Изобретение относится к способу, обеспечивающему определение плановых координат воздушной цели в многопозиционной радиолокационной системе (МПРЛС), встроенной в пространственно-распределенную систему радиопомех, на основе анализа отклика, полученного в единственном бистатическом звене «передатчик-цель-приемник».
Известны МПРЛС [1-8], которые с целью многофункционального использования радиотехнических систем созданы на основе пространственно-распределенной системы радиоподавления навигационной аппаратуры потребителей (НАП) глобальной навигационной спутниковой системы (ГНСС) [5-8]. Такие МПРЛС состоят из N передатчиков радиопомех и M приемников отраженных от целей сигналов. Передатчики излучают фазокодоманипулированные псевдослучайной последовательностью (ФКМ ПСП) помеховые сигналы, которые помимо основной функции радиоподавления НАП ГНСС дополнительно выполняют функцию подсвета целей. Приемники отраженных от целей сигналов синхронизированы между собой и с передатчиками помех и объединены линиями связи с пунктом управления. При этом на пункте управления для определения координат воздушной цели используется суммарно-дальномерный или разностно-дальномерный метод позиционирования.
Однако, для реализации этих методов требуется, чтобы на этапе первичной обработки в МПРЛС отклик цели был обнаружен не менее чем в двух (для 2D позиционирования) или трех (для 3D позиционирования) каналах обработки сигналов (бистатических звеньях «передатчик-цель-приемник»). Это является основным недостатком такой МПРЛС, поскольку в условиях малой мощности радиолиний «передатчик-приемник» и применения малоразмерных воздушных целей с малой эффективной поверхностью рассеяния, отношение сигнал/шум в каналах первичной обработки сигналов будет мало и сигнал на их выходах превысит установленный порог обнаружения в одном канале, для которого суммарная дальность «передатчик-цель-приемник» будет минимальна. В этом случае определение координат воздушной цели с использованием суммарно-дальномерного или разностно-дальномерного методов позиционирования становится невозможным.
Кроме того, недостатком такой МПРЛС является необходимость реализации линий передачи данных с высокой пропускной способностью для передачи сигналов от разных приемных позиций на пункт управления для определения координат цели одним из указанных методов.
Техническое решение направленно на определение координат воздушной цели в МПРЛС, встроенной в пространственно-распределенную систему радиопомех, на основе анализа отклика, полученного в единственном бистатическом звене «передатчик-цель-приемник».
Технический результат достигается тем, что в многопозиционной радиолокационной системе, встроенной в пространственно-распределенную систему радиопомех и использующей для подсвета целей помеховый сигнал передатчика автоматизированной станции помех (АСП), применяется K-канальное приемное устройство, состоящее из K антенн (k=1, 2, …, K), образующих антенную решетку с одной центральной антенной и K-1 периферийными антеннами, K приемников, K аналого-цифровых преобразователей (АЦП), K-канального цифрового вычислителя, синтезатора частот и обеспечивающее:
- независимую корреляционную обработку сигнала передатчика, отраженного от воздушной цели, в каждом канале приемного устройства с определением оценок задержки и фазы откликов воздушной цели в точках максимума корреляционной функции;
- формирование вектора-столбца оценок задержки откликов воздушной цели, зарегистрированных в каждом канале приемного устройства, и вектора-столбца коэффициентов, обусловленных сдвигом фаз откликов, зарегистрированных в центральном и в каждом периферийном канале приемного устройства;
- формирование матрицы направленности антенной решетки, зависящей от ее геометрических параметров и определяющей сдвиги фаз сигналов в каждой периферийной антенне относительно сигнала в центральной антенне при приходе сигнала с заданного направления;
- оценку направления прихода сигнала, отраженного от воздушной цели, по максимуму пространственного спектра, получаемого путем перемножения матрицы направленности антенной решетки и вектора сдвига фаз принятого сигнала;
- оценку расстояния «цель-центральная антенна», получаемую с использованием известного значения направления на передатчик АСП, оценочного значения направления на воздушную цель из точки расположения центральной антенны приемного устройства, известного значения дальности «передатчик-центральная антенна» и оценочного значения суммарной дальности «передатчик-цель-центральная антенна», получаемого на основании оценочного значения задержки отклика воздушной цели, зарегистрированного в центральном канале приемного устройства;
- оценку прямоугольных координат воздушной цели на основании оценочного значения расстояния «цель-центральная антенна» и оценочного значения направления на воздушную цель из точки расположения центральной антенны приемного устройства.
Сущность изобретения поясняется рисунками.
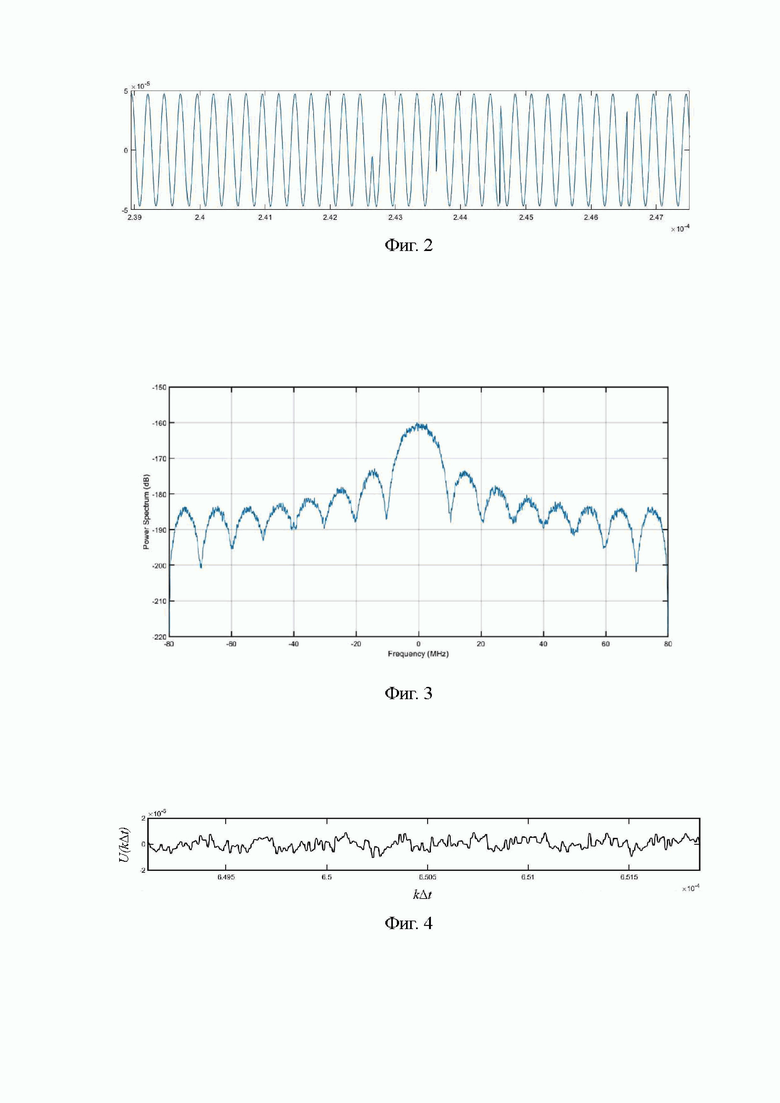
На фиг. 1 показана схема угломерно-эллиптической МПРЛС, на фиг. 2 показан сигнал 
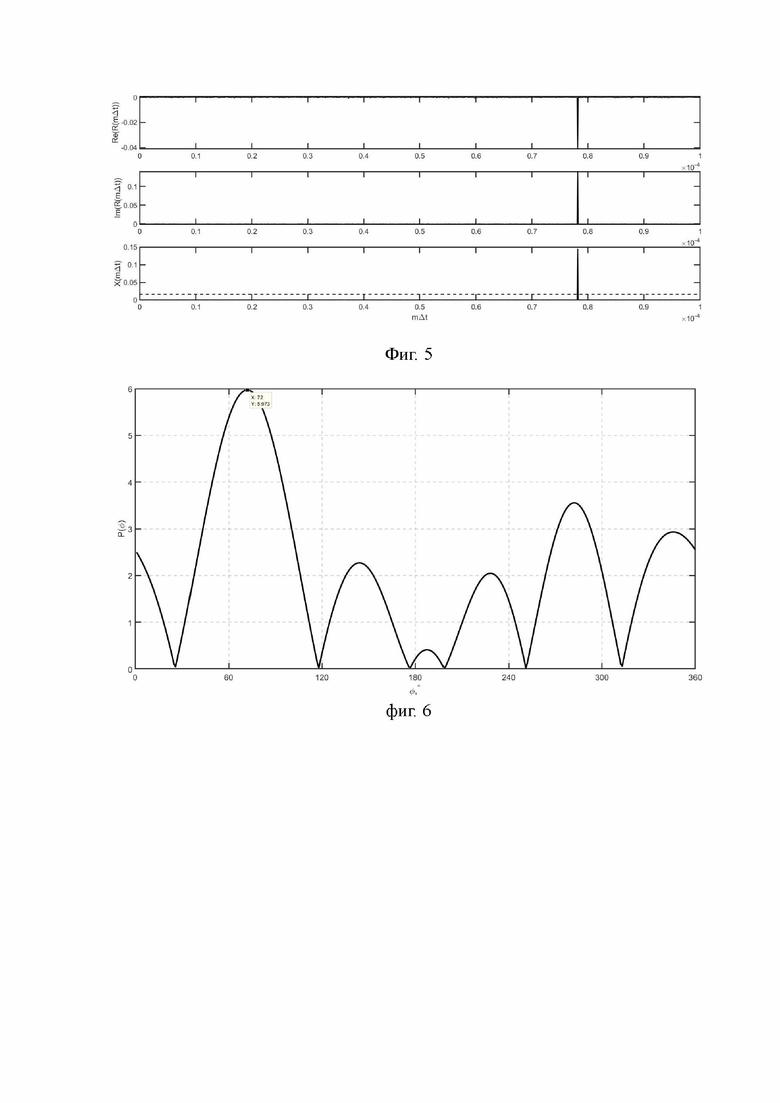
 , на фиг. 5 показаны действительная (а), мнимая (б) составляющие и огибающая, (в) корреляционной функции
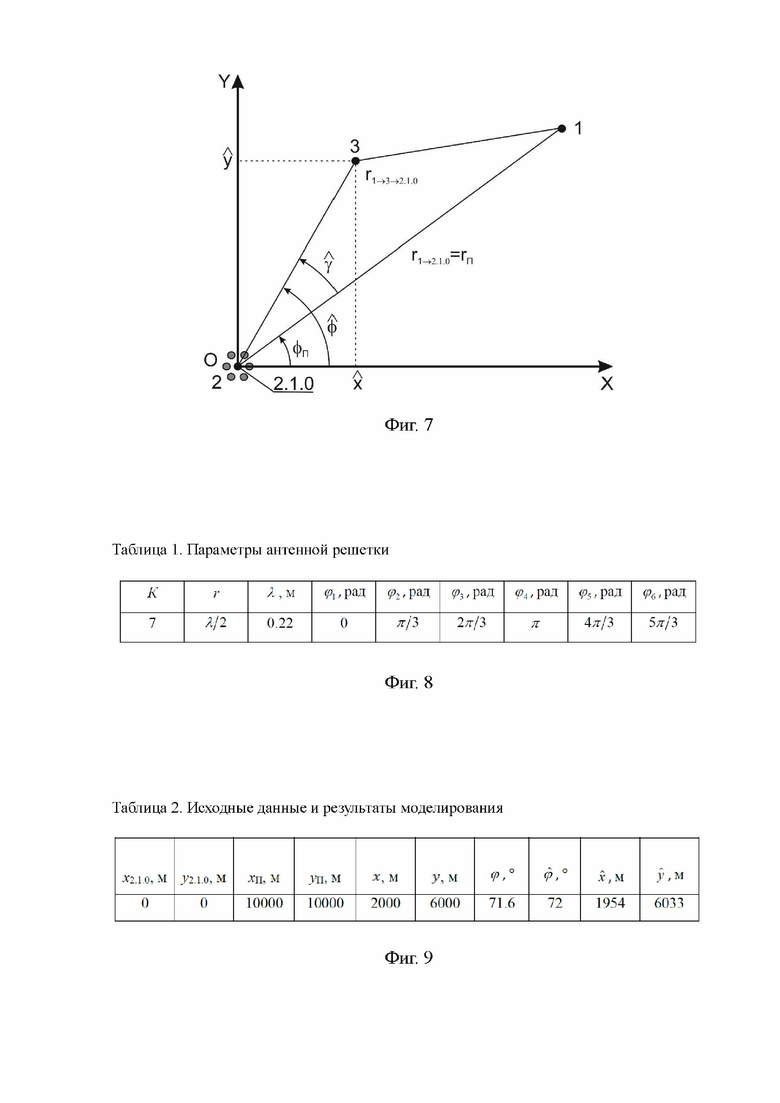
, на фиг. 5 показаны действительная (а), мнимая (б) составляющие и огибающая, (в) корреляционной функции  , на фиг. 6 показан пространственный спектр P сигнала, отраженного от воздушной цели и принятого антенной решеткой 2.1, на фиг. 7 приведена иллюстрация процесса оценки координат воздушной цели угломерно-эллиптическим способом, на фиг. 8 приведена таблица 1, содержащая параметры антенной решетки, используемые для численного имитационного моделирования, на фиг. 9 приведена таблица 2, содержащая исходные данные и результаты численного имитационного моделирования, на фиг. 10 графически показаны результаты численного имитационного моделирования.
, на фиг. 6 показан пространственный спектр P сигнала, отраженного от воздушной цели и принятого антенной решеткой 2.1, на фиг. 7 приведена иллюстрация процесса оценки координат воздушной цели угломерно-эллиптическим способом, на фиг. 8 приведена таблица 1, содержащая параметры антенной решетки, используемые для численного имитационного моделирования, на фиг. 9 приведена таблица 2, содержащая исходные данные и результаты численного имитационного моделирования, на фиг. 10 графически показаны результаты численного имитационного моделирования.
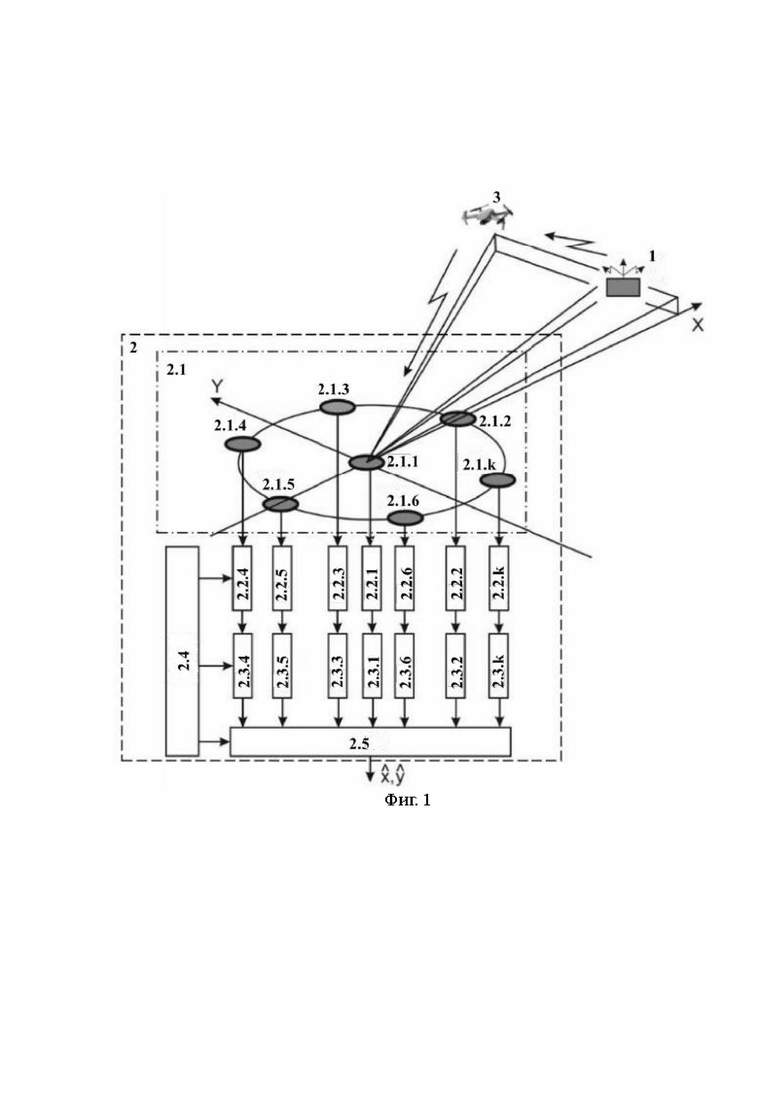
Способ определения плановых координат воздушной цели с помощью многопозиционной радиолокационной системы, встроенной в пространственно-распределенную систему радиопомех, реализуется в МПРЛС, которая состоит из передатчика 1 автоматизированной станции помех (АСП), K-канального приемного устройства 2, состоящего из K антенн 2.1.k (k=1, 2, …, K), образующих антенную решетку 2.1 с одной центральной антенной 2.1.1 и K-1 периферийными антеннами 2.1.k (k=2, 3, …, K), расположенными в узлах правильного (K-1)-угольника, K приемников 2.2.k (k=1, 2, …, K), K аналого-цифровых преобразователей (АЦП) 2.3.k (k=1, 2, …, K), K-канального цифрового вычислителя 2.4, синтезатора частот 2.5 (фиг. 1).
Геометрический центр центральной антенны 2.1.1 является началом прямоугольной горизонтальной декартовой системой координат XOY, а полярные координаты периферийных антенн 2.1.k (r,φk) заданы, где r=λ/2 -радиус антенной решетки (расстояние между центральной антенной 2.1.1 и периферийными антеннами 2.1.k), равный половине длины волны λ помехового сигнала, а угол φk отсчитывается против часовой стрелки от оси OX и определяется, исходя из выражения
 . (1)
. (1)
Прямоугольные координаты периферийных антенн 2.1.k определяются из выражений
 , (2)
, (2)
 . (3)
. (3)
Прямоугольные координаты (xП, yП) передатчика 1 АСП известны, а полярные координаты (rП, φП) определяются, исходя из выражений
Способ определения плановых координат воздушной цели с помощью многопозиционной радиолокационной системы, встроенной в пространственно-распределенную систему радиопомех, осуществляется следующим образом.
1. Передатчик 1 АСП формирует и излучает помеховый ФКМ сигнал

где A -амплитуда сигнала, G(t) -псевдослучайная последовательность (ПСП), f0 -несущая частота сигнала, ψ -начальная фаза сигнала.
2. Излученный сигнал передатчика 1 АСП отражается от воздушной цели 3 с координатами (x, y), находящейся в зоне радиовидимости МПРЛС, и поступает на вход K-канального приемного устройства 2 (фиг. 1).
3. В каждом k-ом канале приемного устройства 2 осуществляются следующие операции:
- сигнал, отраженный от воздушной цели 3, принимается антенной 2.1.k антенной решетки 2.1 и без учета доплеровского смещения частоты имеет вид (фиг. 2)
 , (7)
, (7)
где Ak -амплитуда отраженного от цели сигнала,  -задержка сигнала, определяемая взаимным расположением передатчика, приемника и цели
-задержка сигнала, определяемая взаимным расположением передатчика, приемника и цели
 , (8)
, (8)
где  - расстояние «передатчик 1-цель 3»,
- расстояние «передатчик 1-цель 3»,  - расстояние «цель 3-антенна 2.1.k», с -скорость света.
- расстояние «цель 3-антенна 2.1.k», с -скорость света.
- с выхода антенны 2.1.k сигнал  поступает в приемник 2.2.k, где осуществляется его селекция, усиление и перенос его спектра на нулевую частоту (фиг. 3).
поступает в приемник 2.2.k, где осуществляется его селекция, усиление и перенос его спектра на нулевую частоту (фиг. 3).
- с выхода приемника 2.2.k сигнал на нулевой частоте поступает на АЦП 2.3.k, где осуществляется его аналогово-цифровое преобразование с формированием комплексных отсчетов цифрового сигнала на нулевой частоте  , где
, где  показана на фиг. 4).
показана на фиг. 4).
4. С выходов АЦП 2.3.k цифровые сигналы на нулевой частоте , поступают в K-канальный цифровой вычислитель 2.4, где в каждом k-ом канале осуществляются следующие операции:
- обработка в фильтре, согласованном с ПСП передатчика 1 АСП, с формированием комплексной корреляционной функции (фиг. 5 а, б)
 , (9)
, (9)
 , (10)
, (10)
 , (11)
, (11)
где L - длина ПСП в дискретных отсчетах, 
- вычисление огибающей корреляционной функции (фиг. 5в)

- вычисление среднеквадратического отклонения (СКО) отсчетов корреляционной функции 
- определение максимального значения  огибающей корреляционной функции, которое сравнивается с порогом обнаружения, при этом воздушной цель 3 считается обнаруженной если значение огибающей корреляционной функции превысило порог обнаружения
огибающей корреляционной функции, которое сравнивается с порогом обнаружения, при этом воздушной цель 3 считается обнаруженной если значение огибающей корреляционной функции превысило порог обнаружения
- в случае обнаружения воздушной цели 3 определяется соответствующий номер отсчета огибающей корреляционной функции
 , (15)
, (15)
- определяется оценка задержки отклика цели в k-ом канале
 , (16)
, (16)
- определяется оценка фазы сигнала в момент регистрации отклика в k-ом канале
Перечисленные в п. 3 и п. 4 операции первичной обработки сигнала независимо осуществляется в каждом канале приемного устройства 2, при условии, что все тактовые и опорные частоты во всех K каналах формируются от одного синтезатора частот 2.5.
5. В результате первичной обработки сигналов во всех K каналах приемного устройства 2 в цифровом вычислителе 2.4 формируются вектор-столбец размером Kх1 оценок задержки отклика воздушной цели 3
 (18)
(18)
и вектор-столбец размером Kх1 оценок фазы сигнала, отраженного от воздушной цели 3
 , (19)
, (19)
которые служат исходными данными для следующих операций вторичной обработки, осуществляемых в цифровом вычислителе 2.4:
- вектор  преобразуется в вектор-столбец (размером (K-1)х1) коэффициентов, обусловленных сдвигом фаз сигналов, отраженных от воздушной цели 3 и зарегистрированных в центральном и в каждом периферийном канале приемного устройства 2,
преобразуется в вектор-столбец (размером (K-1)х1) коэффициентов, обусловленных сдвигом фаз сигналов, отраженных от воздушной цели 3 и зарегистрированных в центральном и в каждом периферийном канале приемного устройства 2,
 , (20)
, (20)
где  . Вектор
. Вектор 
- для всей K-элементной антенной решетки 2.1 в диапазоне углов 


 при приходе сигнала с n-го направления
при приходе сигнала с n-го направления 
 ;(21)
;(21)
- формируется пространственный спектр P сигнала, отраженного от воздушной цели 3 и принятого антенной решеткой 2.1, путем перемножения матрицы направленности и вектора сдвига фаз принятого сигнала
 . (22)
. (22)
Пространственный спектр P представляет собой вектор-столбец размером (Nx1) (фиг. 6);
- определяется оценка  направления прихода сигнала, отраженного от воздушной цели 3 и принятого антенной решеткой 2.1, как направление, соответствующее максимальному значению полученного пространственного спектра
направления прихода сигнала, отраженного от воздушной цели 3 и принятого антенной решеткой 2.1, как направление, соответствующее максимальному значению полученного пространственного спектра
 ; (23)
; (23)
- оценивается расстояние  «цель 3-центральная антенна 2.1.1», исходя из выражения
«цель 3-центральная антенна 2.1.1», исходя из выражения
 ,(24)
,(24)
где  -угол между направлением на передатчик 1 АСП и оценочным направлением на воздушную цель 3 из точки расположения центральной антенны 2.1.1,
-угол между направлением на передатчик 1 АСП и оценочным направлением на воздушную цель 3 из точки расположения центральной антенны 2.1.1,  -оценка суммарной дальности «передатчик 1-цель 3-центральная антенна 2.1.1»,
-оценка суммарной дальности «передатчик 1-цель 3-центральная антенна 2.1.1»,  -дальность «передатчик 1-центральная антенна 2.1.1», равная полярной координате
-дальность «передатчик 1-центральная антенна 2.1.1», равная полярной координате  точки расположения передатчика 1 АСП (фиг. 7);
точки расположения передатчика 1 АСП (фиг. 7);
- с использованием оценочных значений расстояния «цель 3-центральная антенна 2.1.1» и направления на воздушную цель 3 из точки расположения центральной антенны 2.1.1, оценивается прямоугольные координаты воздушной цели 3
 , (25)
, (25)
 . (26)
. (26)
Параметры антенной решеткой 2.1, использованные для численного имитационного моделирования представлены в таблице 1 на фиг. 8.
Прямоугольные координаты приемного устройства 2 (геометрического центра центральной антенны 2.1.1 антенной решетки 2.1), передатчика 1 АСП и истинные координаты воздушной цели 3, использованные при моделировании в качестве исходных данных, а также оценка направления на воздушную цель 3 и оценки координат воздушной цели 3, полученные в ходе численного имитационного моделирования, представлены в таблице 2 на фиг. 9.
Графически результаты численного имитационного моделирования определения координат воздушной цели 3 в МПРЛС приведены на фиг. 10, где передатчик 1 АСП показан ромбом, приемное устройство 2 обозначено квадратом, истинное положение воздушной цели 3 показано крестиком, а оценочное положение воздушной цели 3 обозначено звездой.
Анализ фиг. 9 и фиг. 10 показывает, что предложенная угломерно-эллиптическая МПРЛС, встроенная в пространственно-распределенную систему радиопомех и реализующая предложенный способ определения координат воздушной цели 3, с высокой точностью обеспечивает измерение координат воздушной цели 3, отклик которой зарегистрирован в единственном бистатическом звене «передатчик-цель-приемник».
Таким образом, предложенный способ определения плановых координат воздушной цели с помощью многопозиционной радиолокационной системы, встроенной в пространственно-распределенную систему радиопомех, обеспечивает определение координат воздушной цели на основе анализа отклика, зарегистрированного в единственном бистатическом звене «передатчик-цель-приемник» в МПРЛС, встроенной в пространственно-распределенную систему радиопомех, приемная позиция которой оборудована антенной решеткой 2.1.
Разработанный способ обеспечивает точность позиционирования воздушной цели 30-50 м при суммарной дальности бистатического звена «передатчик-цель-приемник» 15-20 км и погрешности пеленгования не более 1.
Источник информации
1.Черняк В.С. Многопозиционная радиолокация. М.: Радио и связь, 1993. - 416 с.
2. Фадеев Р.С. Возможности обнаружения и определения координат малозаметных целей в многопозиционных радиолокационных системах с размещением позиций на борту беспилотных летательных аппаратов / Фадеев Р.С., Мякиньков А.В., Буров В.Н., Огурцов А.Г. // Известия ВУЗов России. Радиоэлектроника. 2014, Вып. 6, С. 29-35.
3. Kaplan L.M., Bar-Shalom Y., Blair W.D. Assignment Costs for Multiple Sensor Track-to-Track Association. IEEE Transactions on AES. April 2008, 44(2), 655-677.
4. Kiryushkin V.V., Cherepanov D.A. Coordinates estimation of the air target in the multiitem observation system «navigation satellites -the air target -the ground receiver» J. Sib. Fed. Univ. Eng. technol., 2016, 9(8), 1172-1182. DOI: 10.17516/1999-494X-2016-9-8-1172-1182.
5. Журавлев А.В., Кирюшкин В.В., Коровин А.В., Савин Д.И. Синтез многопозиционных радиолокационных систем на базе специализированных излучателей // Радиотехника, 2018, № 7, 109 -118.
6. Журавлев А.В., Кирюшкин В.В., Бабусенко С.И., Маркин В.Г. Имитационное моделирование процесса первичной обработки сигналов в приемнике многопозиционной радиолокационной системы на основе специальных излучателей // Радиотехника.2020. Т. 84. № 6(12). C. 58-66. DOI: 10.18127/j00338486-202006(12)-10.
7. Шуваев В.А., Журавлев А.В., Кирюшкин В.В., Бабусенко С.И. Экспериментальная проверка возможности регистрации откликов воздушных целей в многопозиционной радиолокационной системе на основе специальных излучателей // Радиотехника. 2020. Т. 84. № 6(12). С. 121-130. DOI: 1018127/j00338486-202006(12)-19.
8. Патент № 2734690 РФ, МПК G01S 5/02, G01C 21/04. Способ определения координат воздушной цели в многопозиционной наземной системе наблюдения Радиопередатчики-воздушная цель-приемник / А.В. Журавлев, А.Ф. Иванов, В.В. Кирюшкин и др. (РФ); Открытое акционерное научно-внедренческое предприятие «ПРОТЕК» (РФ). - № 2019143788; Заявлено 23.12.2019; Опубл. 22.10.2020, Бюл. 30. - 12 с.: 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат воздушного судна по сигналам несинхронизированных передатчиков помех глобальным навигационным спутниковым системам | 2023 |
|
RU2811068C1 |
| Способ определения координат воздушных целей в многопозиционной радиолокационной системе в условиях малого значения отношения сигнал/шум | 2019 |
|
RU2722209C1 |
| Устройство компенсации прямого и отраженного от стационарного объекта радиолокационных сигналов радиопередатчика в приемнике бистатической радиолокационной системы | 2019 |
|
RU2734233C1 |
| Устройство компенсации прямого радиолокационного сигнала радиопередатчика в приемнике двухпозиционной радиолокационной системы | 2019 |
|
RU2716154C1 |
| РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2422849C1 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| ГЛОБАЛЬНАЯ НАЗЕМНО-КОСМИЧЕСКАЯ СИСТЕМА ОБНАРУЖЕНИЯ ВОЗДУШНЫХ И КОСМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2578168C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 2012 |
|
RU2646847C2 |
| НАЗЕМНО-КОСМИЧЕСКИЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2006 |
|
RU2324951C2 |
| Способ пространственной компенсации прямого и отраженных сигналов при обнаружении отраженного сигнала от воздушной цели бистатической радиолокационной системой | 2020 |
|
RU2739938C1 |

Изобретение относится к способу, обеспечивающему определение плановых координат воздушной цели в многопозиционной радиолокационной системе (МПРЛС), встроенной в пространственно-распределенную систему радиопомех, на основе анализа отклика, полученного в единственном бистатическом звене «передатчик-цель-приемник». Технический результат заключается в определении координат воздушной цели в МПРЛС на основе анализа отклика, полученного в единственном бистатическом звене «передатчик-цель-приемник». В заявленном способе применяют МПРЛС, встроенную в пространственно-распределенную систему радиопомех и использующую для подсвета целей помеховый сигнал передатчика автоматизированной станции помех (АСП). K-канальное приемное устройство МПРЛС состоит из K антенн (k=1, 2, …, K), образующих антенную решетку с одной центральной антенной и K-1 периферийными антеннами, K приемников, K аналого-цифровых преобразователей (АЦП), K-канального цифрового вычислителя и синтезатора частот. В заявленном способе осуществляют независимую корреляционную обработку сигнала передатчика, отраженного от цели, в каждом канале приемного устройства с определением оценок задержки и фазы откликов цели в точках максимума корреляционной функции, формирование вектора-столбца оценок задержки откликов воздушной цели, зарегистрированных в каждом канале приемного устройства, и вектора-столбца коэффициентов, обусловленных сдвигом фаз откликов, зарегистрированных в центральном и в каждом периферийном канале приемного устройства. Формируют матрицу направленности антенной решетки, зависящую от ее геометрических параметров и определяющую сдвиги фаз сигналов в каждой периферийной антенне относительно сигнала в центральной антенне. Проводят оценку направления прихода сигнала, отраженного от воздушной цели, оценку расстояния «цель-центральная антенна», и с использованием этих значений получают оценку прямоугольных координат цели. 10 ил.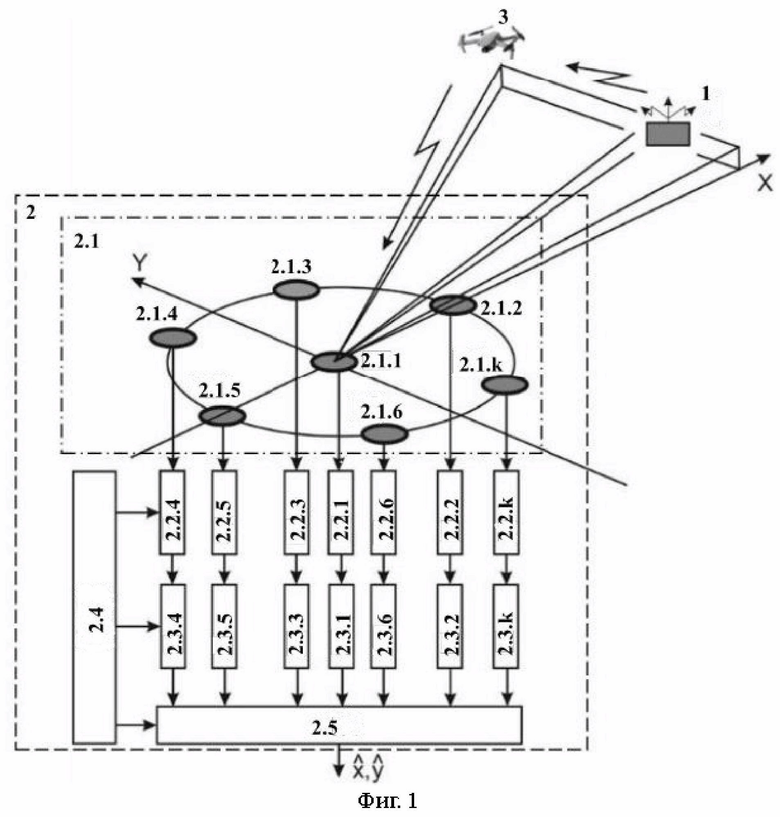
Способ определения плановых координат воздушной цели с помощью многопозиционной радиолокационной системы (МПРЛС), встроенной в пространственно-распределенную систему радиопомех и использующей для подсвета воздушных целей помеховый сигнал передатчика автоматизированной станции помех (АСП), отличающийся тем, что в составе МПРЛС применяется K-канальное приемное устройство, состоящее из K антенн (k=1, 2, …, K), образующих антенную решетку с одной центральной антенной и K-1 периферийными антеннами, K приемников, K аналого-цифровых преобразователей (АЦП), K-канального цифрового вычислителя, синтезатора частот и обеспечивающее:
- независимую корреляционную обработку сигнала передатчика, отраженного от воздушной цели, в каждом канале приемного устройства с определением оценок задержки и фазы откликов воздушной цели в точках максимума корреляционной функции;
- формирование вектора-столбца оценок задержки откликов воздушной цели, зарегистрированных в каждом канале приемного устройства, и вектора-столбца коэффициентов, обусловленных сдвигом фаз откликов, зарегистрированных в центральном и в каждом периферийном канале приемного устройства;
- формирование матрицы направленности антенной решетки, зависящей от ее геометрических параметров и определяющей сдвиги фаз сигналов в каждой периферийной антенне относительно сигнала в центральной антенне при приходе сигнала с заданного направления;
- оценку направления прихода сигнала, отраженного от воздушной цели, по максимуму пространственного спектра, получаемого путем перемножения матрицы направленности антенной решетки и вектора сдвига фаз принятого сигнала;
- оценку расстояния «цель - центральная антенна», получаемую с использованием известного значения направления на передатчик АСП, оценочного значения направления на воздушную цель из точки расположения центральной антенны приемного устройства, известного значения дальности «передатчик - центральная антенна» и оценочного значения суммарной дальности «передатчик - цель - центральная антенна», получаемого на основании оценочного значения задержки отклика воздушной цели, зарегистрированного в центральном канале приемного устройства;
- оценку прямоугольных координат воздушной цели на основании оценочного значения расстояния «цель - центральная антенна» и оценочного значения направления на воздушную цель из точки расположения центральной антенны приемного устройства.
| Способ определения координат воздушной цели в многопозиционной наземной системе наблюдения Радиопередатчики-воздушная цель-приемник | 2019 |
|
RU2734690C1 |
| Способ определения параметров движения и траекторий воздушных объектов при полуактивной бистатической радиолокации | 2018 |
|
RU2687240C1 |
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2013 |
|
RU2542330C1 |
| Способ отождествления сигналов, рассеянных воздушными целями, многопозиционной пространственно распределенной радионавигационной системой с использованием измерений направлений на воздушные цели | 2019 |
|
RU2703718C1 |
| СПОСОБ КОНТРОЛЯ ВОЗДУШНОГО ПРОСТРАНСТВА | 2001 |
|
RU2215303C2 |
| ЖУРАВЛЕВ А.В., КИРЮШКИН В.В., БАБУСЕНКО С.И., МАРКИН В.Г | |||
| Имитационное моделирование процесса первичной обработки сигналов в приемнике многопозиционной радиолокационной системы на основе специальных излучателей // | |||

