Изобретение относится к системам пеленгации движущихся объектов на основе обработки радиотехнических или акустических (гидроакустических) сигналов, принимаемых
В известных способах [1-3] для обнаружения и нахождения пространственных координат движущихся объектов доплеровской станцией, посылающей зондирующие сигналы станцией с антенной решеткой (АР).и принимающей отраженные сигналы в нескольких элементах АР, сигналы подвергают первичной обработке в независимых приемных каналах. По результатам первичной обработки сигналы в цифровой форме в каждом элементе разрешения дальности переводят в спектр дискретным преобразованием Фурье (ДПФ). В полосе доплеровских частот выделяют те частоты, на которых амплитуды спектральных составляющих превышают порог обнаружения во всех Q приемных каналах (по числу приемных элементов АР). Далее спектральные составляющие обрабатывают моноимпульсным [1], амплитудным [2] или фазовым [3] методами. В последнем случае определяют фазы выделенных спектральных составляющих и по разности фаз находят координаты объектов, разрешенных по доплеровской частоте в элементах дальности. Во всех этих способах в каждом элементе дальности (число m таких элементов составляет сотни) дискретные выборки из n отсчетов сигналов (число n таких элементов также составляет сотни) подвергают ДПФ. Если принять за τ время формирования одного спектра, то при самом малом числе m=n=100 и Q=5 общее время частотного преобразования сигнала T=mnQτ составляет T=5⋅104 τ. Если сократить это время, например, в N=5 раз, то сохраненный резерв времени Т'=mnQτ(N-1)/N (в примере это Т=4⋅104 τ) можно направить на расширение функциональных возможностей станции.
Рассмотрим в качестве прототипа способ [3], который применительно к задаче обнаружения объектов и 5-элементной АР (Q=5) заключается в следующем.
1. Центры приемных элементов АР располагают в плоскости антенны OXY в точках с прямоугольными координатами центров (х1,у1)=(0,0), (х2,у2)=(а,0), (х3,у3)={0,а), (х4,у4)=(-b,0), (х5,у5)=(0,-b), а>0, b>0, несимметрично (для учета неоднозначности измерения фазы).
2. При данном положении линии визирования антенны станция посылает зондирующие сигналы, затем принимает отраженные сигналы в q-x приемных элемента АР  и обрабатывает их в аналитической (комплексной) форме
и обрабатывает их в аналитической (комплексной) форме  на заданном промежутке времени в q-x приемных каналах первичной обработки (число приемных каналов Q по числу элементов АР). При этом сигналы переводят с несущей частоты на промежуточную частоту, позволяющую выделять полосу частот с доплеровским смещением, зависящим от радиальной составляющей вектора скорости движения объекта.
на заданном промежутке времени в q-x приемных каналах первичной обработки (число приемных каналов Q по числу элементов АР). При этом сигналы переводят с несущей частоты на промежуточную частоту, позволяющую выделять полосу частот с доплеровским смещением, зависящим от радиальной составляющей вектора скорости движения объекта.
3. Сигналы селектируют в i-x элементах разрешения дальности Ri,  , по задержке времени прихода отраженного сигнала. В результате из выделяют i-е составляющие
, по задержке времени прихода отраженного сигнала. В результате из выделяют i-е составляющие  по числу элементов дальности m.
по числу элементов дальности m.
4. В каждом q-м канале  и в i-м элементе дальности ) со значением Ri сигналы преобразуют в дискретные временные последовательности
и в i-м элементе дальности ) со значением Ri сигналы преобразуют в дискретные временные последовательности  (n - число временных отсчетов сигнала).
(n - число временных отсчетов сигнала).
5. Последовательности , переводят в частотную область, подвергая их ДПФ. В результате получают частотные спектры в q-x каналах в полосе промежуточных частот, включающих смещение по доплеровской частоте:

6. В указанной полосе из n частот выбирают те k-Q частоты, на которых амплитуда сигнала  превышает порог обнаружения во всех q-x каналах
превышает порог обнаружения во всех q-x каналах  .
.
7. Для каждой k-й выбранной совокупности Q измерений  ,
,  , находят пространственные координаты k-го обнаруженного объекта, а именно:
, находят пространственные координаты k-го обнаруженного объекта, а именно:
7.1. Берут аргументы комплексных величин  - фазы
- фазы

7.2. Вычисляют разности фаз

7.3. Для полученных разностей фаз находят оценки прямоугольных координат объекта (в антенной системе координат) по формулам

где k=2π/λ, λ - длина волны.
7.4. Оценки прямоугольных координат пересчитывают в угловые координаты азимута и угла места  .
.
Замечание. В случае широкой диаграммы направленности антенны (ДНА) дополнительно в операциях п. 7.1, 7.2 применяют операции устранения неоднозначности измерения разности фаз.
Данный способ обладает недостатком - избыточным временем обработки сигналов Т=mnQτ из-за необходимости перехода в частотную область.
Предлагаемое техническое решение направлено на устранение этого недостатка, а именно на сокращение времени m в N раз и получение резерва времени T'=mnQτ(N-1)/N за счет обработки сигналов не в частотной, а во временной области.
Технический результат предлагаемого технического решения достигается применением способа измерения угловых координат движущихся объектов доплеровской станцией, который заключается в передаче зондирующих сигналов и приеме сигналов отражения в элементах антенной решетки, переводе сигналов в полосу промежуточных частот в приемных каналах первичной обработки, дискретизации сигналов по времени в каждом элементе разрешения дальности, выделении частоты сигналов, на которой амплитуды сигналов превышают порог обнаружения во всех приемных каналах и определении координат обнаруженных объектов фазовым методом, отличающийся тем, что, начиная с момента обнаружения сигналов от объекта, дискретные временные последовательности во всех каналах сглаживают с помощью трехступенчатого экспоненциального фильтра, рассчитанного на параболическую модель, фиксируют моменты времени перехода сглаженного гармонического сигнала через ноль и формируют последовательность оценок полупериодов, которые усредняют и определяют оценку частоты  , где Δq - оценка полупериода в q-м канале, после чего выбирают общую для всех каналов оценку частоты как медиану
, где Δq - оценка полупериода в q-м канале, после чего выбирают общую для всех каналов оценку частоты как медиану  , затем дискретные последовательности в q-x каналах подаются на фильтр Калмана, настроенный на гармоническую модель сглаженного сигнала с общей оценкой частоты
, затем дискретные последовательности в q-x каналах подаются на фильтр Калмана, настроенный на гармоническую модель сглаженного сигнала с общей оценкой частоты  , на выход которого поступают оценки амплитуд гармонических составляющих, затем через отношение оценок амплитуд вычисляют фазы сигналов в q-x каналах и фазовым методом находят оценки угловых координат объектов.
, на выход которого поступают оценки амплитуд гармонических составляющих, затем через отношение оценок амплитуд вычисляют фазы сигналов в q-x каналах и фазовым методом находят оценки угловых координат объектов.
Алгоритмически способ заключается в следующем.
1-4. Первые четыре операции совпадают с операциями способа прототипа.
5. В последовательностях  , выделяют действительную часть
, выделяют действительную часть  (Q - число каналов, символ i опущен).
(Q - число каналов, символ i опущен).
6. Определяют момент времени t0, начиная с которого амплитуды сигналов во всех Q каналах превышают порог обнаружения полезного сигнала.
7. Начиная с момента t0, в каждом q-м канале последовательность  сглаживают рекуррентно с помощью трехступенчатого экспоненциального фильтра, рассчитанного на параболическую модель xq(tj) в пределах эффективной памяти фильтра. Результатом является сглаженная последовательность
сглаживают рекуррентно с помощью трехступенчатого экспоненциального фильтра, рассчитанного на параболическую модель xq(tj) в пределах эффективной памяти фильтра. Результатом является сглаженная последовательность  во времени tj.
во времени tj.
8. Фиксируют момент времени перехода сглаженного гармонического сигнала через ноль в каждом q-м канале и формируют последовательность оценок полупериодов Δ1,Δ2,…,ΔN, на промежутке [t0,t1] присутствия полезного сигнала (до появления переотраженного сигнала), которые усредняют к моменту t1 и получают оценки  и соответственно оценки частоту
и соответственно оценки частоту  . Окончательная оценка частоты выбирается как медиана оценок
. Окончательная оценка частоты выбирается как медиана оценок  :
:

9. На следующем этапе обработки  , начиная с момента tk0, t0<tk0<t1, вычисляются оценки
, начиная с момента tk0, t0<tk0<t1, вычисляются оценки  фаз ψq в q-x каналах
фаз ψq в q-x каналах  с помощью фильтра Калмана, настроенного на модель сглаженного сигнала xq(tj) в каждом q-м канале вида
с помощью фильтра Калмана, настроенного на модель сглаженного сигнала xq(tj) в каждом q-м канале вида

где wq(tj) - ошибка фильтрации, дисперсия которой содержится в ковариационной матрице Rj, и вектор состояния  , подчиненный уравнению
, подчиненный уравнению
 .
.
При этом модель измерений принимает вид

Фильтр Калмана последовательно находит оценки  вектора Xk к моменту времени t1:
вектора Xk к моменту времени t1:
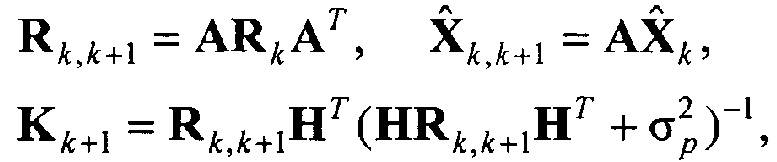
где k=k0,k0+1,k0+2,…,n1<n, Rk - ковариационная матрица ошибок оценивания, начальное значение которой R0 принимается равным единичной матрице; Rk,k+1 - экстраполированная ковариационная матрица ошибок оценивания с момента tk на tk+1;  - экстраполированный вектор состояния; Kk+1 - коэффициент усиления калмановского фильтра. Начальный вектор оценок
- экстраполированный вектор состояния; Kk+1 - коэффициент усиления калмановского фильтра. Начальный вектор оценок  принимается нулевым.
принимается нулевым.
10. На основании  вычисляют оценки фаз по формуле
вычисляют оценки фаз по формуле

или с учетом π в зависимости от знаков  .
.
11. Дальнейшую обработку фаз  , осуществляют в соответствии с пп. 7.2-7.4 прототипа.
, осуществляют в соответствии с пп. 7.2-7.4 прототипа.
Результаты моделирования
Моделировалось движение объекта в пространстве со скоростью 10-15 м/с по линейному закону в сторону приемника. Объект наблюдался в элементе разрешения дальности R=100 м в пределах ширины круговой ДНА ±30° (на уровне 0,5 мощности). Сигнал моделировался как квазинепрерывный гармонический комплексный сигнал в сантиметровом диапазоне длин волн, на промежуточной частоте fп=103, при шаге дискретизации Δt=ti+1-ti=1/(8fп) и параметрах АР a=3λ, b=0,5λ.
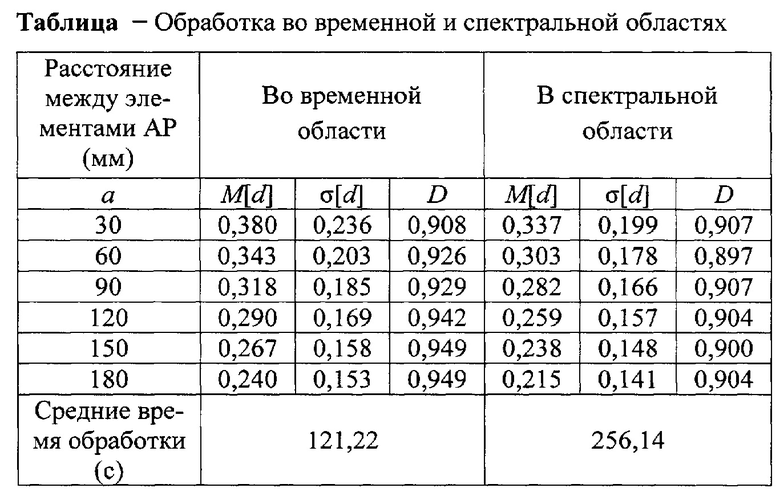
В таблице даны показатели, полученные при обработке во временной и спектральной областях в зависимости от значения точной базы а.
Определялись оценки среднего значения M[d], среднеквадратического отклонения (СКО) σ[d] случайной величины d, имеющей смысл расстояния между моделируемым и найденным положением объекта и распределенной по закону Максвелла, а также оценки вероятности обнаружения объекта D. Объект считался обнаруженным, если величина d не поревышала 3 м. Количество повторений опыта на множестве 5000 реализаций случайного шума  при отношении сигнал-шум 30 дБ, мультипликативного шума с СКО σγ=10-3. Шум измерения фазы в каждом канале
при отношении сигнал-шум 30 дБ, мультипликативного шума с СКО σγ=10-3. Шум измерения фазы в каждом канале  , где СКО
, где СКО  рассчитывался в соответствии с [4] как
рассчитывался в соответствии с [4] как  , где k - коэффициент, который при оптимальной обработке сигнала равен 1; q=Рс/Рш=E/N0 - отношение мощностей сигнала и шума на входе измерителя, что при q=30 дБ:
, где k - коэффициент, который при оптимальной обработке сигнала равен 1; q=Рс/Рш=E/N0 - отношение мощностей сигнала и шума на входе измерителя, что при q=30 дБ:  .
.
Заключение
Сравнительный анализ предложенного способа и способа прототипа, основанных на измерении доплеровского сдвига частоты и разности фаз соответственно во временной и частотной областях, показывает близкие результаты по точности оценок с небольшим преимуществом по вероятности 0,95 обнаружения объекта в предложенном способе, рассчитанном на обработку сигнала во временной области. При этом время обработки данных в алгоритме, реализующем предложенный способ, меньше в 2 раза, чем в алгоритме способа прототипа. Это позволяет быстрее и с большей вероятностью обнаруживать движущиеся объекты, разрешенные по дальности. Способ применим в существующих системах пеленгации движущихся объектов.
Литература
1. Патент RU 2534224 С1. Способ измерения координат элементов земной поверхности в бортовой четырехканальной доплеровской РЛС / В.К. Клочко, Ч.Т. Нгуен. Приоритет 25.04.2013. Опубл. 27.11.2014. Бюл. №33.
2. Патент RU 2569843. Способ формирования трехмерного изображения земной поверхности в бортовой доплеровской РЛС с линейной антенной решеткой / В.К. Клочко. Приоритет 25.11.2014. Опубл. 27.11.2015. Бюл. №33.
3. Патент RU 2572357. Способ формирования трехмерного изображения земной поверхности в бортовой четырехканальной доплеровской РЛС / В.К. Клочко. Приоритет 25.11.2014. Опубл. 10.01.16. Бюл. №1.
4. Бакулев П.А. Радиолокационные системы: учебник для вузов. М.: Радиотехника, 2007. 376 с.
Изобретение относится к системам пеленгации движущихся объектов на основе обработки радиотехнических или акустических (гидроакустических) сигналов, принимаемых антенной решеткой (АР). Техническим результатом является обеспечение сокращения времени обработки сигналов за счет обработки сигналов не в частотной, а во временной области. В отличие от прототипа, в котором угловые координаты движущихся объектов находятся фазовым методом путем выделения доплеровских частот объектов в спектрах промежуточной частоты нескольких измерительных каналов с последующим измерением фаз выделенных спектральных составляющих, в предложенном способе доплеровские частоты объектов выделяются во временной области при сглаживании сигналов по мере их поступления в измерительных каналах, а фазы также измеряются во временной области путем подачи поступающих сигналов на вход специально настроенного калмановского фильтра с учетом найденных частот, на выход которого подаются оценки фаз, что позволяет уменьшить время измерения фаз и нахождения угловых координат объектов в два раза. 1 табл.
Способ измерения угловых координат движущихся объектов доплеровской станцией, заключающийся в передаче зондирующих сигналов и приеме сигналов отражения в элементах антенной решетки, переводе сигналов в полосу промежуточных частот в приемных каналах первичной обработки, дискретизации сигналов по времени в каждом элементе разрешения дальности, выделении частоты сигналов, на которой амплитуды сигналов превышают порог обнаружения во всех приемных каналах, и определении координат обнаруженных объектов фазовым методом, отличающийся тем, что, начиная с момента обнаружения сигналов от объекта, дискретные временные последовательности во всех каналах сглаживают с помощью трехступенчатого экспоненциального фильтра, рассчитанного на параболическую модель, фиксируют моменты времени перехода сглаженного гармонического сигнала через ноль и формируют последовательность оценок полупериодов, которые усредняют и определяют оценку частоты  , где Δq - оценка полупериода в q-м канале, после чего выбирают общую для всех каналов оценку частоты как медиану
, где Δq - оценка полупериода в q-м канале, после чего выбирают общую для всех каналов оценку частоты как медиану  , затем дискретные последовательности в q-x каналах подаются на фильтр Калмана, настроенный на гармоническую модель сглаженного сигнала с общей оценкой частоты
, затем дискретные последовательности в q-x каналах подаются на фильтр Калмана, настроенный на гармоническую модель сглаженного сигнала с общей оценкой частоты  , на выход которого поступают оценки амплитуд гармонических составляющих, затем через отношение оценок амплитуд вычисляют фазы сигналов в q-x каналах и фазовым методом находят оценки угловых координат объектов.
, на выход которого поступают оценки амплитуд гармонических составляющих, затем через отношение оценок амплитуд вычисляют фазы сигналов в q-x каналах и фазовым методом находят оценки угловых координат объектов.
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ В БОРТОВОЙ ЧЕТЫРЕХКАНАЛЬНОЙ ДОПЛЕРОВСКОЙ РЛС | 2014 |
|
RU2572357C1 |
| СПОСОБ ОПЕРАТИВНО-ТЕХНИЧЕСКОЙ ОХРАНЫ ОБЪЕКТОВ И ГРАНИЦ | 2021 |
|
RU2768227C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ В БОРТОВОЙ ДОПЛЕРОВСКОЙ РЛС С ЛИНЕЙНОЙ АНТЕННОЙ РЕШЕТКОЙ | 2014 |
|
RU2569843C1 |
| EP 3739356 A1, 18.11.2020 | |||
| CN 110031882 A, 19.07.2019. | |||

