления настоящего изобретения со ссылкой на чертежи.
На фиг.1 показано схематическое представление, показывающее конфигурацию управления углом сдвига фаз, относящуюся к тандемно расположенной линии прессования, снабженной устройством перемещения заготовки в соответствии с первым вариантом осуществления настоящего изобретения. На чертеже, ссылочная позиция А обозначает пресс на стороне выше по потоку; B обозначает пресс на стороне ниже по потоку; WC обозначает устройство перемещения заготовки; а P обозначает заготовку. Устройство WC перемещения заготовки состоит из: участка C управления, включающего в себя участок с1 вычисления целевого значения и устройство управления c2 серводвигателями; и участка R перемещения заготовки. На фиг.1, направление подачи (переднее) заготовки P определяет направление оси X, а направление ее подъема (перпендикулярное) определяет направление оси Y.
Как показано на фиг.1, пресс А на стороне выше по потоку и пресс В на стороне ниже по потоку обеспечены разнесенными через зону перемещения заготовки. Заготовка P переносится от пресса А на стороне выше по потоку к прессу В на стороне ниже по потоку через путь H перемещения (от точки выше по потоку к точке ниже по потоку) с помощью устройства WC перемещения заготовки (более конкретно, участка r11 захвата заготовки), которое предусмотрено в зоне перемещения заготовки. В соответствующей тандемно расположенной линии прессования предусмотрено множество прессов подобной конфигурации на стороне ниже по потоку пресса В на стороне ниже по потоку. Однако, в настоящем варианте осуществления они опущены.
Пресс А на стороне выше по потоку состоит из: главной передачи а1 пресса; стержня а2 пресса; участка а3 крепления матрицы (ползуна); матрицы a4 на стороне выше по потоку; платформы a5 заготовки и датчика а6 угла пресса на стороне выше по потоку. Главная передача а1 пресса и один конец стержня а2 пресса соединены друг с другом с возможностью вращения относительно вертикальной оси плоскости XY. Точно так же другой конец стержня а2 пресса и ползуна a3 соединены друг с другом с возможностью вращения относительно вертикальной оси плоскости XY. Эти главная передача а1 пресса, стержень а2 пресса и ползун a3 образуют кривошипно-шатунный механизм, и следовательно, ползун a3 приводится в движение посредством возвратно-поступательного движения в направлении оси Y с помощью приведения во вращательное движение от главной передачи а1 пресса. Матрица a4 на стороне выше по потоку установлена на нижнем участке ползуна a3. Аналогично ползуну a3, матрица a4 на стороне выше по потоку перемещается возвратно-поступательным образом в направлении оси Y. Платформа a5 заготовки представляет собой платформу для прессования заготовки P. Формовка выполняется посредством прессования заготовки P на этой платформе a5 заготовки с помощью матрицы a4 на стороне выше по потоку. Датчик а6 угла пресса на стороне выше по потоку представляет собой, например, датчик положения. Он определяет угол поворота (угол пресса на стороне выше по потоку) θu главной передачи а1 пресса и передает сигнал d1 угла пресса на стороне выше по потоку, который представляет вышеупомянутый угол θu пресса на стороне выше по потоку, на участок с1 вычисления целевого значения. Этот угол θu пресса на стороне выше по потоку представляет положение матрицы a4 на стороне выше по потоку в направлении оси Y.
Пресс В на стороне ниже по потоку состоит из: главной передачи b1 пресса; стержня b2 пресса; ползуна b3; матрицы b4 на стороне ниже по потоку; платформы b5 заготовки и датчика b6 угла пресса на стороне ниже по потоку. Описание составных частей, подобных частям вышеупомянутого пресса А на стороне выше по потоку, опущено. Здесь, датчик b6 угла пресса на стороне ниже по потоку определяет угол поворота (угол пресса на стороне ниже по потоку) θd главной передачи b1 пресса и передает сигнал d2 угла пресса на стороне ниже по потоку, который представляет угол θd пресса на стороне ниже по потоку, на участок с1 вычисления целевого значения.
Хотя это не показано на чертеже, пресс А на стороне выше по потоку и пресс В на стороне ниже по потоку, соответственно, снабжены приводным узлом для приведения в движение главной передачи а1 пресса и главной передачи b1 пресса, соответственно. Главная передача а1 пресса и главная передача b1 пресса приводятся во вращательное движение с заданным углом сдвига фаз (запланированным углом Δθp сдвига фаз).
Участок R перемещения заготовки представляет собой роботизированную руку для перемещения заготовки, с шарнирным параллелограммом V-образной формы. Он состоит из: основного участка r1 V-образной формы; первого шарикового ходового винта r2; первого серводвигателя r3; первого ползуна r4; второго шарикового ходового винта r5; второго серводвигателя r6; второго ползуна r7; первого соединительного рычага r8; второго соединительного рычага r9; третьего соединительного рычага r10 и участка r11 захвата заготовки.
Основной участок r1 V-образной формы представляет собой двусторонне симметричный базовый элемент V-образной формы для роботизированной руки. Он установлен между прессом А на стороне выше по потоку и прессом В на стороне ниже по потоку посредством закрепления на рычаге, предусмотренном для станины пресса, не показанном на чертеже, или посредством подвешивания от потолка и т.д. Первый шариковый ходовой винт r2, первый серводвигатель r3 и первый ползун r4 образуют поступательный исполнительный механизм. Вращение первого серводвигателя r3, соединенного с первым шариковым ходовым винтом r2, линейно приводит в движение первый ползун r4. Точно так же, второй шариковый ходовой винт r5, второй серводвигатель r6 и второй ползун r7 образуют поступательный исполнительный механизм. Вращение второго серводвигателя r6, соединенного со вторым шариковым ходовым винтом r5, линейно приводит в движение второй ползун r7. Эти поступательные исполнительные механизмы установлены на основном участке r1 V-образной формы двусторонне симметрично. Они независимо управляемо приводятся в движение, соответственно, с помощью сигнала d4 приведения в движение первого серводвигателя и сигнала d5 приведения в движение второго серводвигателя, соответственно, вводимых в первый серводвигатель r3 и второй серводвигатель r6 от задающего устройства управления c2 серводвигателями участка C управления.
Одни концы первого соединительного рычага r8 и второго соединительного рычага r9 соединены c первым ползуном r4 с возможностью вращения относительно вертикальной оси плоскости XY; другие их концы соединены с участком r11 захвата заготовки, также с возможностью вращения относительно вертикальной оси плоскости XY. С другой стороны, одни концы третьего соединительного рычага r10 соединены со вторым ползуном r7 с возможностью вращения относительно вертикальной оси плоскости XY; его другой конец вместе с другим концом второго соединительного рычага r9 соединен с участком r11 захвата заготовки, также с возможностью вращения относительно вертикальной оси плоскости XY. Первый соединительный рычаг r8, второй соединительный рычаг r9 и третий соединительный рычаг r10 равны по длине рычага, и первый соединительный рычаг r8 и второй соединительный рычаг r9 соединены таким образом, что являются параллельными друг другу. На нижнем участке этого участка r11 захвата заготовки предусмотрена вакуумная притягивающая присоска для вакуумного захвата заготовки P.
Как описано выше, первый ползун r4, второй ползун r7, первый соединительный рычаг r8, второй соединительный рычаг r9, третий соединительный рычаг r10 и участок r11 захвата заготовки образуют рычажной механизм. Следовательно, первый ползун r4 и второй ползун r7 линейно приводятся в движение независимо друг от друга под управлением участка C управления, и таким образом, координаты XY (целевое положение перемещения) участка r11 захвата заготовки на пути перемещения Н являются управляемыми.
На участке С управления, участок с1 вычисления целевого значения имеет уже запомненную весовую функцию W(θu), которая принимает угол θu пресса на стороне выше по потоку в качестве переменной. Он вычисляет весовой коэффициент W посредством подстановки угла θu пресса на стороне выше по потоку, полученного из сигнала d1 угла пресса на стороне выше по потоку, в весовую функцию W(θu), и затем вычисляет результирующий целевой угол θr на основании угла θu пресса на стороне выше по потоку, угла θd пресса на стороне ниже по потоку, предварительно сохраненного запланированного угла Δθp сдвига фаз и следующего уравнения синтеза (1), относящегося к вышеупомянутому весовому коэффициенту W.
Кроме того, участок с1 вычисления целевого значения уже имеет сохраненные функции профиля движения, которые определяют целевое положение перемещения участка r11 захвата заготовки, то есть координаты XY участка r11 захвата заготовки на пути Н перемещения. Он приобретает целевое положение перемещения участка r11 захвата заготовки посредством подстановки результирующего целевого угла θr, рассчитанного из вышеупомянутого уравнения синтеза (1), в вышеупомянутые функции профиля движения, преобразовывает вышеупомянутое целевое положение перемещения в целевой угол поворота первого серводвигателя r3 и второго серводвигателя r6, и затем выдает сигнал d3 целевого угла поворота, который представляет вышеупомянутый целевой угол поворота, на устройство управления c2 серводвигателями. Подробное описание весовой функции W(θu), запланированного угла Δθp сдвига фаз и функций профиля движения, как описано выше, будет приведено позже.
На основании вышеупомянутого сигнала d3 целевого угла поворота, устройство управления c2 серводвигателями выдает сигнал d4 приведения в движение первого серводвигателя, для приведения в движение первого серводвигателя r3, в первый серводвигатель r3, а также выдает сигнал d5 приведения в движение второго серводвигателя, для приведения в движение второго серводвигателя r6, во второй серводвигатель r6.
Далее представлено описание работы тандемно расположенной линии прессования управляемым углом сдвига фаз, снабженной устройством WC перемещения заготовки, сконфигурированным, как описано выше.
В тандемно расположенной линии прессования с управляемым углом сдвига фаз, угол θu пресса на стороне выше по потоку и угол θd пресса на стороне ниже по потоку управляются таким образом, чтобы они имели заданный угол сдвига фаз (запланированный угол сдвига фаз) Δθp. На фиг.2 показана временная диаграмма, изображающая работу матрицы a4 на стороне выше по потоку и матрицы b4 на стороне ниже по потоку, у которых угол сдвига фаз управляется этим способом, и участка r11 захвата заготовки. На этом чертеже, ось абсцисс представляет угол θu пресса на стороне выше по потоку; ссылочная позиция 1 обозначает позиционное изменение матрицы a4 на стороне выше по потоку в направлении оси Y; ссылочная позиция 2 обозначает позиционное изменение матрицы b4 на стороне ниже по потоку в направлении оси Y; ссылочная позиция 3 обозначает позиционное изменение участка r11 захвата заготовки на пути Н перемещения в направлении оси X; и ссылочная позиция 4 обозначает позиционное изменение участка r11 захвата заготовки на пути перемещения Н в направлении оси Y.
На фиг.2, в процессе 11, поскольку матрица a4 на стороне выше по потоку перемещается вверх к верхней мертвой точке, участок r11 захвата заготовки перемещается к платформе a5 заготовки (точка выше по потоку) пресса А на стороне выше по потоку и выполняет вакуумный захват заготовки P на платформе a5 заготовки, которая подвергается формовке с помощью прессования. В процессе 12, участок r11 захвата заготовки перемещается к прессу В на стороне ниже по потоку, в то же время выполняя вакуумный захват заготовки P, и достигает платформы b5 заготовки (точки ниже по потоку) пресса В на стороне ниже по потоку, чтобы переместить заготовку P в течение времени, когда матрица b4 на стороне ниже по потоку расположена около верхней мертвой точки. В процессе 13, из-за того, что матрица a4 на стороне выше по потоку расположена около нижней мертвой точки, участок r11 захвата заготовки ожидает в средней точке между прессом А на стороне выше по потоку и прессом В на стороне ниже по потоку. С повторением вышеупомянутых процессов, заготовка P плавно переносится без мешающего воздействия между участком r11 захвата заготовки и матрицей a4 на стороне выше по потоку, так же как матрицей b4 на стороне ниже по потоку. Запланированный угол Δθp сдвига фаз устанавливается заранее на величину, которая не позволяет участку r11 захвата заготовки сталкиваться с матрицей a4 на стороне выше по потоку и матрицей b4 на стороне ниже по потоку, как описано выше, и которая обеспечивает самую высокую эффективность производства.
Как показано на фиг.2, зависимость между положениями матрицы a4 на стороне выше по потоку, а также матрицы b4 на стороне ниже по потоку на оси Y и положением участка r11 захвата заготовки на пути Н перемещения, то есть целевым положением перемещения, однозначно определена. Целевое положение перемещения может быть выражено функциями Fx(θu) и Fy(θu), которые принимают угол θu пресса на стороне выше по потоку в качестве переменной. Здесь функция, которая представляет величину координаты X, является Fx(θu), а функция, которая представляет величину координаты Y, является Fy(θu). Функции Fx(θu) и Fy(θu), которые устанавливают связь угла θu пресса на стороне выше по потоку с целевым положением перемещения участка r11 захвата заготовки таким способом, упоминаются как функции профиля движения участка r11 захвата заготовки, а угол θu пресса на стороне выше по потоку в качестве переменной упоминается, как угол объекта синхронизации.
Запланированный угол Δθp сдвига фаз и функции профиля движения устанавливаются заранее посредством моделирования действий на фиг.2. Поэтому, в случае современного контроля перемещения над участком r11 захвата заготовки, если только угол θu пресса на стороне выше по потоку определен, можно выполнять плавное управление углом сдвига фаз, как показано на фиг.2, посредством подстановки угла θu пресса на стороне выше по потоку в вышеупомянутые функции профиля движения, с целью вычисления целевого положения перемещения участка r11 захвата заготовки.
Моделирование, как показано выше, предполагает, что имеется однозначная зависимость между положениями матрицы a4 на стороне выше по потоку и матрицы b4 на стороне ниже по потоку по оси Y; и что целевое положение перемещения участка r11 захвата заготовки не будет приводить к неудаче; и что соотношение "угол θu пресса на стороне выше по потоку = углу θd пресса на стороне ниже по потоку + запланированный угол Δθp сдвига фаз" всегда удовлетворяется. Однако, в современных линиях прессования однозначная зависимость, как описано выше, нарушается из-за уменьшения скорости перемещения матрицы, производимой при прессовании заготовки P, погрешности управления в управлении углом сдвига фаз между прессом А на стороне выше по потоку и прессом В на стороне ниже по потоку, или подобных причин, и таким образом, запланированный угол Δθp сдвига фаз отличается от величины, приобретенной на основании моделирования.
На фиг.3A и фиг.3B показаны временные изменения в запланированном угле Δθp сдвига фаз. На фиг.3 показано идеальное временное изменение угла θu пресса на стороне выше по потоку и угла θd пресса на стороне ниже по потоку, полученные с помощью моделирования. В таком случае, запланированный угол Δθp сдвига фаз всегда является постоянным, как показано на чертеже. На фиг.3B показано временное изменение угла θu пресса на стороне выше по потоку и угла θd пресса на стороне ниже по потоку в современной линии прессования.
В случае, относящемся к фиг.3B, то есть когда соотношение θu=θd+Δθp не поддерживается, если целевое положение перемещения участка r11 захвата заготовки приобретается, в соответствии с моделированием, из функций профиля движения, которые принимают угол θu пресса на стороне выше по потоку в качестве угла объекта синхронизации, и участок r11 захвата заготовки перемещается в эти координаты XY, существует возможность, что матрица b4 на стороне ниже по потоку и участок r11 захвата заготовки будут сталкиваться друг с другом. Кроме того, если для предотвращения такого мешающего воздействия между участком r11 захвата заготовки и матрицей b4 на стороне ниже по потоку угол объекта синхронизации мгновенно переключается с угла θu пресса на стороне выше по потоку на угол θd пресса на стороне ниже по потоку, когда участок r11 захвата заготовки приближается к области мешающего воздействия с матрицей b4 на стороне ниже по потоку, существует возможность, что к участку r11 захвата заготовки будут применяться внезапное ускорение и замедление, вызывая вибрацию, и таким образом вызывая падение заготовки P, или приводя к тому, что части участка R перемещения заготовки с низкой механической жесткостью будут повреждены.
Поэтому, в устройстве WC перемещения заготовки в первом варианте осуществления вместо угла объекта синхронизации используется результирующий целевой угол θr, который будет описан позже. Ниже представлено подробное описание работы участка с1 вычисления целевого значения для вычисления этого результирующего целевого угла θr, со ссылкой на блок-схему, показанную на фиг.4.
Сначала, участок с1 вычисления целевого значения получает сигнал d1 угла пресса на стороне выше по потоку, то есть угол θu пресса на стороне выше по потоку, от датчика a6 угла пресса на стороне выше по потоку, а также получает сигнал d2 угла пресса на стороне ниже по потоку, то есть угол θd пресса на стороне ниже по потоку, от датчика b6 угла пресса на стороне ниже по потоку (Этап S1).
Затем, участок с1 вычисления целевого значения вычисляет весовой коэффициент W посредством подстановки угла θu пресса на стороне выше по потоку в весовую функцию W(θu) (Этап S2). Эта весовая функция W(θu) представляет собой косинусоидную функцию, которая принимает угол θu пресса на стороне выше по потоку в качестве переменной, как показано на фиг.5. Здесь, угол θu пресса на стороне выше по потоку в качестве переменной представляет целевое положение перемещения участка r11 захвата заготовки. Поэтому, как видно из этого чертежа, характеристики представляют собой то, что весовой коэффициент W является высоким (W=1 в самой высокой точке), когда участок r11 захвата заготовки расположен около точки выше по потоку, и уменьшается плавно и непрерывно (W=θ в самой низкой точке), когда он перемещается ближе к точке ниже по потоку.
Затем участок с1 вычисления целевого значения вычисляет результирующий целевой угол θr из вышеупомянутого уравнения (1) синтеза на основании весового коэффициента W, приобретенного на этапе S2, угол θu пресса на стороне выше по потоку, угол θd пресса на стороне ниже по потоку и запланированный угол Δθp сдвига фаз (Этап S3). Как видно из фиг.5 и вышеупомянутого уравнения (1) синтеза, когда участок r11 захвата заготовки расположен в точке выше по потоку, результирующий целевой угол θr становится равным углу θu пресса на стороне выше по потоку, потому что весовой коэффициент W равен 1. Результирующий целевой угол θr плавно изменяется в соответствии с характеристиками весовой функции W(θu), когда участок r11 захвата заготовки перемещается к точке ниже по потоку. Когда участок r11 захвата заготовки достигает точки ниже по потоку, результирующий целевой угол θr становится равным углу θd пресса на стороне ниже по потоку + запланированный угол Δθp сдвига фаз, потому что весовой коэффициент W равен 0. То есть, вес угла θu пресса на стороне выше по потоку в результирующем целевом угле θr увеличивается около точки выше по потоку и плавно уменьшается, когда положение приближается к точке ниже по потоку.
Поэтому при подстановке этого результирующего целевого угла θr, вместо угла объекта синхронизации, в вышеупомянутые функции профиля движения, мешающее воздействие между матрицей a4 на стороне выше по потоку и участком r11 захвата заготовки может быть предотвращено около точки выше по потоку, и мешающее воздействие между матрицей b4 на стороне ниже по потоку и участком r11 захвата заготовки может быть предотвращено около точки ниже по потоку. Кроме того, в промежуточном положении между передней по ходу точкой и задней по ходу точкой, результирующий целевой угол θr плавно изменяется в соответствии с характеристиками весовой функции W(θu), таким образом обеспечивая возможность подавления вибрации на участке r11 захвата заготовки.
Как описано выше, участок с1 вычисления целевого значения, после вычисления результирующего целевого угла θr на этапе S3, подставляет результирующий целевой угол θr в предварительно сохраненные функции профиля движения {X=Fx(θu), Y=Fy(θu)}, таким образом вычисляя целевое положение перемещения участка r11 захвата заготовки (Этап S4).
После этого, участок с1 вычисления целевого значения преобразует приобретенное целевое положение перемещения участка r11 захвата заготовки, как было упомянуто выше, в целевые углы поворота первого серводвигателя r3 и второго серводвигателя r6 при помощи функций преобразования (Этап S5). Здесь, предположим, что целевой угол поворота первого серводвигателя r3 составляет θm1, функция преобразования будет Gm1 (X, Y), и предположим, что целевой угол поворота второго серводвигателя r6 составляет θm2, функция преобразования будет Gm2 (X, Y), эти целевой угол θm1 поворота и целевой угол θm2 поворота представлены следующими формулами (2) и (3) преобразования. Следует отметить, что функции преобразования Gm1 (X, Y) и Gm2 (X, Y) однозначно определены конфигурацией участка R перемещения заготовки (длинами и диаметрами первого шарикового ходового винта r2 и второго шарикового ходового винта r5, длинами первого соединительного рычага r8, второго соединительного рычага r9 и третьего соединительного рычага r10, или подобными параметрами).


Участок с1 вычисления целевого значения тогда выдает сигнал d3 целевого угла поворота, который представляет вышеупомянутые целевые углы θm1 и θm2 поворота, на устройство управления c2 серводвигателями (Этап S6). На основании вышеупомянутого сигнала d3 целевого угла поворота, устройство управления c2 серводвигателями генерирует сигнал d4 приведения в движение первого серводвигателя и подает его в первый серводвигатель r3. Устройство управления c2 серводвигателями также генерирует сигнал d5 приведения в движение второго серводвигателя и подает его во второй серводвигатель r6.
Первый серводвигатель r3 поворачивается на целевой угол θm1 поворота на основании вышеупомянутого сигнала d4 приведения в движение первого серводвигателя, для приведения в движение первого ползуна r4. Второй серводвигатель r6 поворачивается на целевой угол поворота θm2 на основании вышеупомянутого сигнала d5 приведения в движение второго серводвигателя, для приведения в движение второго ползуна r7. В результате, участок r11 захвата заготовки перемещается в целевое положение перемещения.
Повторяя действия этапов S1 - S6, как описано выше, участок с1 вычисления целевого значения вычисляет результирующий целевой угол θr, основанный на изменениях угла θu пресса на стороне выше по потоку и угла θd пресса на стороне ниже по потоку, таким образом управляя целевым положением перемещения участка r11 захвата заготовки.
Как описано выше, в соответствии с первым вариантом осуществления устройством WC перемещения заготовки весовая функция W(θu) используется для приобретения результирующего целевого угла θr с помощью характеристик увеличения веса угла θu пресса на стороне выше по потоку при нахождении на стороне выше по потоку и плавного уменьшения веса угла θu пресса на стороне выше по потоку по мере приближения положения к стороне ниже по потоку. Управление целевым положением перемещения участка r11 захвата заготовки синхронно с этим результирующим целевым углом θr обеспечивает подавление вибрации на участке r11 захвата заготовки, а также обеспечивает плавное перемещение заготовки P без мешающего воздействия между матрицей a4 на стороне выше по потоку, так же как матрицы b4 на стороне ниже по потоку, и участком r11 захвата заготовки. Кроме того, это может предотвращать падение заготовки P и повреждение частей участка R перемещения заготовки с низкой механической жесткостью (другими словами, нет никакой необходимости увеличивать механическую жесткость участка R перемещения заготовки).
Второй вариант осуществления
Далее представлено описание второго варианта осуществления настоящего изобретения. В этом втором варианте осуществления будет описан другой способ вычисления целевого положения перемещения. Второй вариант осуществления имеет такую же конфигурацию устройств, как и первый вариант осуществления. Поэтому ее описание опущено, и последующее описание представлено главным образом для функционирования участка с1 вычисления целевого значения.
На фиг.6 показана блок-схема участка с1 вычисления целевого значения во втором варианте осуществления. Сначала, аналогично первому варианту осуществления, участок с1 вычисления целевого значения получает угол θu пресса на стороне выше по потоку от датчика a6 угла пресса на стороне выше по потоку, а также получает угол θd пресса на стороне ниже по потоку от датчика b6 угла пресса на стороне ниже по потоку (Этап S10).
После этого, участок с1 вычисления целевого значения подставляет угол θu пресса на стороне выше по потоку, полученный на вышеупомянутом этапе S10, в функции профиля движения {Fx(θu), Fy(θu)}, чтобы приобрести первые координаты (Xu, Yu)={Fx(θu), Fy(θu)}. Участок с1 вычисления целевого значения также подставляет угол θd пресса на стороне ниже по потоку+запланированный угол Δθp сдвига фаз, вместо угла θu пресса на стороне выше по потоку, в вышеупомянутые функции профиля движения {Fx(θu), Fy(θu)}, чтобы приобрести вторые координаты (Xd, Yd)={Fx(θd+Δθp), Fy(θd+Δθp)} (Этап S11).
Как описано в первом варианте осуществления, в идеальной линии прессования, в которой всегда поддерживается соотношение: угол θu пресса на стороне выше по потоку=углу θd пресса на стороне ниже по потоку+запланированный угол Δθp сдвига фаз, первые координаты (Xu, Yu) должны быть равны вторым координатам (Xd, Yd). Поэтому, в идеальном случае, подобном этому, если либо первые координаты (Xu, Yu), либо вторые координаты (Xd, Yd) выбраны в качестве целевого положения перемещения, и участок r11 захвата заготовки управляемо перемещают в целевое положение перемещения, то участок r11 захвата заготовки может перемещать заготовку P без столкновений с матрицей a4 на стороне выше по потоку и матрицей b4 на стороне ниже по потоку.
Однако, как описано выше, в существующих линиях прессования, однозначная зависимость "угол θu пресса на стороне выше по потоку = углу θd пресса на стороне ниже по потоку + запланированный угол Δθp сдвига фаз" нарушается из-за уменьшения скорости перемещения матрицы, возникаемого при прессовании заготовки P, погрешности управления в управлении углом сдвига фаз между прессом А на стороне выше по потоку и прессом В на стороне ниже по потоку, или подобных причин, и таким образом, запланированный угол Δθp сдвига фаз отличается от величины, приобретенной на основании моделирования. В результате, вышеупомянутые первые координаты (Xu, Yu) становятся отличающимися от вышеупомянутых вторых координат (Xd, Yd). Поэтому, например, если первые координаты (Xu, Yu) выбраны в качестве целевого положения перемещения, и участок с11 захвата заготовки управляемо перемещают в целевое положение перемещения, то существует возможность, что участок r11 захвата заготовки столкнется с матрицей b4 на стороне ниже по потоку, потому что однозначная зависимость между положением матрицы b4 на стороне ниже по потоку и целевым положением перемещения больше не выполняется. Точно так же в случае, в котором вместо этого в качестве целевого положения перемещения выбраны вторые координаты (Xd, Yd), существует возможность, что участок r11 захвата заготовки столкнется с матрицей a4 на стороне выше по потоку.
Поэтому, аналогично первому варианту осуществления, участок с1 вычисления целевого значения подставляет угол θu пресса на стороне выше по потоку в весовую функцию W(θu) фиг.5, чтобы вычислить весовой коэффициент W (Этап S12), и объединяет соответствующую величину координаты X и соответствующие величины координаты Y первых координат (Xu, Yu) и вторых координат (Xd, Yd) из следующих уравнений (4) и (5) синтеза, чтобы вычислить результирующие целевые координаты (Xr, Yr) (Этап S13).
Когда вышеупомянутые результирующие целевые координаты (Xr, Yr) используются для целевого положения перемещения участка r11 захвата заготовки, увеличение веса первых координат (Xu, Yu), которые принимают угол θu пресса на стороне выше по потоку в качестве угла объекта синхронизации, может предотвращать мешающее воздействие участка r11 захвата заготовки с матрицей a4 на стороне выше по потоку пресса А на стороне выше по потоку (где весовой коэффициент W приближается к 1); увеличение веса вторых координат (Xd, Yd), которые принимают угол θd пресса на стороне ниже по потоку+запланированный угол Δθp сдвига фаз в качестве угла объекта синхронизации, может предотвращать столкновение участка r11 захвата заготовки с матрицей b4 на стороне ниже по потоку около пресса В на стороне ниже по потоку (где весовой коэффициент W приближается к 0); и вибрация на участке r11 захвата заготовки может быть предотвращена, потому что весовой коэффициент W плавно изменяется в соответствии с характеристиками, показанными на фиг.5, по мере того, как участок r11 захвата заготовки перемещается от пресса А на стороне выше по потоку к прессу В на стороне ниже по потоку.
Затем участок с1 вычисления целевого значения, аналогично первому варианту осуществления, использует следующие формулы (6) и (7) преобразования, чтобы преобразовать приобретенные результирующие целевые координаты (Xr, Yr) участка r11 захвата заготовки, как описано выше, в целевые углы поворота первого серводвигателя r3 и второго серводвигателя r6 (Этап S14). Здесь, целевой угол поворота первого серводвигателя r3 представляет θm1, и его функцией преобразования является Gm1 (Xr, Yr); а целевой угол поворота второго серводвигателя r6 представляет θm2, и его функцией преобразования является Gm2(Xr, Yr).


Затем участок с1 вычисления целевого значения выдает сигнал d3 целевого угла поворота, который представляет вышеупомянутые целевые углы θm1 и θm2 поворота, на устройство управления c2 серводвигателями (Этап S15). На основании вышеупомянутого сигнала d3 целевого угла поворота, устройство управления c2 серводвигателями генерирует сигнал d4 приведения в движение первого серводвигателя и сигнал d5 приведения в движение второго серводвигателя и передает их, соответственно, в первый серводвигатель r3 и второй серводвигатель r6.
Первый серводвигатель r3 поворачивается на целевой угол θm1 поворота, на основании вышеупомянутого сигнала d4 приведения в движение первого серводвигателя, чтобы линейно привести в движение первый ползун r4. Второй серводвигатель r6 поворачивается на целевой угол поворота θm2, на основании вышеупомянутого сигнала d5 приведения в движение второго серводвигателя, чтобы линейно привести в движение второй ползун r7. В результате, участок r11 захвата заготовки перемещается в результирующие целевые координаты (Xr, Yr).
Как описано выше, аналогично первому варианту осуществления, второй вариант осуществления обеспечивает подавление вибрации на участке r11 захвата заготовки, а также обеспечивает плавное перемещение заготовки P без мешающего воздействия между матрицей a4 на стороне выше по потоку, так же как матрицей b4 на стороне ниже по потоку, и участком r11 захвата заготовки.
Настоящее изобретение не ограничено вышеупомянутыми вариантами осуществления. Например, можно представить следующие модификации.
(1): В вышеупомянутых первом и втором вариантах осуществления, в качестве весовой функции W(θu) определена косинусоидная функция. Однако изобретение этим не ограничено. Может быть принята функция, как показано на фиг.7A, которая монотонно уменьшается и является непрерывной. Кроме того, функция может быть определена комбинацией линий, как показано на фиг.7B. В отличие от этого, в качестве весовой функции W(θu) может использоваться любая функция до тех пор, пока она имеет такие характеристики, как увеличение веса угла θu пресса на стороне выше по потоку около точки выше по потоку и уменьшение веса на углу θu пресса на стороне выше по потоку около точки ниже по потоку. Однако функции, которые имеют внезапное изменение, которое может вызывать вибрацию в участке r11 захвата заготовки, в качестве весовой функции W(θu) использоваться не могут.
Например, функции, которые могут использоваться в качестве весовой функции W(θu), включают в себя: сигмоидальные функции, такие как сигмоидальная логистическая функция, сигмоидальная функция Ричардза и сигмоидальная функция Вейбулла; или функция Больцмана; функция Хилла и функция Гомперца.
Кроме того, в качестве весовой функции W(θu) может быть принята функция, представленная кривой в виде кулачка. В качестве кривой в виде кулачка могут использоваться, например, модифицированная трапецеидальная кривая, модифицированная синусоидальная кривая, любая из полиномиальных кривых третьего-пятого порядка, или подобная кривая. В случае, в котором функция или кривая, как описана выше, используется в качестве весовой функции W(θu), очевидно, что угол θu пресса на стороне выше по потоку принимается в качестве переменной.
Кроме того, весовая функция W(θu) может быть не функцией угла θu пресса на стороне выше по потоку, а константой, как показано на фиг.7C. Например, полагая, что W=0,5, угол θu пресса на стороне выше по потоку и угол θd пресса на стороне ниже по потоку + запланированный угол Δθp сдвига фаз всегда объединяются в четном соотношении на основании вышеупомянутого уравнения (1) синтеза. Поэтому, влияние изменения запланированного угла Δθp сдвига фаз, как показано на фиг.3B, может быть усреднено и снижено, таким образом уменьшая возможность мешающего воздействия между участком r11 захвата заготовки и матрицей.
(2): В вышеупомянутом первом варианте осуществления, после определения весовой функции W(θu) и подстановки в нее угла θu пресса на стороне выше по потоку для вычисления весового коэффициента W, результирующий целевой угол θr извлекается из вышеупомянутого уравнения (1) синтеза. Однако изобретение этим не ограничено. Вышеупомянутый результирующий целевой угол θr может быть предварительно установлен в таблице, которая принимает угол θu пресса на стороне выше по потоку и угол θd пресса на стороне ниже по потоку в качестве переменных, и результирующий целевой угол θr может быть извлечен из этой таблицы на основании углов θu пресса на стороне выше по потоку и углов θd пресса на стороне ниже по потоку, задаваемых от соответствующих прессов. Аналогично этому, также и во втором варианте осуществления, результирующие целевые координаты (Xr, Yr) могут быть предварительно установлены в таблицах, которые принимают первые координаты (Xu, Yu) и вторые координаты (Xd, Yd) в качестве переменных (например, могут быть установлены таблица для нахождения величины Xr результирующих целевых координат и таблица для нахождения их величины Yr), и после вычисления первых координат (Xu, Yu) и вторых координат (Xd, Yd) из функций профиля движения, основываясь на углах θu пресса на стороне выше по потоку и на углах θd пресса на стороне ниже по потоку, задаваемых от соответствующих аппаратов прессов, результирующие целевые координаты (Xr, Yr) могут быть извлечены из вышеупомянутых двух таблиц.
(3): В вышеупомянутых первом и втором вариантах осуществления, в качестве переменной для весовой функции W(θu) используется угол θu пресса на стороне выше по потоку. Однако изобретение этим не ограничено. Например, можно использовать угол θd пресса на стороне ниже по потоку. В качестве альтернативы, можно использовать тот параметр, который представляет целевое положение перемещения участка r11 захвата заготовки, например, время, полученное посредством деления угла θu пресса на стороне выше по потоку или угла θd пресса на стороне ниже по потоку на его скорость вращения, или подобный параметр.
(4): В вышеупомянутых первом и втором вариантах осуществления, участок r11 захвата заготовки имеет только два направления перемещения, то есть направления осей X и Y. Однако изобретение этим не ограничено. Участок r11 захвата заготовки может иметь другое направление перемещения, такое как направление наклонного перемещения в плоскости XY или подобное направление. В этом случае, результирующее целевое значение для наклонного перемещения также приобретается при помощи весовой функции W(θu). В результате, можно предотвращать столкновения участка r11 захвата заготовки с матрицами соответствующих прессов и подавлять вибрацию на участке r11 захвата заготовки.
Промышленная применимость
В соответствии с настоящим изобретением, устройство перемещения заготовки, выполненное с возможностью захвата заготовки при помощи устройства заданного захвата и перемещения заготовки между прессами, каждый из которых приводит в движение матрицу, отличается тем, что содержит устройство управления перемещением для управления положением устройства захвата на основе результирующего целевого значения, приобретенного посредством объединения положения матрицы на стороне выше по потоку и положения матрицы на стороне ниже по потоку, при этом устройство управления перемещением устанавливает результирующее целевое значение таким образом, чтобы обеспечить плавное перемещение устройства захвата. То есть, плавное перемещение устройства захвата может предотвращать внезапное ускорение и замедление устройства захвата, и может подавлять вибрацию устройства перемещения заготовки. Кроме того, оно может предотвращать падение заготовки и повреждение участков устройства перемещения заготовки с низкой механической жесткостью (другими словами, отсутствует необходимость усиления механической жесткости участка R перемещения заготовки).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПРОФИЛИРОВАНИЯ ГЛУБИНЫ ПОВЕРХНОСТИ ЦЕЛЕВОГО ОБЪЕКТА | 2013 |
|
RU2633922C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВЕДЕНИЕМ В ДВИЖЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2557132C1 |
| СПОСОБ ПРОИЗВОДСТВА СТАЛЬНОЙ ТРУБЫ И ПРЕССУЮЩИЙ ШТАМП, ИСПОЛЬЗУЕМЫЙ ПРИ ДАННОМ СПОСОБЕ | 2015 |
|
RU2663674C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ ГРУЗА | 2013 |
|
RU2600974C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВКИ В МАШИНУ ДЛЯ КОМПРЕССИОННОГО ФОРМОВАНИЯ | 2008 |
|
RU2463161C2 |
| ЭЛЕКТРИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛЕТОМ, УПРАВЛЯЮЩАЯ РУЛЯМИ ВЫСОТЫ ВОЗДУШНОГО СУДНА | 2005 |
|
RU2335007C1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ЗАГОТОВКИ | 2009 |
|
RU2521775C2 |
| НЕПАРАМЕТРИЧЕСКИЕ МИКРОФАСЕТОЧНЫЕ ФАКТОРНЫЕ МОДЕЛИ ДЛЯ ИЗОТРОПНЫХ ФУНКЦИЙ ДВУНАПРАВЛЕННОГО РАСПРЕДЕЛЕНИЯ ОТРАЖАТЕЛЬНОЙ СПОСОБНОСТИ | 2015 |
|
RU2684480C2 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ЗАГОТОВКИ | 2009 |
|
RU2521776C2 |
| УПРАВЛЕНИЕ МНОГОСЕКЦИОННОЙ МАШИНОЙ | 2002 |
|
RU2285671C2 |
Изобретения относятся к обработке материалов давлением и могут быть использованы в линиях прессования, которые содержат множество расположенных на заданном расстоянии прессов. Устройство перемещения заготовки между прессами содержит устройство управления перемещением на основании результирующего целевого значения. Указанное значение получено с учетом положения матрицы пресса, расположенного выше по потоку в направлении перемещения заготовки, и положения матрицы пресса, расположенного ниже по потоку. Устройство управления устанавливает полученное результирующее целевое значение с обеспечением плавного перемещения устройства захвата заготовки. В результате обеспечивается снижение вибраций в устройстве перемещения заготовки без увеличения его механической жесткости. 3 н. и 5 з.п. ф-лы, 10 ил.
1. Устройство перемещения заготовки, выполненное с возможностью захвата заготовки посредством устройства захвата и перемещения между прессами, каждый из которых выполнен с возможностью приведения в движение матрицы, отличающееся тем, что оно содержит устройство управления перемещением для управления положением устройства захвата заготовки на основании результирующего целевого значения, учитывающего положение матрицы пресса, расположенного на стороне выше по потоку в направлении перемещения заготовки, и положение матрицы пресса, расположенного на стороне ниже по потоку в направлении перемещения заготовки, при этом упомянутое устройство управления перемещением выполнено с возможностью использования полученного результирующего целевого значения для обеспечения плавного перемещения устройства захвата заготовки.
2. Устройство по п.1, отличающееся тем, что положение матрицы пресса, расположенного на стороне выше по потоку в направлении перемещения заготовки, определяют с помощью угла θu упомянутого пресса, расположенного на стороне выше по потоку, положение матрицы пресса, расположенного на стороне ниже по потоку в направлении перемещения заготовки, определяют с помощью угла θd пресса, расположенного на стороне ниже по потоку, а устройство управления перемещением выполнено с возможностью использования результирующего целевого значения в виде результирующего целевого угла θr, полученного из следующего уравнения:
θr=W·θu+(1-W)·(θd+Δθp),
где W - весовой коэффициент, изменяющийся от 0 до 1;
Δθp - угол сдвига фаз углов пресса.
3. Устройство по п.1, отличающееся тем, что положение матрицы пресса, расположенного на стороне выше по потоку в направлении перемещения заготовки, определяют с помощью угла θu упомянутого пресса, расположенного на стороне выше по потоку, положение матрицы пресса, расположенного на стороне ниже по потоку в направлении перемещения заготовки, определяют с помощью угла θd пресса, расположенного на стороне ниже по потоку, при этом устройство управления перемещением выполнено с возможностью получения первых координат Xu и Yu устройства захвата заготовки на основании упомянутого угла θu и вторых координат Xd и Yd устройства захвата заготовки на основании угла θu и использования полученного результирующего целевого значения в виде результирующих целевых координат Xr и Yr, которые получены из следующих уравнений:
Xr=W·Xu+(1-W)Xd,
Yr=W·Yu+(1-W)Yd,
где W - весовой коэффициент, изменяющийся от 0 до 1.
4. Устройство по п.2 или 3, отличающееся тем, что в качестве весового коэффициента использована уменьшающаяся непрерывная функция, принимающая угол θu пресса, расположенного на стороне выше по потоку в направлении перемещения заготовки, в качестве переменной.
5. Устройство по п.1, отличающееся тем, что положение матрицы пресса, расположенного на стороне выше по потоку в направлении перемещения заготовки, определяют с помощью угла θu упомянутого пресса, расположенного на стороне выше по потоку, положение матрицы пресса, расположенного на стороне ниже по потоку в направлении перемещения заготовки, определяют с помощью угла θd пресса, расположенного на стороне ниже по потоку, а устройство управления перемещением выполнено с возможностью установки результирующего целевого значения, которое получено на основании упомянутых углов θu и θd из таблицы с заранее установленными результирующими целевыми значениями, в которой углы θu и θd приняты переменными.
6. Устройство по п.1, отличающееся тем, что положение матрицы пресса, расположенного на стороне выше по потоку в направлении перемещения заготовки, определяют с помощью угла θu упомянутого пресса, расположенного на стороне выше по потоку, положение матрицы пресса, расположенного на стороне ниже по потоку в направлении перемещения заготовки, определяют с помощью угла θd пресса, расположенного на стороне ниже по потоку, при этом устройство управления перемещением выполнено с возможностью получения первых координат Xu и Yu устройства захвата в виде расчетных величин, вычисленных на основании упомянутого угла θu пресса, вторых координат Xd и Yd в виде расчетных величин, вычисленных на основании угла θd пресса, и установки результирующего целевого значения, которое получено на основании вычисленных расчетных величин из таблицы с заранее установленными результирующими целевыми значениями, в которой первые координаты Хu и Yu и вторые координаты Xd и Yd приняты переменными.
7. Способ управления устройством перемещения заготовки по любому из пп.1-6, выполненным с возможностью захвата заготовки посредством устройства захвата и перемещения между прессами, каждый из которых выполнен с возможностью приведения в движение матрицы, отличающийся тем, что он включает этап управления положением устройства захвата заготовки на основании результирующего целевого значения, которое получают с учетом положения матрицы пресса, расположенного на стороне выше по потоку в направлении перемещения заготовки, и положения матрицы пресса, расположенного на стороне ниже по потоку в направлении перемещения заготовки, при этом на упомянутом этапе управления положением устройства захвата заготовки результирующее целевое значение устанавливают из условия обеспечения плавного перемещения устройства захвата заготовки.
8. Линия прессования, содержащая множество расположенных на заданных расстояниях прессов, каждый из которых выполнен с возможностью приведения в движение матрицы, и устройство перемещения заготовки между прессами, отличающаяся тем, что устройство перемещения заготовки между прессами выполнено по любому из пп.1-6 и размещено между прессом, расположенным на стороне выше по потоку в направлении перемещения заготовки и прессом, расположенным на стороне ниже по потоку в направлении перемещения заготовки.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1996 |
|
RU2116855C1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |

