Изобретение относится к области радиотехники и может быть использовано для создания преднамеренных помех, в частности для искажения навигационного поля группе пользователей в заданном районе.
Известен передатчик помех, описанный в патенте на полезную модель RU 31891, опубликованный 27.08.2003, Бюл. №24, содержащий антенну, генератор опорной частоты, блок управления, канал формирования помехи содержащий синтезатор несущей частоты, генератор гармонической помехи, а также М каналов формирования помех, где М=2, 3, …, m, содержащих в каждом из М каналов синтезатор несущей частоты и последовательно соединенные генератор гармонической помехи, модулятор и усилитель, при этом, в первом канале выход генератора гармонической помехи подключен ко входу модулятора, выход которого соединен со входом усилителя, выход генератора опорной частоты подключен во всех каналах формирования помех ко входам синтезаторов несущих частот, выходы которых соединены с соответствующими вторыми входами модуляторов, (m+1) выходов блока управления подключены к соответствующим вторым входам синтезаторов несущих частот всех каналов формирования помех, (m+1) выходов усилителей соединены с соответствующими входами сумматора, выход которого подключен к антенне.
Недостатком известного устройства является создание преднамеренных радиопомех в заданном районе, при этом все навигационные приемники пользователей перестают получать навигационные сигналы от глобальных навигационных спутниковых систем (ГНСС). Это приводит к тому, что пользователи ГНСС в районе, где подавлены сигналы ГНСС, переходят на альтернативные способы ориентирования в пространстве.
Известно устройство обнаружения и радиопротиводействия применению беспилотных летательных аппаратов, описанный в патенте на полезную модель RU 223490, опубликованный 21.02.2024, Бюл. №6, содержащее корпус, пять генераторных узлов, соединенных через усилители мощности с соответствующей директорной антенной, блок питания, коллинеарную антенну, две направленные логопериодические антенны, радиоприемное устройство, устройство цифровой обработки сигналов, модуль хранения информации и модуль управления, при этом коллинеарная антенна и направленные логопериодические антенны соединены с соответствующими входами радиоприемного устройства, выходы которого соединены с советующими входами устройства цифровой обработки сигналов, выход которого соединен с модулем управления, модуль управления соединен с модулем хранения информации и с генераторными узлами, а блок питания соединен со всеми электропотребляющими элементами устройства.
Недостатком данного устройства является создание преднамеренных радиопомех в заданном районе, при этом все навигационные приемники пользователей ГНСС перестают получать навигационные сигналы от ГНСС в диапазонах 1200-1260 МГц и 1570-1610 МГц. Это приводит к тому, что пользователи в районе, где подавлены сигналы ГНСС, переходят на альтернативные способы ориентирования в пространстве.
Известно устройство создания преднамеренных помех, описанное в патенте на изобретение RU 2495527 С1, опубликованное 10.10.2013, Бюл. №28, содержащее приемный и предающий тракты, последовательно соединенные опорный генератор и усилитель, высокоскоростной компаратор, тракт расчета псевдопараметров орбитальной группировки, N трактов формирования сигналов космических аппаратов (КА), сумматор и цифроаналоговый преобразователь. Тракт расчета псевдопараметров орбитальной группировки снабжен установочной шиной, информационный вход и выходная шина синхронизации которого соединены соответственно с выходом приемного тракта и группой управляющих входов высокоскоростного компаратора. Выход блока соединен с входами синхронизации N трактов формирования сигналов КА, сумматора, цифроаналогового преобразователя и тракта расчета псевдопараметров орбитальной группировки, n-я группа информационных выходов которого, где n=1, 2, …, N, соединена с группой информационных входов n-го тракта формирования сигналов КА. Первая и вторая группы информационных выходов трактов соединены с соответствующими группами информационных входов сумматора. Первая и вторая группы информационных выходов блока подключены к соответствующим группам информационных входов цифроаналогового преобразователя, выход которого подключен к первому информационному входу передающего тракта. Второй информационный вход передающего тракта объединен с информационным входом приемного тракта, входом высокоскоростного компаратора и подключен к выходу усилителя, которое и выбрано в качества прототипа.
Известное устройство создания преднамеренных помех за счет расчета псевдопараметров орбитальной группировки и применения N трактов формирования сигналов КА, обеспечивает скрытое искажение навигационных параметров для радионавигаторов группы пользователей ГНСС, находящихся в пространственно ограниченном, но известном районе.
Однако недостатками данного технического решения является анализ навигационных сигналов в заданном районе только одной из ГНСС, например, ГЛОНАСС, GPS, Galileo или BeiDou. Кроме того, обеспечивается скрытое искажение навигационных параметров для радионавигаторов группы пользователей только одной ГНСС, при этом они могут получать в заданном районе не искаженные навигационные сигналы от других ГНСС.
Техническим результатом при использовании изобретения является повышение эффективности скрытого искажения навигационных параметров для радионавигаторов группы пользователей, использующих сигналы от разных ГНСС, находящихся в пространственно ограниченном, но известном районе.
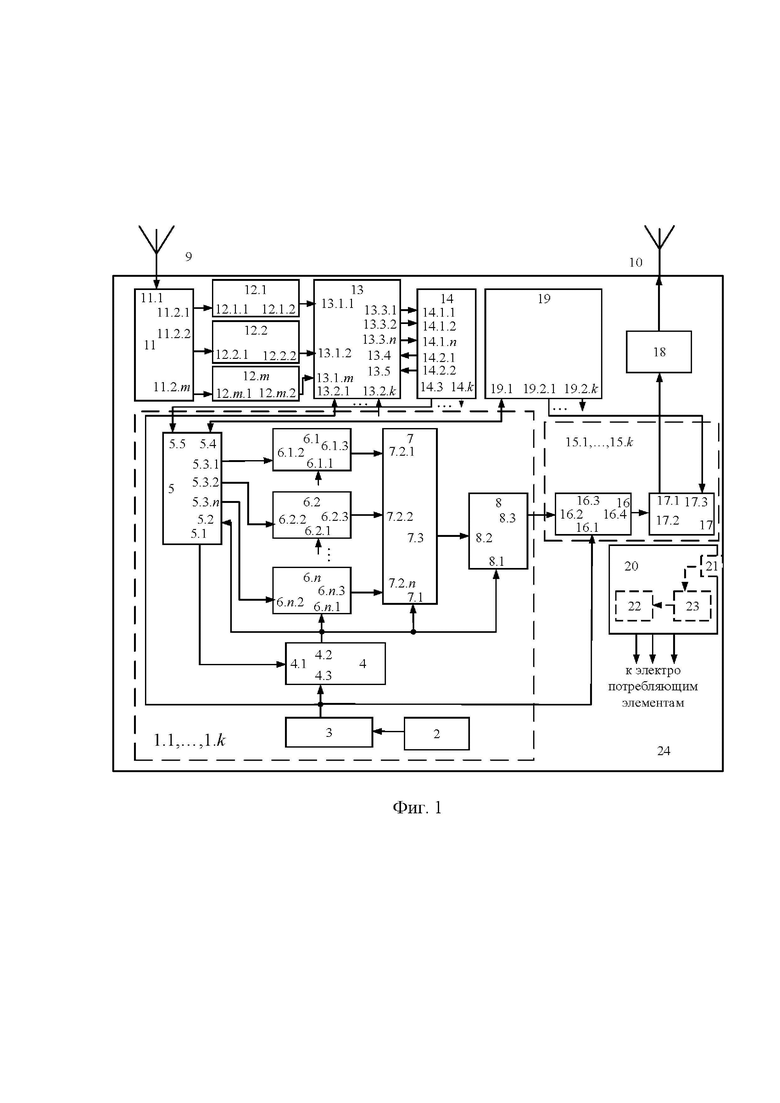
Указанный технический результат достигается за счет того, что устройство создания преднамеренных помех глобальным навигационным спутниковым системам, включающее K блоков искажения навигационных параметров 1.1, …, 1.k каждый из которых состоит из опорного генератора 2, усилителя 3, высокоскоростного компаратора 4, блока расчета псевдопараметров орбитальной группировки 5, N блоков формирования сигналов космических аппаратов 6.1, …, 6.n, сумматора 7, цифро-аналогового преобразователя 8, первый выход 5.1 блока расчета псевдопараметров орбитальной группировки 5 соединен с первым входом 4.1 высокоскоростного компаратора 4, выход 4.2 которого соединен с первыми входами 6.1.1, …, 6.n.1 N блоков формирования сигналов КА 6.1, …, 6.n, первым входом 7.1 сумматора 7, первым входом 8.1 цифро-аналогового преобразователя 8 и первым входом 5.2 блока расчета псевдопараметров орбитальной группировки 5, вторые выходы 5.3.1, …, 5.3.n которого соединены с вторыми входами 6.1.2, …, 6.n.2 N блоков формирования сигналов космических аппаратов 6.1, …, 6.n, выходы 6.1.3, …, 6.n.3 которых соединены с вторыми входами 7.2.1, …, 7.2.n сумматора 7, выход 7.3 которого соединен со вторым входом 8.2 цифро-аналогового преобразователя 8. В состав устройства дополнительно введены приемная 9 и передающая 10 антенны, радиочастотный преобразователь 11, М аналого-цифровых преобразователей 12.1, …, 12.m, многоканальный коррелятор 13, навигационный процессор 14, K передатчиков 15.1, …, 15.k, комбайнер 18, пульт управления 19 и блок питания 20. Каждый передатчик 15.1, …, 15.k состоит из преобразователя частоты 16 и усилителя 17. Выход приемной антенны 9 соединен с входом 11.1 радиочастотного преобразователя 11. Выходы 11.2.1, …, 11.2.m радиочастотного преобразователя 11 соединены с соответствующими входами 12.1.1, …, 12.m.1 аналого-цифровых преобразователей 12.1, …, 12.m, выходы которых 12.1.2, …, 12.m.2 соединены с соответствующими первыми входами 13.1.1, …, 13.1.m многоканального коррелятора 13. Выходы 13.3.1, …, 13.3.n многоканального коррелятора 13 соединены с соответствующими входами 14.1.1, …, 14.1.n навигационного процессора 14. Выходы 14.2.1 и 14.2.2 навигационного процессора 14 соединены с входами 13.4 и 13.5 многоканального коррелятора 13. Выходы 14.3, …, 14.k навигационного процессора 14 соединены с соответствующим вторым входом 5.5 блока расчета псевдопараметров орбитальной группировки 5 K-го блока искажения навигационных параметров 1.1, …, 1.k. Выход 8.3 цифро-аналогового преобразователя 8 каждого блока искажения навигационных параметров 1.1, …, 1.k соединен со вторым входом 16.2 преобразователя частоты 16 K-го передатчика 15.1, …, 15.k.Выход опорного генератора 2 в каждом из K блоков искажения навигационных параметров 1.1, …, 1.k соединен с входом усилителя 3, выход которого соединен с первым входом 16.1 преобразователя частоты 16, с соответствующим вторым входом 13.2.1, …, 13.2.k многоканального коррелятора 13 и вторым входом 4.3 высокоскоростного компаратора 4. Выход 16.4 преобразователя частоты 16 соединен с входом 17.2 усилителя 17. Выход 17.1 усилителя 17 каждого K-го передатчика 15.1, …, 15.k соединен через комбайнер 18 с передающей антенной 10. Вход/выход 19.1 пульта управления 19 соединен с входом/выходом 5.4 блока расчета псевдопараметров орбитальной группировки 5 каждого из K-х блоков искажения навигационных параметров 1.1, …, 1.k. Выходы 19.2.1, …, 19.2.k пульта управления 19 соединены с соответствующими входами 17.3 усилителей 17 каждого K передатчика 15.1, …, 15А, а блок питания 20 соединен со всеми электропотребляющими элементами устройства.
Кроме того, пульт управления 19 выполнен в виде дисплея с тачскрином или в виде персональной ЭВМ (ПЭВМ) с программным обеспечением и с возможностью выноса на расстояние L (м) от устройства.
Кроме того, блок питания 20 включает разъем 21 для подключения к внешней сети электропитания, а также, по меньшей мере, одну аккумуляторную батарею 22 и преобразователь-стабилизатор питающего напряжения 23, установленные в корпусе 24 устройства.
Благодаря новой совокупности существенных признаков за счет введения приемной 9 и передающей 10 антенн, комбайнера 18, радиочастотного преобразователя 11, М аналого-цифровых преобразователей 12.1, …, 12.m, многоканального коррелятора 13, навигационного процессора 14, K блоков искажения навигационных параметров 1.1, …, 1.k и K передатчиков 15.1, …, 15.k обеспечивается прием навигационных сигналов от разных ГНСС и скрытое искажение навигационных параметров для радионавигаторов группы пользователей, использующих сигналы от разных ГНСС, находящихся в пространственно ограниченном, но известном районе.
Заявленное устройство поясняется чертежами:
фиг. 1 - структурная схема устройства создания преднамеренных помех глобальным навигационным спутниковым системам (ГНСС);
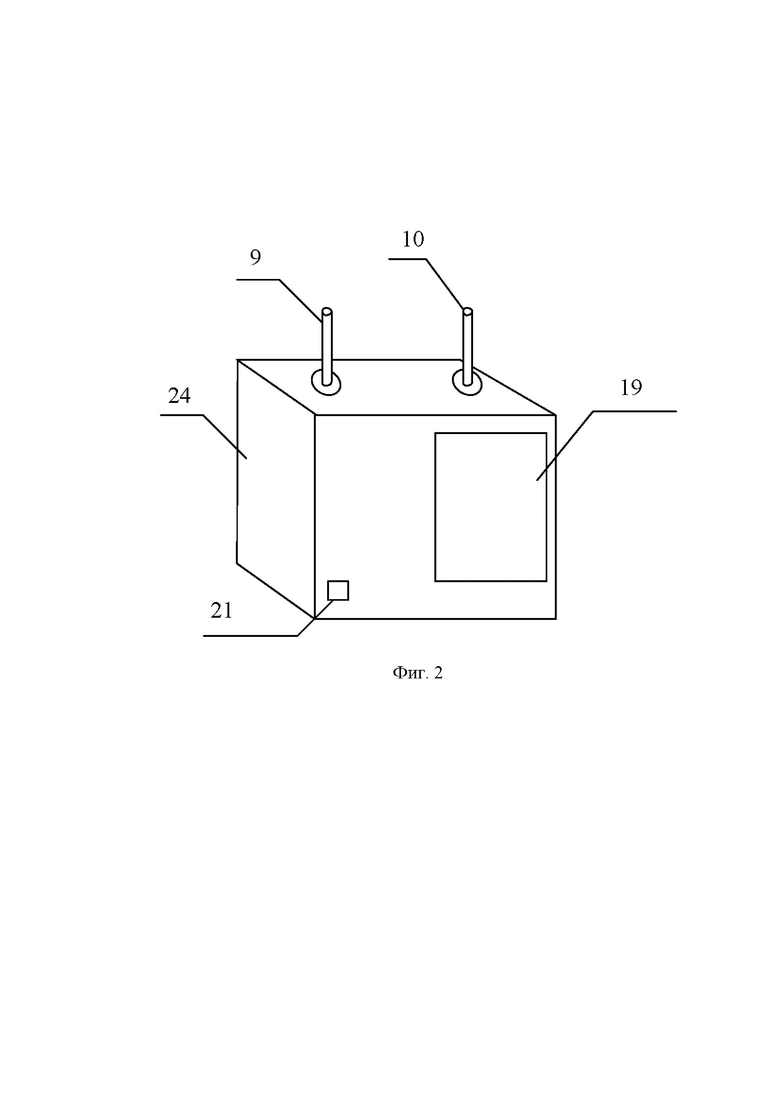
фиг. 2 - вариант конструктивного исполнения устройства создания преднамеренных помех ГНСС;
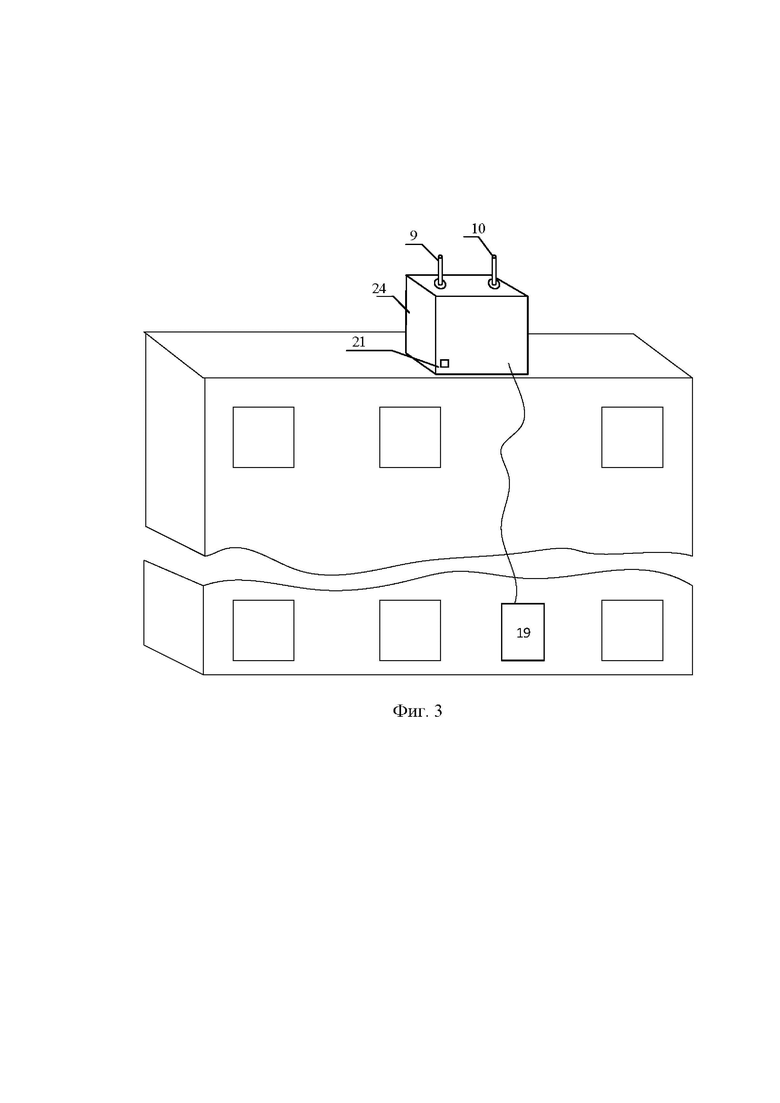
фиг. 3 - вариант реализации выносного пульта управления 19 в виде ПЭВМ с управлением по кабелю;
Конструктивные элементы устройства обозначены на фигурах следующими позициями:
1.1, …, 1.k - блоки искажения навигационных параметров;
2 - опорный генератор;
3 - усилитель;
4 - высокоскоростной компаратор;
5 - блок расчета псевдопараметров орбитальной группировки;
6.1, …, 6.N - блоки формирования сигналов космических аппаратов;
7 - сумматор;
8 - цифро-аналоговый преобразователь;
9 - приемная антенна;
10 - передающая антенна;
11 - радиочастотный преобразователь;
12.1, …, 12.m - аналого-цифровые преобразователи;
13 - многоканальный коррелятор;
14 - навигационный процессор;
15.1, …, 15.k - передатчики;
16 - преобразователь частоты;
17 - усилитель;
18 - комбайнер;
19 - пульт управления;
20 - блок питания;
21 - разъем для подключения к внешней сети электропитания;
22 - аккумуляторная батарея;
23 - преобразователь-стабилизатор питающего напряжения;
24 - корпус устройства создания преднамеренных помех ГНСС.
Заявленное устройство, показанное на фиг.1, содержит K блоков искажения навигационных параметров (1.1), …, (1.k), приемную (9) и передающую (10) антенны, радиочастотный преобразователь (11), М аналого-цифровых преобразователей (12.1), …, (12.m), многоканальный коррелятор (13), навигационный процессор (14), K передатчиков (15.1), …, (15.k), комбайнер (18), пульт управления (19) и блок питания (20).
Блок искажения навигационных параметров (1.k) включает в себя опорный генератор (2), усилитель (3), высокоскоростной компаратор (4), блок расчета псевдопараметров орбитальной группировки (5), N блоков формирования сигналов космических аппаратов (6.1), …, (6.n), сумматор (7), цифро-аналоговый преобразователь (8).
Передатчик (15.k) включает в себя преобразователь частоты (16) и усилитель (17).
Первый выход (5.1) блока расчета псевдопараметров орбитальной группировки (5) соединен с первым входом (4.1) высокоскоростного компаратора (4). Выход (4.2) высокоскоростного компаратора (4) соединен с первыми входами (6.1.1), …, (6.n.1) N блоков формирования сигналов КА (6.1), …, (6.n), первым входом (7.1) сумматора (7), первым входом (8.1) цифро-аналогового преобразователя (8) и первым входом (5.2) блока расчета псевдопараметров орбитальной группировки (5). Вторые выходы (5.3.1), …, (5.3.n) блока расчета псевдопараметров орбитальной группировки (5) соединены с вторыми входами (6.1.2), …, (6.n.2) N блоков формирования сигналов космических аппаратов (6.1), …, (6.n). Выходы (6.1.3), …, (6.n.3) блоков формирования сигналов космических аппаратов (6.1), …, (6.n) соединены с вторыми входами (7.2.1), …, (7.2.n) сумматора (7). Выход (7.3) сумматора (7) соединен со вторым входом (8.2) цифро-аналогового преобразователя (8). Выход приемной антенны (9) соединен с входом (11.1) радиочастотного преобразователя (11). Выходы (11.2.1), …, (11.2.m) радиочастотного преобразователя (11) соединены с соответствующими входами (12.1.1), …, (12.m.1) аналого-цифровых преобразователей (12.1), …, (12.m). Выходы (12.1.2), …, (12.m.2) аналого-цифровых преобразователей (12.1), …, (12./и) соединены с соответствующими первыми входами (13.1.1), …, (13.1.m) многоканального коррелятора (13). Выходы (13.3.1), …, (13.3.n) многоканального коррелятора (13) соединены с соответствующими входами (14.1.1), …, (14.1.n) навигационного процессора (14). Выходы (14.2.1) и (14.2.2) навигационного процессора (14) соединены с входами (13.4) и (13.5) многоканального коррелятора (13). Выходы (14.3), …, (14.k) навигационного процессора (14) соединены с соответствующим вторым входом (5.5) блока расчета псевдопараметров орбитальной группировки (5) K-го блока искажения навигационных параметров (1.1), …, (1.k). Выход (8.3) цифро-аналогового преобразователя (8) каждого блока искажения навигационных параметров (1.1), …, (1.k) соединен со вторым входом (16.2) преобразователя частоты (16) K-го передатчика (15.1), …, (15.k). Выход опорного генератора (2) в каждом из K блоков искажения навигационных параметров (1.1), …, (1.k) соединен с входом усилителя (3). Выход усилителя (3) соединен с первым входом (16.1) преобразователя частоты (16), с соответствующим вторым входом (13.2.1), …, (13.2.k) многоканального коррелятора (13) и вторым входом (4.3) высокоскоростного компаратора (4). Выход (16.4) преобразователя частоты (16) соединен с входом (17.2) усилителя (17). Выход (17.1) усилителя (17) каждого К-го передатчика (15.1), …, (15.k) соединен через комбайнер (18) с передающей антенной (10). Вход/выход (19.1) пульта управления (19) соединен с входом/выходом (5.4) блока расчета псевдопараметров орбитальной группировки (5) каждого из K-х блоков искажения навигационных параметров (1.1), …, (1.k). Выходы (19.2.1), …, (19.2.k) пульта управления (19) соединены с соответствующими входами (17.3) усилителей (17) каждого K передатчика (15.1), …, (15.k). Блок питания (20) соединен со всеми электропотребляющими элементами устройства.
Опорный генератор 2 предназначен для формирования сетки частот, используемых в устройстве (см. фиг. 1). Опорный генератор 2 может быть реализован в различных вариантах, схемы которых известны и приведены, например, в ГЛОНАСС. Модернизация и перспективы развития. Монография / Под ред. А.И. Петрова. - М.: Радиотехника, 2020. - 1072 с. стр. 324. Опорный генератор 2 может быть реализован на основе генератора ГК176-ТК (Морион).
Усилители 3 и 17 предназначены для усиления сигнала до требуемого уровня и могут быть реализованы на основе интегральных микросхем, схемы которых известны и приведены, например, Л.Ю. Астанин, В.И. Белицкий, В.Б. Краскин. Проектирование радиоэлектронных устройств на интегральных микросхемах. Под ред. С.Я. Шаца. М., «Сов. радио», 1976, 312 с. стр. 80-104. Усилитель передатчика 17 может быть реализован на базе известных микросхем, например, микросхеме типа QPA2237.
Высокоскоростной компаратор 4 предназначен для сравнения между собой двух значений напряжения или тока на входных клеммах с указанием большего из них, произведения расчета соотношения между ними и может быть реализован на основе высокоскоростного интегрального компаратора Attiny/Atmega 2313.
Блок расчета псевдопараметров орбитальной группировки 5 предназначен для приема имитационного задания от пульта управления 19, анализа информации по радиоэлектронной обстановки (РЭО) передаваемой от навигационного процессора 14 и вычисление необходимых задержек навигационных сообщений для всех работоспособных КА для конкретной ГНСС, например, GPS и могут быть реализованы на основе микропроцессоров, схемы которых известны и приведены, например, в Микропроцессорная техника: учебник / И. Н. Огородников. 2-е изд., перераб. и доп. Екатеринбург. УГТУ-УПИ, 2007. 380 с. стр. 65.
Блоки формирования сигналов космических аппаратов 6.1, …, 6.n предназначены для формирования требуемых полных навигационных сообщений. Каждый из блоков 6.1, …, 6.n настраивается на работу от имени определенного спутника, и по мере необходимости на его выходе формируют навигационные сообщения.
Сумматор 7 предназначен для объединения всех сформированных навигационных сообщений от блоков формирования сигналов космических аппаратов 6.1, …, 6.n в единый сигнал.
Блок расчета псевдопараметров орбитальной группировки 5, блоки формирования сигналов космических аппаратов 6.1, …, 6.n, сумматор 7 могут быть реализованы на процессоре цифровой обработки DSP TMS320c6455.
Цифро-аналоговый преобразователь 8 предназначен для преобразования цифрового сигнала в аналоговый суммарный помеховый сигнал.
Преобразователь частоты 16 предназначен для переноса аналогового суммарного помехового сигнала на требуемую несущую частоту, например, на частоту L1=1575,42 МГц.
Цифро-аналоговый преобразователь 8 и преобразователь частоты 16 могут быть реализованы на микросхемах, например, на микросхеме FPGA Virtex XC4SX35.
Приемная антенна 9 предназначена для приема радиосигналов от видимых КА ГНСС и может быть реализована на основе различных схем, которые известны и приведены, например, в Панченко Б.А., Нефедов Е.И. Микрополосковые антенны. М.: Радио и связь. 1986 г. Приемная антенна 9 может быть выполнена, например, в виде микрополосковой антенны с диаграммой направленности, обеспечивающую всенаправленный прием сигналов правосторонней круговой поляризации в верхней полусфере. Приемная антенна 9 может быть выполнена в одном модуле с предварительным усилителем/полосовым фильтром, который обеспечивает заданный коэффициент шума, ограничивает частотный спектр шумов и режекцию внеполосных помех, а также устройство защиты, малошумящий усилитель и полосовой фильтр (на фиг. 2, для того чтобы не загромождать чертеж, не обозначены) [ГЛОНАСС. Модернизация и перспективы развития. Монография / Под ред. А.И. Петрова. - М.: Радиотехника, 2020. - 1072 с. стр. 324. Стр. 299.]
Передающая 10 антенна предназначена для излучения радиосигналов с искаженными навигационными параметрами для радионавигаторов группы пользователей в заданном районе и может быть реализована на основе различных схем, которые известны и приведены, например, в Власенко В. И. Расчет и проектирование антенн и радиолиний: Учебное пособие. - СПб: ВАС, 2009. 272 с.
Радиочастотный преобразователь 11 предназначен для усиления принятых радиосигналов, фильтрации шумов и внеполосных помех и перенос сигналов на более низкую (промежуточную) частоту и может быть реализован на основе различных схем, которые известны и приведены, например, в ГЛОНАСС. Модернизация и перспективы развития. Монография / Под ред. А.И. Петрова. - М.: Радиотехника, 2020. - 1072 с. стр. 324. Стр. 299. Стр. 301. Радиочастотный преобразователь 11 имеет несколько радиочастотных трактов и, соответственно, несколько выходов, каждый из которых соответствует определенной навигационной системе и определенному частотному диапазону.
Аналого-цифровые преобразователи 12.1, …, 12.m предназначены для дискретизации полученных сигналов по времени их квантованию по уровню, кодирования и могут быть реализованы на основе различных схем, которые известны и приведены, например, в ГЛОНАСС. Модернизация и перспективы развития. Монография / Под ред. А.И. Петрова. - М.: Радиотехника, 2020. - 1072 с. стр. 324. Стр. 299. Стр. 303.
Многоканальный коррелятор 13 предназначен для извлечения навигационной и другой информации из принятых радиосигналов. Схемы многоканального коррелятора 13 известны и приведены, например, в патенте Fenton Р.С., Apparatus for and Method of Making Pulse-Shape measurements. US Pat. No. 8,467,433 B2, Jun. 18, 2013.
Навигационный процессор 14 предназначен для определения количества «видимых» в данный момент времени работоспособных КА для каждой ГНСС и их номера, определение значений эфемерид КА и альманаха, запись этих значений в энергонезависимой памяти. Альманах сохраняется до конца текущих суток (по международному времени) и при повторных включениях заявляемого устройства загружается из нее. Значения эфемерид обновляются по мере старения информации. В качестве навигационного процессора 14 могут быть использованы, например, различные микропроцессоры компании ARM Limited.
Комбайнер 18 предназначен для объединения нескольких передающих трактов от передатчиков 15.k на одну передающую антенну 10 и может быть реализован на основе различных схем, например, диплексера BS-900/1800/2100/2600 [сайт компании baltic-signal.ru].
Корпус 24 предназначен для размещения во внутренней полости электронных узлов (фиг. 2). Корпус 24 для надежности эксплуатации устройства, предпочтительно, выполнить влагозащитным. Сверху корпуса 24 установлены приемная 9 и передающая 10 антенны (фиг. 2). корпусе 24 также размещен блок питания устройства 20, который включает аккумуляторную батарею 22, а также, по меньшей мере, один преобразователь-стабилизатор питающего напряжения 23. В устройстве может быть применена литий-полимерная аккумуляторная батарея 22, собранная из 4, 5 или 6 ячеек с напряжением 3,7 Вольт каждая. Аккумуляторная батарея 22 расположена в отсеке корпуса 36. Импульсный преобразователь-стабилизатор питающего напряжения 23 обеспечивает стабильное напряжение питания всех электронных узлов устройства, независимо от снижающегося со временем напряжения на аккумуляторной батарее. Применение импульсных преобразователей-стабилизаторов 23 позволяет обеспечивать стабильным электропитанием усилителей мощности 3 и 17 при снижении напряжения на аккумуляторной батареи, что в ряде случаев может быть необходимым, особенно в случае применения усилителей с выходной мощностью 20 Вт и более. Заряд батареи 22 осуществляется либо на внешнем зарядном устройстве, либо посредством подключения внешнего источника электропитания через разъем 21. Каждая ячейка аккумуляторной батареи подключается к своему контакту, что позволяет осуществлять балансировку аккумуляторной батареи в процессе ее зарядки, а также проводить диагностику состояния аккумуляторной батареи на предмет обнаружения дефектных или преждевременно износившихся ячеек. Управление устройством осуществляется с пульта управления 19, который установлен с тыльной стороны корпуса 24 и выполнен либо в виде ПЭВМ с программным обеспечением, либо в виде дисплея с тачскрином. Для безопасности работы пульт управления 19 выполнен выносным на расстояние L (м) от устройства, например, устройство может быть установлено на крышу здания, а пульт управления 19, в виде ПЭВМ, можно разместить в безопасном месте, например, в подвале здания. ПЭВМ с программным обеспечением, может управлять устройством удаленно, через различные каналы связи.
Принцип работы устройства.
Пользователь подает электропитание на устройство. После включения питания электропитание подается на все элементы устройства в корпусе 24. Сигналы от КА ГНСС, принятые приемной антенной 9, подаются на радиочастотный преобразователь 11, который их усиливает, фильтрует и выполняет преобразование на более низкие частоты. Радиочастотный преобразователь 11 имеет несколько радиочастотных трактов и, соответственно, несколько выходов, каждый из которых соответствует определенной навигационной системе и определенному частотному диапазону. Выход каждого радиочастотного тракта преобразуется в цифровую форму в соответствующем аналого-цифровом преобразователе 12.1, …, 12.m и подается на вход многоканального коррелятора 13, содержащего несколько каналов корреляционной обработки навигационных сигналов. Сигналы с многоканального коррелятора 13 поступают в навигационный процессор 14, который их анализирует, выделяя скачки уровней синфазной и квадратурной компонент. По вычисленным значениям амплитуд и фаз отраженных сигналов навигационный процессор 14 рассчитывает поправки к измерениям задержки и фазы несущей и передает эти данные в блок расчета псевдопараметров орбитальной группировки 5. С пульта управления 19 вводят имитационное задание, которое включает в себя время начала и конца работы устройства и координаты, которые необходимо имитировать. Блок расчета псевдопараметров орбитальной группировки 5 на основе данных от навигационного процессора 14 осуществляет анализ РЭО: определяют количество «видимых» в данный момент времени работоспособных КА ГНСС и их номера, вычисляет необходимые задержки навигационных сообщений для всех работоспособных КА и формирует значения эфемерид КА и альманаха. Прием альманаха составляет 15 минут. Далее значения эфемерид и альманаха записываются в энергонезависимую память блока расчета псевдопараметров орбитальной группировки 5. При этом альманах сохраняется до конца текущих суток (по международному времени) и при повторных включениях заявляемого устройства загружается из нее. Значения эфемерид обновляются по мере старения информации. В случае обнаружения трех и более работоспособных КА блоки расчета псевдопараметров орбитальной группировки 5 в K блоков искажения навигационных параметров 1.1, …, 1.k совместно с блоками формирования сигналов космических аппаратов 6.1, …, 6.n приступают к формированию от их имени навигационных сообщений. С помощью опорного генератора 2 осуществляют синхронизацию внутреннего времени устройства со временем навигационной системы на блоках 5, 6.1, …, 6.n, 4 и 13. В результате с n' выходов блока расчета псевдопараметров орбитальной группировки 5 в K блоках искажения навигационных параметров 1.1, …, 1.k, где n' - текущее количество работоспособных КА, n'=3, 4, …, n, поступают соответствующие исходные данные (номер КА, требуемая задержка его сигналов, а также альманах и соответствующие значения эфемерид) каждому тракту формирования сигналов КА 6.1, …, 6.n'. На их основе блоками 6 формируют требуемые полные навигационные сообщения. Каждый из блоков 6 настраивается на работу от имени определенного спутника, и по мере необходимости на его выходе формируют навигационные сообщения. Для установки и корректировки задержек между сигналами спутников в блоках 6 введена обратная связь между сигналами имитируемого спутника и эталонным сигналом. В качестве последнего выступают сигналы опорного генератора 2 и быстродействующего компаратора 4, которые выполняют функцию единого стандарта времени в предлагаемом устройстве.
Сформированные блоками 6 навигационные сообщения поступают на соответствующие входы сумматора 7. В его функцию входит объединение всех сформированных навигационных сообщений, которые далее поступают на вход цифроаналогового преобразователя 8. Далее аналоговый суммарный помеховый сигнал следует на вход соответствующего преобразователя частоты 16 для переноса аналогового суммарного помехового сигнала на требуемую несущую частоту, например, на частоту L1=1575,42 МГц и затем на усилитель передатчика 17 для усиления сигнала до требуемого уровня и передачи через комбайнер 18 на передающую антенну 10 для излучения в эфир.
Работа устройство создания преднамеренных помех глобальным навигационным спутниковым системам может осуществляться от внешней сети электропитания подключаемой через разъем 21 и аккумуляторной батареи 22 установленной в корпусе 36 устройства (фиг. 2).
Пульт управления 19 может быть выполнен в виде дисплея с тачскрином, например, в виде дисплея Samsung AD81-09549А или может быть выполнен в виде персональной ЭВМ с программным обеспечением, а также выносным на расстояние L (м) от устройства. В случае реализации пульта управления 19 выносным на расстояние L (м) от устройства могут использоваться различные каналы связи, например, по кабелю или радиоканалу а также различная конструктивная его реализация, например в виде персональной ЭВМ (фиг. 3).
| название | год | авторы | номер документа |
|---|---|---|---|
| Приемник аппаратуры потребителей сигналов глобальных навигационных спутниковых систем, обеспечивающий обнаружение и блокирование ложных навигационных сигналов | 2024 |
|
RU2829323C1 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2013 |
|
RU2543078C1 |
| УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2013 |
|
RU2525299C1 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2012 |
|
RU2495527C1 |
| Способ обнаружения, оценки параметров и подавления имитационных помех и навигационный приемник с устройством обнаружения, оценки параметров и подавления имитационных помех | 2020 |
|
RU2737948C1 |
| Способ и устройство определения угловой ориентации летательных аппаратов | 2020 |
|
RU2740606C1 |
| Многочастотный приемник сигналов Глобальных Навигационных Спутниковых Систем | 2021 |
|
RU2787076C1 |
| Способ и устройство для обработки радионавигационных сигналов для атмосферного мониторинга | 2015 |
|
RU2680711C2 |
| Приемник аппаратуры потребителей сигналов глобальных спутниковых навигационных систем | 2017 |
|
RU2649879C1 |
| СПОСОБ ОЦЕНИВАНИЯ ФАЗЫ НАВИГАЦИОННОГО СИГНАЛА НА ФОНЕ МЕШАЮЩИХ ОТРАЖЕНИЙ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ И НАВИГАЦИОННЫЙ ПРИЕМНИК С УСТРОЙСТВОМ ПОДАВЛЕНИЯ МЕШАЮЩИХ ОТРАЖЕНИЙ ПРИ ОЦЕНКЕ ФАЗЫ | 2016 |
|
RU2625804C1 |
Изобретение относится к области радиотехники и может быть использовано для создания преднамеренных помех, в частности для искажения навигационного поля группе пользователей в заданном районе. Техническим результатом изобретения является повышение эффективности скрытого искажения навигационных параметров для радионавигаторов группы пользователей, использующих сигналы от разных глобальных навигационных спутниковых систем (ГНСС), находящихся в пространственно ограниченном, но известном районе. Устройство создания преднамеренных помех глобальным навигационным спутниковым системам включает в себя K блоков искажения навигационных параметров, K передатчиков, приемную и K передающих антенн, радиочастотный преобразователь, M аналого-цифровых преобразователей, многоканальный коррелятор, навигационный процессор и пульт управления. 4 з.п. ф-лы, 3 ил.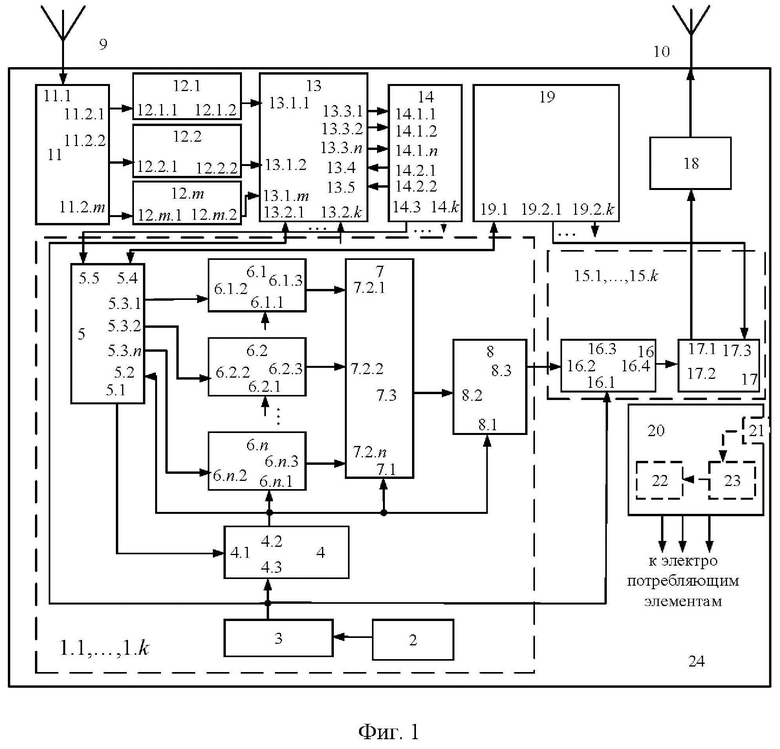
1. Устройство создания преднамеренных помех глобальным навигационным спутниковым системам, включающее K блоков искажения навигационных параметров (1.1),…,(1.k), каждый из которых состоит из опорного генератора (2), усилителя (3), высокоскоростного компаратора (4), блока расчета псевдопараметров орбитальной группировки (5), N блоков формирования сигналов космических аппаратов (6.1),...,(6.n), сумматора (7), цифроаналогового преобразователя (8), первый выход (5.1) блока расчета псевдопараметров орбитальной группировки (5) соединен с первым входом (4.1) высокоскоростного компаратора (4), выход (4.2) которого соединен с первыми входами (6.1.1),...,(6.n.1) N блоков формирования сигналов космических аппаратов (КА) (6.1),...,(6.n), первым входом (7.1) сумматора (7), первым входом (8.1) цифроаналогового преобразователя (8) и первым входом (5.2) блока расчета псевдопараметров орбитальной группировки (5), вторые выходы (5.3.1),...,(5.3.n) которого соединены со вторыми входами (6.1.2),...,(6.n.2) N блоков формирования сигналов космических аппаратов (6.1),...,(6.n), выходы (6.1.3),...,(6.n.3) которых соединены со вторыми входами (7.2.1),...,(7.2.n) сумматора (7), выход (7.3) которого соединен со вторым входом (8.2) цифроаналогового преобразователя (8), отличающееся тем, что в состав устройства дополнительно введены приемная (9) и передающая (10) антенны, радиочастотный преобразователь (11), M аналого-цифровых преобразователей (12.1),…,(12.m), многоканальный коррелятор (13), навигационный процессор (14), K передатчиков (15.1),…,(15.k), каждый из которых состоит из преобразователя частоты (16) и усилителя (17), комбайнер (18), пульт управления (19), блок питания (20), выход приемной антенны (9) соединен с входом (11.1) радиочастотного преобразователя (11), выходы которого (11.2.1),…,(11.2.m) соединены с соответствующими входами (12.1.1),…,(12.m.1) аналого-цифровых преобразователей (12.1),…,(12.m), выходы которых (12.1.2),…,(12.m.2) соединены с соответствующими первыми входами (13.1.1),…,(13.1.m) многоканального коррелятора (13), выходы (13.3.1),…,(13.3.n) которого соединены с соответствующими входами (14.1.1),…,(14.1.n) навигационного процессора (14), выходы (14.2.1) и (14.2.2) навигационного процессора (14) соединены с входами (13.4) и (13.5) многоканального коррелятора (13), выходы (14.3),…,(14.k) навигационного процессора (14) соединены с соответствующим вторым входом (5.5) блока расчета псевдопараметров орбитальной группировки (5) K-го блока искажения навигационных параметров (1.1),…,(1.k), выход (8.3) цифроаналогового преобразователя (8) каждого блока искажения навигационных параметров (1.1),…,(1.k) соединен со вторым входом (16.2) преобразователя частоты (16) K-го передатчика (15.1),…,(15.k), выход опорного генератора (2) в каждом из K блоков искажения навигационных параметров (1.1),…,(1.k) соединен с входом усилителя (3), выход которого соединен с первым входом (16.1) преобразователя частоты (16), с соответствующим вторым входом (13.2.1),…,(13.2.k) многоканального коррелятора (13) и вторым входом (4.3) высокоскоростного компаратора (4), выход (16.4) преобразователя частоты (16) соединен с входом (17.2) усилителя (17), выход (17.1) каждого K-го передатчика (15.1),…,(15.k) соединен через комбайнер (18) с передающей антенной (10), вход/выход (19.1) пульта управления (19) соединен с входом/выходом (5.4) блока расчета псевдопараметров орбитальной группировки (5) каждого из K-х блоков искажения навигационных параметров (1.1),…,(1.k), выходы (19.2.1),…,(19.2.k) пульта управления (19) соединены с соответствующими входами (17.3) усилителей (17) каждого K-го передатчика (15.1),…,(15.k), а блок питания (20) соединен со всеми электропотребляющими элементами устройства.
2. Устройство по п. 1, отличающееся тем, что пульт управления (19) выполнен в виде дисплея с тачскрином.
3. Устройство по п. 1, отличающееся тем, что пульт управления (19) выполнен в виде персональной ЭВМ с программным обеспечением.
4. Устройство по п. 1, отличающееся тем, что пульт управления (19) выполнен выносным на расстояние L (м) от устройства.
5. Устройство по п. 1, отличающееся тем, что блок питания (20) включает разъем (21) для подключения к внешней сети электропитания, а также по меньшей мере одну аккумуляторную батарею (22) и преобразователь-стабилизатор питающего напряжения (23), установленные в корпусе (24) устройства.
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2012 |
|
RU2495527C1 |
| Гонок для ткацкого станка | 1932 |
|
SU31891A1 |
| Передатчик мультиполяризационных помех с повышенной энергетической эффективностью | 2021 |
|
RU2772572C1 |
| CN 108809473 A, 13.11.2018 | |||
| WO 2023057717 A1, 13.04.2023 | |||
| US 2016057580 A1, 25.02.2016. | |||

