Изобретение относится к области использования устройств, осуществляющих измерения механических свойств материалов путем контролируемого по глубине и нагрузке вдавливания твердого наконечника в тестируемый материал, а также царапания с заданной вертикальной нагрузкой и скоростью горизонтального перемещения индентора, и может использоваться в качестве микротвердомера, нанотвердомера и склерометра.
Из уровня техники известна конструкция нанотвердомера (https://www.kla-tencor.com/documents/KLA_Brochure_NI-G200.pdf), включающая жесткий корпус, в котором расположены подвижные элементы, механический актюатор, преобразующий входное электрическое воздействие в линейное перемещение и нагрузочное усилие, жесткий шток с индентором на конце, соединенного с актюатором и упругой системой подвеса штока и емкостного датчика, фиксирующего перемещение штока по отношению к жесткому корпусу прибора и состоявшего из одной подвижной и двух неподвижных токопроводящих пластин. Такая конфигурация нанотвердомера позволяет осуществлять инструментальное индентирование строго в соответствии с существующими стандартами (ГОСТ Р 8.748 и ISO 14577) в широком диапазоне рабочих нагрузок и глубин погружения индентора в материал.
Однако одноступенчатая схема инструментального индентирования содержит противоречие между низкой силовой нагрузкой и большим ходом штока, что не позволяет с требуемой точностью осуществлять индентирования мягких образцов, в том числе биологических и полимерных материалов.
Одним из способов адаптации нанотвердомеров к работе с такими материалами является максимальное облегчение подвижной системы прибора и отказ от электромагнитного актюатора с переходом на чисто емкостную схему, как задания усилия, так и измерения перемещения штока. Примером такого рода подхода является Hysitron TI 990 TriboIndenter (http://www.bruker.com/en/products-and-solutions/test-and-measurement/nanomechanical-test-systems/hysitron-ti-990-nanoindenter.html;
https://www.uphf.fr/sites/default/files/media/2022-11/bruker_hysitron_ti980.pdf;
https://bruker.nt-rt.ru/images/manuals/instrum4.pdf).
Однако данное техническое решение обладает ограниченными возможностями по части больших усилий и глубин индентирования в силу использования чисто емкостной схемы нагружения и малости пондемоторных сил возникающих между обкладками емкостного задатчика силы при подаче на них электрического напряжения. Приборы с электромагнитными актюаторами при попытке сохранить большой ход индентора при минимизации подвижной массы сталкиваются с необходимостью использования мягкой системы подвеса, что приводит к крайне низким значениям частоты механического резонанса (в районе нескольких десятков Гц) и, как следствие, плохой вибразащищенности прибора.
Другим хорошо зарекомендовавшем себя подходом является использование в составе нанотвердомера специальной силовой ячейки, позволяющей напрямую, без учета затрат на деформацию пружин повеса индентора, осуществлять измерение усилия индентирования. Именно такого типа устройство выбрано в качестве прототипа обсуждаемого динамического наноиндентора.
В качестве прототипа выбран динамический наноиндентор (RU 2721020, кл. G01N 3/40, 2020 г) включающий корпус прибора с закрепленным на нем актюатором с подвижной катушкой, связанной со штоком, емкостной датчик и индентор, смонтированный на свободном конце штока. Внутри корпуса прибора на упругих подвесах закреплена силовая ячейка. К верхней части ячейки прикреплен промежуточный подвижный шток, связанный с подвижной катушкой актюатора и с емкостным датчиком актюатора, подвижная обкладка которого закреплена на промежуточном подвижном штоке, для измерения перемещения корпуса силовой ячейки по отношению к корпусу прибора. Внутри корпуса силовой ячейки смонтированы гибкие мембраны, на которых, соосно промежуточному штоку, закреплен рабочий шток с индентором на конце и емкостной датчик силы, осуществляющий измерения приложенной силы на основании измерения перемещения рабочего штока по отношению к корпусу силовой ячейки. Под нижним упругим подвесом размещен емкостный датчик, для измерения величины перемещения рабочего штока по отношению к корпусу прибора и определения глубины погружения индентора в тестируемый материал. Подвижные обкладки емкостного датчика силы и емкостного датчика глубины перемещения закреплены на подвижном рабочем штоке.
Недостатком данного наноиндентора, как большинства других, является низкая точность измерения ряда динамических характеристик тестируемых материалов, в частности вязкоупругих параметров в широком диапазоне частот осцилляций, характера трещинообразования и других хрупких явлений в тестируемых материалах. Для прототипа затруднены исследования вязкоупругих свойств на частотах, существенно превышающих резонансные частоты систем подвеса, то есть больших 100 Гц.
Проблемой, на которую направлено изобретение, является усовершенствование конструкции динамического наноиндентора для осуществления возможности исследования зависимости твердости и модуля Юнга от глубины индентирования для гетерогенного и поверхностно модифицированного тестируемого материала, а также вязкоупругих свойств в широком диапазоне частот от сотых долей Гц до десятков кГц.
Техническим результатом изобретения является расширение функциональных возможностей динамического наноиндентора в части возможности регистрации сигналов акустической эмиссии и повышение точности измерения твердости и модуля Юнга, вязкоупругих и хрупких свойств тестируемого материала за счет расширения диапазона частот на которых осуществляется модуляция усилия индентирования.
Поставленная проблема и заявленный технический результат достигаются за счет того, что динамический наноиндентор включает корпус, внутри которого закреплены электромагнитный актюатор с подвижной катушкой, связанной через промежуточный шток и рабочий шток с индентором на его конце, емкостные датчики, между которыми установлена на упругих подвесах силовая ячейка, предметный столик для тестируемого материала. Согласно изобретению предметный столик выполнен в виде однородной или многослойной пьезокерамической пластины с металлическими электродами для подачи на пьезокерамическую пластину переменного управляющего электрического напряжения от 0,1 до 100 В и частотой от 0,01 Гц до 100 кГц. Пьезокерамическая пластина выполнена толщиной от 0,1 мм до 10 мм и площадью от 1 см2 до 10 см2 и закреплена на двухкоординатном макропозиционере.
Металлические электроды расположены на однородной пьезокерамической пластине на ее плоских сторонах.
Многослойная пьезокерамическая пластина, выполнена в виде сборки, состоявшей из чередующихся слоев пьзокерамики, поляризованных во встречно противоположные направления.
Металлические электроды закреплены на многослойной пьезокерамической пластине на границе раздела слоев и внешних плоских поверхностях.
Металлические электроды выполнены с возможностью подключения к усилителю электрических сигналов и далее к аналого-цифровому преобразователю для последующего преобразования сигналов акустической эмиссии в цифровой код.
Наличие двухкоординатного макропозиционера позволяет перемещать расположенную на нем пьезокерамическую пластину с тестируемым материалом в горизонтальной плоскости.
Выполнение предметного столика в виде однородной или многослойной пьезокерамической пластины с металлическими электродами обеспечивает работу динамического наноиндентора в режиме осциллирующего силового воздействия за счет создания колебаний в направлении перпендикулярном плоскости расположения тестируемого материала в нескольких режимах: контролируемое возвратно-поступательное перемещение тестируемого материала путем подачи на пьезоэлектрическую пластину переменного управляющего напряжения заданной формы и частоты, а также регистрацию сигналов акустической эмиссии, вызванных хрупким разрушением тестируемого материала и расслоением многослойных структур в ходе инструментального и микро индентирования, тем самым расширить функциональные возможности динамического наноиндентора.
Возможность работы в качестве акустического приемника, регистрирующего сигналы акустической эмиссии, реализуется при подключении металлических электродов пьезокерамической пластины к усилителю электрических сигналов и аналого-цифровому преобразователю, что обеспечивает преобразование сигналов в цифровой код.
При этом выполнение пьезокерамической пластины однородной, например из поляризованной пьезокерамики ЦТС-19, или в виде многослойной сборки состоявшей из чередующихся слоев пластин из пьезокерамики ЦТС-19, поляризованных во встречно противоположных направления, позволяет либо расширить частотный диапазон для однородной пластины, либо амплитуду колебаний для многослойной пластины. Увеличение амплитуды происходит за счет синфазного изменения толщины, составляющих сборку пластин при одновременной подаче электрического напряжения на все пластины сразу.
Наличие металлических электродов для подачи электрического переменного напряжения на пьезоэлектрическую пластину позволяет ей совершать толщинные колебания. Размеры пьезокерамического элемента определяются требованиями к максимальной частоте проведения динамических испытаний. При этом уменьшение толщины пластины менее 0,1 мм - не целесообразно по причине хрупкости пьезокерамических материалов, и возможности их разрушения при закреплении исследуемого образца и инструментальном индентировании. Использование пластины толщиной более 10 мм не обеспечит необходимого уровня однородности ее толщинных колебаний из-за превращения платины в параллелепипед и необходимости учета краевых эффектов колебания, что негативно повлияет на достоверность результатов.
Управляющее напряжение величиной от 0,1 В до 100 В и частотой от 0,01 Гц до 100 кГц задает амплитуду и частоту колебаний и для однородной пластины из ЦТС-19 может обеспечения амплитуды колебаний от 0,1 нм до 100 нм, а при использовании сборки из десяти пьезокерамических пластин эта величина будет в диапазоне от 1 нм до 1 мкм, что вполне достаточно для проведения исследования вязкоупругих механических свойств материалов путем динамического инструментального индентирования. Подача напряжений выше нескольких сотен вольт может приводить к электрическому пробою пьезоэлектрической пластины или механическому разрушению сборки из нескольких пластин.
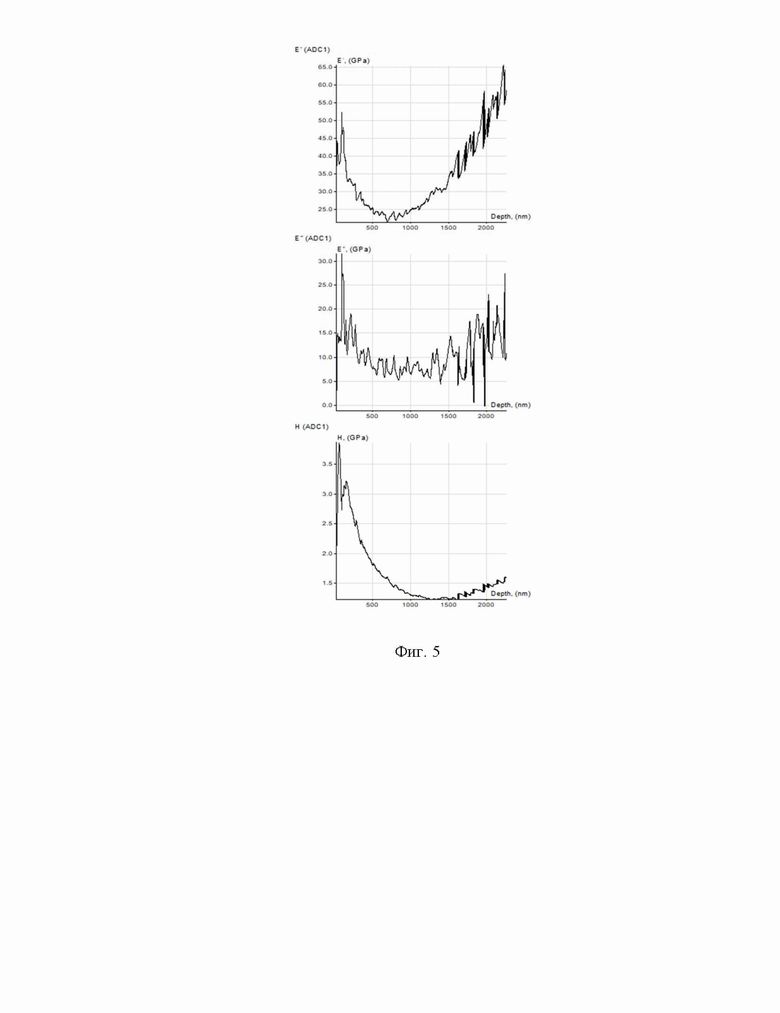
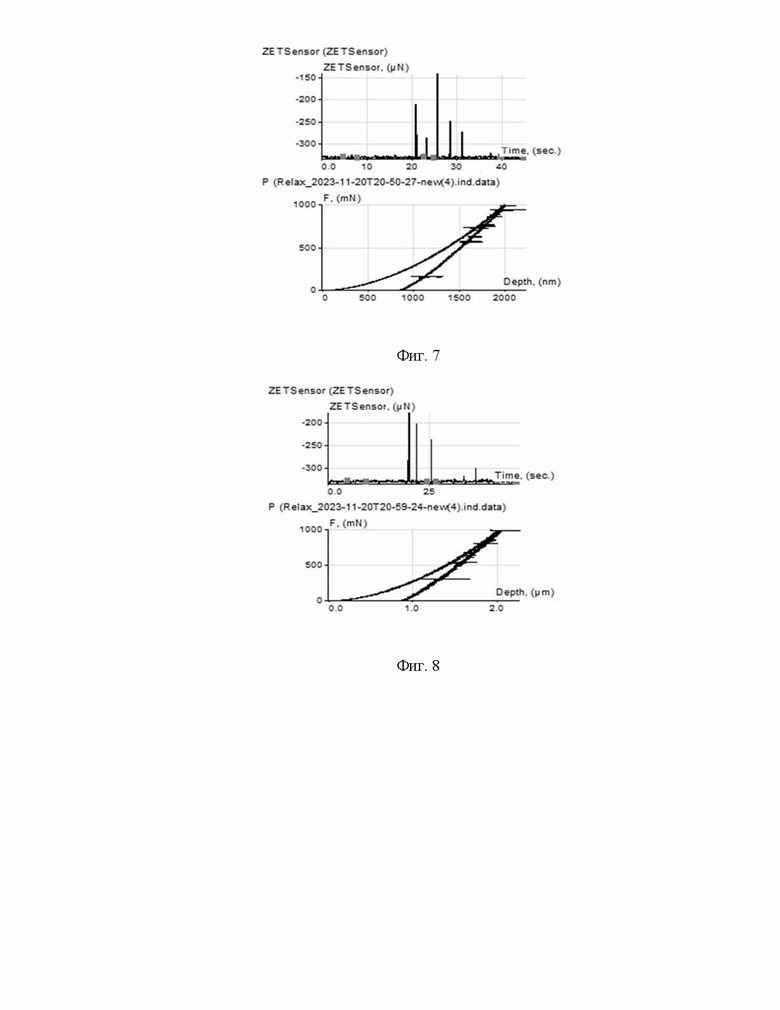
Изобретение поясняется чертежами, где на фиг. 1 представлена общая схема динамического наноиндентора; на фиг. 2 - фрагмент сигнала DMA измеренный датчиком глубины погружения при работе электромагнитного актюатора на низких частотах - 10 Гц; на фиг. 3 - фрагмент сигнала измерения глубины погружения при работе электромагнитного актюатора на высоких частотах - 500 Гц; на фиг. 4 - фрагмент сигнала измерения глубины погружения при работе активного предметного столика на частоте - 500 Гц; на фиг. 5 - измеренная методом DMA в стандартной компоновке динамического нанотвердомера зависимость механических свойств исследуемого материала, на примере стали 36НХТЮ с поверхностным упрочнением от глубины погружения индентора; на фиг. 6 - измеренная методом DMA зависимость механических свойств исследуемого материала, на примере стали 36НХТЮ с поверхностным упрочнением от глубины погружения инденторана при подаче сигнала DMA на активный пьезокерамический столик; на фиг. 7 - временная зависимость сигнала акустической эмиссии и проявления факта образования трещин на кривой инструментального индентирования, материал закаленное стекло, усилие индентирования 1 Н; на фиг. 8 - еще один пример временной зависимости сигнала акустической эмиссии и проявления факта образования трещин на кривой инструментального индентирования, материал закаленное стекло, усилие индентирования 1 Н.
Динамический наноиндентор представлен следующими позициями:
1 - корпус;
2 - электромагнитный актюатор;
3 - подвижная катушка;
4 - промежуточный шток;
5 - неподвижные обкладки емкостного датчика;
6 - верхний упругий подвес;
7 - силовая ячейка, расположенная между емкостными датчиками;
8 - мембрана силовой ячейки 7;
9 - мембрана силовой ячейки 7;
10 - рабочий шток;
11 - электроды пьезокерамической пластины;
13 - нижний упругий подвес;
14 - неподвижные обкладки емкостного датчика глубины погружения;
15 - индентор, расположенный на конце рабочего штока;
16 - двухкоординатный макропозиционер;
17 - подвижный электрод емкостного датчика;
18 - подвижный электрод емкостного датчика силы прижима;
19 - подвижный электрод емкостного датчика глубины погружения;
20 - предметный столик для тестируемого материала;
21 - тестируемый материал.
Динамический наноиндентор работает следующим образом.
Тестируемый материал 21, например, полимерный материл, с упрочняющим покрытием, помещали на предметный столик 20 напротив острия индентора 15. При осуществлении нагружения и разгрузки под действием электромагнитного актюатора 2 через промежуточный шток 4 происходит перемещение силовой ячейки 7 и индентора 15 в направлении тестируемого образца 21.
Во время осуществления процедуры инструментального индентирования предметный столик 20 совершает осциллирующие возвратно-поступательные движения в направлении, совпадающем с направлением движения острия индентора 15. Такой метод непрерывного измерения контактной жесткости, оговоренный в ГОСТ Р 8.748 и ISO 14577, позволяет получать данные о зависимости твердости и модуля Юнга тестируемого материала от глубины погружения индентора.
На рисунках представлены фрагменты сигналов, зарегистрированных емкостным датчиком, измеряющим глубину погружения при работе электромагнитного актюатора 2 на низких 10 Гц (Фиг. 2) и высоких 500 Гц (Фиг. 3) частотах и при возбуждении колебаний активным пьезокерамическим столиком 20 на частоте 500 Гц (Фиг. 4). Из рисунков хорошо видно, что на частоте 500 Гц, для прототипа, сигал DMA крайне мал, и тонет в шумах, при использовании предметного столика 20 в виде пьезокерамической пластины. Отношение сигнал/шум достаточно хорошее и позволяет с высокой точностью оценивать вязкоупругие свойства тестируемого материала.
Предлагаемое техническое решение гарантирует стабильную и не зависящую от частоты амплитуду, и фазы осциллирующего воздействия в диапазоне частот вплоть до десятков кГц, поскольку частота механического толщинного резонанса пьезокерамической пластины предметного столика 20 может быт в диапазоне сотен кГц.
Пример полученной зависимости механических свойств от глубины погружения индентора 15 с использованием активного предметного столика 20 приведен на фиг. 4, где представлена данные о мнимой части модуля Юнга, его действительной части и твердости, как функций глубины погружения. Данные получены на частоте 500 Гц, материал - сталь 36НХТЮ с поверхностным упрочнением от глубины погружения индентора. Для сравнения на фиг. 5 представлены данные полученные на том же измерительном оборудовании, но при подаче сигнала ДМА с частотой 500 Гц не на активный предметный столик 20, а на основной электромагнитный актюатор 2 динамического нанотвердомера. Из представленных данных хорошо видно, что при стандартной схеме испытания без активного предметного столика 20 отношение сигнал/шум является неудовлетворительным и информация о зависимости механических свойств от глубины погружения индентора тонет в шумах.
Возможность использования активного предметного столика 20 в качестве датчика сигналов акустической эмиссии демонстрирует фиг. 3, на нем представлен детектированный сигнал в виде огибающей импульсов ультразвука, возникших при хрупком разрушении материала во время индентирования. Как видно из представленных на фиг. 3 данных факт образования трещин проявляется на кривой нагрузка-глубина в виде скачков глубины погружения и осцилляций положения индентора 15. Эти данные так же, как и сигналы акустической эмиссии указывают на то, что происходило хрупкое разрушение тестируемого материала в области индентирования, однако амплитуда и вид сигнала, фиксируемого рабочим емкостным датчиком динамического наноиндентора, зависит от достаточно большого количества факторов и может быть количественно интерпретирован в терминах энергии выделившейся при хрупком разрушении материала в области индентирования. Сигналы с активного столика 20, работающего в режиме акустического приемника, в этом плане более адекватно описывают хрупкие процессы, происходящие в области индентирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Динамический наноиндентор | 2019 |
|
RU2721020C1 |
| Устройство для измерения параметров рельефа поверхности и механических свойств материалов | 2019 |
|
RU2731039C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ РЕЛЬЕФА ПОВЕРХНОСТИ И МЕХАНИЧЕСКИХ СВОЙСТВ МАТЕРИАЛОВ | 2010 |
|
RU2442131C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ СВОЙСТВ МАТЕРИАЛОВ | 2009 |
|
RU2425356C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ РЕЛЬЕФА ПОВЕРХНОСТИ И МЕХАНИЧЕСКИХ СВОЙСТВ МАТЕРИАЛОВ | 2012 |
|
RU2510009C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ИЗНОСОСТОЙКОСТИ ТВЕРДОСПЛАВНЫХ РЕЖУЩИХ ИНСТРУМЕНТОВ | 2014 |
|
RU2570340C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ИЗНОСОСТОЙКОСТИ ТВЕРДОСПЛАВНЫХ РЕЖУЩИХ ИНСТРУМЕНТОВ | 2014 |
|
RU2569920C1 |
| Устройство для проведения инструментального индентирования с возможностью экспериментального наблюдения области контакта индентора с поверхностью образца в реальном времени | 2022 |
|
RU2796200C1 |
| Способ и устройство для измерения твердости | 1958 |
|
SU123744A1 |
| СПОСОБ СРАВНИТЕЛЬНОЙ ОЦЕНКИ СВОЙСТВ МАТЕРИАЛОВ ПО ПЛОЩАДИ СЛЕДА МАЯТНИКОВОГО СКРАЙБИРОВАНИЯ | 2014 |
|
RU2555207C1 |



Изобретение относится к области использования устройств, осуществляющих измерения механических свойств материалов путем контролируемого по глубине и нагрузке вдавливания твердого наконечника в тестируемый материал. Динамический наноиндентор включает корпус 1, внутри которого закреплены электромагнитный актюатор 2 с подвижной катушкой 3, связанной через промежуточный шток 4, рабочий шток 10 с индентором 15 на его конце, емкостные датчики, между которыми установлена на упругих подвесах 6 и 13 силовая ячейка 7, предметный столик 20 для тестируемого материала 21. Предметный столик 20 выполнен в виде пьезокерамической пластины с металлическими электродами 11 для подачи на пьезокерамическую пластину переменного управляющего электрического напряжения от 0,1 до 100 В и частотой от 0,01 Гц до 100 кГц. Пьезокерамическая пластина выполнена толщиной от 0,1 мм до 10 мм и площадью от 1 см2 до 10 см2 и закреплена на двухкоординатном макропозиционере 16. Технический результат - возможность регистрации сигналов акустической эмиссии и повышение точности измерения твердости и модуля Юнга, вязкоупругих и хрупких свойств тестируемого материала. 4 з.п. ф-лы, 8 ил.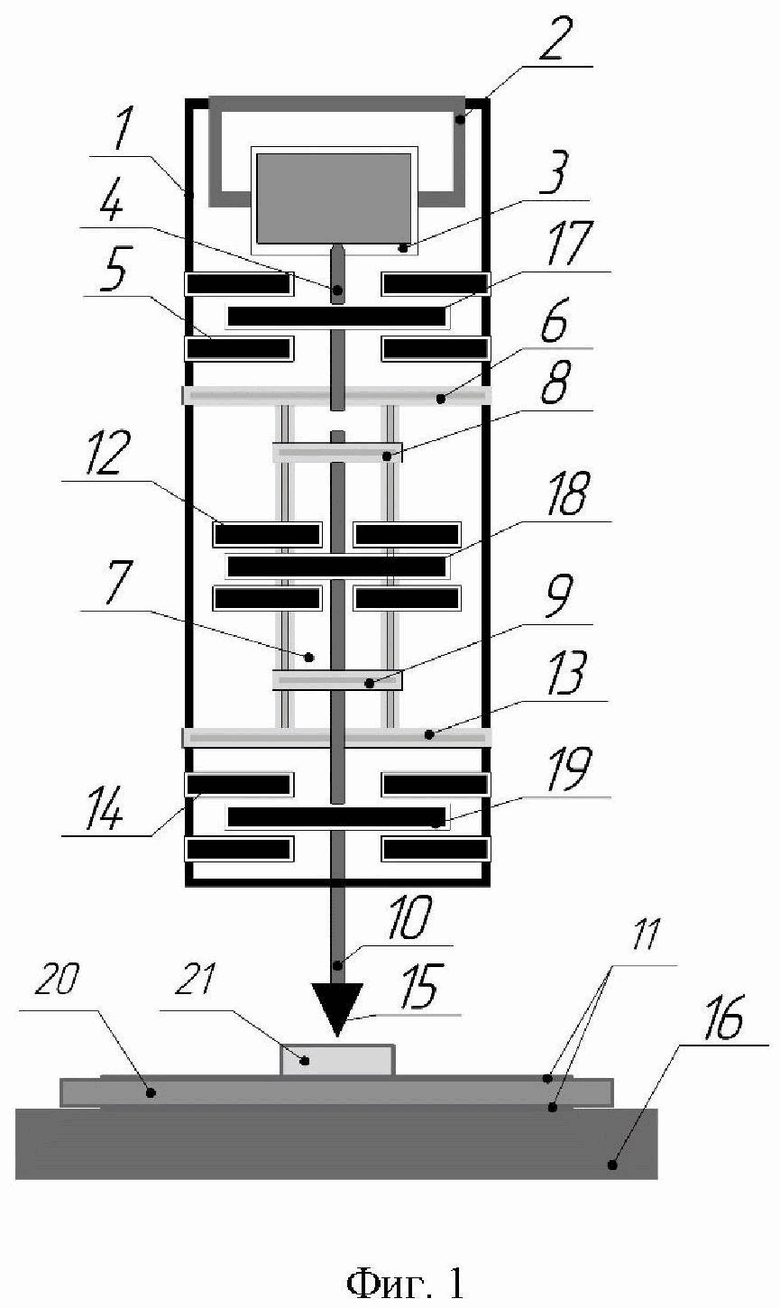
1. Динамический наноиндентор, включающий корпус, внутри которого закреплены электромагнитный актюатор с подвижной катушкой, связанной через шток, промежуточный шток, рабочий шток с индентором на его конце, емкостные датчики, между которыми установлена на упругих подвесах силовая ячейка, предметный столик для тестируемого материала, отличающийся тем, что предметный столик выполнен в виде однородной или многослойной пьезокерамической пластины с металлическими электродами для подачи на пьезокерамическую пластину переменного электрического управляющего напряжения от 0,1 до 100 В и частотой от 0,01 Гц до 100 кГц, при этом пьезокерамическая пластина выполнена толщиной от 0,1 мм до 10 мм и площадью от 1 см2 до 10 см2 и закреплена на двухкоординатном макропозиционере.
2. Динамический наноиндентор по п. 1, отличающийся тем, что металлические электроды расположены на однородной пьезокерамической пластине на ее плоских сторонах.
3. Динамический наноиндентор по п. 1, отличающийся тем, что многослойная пьезокерамическая пластина выполнена в виде сборки, состоявшей из чередующихся слоев пьезокерамики, поляризованных во встречно противоположных направлениях.
4. Динамический наноиндентор по пп. 1 и 3, отличающийся тем, что металлические электроды на многослойной пьезокерамической пластине закреплены на границе раздела слоев и на ее внешних плоских поверхностях.
5. Динамический наноиндентор по п. 1, отличающийся тем, что металлические электроды выполнены с возможностью их подключения к усилителю электрических сигналов и далее к аналого-цифровому преобразователю для последующего преобразования сигналов акустической эмиссии в цифровой код.
| Устройство для измерения параметров рельефа поверхности и механических свойств материалов | 2019 |
|
RU2731039C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ РЕЛЬЕФА ПОВЕРХНОСТИ И МЕХАНИЧЕСКИХ СВОЙСТВ МАТЕРИАЛОВ | 2010 |
|
RU2442131C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК МОДИФИЦИРОВАННОГО ПОВЕРХНОСТНОГО СЛОЯ МАТЕРИАЛА ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2646442C1 |
| Коньки | 1950 |
|
SU86936A1 |
| Охладитель агломерата | 2015 |
|
RU2684007C2 |
| CN 110455656 A, 15.11.2019. | |||

