1
Изсбретен;:е :.:сается способа регулирсвкн коптактзых И2;;спт5:й хонтпкп:г;х электромагнитного реле- солср кашзго геподвижные коктзкть подвижные коггтактные , закрегчленкыо oflj-iHM KCiniGM, я устрсйг;тза ;шя его ocyiuaствленяя.
Известно, что контактные 1 лЖПТия КОКТЗКТЯЫХ
пружин элект 1огчагннткьтх реле кеобхоллма регулировать тзсям oijpanoM, чтобы оки isc сьшп гленьare .л;-пг;1мллько лопусгимсго контлкткого пгкаТг1я, что имгот зьзчен.че йля кпде пюстн срабатыЕан я контактов, к иг презышзлт максимально допустимого когтактяого ,4To вя.-гзю для фу1.:кило}П р05;1Ния реле.
Пеизоежные .допуски при язготоплеГпш и колебвтгл сзоГгств материала котгтакт; ых электромагнитных реле вызывлгот зиашгтсяыгый разброс нажатя; изготоилст{ого эпектромагпитиого реле. ILiH ТОГУ, чтобм такого ройа эле}чТромагпнтное реле при соСлюцснк(( .г/Гпнилсшььо допустимого KCTiT.iKTiioro нажатия без последующеГг peryjiiTpoBKH контакт ой сггетемы в любом случае надежно фупкшюапровпло, кеобхоцкм выбор размеров .(10г;:1 мемскта с за пасом, что требует повышенных материальных затрат для изготовления мягниткон цепп и оомотKii.
Для каждого электромагкиткого реле необходимо согласозаиие контакттюй системы с прнвощгым элементом посредством регул фовки. контактных нажатий, что требует больш1{х затрат времеци.
Иззсстск способ регултгроБки коктакт1;ых нзжатяй контактных пружш реле, содержгщего неподвжк ые контакты и подвижные контакггме пружины, закрепленные одн}ш концо.м и выполненные тзк, что перед сборкой реле они имеют -f-iZcioK предварительно напряженного изгмба, и для каждой контактной пружинь; величина коггтактного нажатия превышает минимально допустимое контактное нажатие, кзмерг пгг измср5 тельт;Ь М зондом вел сч1п-1ы, проггорднональной фактическому контактному нажатию, сравкени-Л с величиной, пропорщюнальнон заданному контактиому наясатпю и определенш их разности Ilj.
Недостаток такого способа состоит в том, что контактные в собранном состоянии реле не допускают регул1фова 1ия. При регупироиа НИИ нескольких расположенных в одной гшоскости подвижных контактоых пружин воздействие гибочного пуансона является критическим с механической точки зрения. После сборки элек- 5 тромагнитиого реле ешс действенны допуски неподвижных контактов. В результате необходимы большие пределы допусков контактного нажатия, что противодействует оптимальному согласованию контактной системы с привод11ым элементом. Ю
Целью изобретения является обеспечение возможности aвтoмaтизaш и регулировки и повышерие зкономичностй реле. ,
Это достигается тем, что по предложенному способу контактное нажатие подв}{жной кон- 5 тактной пружины устанавливают на велиЧ1шу, которая по-прежнему превышает величину мини- . мально допустимого контактного нажатия, поqзeдcтвoм.вoзлefIcтвия гибочным пуансоном на подвижную контактную пружину на участке пред- 20 варительно напряженного изгиба. Гибочный пуансон перемещают в направлении у шстка гтредварительно напряженного изгиба подвижной контактной пружшты вплоть до соприкосновения с ним, после чего перемешают далее на определенный 25 эмпирически ушсток пути, необходимый для преодоления упругости подвижных контактных нруЖ1Ш и затем для получения остаточной деформации подвижной контактной перемешают на такой участок пути движеняя, который 30 пропорционален разностной велшшне, полученной из величин измеретшого фактического контактного нажатия и заданного контактного нажатия. После этого запоминают вел г-1ину установки гибочного пуансона, гибочный пуансон отводят .з5 и измеряют величину фактигеского контактного нажатяя. При недостижении заданного контакт- ..,, ного нхкатпя гибочпьп пуансон с .чой установочной величинойBiiOBb перемещают в Направлении участка предварительно напряженного 40 изгиба подвижной контакпюй . Гибочный пуансон дополнительно перемещают далее на такой участок пути, который пропорционален разностной величине, полученной из величин вновь измеренного фактического контактного нажатия 45 и заданного контактного нажатия.
С помощью пусковой кнопки элемента управления измерением запускается двигатель измерительного зонда и зонд для измерения нажатия при этом так долго перемещается в направлении §0 свободного конца предварительно напряженной посредством изгиба подвижной конгактаой пружины, пока путем размыкапил размыка ошего контакта через элемент управления измерением не отключается двигатель измерительного зонда 55 и не останавливается измерительный зонд. В этот момент в аналоговой форме пропорщюналь(Ная контактног.у нажатию измеренная величина принимается преобразователем гзмеряемой величины и преобразуется в цифровую форму. Преобразователь измеряемой величины через элемент управленм измерением возвращает измерительный зонд для измерения нажатия в исходное положение и оценивает - является ли величина контактного нажатия ниже величвды минимально допустимого контактного нажатия, находится ли контактное нажатие ,в допустимых пределах, контактное нажатие выше максимально допустимого.
В последнем случае установка контактного нажатия подвижной контактной пружины производится таким образом, чтобы, с одной стороны, от преобразователя измеряемой величины управлялся элемент згправления изгибом, который через двигатель гибочного пуансона перемещает гибоч1шш пуансон в направлении участка предварительно напряженного изгиба подвижной контактной пру:кшп 1 до тех пор, пока при юс соприкосновении через элемент управления изги,бом не будет осуществлено отключение двигателя гибочного пуансона и остановка гибочного пуансона. С другой стороны, в поспедующей схеме сравнения осуществляется сравнение величины оцифрованного фактического коьггактного нажатия с величиной заданного контактного нажатия запоминающего устройства для заданной веЛ1ГЧИНЫ.
Разностная велич1ша вводится в запоминающее устройство длл измеренной вел1яины, посредством которого управляемый датчиком тактовых импульсов датчик времени через элемент управления изгибом включает на определенное время двигатель гибочного пуансона, и гибочный пуансон перемщается далее в направлении участка предварительно напряженного изгиба подвижной контактной пружииы. Время включения двигателя гибочного пуансона пропори1юнал,но введенной в элемент запоминания измеренной . величины разностной величине и при первой гибке каждой подвижной ко тактной для преодоления эластичной области ПОД2ИЖНОЙ контактной пружины увеличивается на постоянную величину.
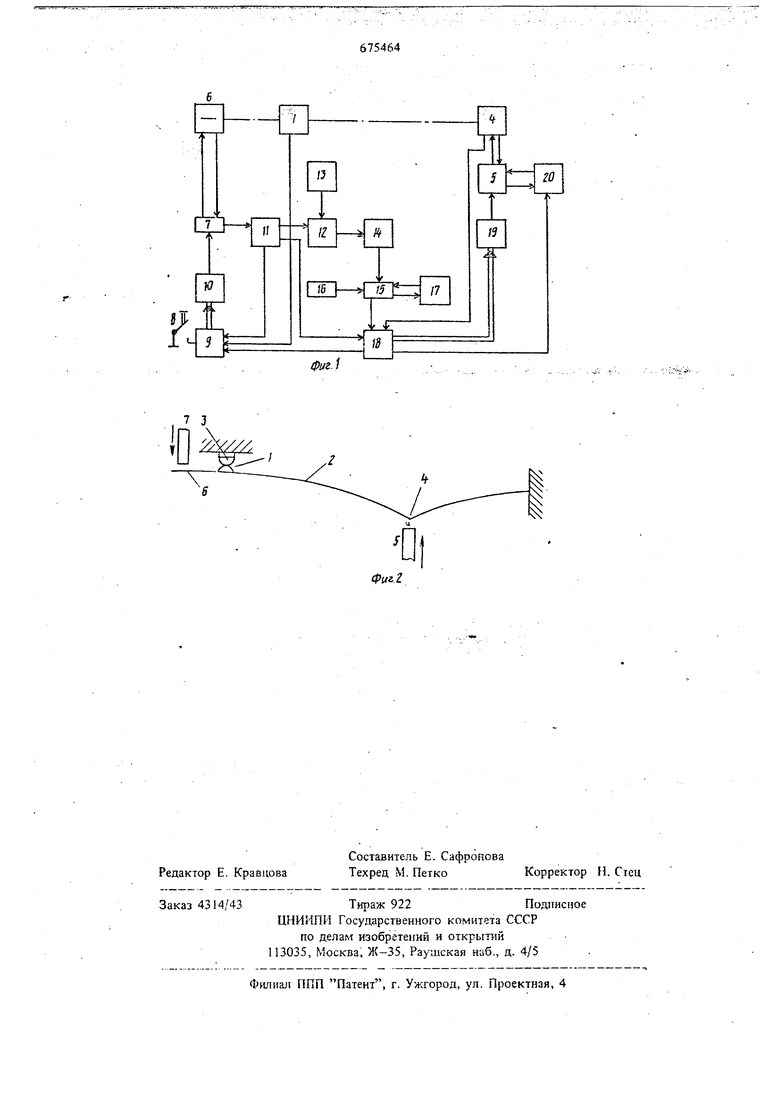
Это реализуется посредством предварительной установки датчика Времени, посредстворл щагового счетчика гибки. После отключения двигателя гибочного-пуансона через участок управления изгибом гибочный пуансон от ходит от участка предварительно напряженного изгиба подвижной контактной пружины, при этом установочная величина запоминается. Непосредственно после этого от элемента ущтавления изгибом через элемент управления измерением возбуждается новый процесс измерения контактного нажатия размыкающего контакта и, при недостижении контактного нзтажия в желаемых пределах, новый npouect изгибания. Теперь от преобразователя измеряемой величиюз через элемент управления изгибом управляется механизм запоминания изгиба, и гибочнын nyaiicoFi перемешается в конечное положение прежнего изгиба в направлении у-частка предварительно напряженного иэгиба подвижной коитактной пружины. Гибочный пуансон дополнительно перемещается далее на участок пути, пропорциональный разностной величине, полученной из величины вновь измеренного факти шского контактного нажатия и заданного контактного нажатия. После запоминания этой новой разностной величины в элементе запоминания измеренной величины осуществляется следующий изгиб посредством гибочного пуансона рассмотренным способом. После оценки и достижен 1Я контактного нажатия в желаемых пределах регулировочный процесс прерывается. Электрическая схема устройства для регулирования контактного нажатия подвижных контактных пружин содержит пусковой элемент, к которому последовательно присоединен элемент управ ления измерением, двигатель измерительного зонда и измерительный зонд для измерения контактных нажатий, установлеиньш .с возможностью вза имодействия со свобод11ым концом подвижной контактной пружины, преобразователь измеряемо величины, установленной с возможностью присое динения к измерительному зонду для измерения контактных нажатий, и размыкающий контакт, соединенный с элементом управления измерением. Причем преобразователь измеряемой величины также присоединен непосредственно и через схему с{5авнения, соедяненнуго с элементом запоминания заданной величины, элементом запоминания измеряемой величины и датчик времени, в свою очередь, соединенгтый с дагшком тактовых импул сов и шаговым счетчиком гибки, к элементу управления изгибом, присоединенному через двигатель гибочного пуансона к гибочному пуансону, установленному с позможиостыо воздействия на , участок предварительно напряже 1ного изгиба под вижной контактной пружины, имеющий возможность соединения с злеме1 том управления изгибом, который также присоединен через механизм запоминания изгиба к гибочному пуансону. На фиг. 1 представлена cTpyKTypiian схема уст ройства для осуществления предложенного способа; на фиг. 2 - схема возде 1ствия гибочного и мерительный зонд для измерения контактного нажат Размыкающий контакт 1 состоит из закрепленной с одной стороны подвижной ко 1тактной пружины 2 и неподвижного контакта 3. На участке 4 предварительно напряженного изгиба подвижной контактной пружины 2 находится точка взаимодействия с гибочным пуансоном 5. Свободный конец 6 подвижной контактной пружины 2 взаимодействует с измеритс.(ым зондом 7 для измерения нажатия. К пусковому эле.менту 8 (кнопка) последовательно подсоединены элемент 9 управления измерением, двигатель 10 измерительного зонда и измерительный , 7 для изерения нажатия. Измерительный зонд 7 лдя изерения нажатий соединен со СБобош1ым конном подвижной контактной пружины 2. Измерительный зонд 7 лпя измерения нажатия зонд 7 через реобразователь 11 измеряемой величины, схему сравнения 12, которой соответствует элемент запоминания 13 заданной величины, элемент запоминания 14 измеренной величины и датчик времени 15, соединенный с датчиком тактовых имульсов 16 и шаговым счетчиком гибки 17, приоединен к элементу 18 управления изгибом. От преобразователя 11 измеряемой величины, размыкаюшего контакта 1 и элемента 18 управления згибом, имеется соединение с элементом управления измерением 9. Преобразователь 11 измеряемой величины соединен j элементом 18 управления изгибом. К этому элеме гту последовательно подсоединен двигатель 19 гибочного пуансона и гибочный пуансон 5, соединенный с ушстком 4 предварительно напряженного изгиба подвижной контактной пружины 2. Участок 4 предварительно напряженного изгиба подвижной контактной пружины 2 соединен с элементом 18 упрапления изгибом. Последний соединен далее через механизм запоминания изгиба 20 с гибочным пуансоном 5. Для осуществления предложенного способа отдельные закрепленные с одной стороны подвижные контактные пружины 2 перед сборкой предусматриваются с участком предварительно напряженного изгиба 4 таким .бразом, чтобы при наличии всех 1еблагоприятных допусков изготовления и материалов обеспечивалось минимальич допустимое контактноена:-катие. Для регулирования контактных нажатий подвижные кс нтактные пружины 2 должны взаимодействовать с неподвижными контактами или, соответственно, ке)нтактными пружинам , в которых контакты прилегают к неподвижной опоре или с неподвижным определенным упором.: Гибочный пуансон 5 яetк;мёщaeтcя в направлений участка предварительно напряженного изгиба 4 вплоть до соприкосновения с; подвижной контактной пружиной 2 и далее на определенную эмпирически величину для преодоления эластйчной области подвижной контактной пружины 2. При ЭТОМ подвижная контактная пружина 2 своим контактом соприкасается с неподвижным контактом 3. Определенная с помощью измерительного зонда 7 для измерения нажатия величина, например измеренный ToV или напряжение,„которые пропорциональны фактическому кинтакттгому нажатию, сравнивается с прогюрщюнальной заданному контактному нажатию величи гой, в результате чего образуется разностная величина. Для получения остаточной пластической деформации модвижной контактной пружш1ы 2 гибочный пузксо 5 перемещается дальше на пропорщюнальный раз ностной велотине участок пути относительно начального места положения участка предварительн напряженного изгиба 4 подвижной контактной пружины 2, Посредством этого подвижная контактная пружина 2 изгибается, при этом величи}са фактического контактного нажатия приближа ется к заданному нажатяга или достигает его. Последняя установочная гибочного пуансона 5 запомгшается меха1пнес5 и, например посредством фиксирования. Ilocjie этого отводят гибочный пуансон 5 н измеряют новое факттес,кое контактзюе нажатие подзнжнон контактной пружины 2. Если не достигнуто заданное контактное нажатие, подводят гибочный пуансон 5 иотноснтельяо ранее запо1 1 шавшейся установки перемещают его дополнительно дальше на шсток пути, пропорциональный разност1 ой вел}пине, образованной из величин вновь измеренного фактического контактного нажатия и заданного контак тного нажатия. Если же опять не будет достгггнуто требуемое контактное нажатие, последн й рабочий шаг циклично повторяется. В электрической схеме предусмотренные с участками предварительно напряженного изгиба 4 подвижные контактные пружины 2 жестко смон тированы в электромагнитном реле. Их контактный зпемент давит при этом на неподвижный -контакт 3, в соответствии с предварительным напряжением подвижных контактт ых пружин 2. При этом несколько эпк лодви:т 1гььх контактных пружин 2 может быть расположс-но с соответствующими неподвяжъыми контактами 3 в одной плоскости электромагнитного реле в ка.честве раз.мыкаюшкх и/Чши персключагоших контактов. Электромагнитное роле механически жестко закреплено в опоре, одновременно имеет место электрическое соед}шеиие каждого размыкающего контакта 1 с устройством для регулирования контактных нажатий подвшк -гых контакт1П)1х пружин 2. Для определения контактного аажатия подвижной контактной пружлиы 2 после призедения в действие пусковой кгюпки 8 включается устройство для регулирования контактных нажатий подвижных ко1 тактных пружин 1, и через элемент 9 управления измерением двигатель 10, перемещает измерительный зонд 7 для измерения нажатия, который работает совместно, например, с тензометрическ}1м преобразователем. При размыкании размыкающего контакта 1 через элемент 9 управления излтерением отключается двигатель 30 измерительного зонда, и измерительный зонд 7 для измерения нажатия останавливается, пол ченная в этот момент на измерительном зонде 7 величрша пр-опорщюнальиа ф.ктическому контактному на..Эта имеющаяся в аналоговой форме величина нр};нимается прсобразоватс1ем 11 измеряемой велотины. Последние чере шемент управления измерением 9 возвращает измерительный зовд 7 посредством двигателя 10 измерительного зонда в исходное положение. В преобразователе 11 измеряемой величины, например, с помощью порогового выключателя оценивается - находится ли контактное нажатие ниже вел1щины минимально допустимого контактного нажатля, в желаемых пределах выще минимально допустимого контактного нажатия или выше этих пределов. Если мш1имапьно допустимое контактное на:катке не достигнуто, осуществляется индикация погрещности. Индикация погрешности означает либо то, что образованный перед сборкой злектромагнитного реле участок 4 предварительно напряженного изгиба подвижной контактной пружины 2 не соответствует эмпир11чески полу енной величине, либо имеется контактная пружигга, в которой наблюдаются неолд1Ородности, возникшие за счет усадочных раковин, колеба1 ия по толщине исходного материала, лежащие выше допустимых пределов допусков., повреждения, пол ченные при штамповке или транспортировке. Эти погрешности подвижной контактной пружины 2 выявляются только в этой ступени способа и являются браком. Если же факттеское контактное нажатие уже находится в желаемых пределах выще минимально допустимого контактного нажатия, процесс регулировки не осуществляется и готовое отрегулированное электромагнитное реле выталкивается. Укладывание или выталкивание осуществляете. вручную или автоматически..., Если же велшгина фактического контактного нажатия вьше желаемых пределов, необходима регулировка контактного нажатия подвижной контактной пружины 2. В этом случае от преобразователя 11 измеряемой вел1минь через последовательно включенный элемент 18 правления изгибом, осуществляется подключение двигателя 19 гибошого пуансона, который перемещает ги6оч. пуансон 5 в направлении участка предварительно напряженного изгиба 4 подвижной контактной пружвды 2. Если гибочтгй пуансон 5 соприкасается с утастком предварительно напряжённого изгиба 4 подвижной контактной пружины 2, через залжнутую таким образом цепь тока отключается двигатель 19 гибочного пуансона через элемент IS управления изгибом. Далее цифровая величина фактического контактного нажатия из преобразователя 11 измеряемой величины сравнивается во включенной последовательно схеме сравнения 12 с ц фровой величиной заданного контакт1юго нажатия и поступает в эл емент 13 запоминания заданноГ велич ты, и разностная величтга подается и запоминается элементом 14 запоминания измеренной величины. Последовательно с элементом 14 загюмииашя измеренной величины соединен датчик времени 15, например, сдвигающий регистр, управляемый через датчик 16 тактовых имиульсов, который включает элемент 18 упраулення изгибом, пклюшгоииш двнгателл 19 гибочного пуансона, и перемещает далее гибочный пуансон 5 в определе}1ньп период, величина которого зависит от величины запомненного элемента 14 измеренной величины, направлении участка 4 предварительно напряженного изгиба 4 подвижной контактной пруж1шы 2. При зтом пройде шый гибоч1Ш1м пуансоном. 5 путь пропорционален времени подключения двигателя 19 гибочного пуансона. Время подключе-; кия двигателя 19 гибочного пуансона состоит из периодов; постоянного периода, в продолжении которого в подвижной контактной пружине 2 осуществляется только одна эластичная деформация, и переменного периода, в продолжении которого в подвижной контактной пру;кине 2 осуществляется остаточная деформа1П я. Постоянный период являе- ся полу ютпюй эмпирически для каждого типа подвк-лсньк ко гтактных пружин 2 велгетинон, которая введенной в шаговый счетчик 17 гибки, прелварительно уста 1авливает включенный дапик времени 15, однако только при перЕом шаге гибки каждой под вижной контактной гфужины 2. После отработки постоянного и переменного периодов отключается двигатель 19 гибочного пугнсона и гибочный пуанс5н 5 останавливается. Так как не исклю ен последующий изгиб подвижнон контактной 2 и пос.чедуюшее уменьшение истинного контактного нажатия, вплоть до желаемых пределов, может быть осуществлено только посредством последующего определенного движения гибочного пуансона направлении участка гГредварительно напряженного изгиба 4 подвижной контактной пружины 2, с остановкой гибочного пуансона 5 от элемента управления изгибом 18 включается механизм 20 запоминания изгиба. Последний, например, посред ством поворотного механизма, отводит гибочный пуансон 5 от з астка предварительно напряженно го изгиба 4 подвижной контактной пружины 2 и при этом запоминает установочную величину гибочного пуансона 5. После этого элемент 18 управления изгибом через Э1лемент ут1равле П я измерением 9 осуществляет новое измерение факTiwecKoro контактного нажатия. Если еще не дос тигнуты желаемые пределы заданного контактного нажатия, необходим следующий процесс гибки Преобразователь 11 измеряемой величины вклю чает эле.мент 18 управления изгиба, который в этом случае вместо двигателя 19 гибочного пуансона запускает механизм 20 запоминания изгиба и приводит гибочн)Й nyaFicou 5 в конечное поло жение предшествующего изгиба в направлении участка предварительно напряже шого изгиба 4 nosEHJiarofi контактной пр жииы 2. Далее ud включенной поспёдоБЗТельно с преобразователем измеряемой вёлшншы схеме сравнения 12-сравнивается новое факииеское контактное нажатие с заданным ко ггакт1гым нажатием, запЬмНеннымэлементом 13 запоминания задатшой велтины и разностная величина запоминается в элементе 14 запойШания измеренной величиньь Так как посредством механизма 20 запоминания изгиба гибочный пуансон 5 устанавливается в конеч юе положение предыдущего изгиба, двигзтель 19 гибочного пуансона должен быть включен еще только на время, соответствующее новой разности между фактическим контактным нажатпсм и заданным контактным нажатием. После этого вновь становится действенным механизм 20 запо.м1шания изгиба. Через элемент 12 управления изгибом посредством элемещ-а 9 управления измерением осуществляется новое измерение факт1 ческого контактного нажатия подвижной контактной пружины 2. Если еще не достигнуты желаемые пределы заданного конта тного нажаткя подвижной контактной пружины 2, необход{ 1 следуташш процесс язгтоа и измерения. В случае, например, срабатывают все триггеры преобразователя 11-измеряемой величины, осуществляется от-ключение и возврат всех функщтаимрующих блоков. Согласно этому принщ пу работы устройство для регулировки контактного нажатия подвижной контактной пружины 1 .ложет также осуществлять свое действие одновременно при наличии неско тьких управляемых независимо один от гибочных пуансонов 5. Если, например, у одного электромагнитного реле с четырьмя размыкающими или переключающими контактами имеется небольшое место для ощ овременного действия всех гибочных пуансонов 5 и измерительного зонда 7 для измерения нажатия, в гтервьгЛ рабочий ход осуществляется регулирование первой и третьей подвижт ой контактной пружины 2, а во второй рабочий ход посредством относительнот-бсмещения подвижных контактных пружин 2 к гибочным nyaiicoHOM 5 - регулирование второй и четвертой подвижной контактной 2, преимуществом предложенного способа и устройства соответственно изобретения его осуществления является простое и точное регулирование контактныхнажатий в электромагнитном реле. При этом обеспечивается то, что во избежа} ие допусков ко11такт1п ьх нажатий, которые проявляются при сборке имеющих допуски отдельных элементов электромагнитного реле, регул1фованяе осуществляется на смонтированном электромагнитном реле. Несмотря па наличие неблагоприятных допусков изготовления и материала
.обёйечивастся индивидуальная регулировка каждой отдельной подвижной контактной пружины 2 электромагнитного реле в небольших тфедва- . рительно заданных пределах выше минимально допустимого контактного на :атия при небольших производственных затратах.
Таким образом, достигается оптимальное согласование системы контактных пружин с приводным элементом. Это является сушественной предпосылкой для мнниатюризаш1и злектромагнитного реле и для снижения материальных затрат на магнитную цепь и обмотку при сохранении технических параметров элё1йтромагнитного реле. Формула изобретения 1 .Способ регулировки контактных гажатнй контактных пружин электромагнитного реле, содержащего неподвижные контакты и подвижные. конт;актные пружгты, закрепленные одним концом и выполненные так, что перед сборкой реле они имезот участок предварительно, напряженного изгиба, и для каждой подвижноГг контактной пружины величина контактного нажатия преаыша ет минимально допустимое ко} тактное нажатие, путем измерен5{я измерительным зондом зёличины, пропорциональной фактическому контактному нажатию, сравнения ее с зеличиной, пропор.циональной заданному контактному нажатию и определения их разности, отличающийся тем, что, с целью обеспечения возможности автоматизации регулировки и повышения экономичности реле, контактное кз;катие подвюкных контактных пружин устанавливают на величину, попрежнему превышающую М1шимально допустимое контактное нажатие, путем воздействия гибочнь М пуансоном на подвижную контактную пружину научастке .предварительно напряженного изгиба, при этом гибочный пуансон перемещают в направлении участка предварительно напряженного изгиба подвижной контактной прухсины до соприкосновения с ним, далее перемещают дальше на определенный эмпирически участок пути, необхо.димый дал преодолег(ия упругостиподвижной контактной пружины, и затем перемешают еще дальще для получения остаточной плас. тичной деформащш подвижной контактной пружины на участок пути, пропорциональный разности измеренного фактического и заданного контактного нажатия, запоминают установочнуй величину перемещения изгибочного пуансона, гибочный пуансон отводят и измеряют величину фак5 тического контактного яа катия, и в случае недостижения заданного контактного нажатия гибочный пуансон снова перемешают в направлении участка предварительного напряжения изгиба подвижной контактной пружины на запомненную установочную величину перемещения гибочного пуансона и дальше tsiL участок пути, пропорциональный разности вновь измеренного фактического контактного нажатия и заданного контактного нажатия, снова запоминают устанЬебчную величи}1у перемещения гибочного пуансона, отводят его и снова измеряют величину фактического контактного нажатия, причем процесс повторяют до достижения заданного контактного нажатия. 2. Устройство для осуществления способа по п. 1, содержащее пусковой элемент, к которому последовательно присоединен элемент управления измерением, двигатель измерительного зонда и измерительный зонд для измерения контактных -25 нажатии, установленный с возможностью взэимодействия со свободным концом подвижной контактной пружины, преобразователь измеряемой аеличикы, установленный с возможностью присоединения к измерительному зонду для измере30 кия контактных нажатий, и размыкающий контакт, соеди1ге5шыи с элементом управления измерением, причем преобразователь измеряемой велич1шы также присоединен непосредственно и через схему фавнен5И, соединенную с злементог г запоминания заданной величины, элементом запоминания измеряемой величины, и датчик времени, в свою очередь соединенный с датчиком тактовых импульсов и щаговым счетчиком гибки, а элементу управления изгибом, присоединенному через двигатель гибочного пуансона к гибочному пуансону. установленному с возможностью воздействия на участок предварительно напряженного изгиба подвижной контактной пружины, имеющий возможность соед}ше1шя с элементом управления изгибом, который также присоединен через мехайизм запоминания изгиба к гибочному пуансону Источники информации, принятые во внимание при экспертизе 1. Патент ГДР № I03S23, кл. 21 g 4/01, 1975.
фиг. /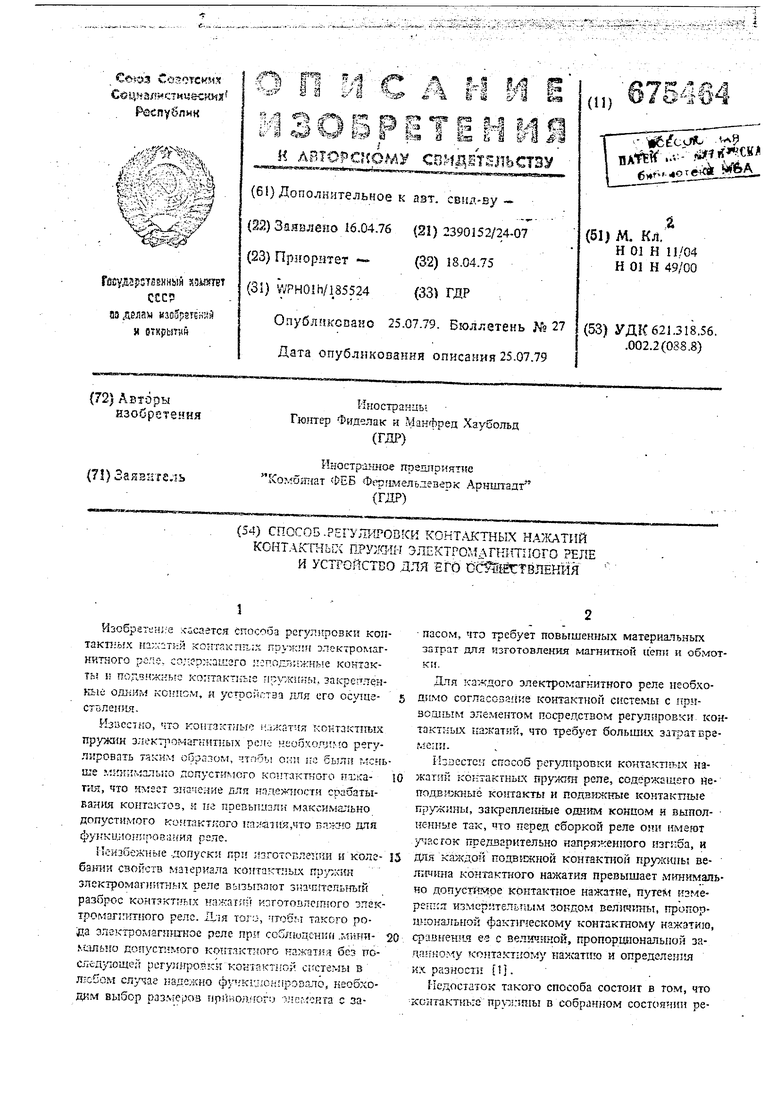

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения контактного нажатия электромагнитных реле | 1982 |
|
SU1129665A1 |
| Пресс для гибки заготовок с растяжением | 1982 |
|
SU1107927A1 |
| Способ регулирования контактного зазора переключающей контактной группы | 1976 |
|
SU708430A1 |
| Устройство для измерения контактной разности потенциалов | 1986 |
|
SU1362363A1 |
| РАСШИРЕННАЯ РЕГУЛИРОВКА ФОРМОВОЧНОГО ПРЕССА ТИПА JCO | 2019 |
|
RU2729480C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ УТЕЧКИ ТОКА НА КОРПУС ТРОЛЛЕЙБУСА | 1997 |
|
RU2128348C1 |
| Устройство контроля деформации заготовки при гибке профилей с растяжением | 1979 |
|
SU863068A1 |
| Способ измерения контактного нажатия размыкающего контакта электромагнитного нейтрального реле | 1990 |
|
SU1781725A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МЕТАЛЛИЧЕСКИХ ПАНЕЛЕЙ ДЛЯ БЕЗОПОРНОГО ЗДАНИЯ, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И МЕТАЛЛИЧЕСКОЕ ЗДАНИЕ, ИЗГОТОВЛЕННОЕ ЭТИМ СПОСОБОМ | 1993 |
|
RU2094152C1 |
| Способ гибки заготовок и устройство для его осуществления | 1988 |
|
SU1806031A3 |