Изобретение относится к области устройств, осуществляющих измерения механических свойств материалов путем контролируемого по глубине и нагрузке вдавливания твердого наконечника в тестируемый материал, и может использоваться в микротвердомерах и нанотвердомерах.
При измерении твердости с помощью микротвердомеров и устройств, производящих измерения методом инструментального индентирования, твердость определяется как отношение нагрузки к площади остаточного отпечатка. В микротвердомерах измерение данной площади производится с использованием оптических микроскопов, а в инструментальных твердомерах – на основе анализа диаграммы нагрузка-глубина при внедрении индентора в материал и последующего его извлечения.
Твердомеры, осуществляющие измерения механических свойств при малых нагрузках, существенно меньших 200 мН (нанотвердомеры), предоставляют возможность измерения твердости и модуля упругости локальных областей образца размером менее 10мкм. Микротвердомеры обычно работают при нагрузках индентирования больше 100мН и позволяют определять только локальную твердость образца, не имея возможности для измерения значения модуля упругости тестируемого материала. Измерения твердости в микротвердомерах проводятся на основе данных о силе вдавливания и площади остаточного отпечатка, полученной оптическим или иным способом.
Как правило, те усилия, при которых происходит измерение твердости в микротвердомерах, на несколько порядков превосходят те рабочие усилия, которые используются в нанотвердомерах. Для микротвердомеров типичной является максимальная нагрузка в 600Н, а минимальная – 50 мН. При этом верхняя граница, доступная ряду приборов, работающих в соответствии с методом инструментального индентирования, оказывается выше нижней границы нагрузок для микротвердомеров, то есть диапазоны доступных нагрузок перекрываются. У приборов, использующих метод инструментального индентирования и предназначенных для работы в нано диапазоне, максимальная нагрузка не превышает 50 мН. Для приборов, захватывающих более широкий диапазон нагрузок, максимальное усилие существенно больше, например, у прибора НаноСкан 4Д максимальная нагрузка равна 1Н.
Классическая конструкция нанотвердомера использующего метод инструментального индентирования (https://www.kla-tencor.com/documents/KLA_Brochure_NI-G200.pdf), принятая за прототип, состоит из пяти базовых элементов – жесткого корпуса, в котором расположены подвижные элементы, механического актюатора, преобразующего входное электрическое воздействие в линейное перемещение и нагрузочное усилие, жесткого штока с индентором на конце, соединенного с актюатором, упругой системы подвеса штока и емкостного датчика, фиксирующего перемещение штока по отношению к жесткому корпусу прибора и состоявшего из одной подвижной и двух неподвижных токопроводящих пластин. Такая конфигурация позволяет осуществлять инструментальное индентирование строго в соответствии с существующими стандартами (ГОСТ Р 8.748 и ISO 14577) в широком диапазоне рабочих нагрузок и глубин погружения индентора в материал.
Основным недостатком такой одноступенчатой схемы осуществления метода инструментального индентирования является противоречие между низкой силовой нагрузкой и большим ходом штока. Для осуществления индентирования мягких материалов нужно иметь возможность осуществлять индентирование при большой глубине вдавливания (до 100мкм) с минимальной нагрузкой (не более 100мН). Это сочетание приводит к крайне низкому значению коэффициента упругости подвеса индентора. Для приведенных нагрузок и перемещений коэффициент упругости подвеса K оказывается всего 1000 Н/м, что для типичной массы подвижной системы m=10 г приводит к резонансной частоте системы подвеса fr~50 Гц.
Особенно сильно этот недостаток проявляется при работе с биологическими и полимерными материалами, когда необходимо обеспечивать измерения малых сил (в диапазоне 1 мкН – 1 мН) при значительных перемещениях (в диапазоне 100нм – 100мкм). Оптимальный коэффициент упругости повеса падает до 100 Н/м. В этом случае даже при уменьшении массы подвижной части наноиндентора до m=1 г резонансная частота fr оказывается меньше 100 Гц.
Такое низкое значение резонансной частоты вместе со значительной величиной подвижной массы, связанной с индентором, приводит к необходимости использования многоуровневых систем виброизоляции, понижающих уровень сейсмического воздействия, до такого при котором уровень избыточного шума по силе оказывается существенно меньше 1мкН. Для всех приборов использующих метод инструментального индентирования характерным свойством является зависимость минимально достижимого уровня нагрузок при индентировании от сейсмической обстановки в месте расположения прибора. Так при массе системы подвеса индентора m=1 г и типичном для города уровне сейсмического шума 100 мкм/с2 уровень вибрационного шума по силе оказывается порядка 1 мкН, а по смещению 10 нм. Что неприемлемо для нанотвердомеров.
При использовании виброизолирующих платформ с частотой нижнего резонанса fv в районе нескольких Гц удается ослабить уровень сейсмического воздействия на два порядка (в 100 раз) если резонансная частота системы подвеса fr будет, хотя бы в 10 раз превышать резонансную частоту fv системы виброизоляции. В общем случае ослабление сейсмического воздействия в диапазоне частот от fv до fr пропорционально (fr/ fv)2 и оно тем больше чем выше резонансная частота системы подвеса индентора (https://www.ntmdt-si.ru/data/media/files/brochures/osnovy_skaniruyushcej_zondovoj_mikroskopii.pdf)
Еще одним существенным недостатком известного устройства является невозможность проведения прецизионных измерений вязкоупругих характеристик материалов в широком диапазоне частот колебаний индентора из-за неполного контроля взаимного перемещения всех элементов конструкции наноиндентора и низкой частоты основного резонанса системы подвеса индентора. Типичная резонансная частота fr системы подвеса индентора находится в диапазоне (20-200) Гц, и в результате область частот, на которых возможно количественное измерение вязкоупругих свойств при малых нагрузках, ограничена величиной fr.
При работе с большими статическими прижимами, когда итоговая резонансная частота индентора из-за влияния жесткости области контакта, существенно возрастает и становится выше fr, кроме основного резонанса системы подвеса, проявляется ряд паразитных резонансов – изгибные резонансы штока и обкладок конденсатора, являющегося емкостным датчиком перемещения, а также резонансы отдельных элементов мембран, используемых для подвеса штока.
Толстая подвижная обкладка емкостного датчика увеличивает массу подвижной системы индентора и уменьшает fr. Изготовление обкладки в виде тонкой токопроводящей пластинки понижает частоту ее резонансных изгибных колебаний и это сказывается на возможности количественных динамических измерений на частотах, близких и больших данного паразитного резонанса.
При стандартной компоновке, когда подвижная катушка атюатора непосредственно соединена с помощью жесткого штока с индетором и емкостным датчиком перемещения невозможно точно проконтролировать колебательную составляющую при движении штока с емкостным датчиком катушкой актюатора и индентором.
Дополнительным фактором, затрудняющим учет паразитных резонансных явлений при стандартной компоновке, является то обстоятельство, что при значительных амплитудах осциллирующей компоненты в движении индентора, становится существенным нелинейный характер зависимости силы реакции материала на осциллирующее перемещение индентора и движение индентора перестает быть синусоидальным. Наличие прямого канала измеряющего силу прижима в этом случае существенно повышает точность контроля сил, возникающих в области контакта индентора с исследуемым материалом.
Проблемой изобретения является разработка динамического наноиндентора с облегченной системой подвеса индентора, прецизионным контролем силы прижима и полным метрологическим контролем параметров колебательной системы наноиндентора, то есть перемещений и сил, возникающих между различными элементами системы при реализации режимов инструментального индентирования.
Техническим результатом изобретения является расширение функциональных возможностей динамического наноиндентора, за счет возможности измерения механических свойств, в том числе вязкоупругих, широкого спектра материалов, в том числе полимерных и биологических, за счет увеличения чувствительности устройства к силе, возникающей в области контакта индентора с образцом, прямого измерения глубины погружения индентора и отсутствию влияния свободного хода штока на сигнал силовой ячейки.
Поставленная проблема и указанный технический результат достигаются тем, что динамический наноиндентор включает корпус прибора с закрепленным на нем актюатором с подвижной катушкой, связанной со штоком, емкостный датчик и индентор, смонтированный на свободном конце штока. Согласно изобретению, динамический наноиндентор дополнительно снабжен силовой ячейкой, закрепленной внутри корпуса прибора на упругих подвесах, к верхней части которой прикреплен промежуточный подвижный шток, связанный с подвижной катушкой актюатора и с емкостным датчиком актюатора, подвижная обкладка которого закреплена на промежуточном подвижном штоке, для измерения перемещения корпуса силовой ячейки по отношению к корпусу прибора. Внутри корпуса силовой ячейки смонтированы гибкие мембраны, на которых, соосно промежуточному штоку, закреплен рабочий шток с индентором на конце и емкостный датчик силы, производящий измерения приложенной силы на основании измерений перемещения рабочего штока по отношению к корпусу силовой ячейки. Под нижним упругим подвесом размещен емкостный датчик, для измерения величины перемещения рабочего штока по отношению к корпусу прибора и определения глубины погружения индентора в тестируемый материал. Обкладки емкостного датчика силы и емкостного датчика глубины перемещения закреплены на подвижном рабочем штоке.
Коэффициент упругости подвеса силовой ячейки должен быть от 10 до 1000 раз, превышающим коэффициент упругости подвеса рабочего штока в силовой ячейке. Масса рабочего штока должна быть от 10 до 100 меньше массы силовой ячейки и катушки актюатора, так чтобы резонансная частота fr1 системы подвеса силовой ячейки была бы от 10 до 100 раз больше резонансной частотой fr2 системы, включающей шток с индентором и гибкие мембраны силовой ячейки.
В качестве всех трех емкостных датчиков преимущественно используются дифференциальные конденсаторы с подвижной средней обкладкой.
В качестве всех трех емкостных датчиков могут использоваться как дифференциальные конденсаторы с подвижной средней обкладкой, так и простые емкостные датчики с двумя обкладками – одной подвижной, другой неподвижной. Однако использование дифференциальных конденсаторов предпочтительней, так как они позволяют не только повысить чувствительность емкостного датчика, но и существенно повышают линейность преобразования смещения в регистрируемую емкость.
Динамический наноиндентор является прибором для осуществления инструментального индентирования с возможностью контроля динамических характеристик системы подвеса индентора в полосе частот, существенно превышающей частоту основного резонанса системы подвеса индентора. Прецизионный контроль фазы и амплитуды вынужденных колебаний индентора становится возможен благодаря совместной обработке сигналов с трех емкостных датчиков, контролирующих перемещение всех основных механических элементов, участвующих в колебательном процессе. При традиционном подходе, когда контролируют только амплитуды и фазы силы, генерируемой актюатором, перемещения штока относительно корпуса прибора или деформация силовой ячейки, учет влияния разного рода паразитных резонансов, присутствующих в конструкции прибора, становится затруднительным.
Установка в корпусе прибора силовой ячейки, соединенной с подвижной катушкой актюатора через промежуточный шток, позволяет повысить резонансную частоту системы подвеса индентора и точность контроля силы прижима, а также гибко регулировать рабочий диапазон по силе внедрения динамического наноиндентора. Высокое значение резонансной частоты подвеса силовой ячейки делает несущественным влияние сейсмических шумов и повышает эффективность работы системы виброизоляции прибора.
Выполнение силовой ячейки в виде жесткого корпуса с расположенными внутри гибкими мембранами, на которых закреплен рабочий шток с индентором, облегчает перемещение штока внутри силовой ячейки вдоль своей оси за счет упругости мембран и позволяет осуществления процедуры инструментального индентирования, как мягких, так и твердых материалов. Использование гибких стальных мембран силовой ячейки с малым значением коэффициент упругости (например, 100 Н/м), позволяет при использовании стальной системы подвеса силовой ячейки с высоким коэффициентом упругости (например, 10000Н/м) и обычных актюаторов, работающих с нагрузками до 1Н и перемещениями до 1мм, реализовывать динамический наноиндентор с рабочим диапазоном усилий до 50 мН и глубин индентирования до 100мкм за счет использования силовой ячейки в качестве механического трансформатора, переводящего рабочее макроскопическое перемещение актюатора в микроскопическую силу прижима индентора к поверхности исследуемого материала.
Установка внутри корпуса прибора трех емкостных датчиков с возможностью фиксирования глубины погружения, силы прижима и перемещения силовой ячейки, обеспечивает полный контроль сложной колебательной системы, входящей в состав устройства для осуществления инструментального индентирования, с возможностью контроля динамических характеристик системы подвеса индентора и вычленения вязкоупругих сил, возникающих в области взаимодействия индентора с тестируемым материалом. Такая возможность крайне важна при проведении быстрых множественных уколов и осуществлении динамического индентирования, когда на поступательное движение индентора накладывается знакопеременное осциллирующее воздействие. Наличие трех емкостных датчиков позволяет гибко управлять поведением актюатора, управляя движением силовой ячейки, путем измерения перемещения силовой ячейки по отношению к корпусу устройства. Добавление емкостного датчика с возможностью измерения перемещения силовой ячейки в состав наноиндентора позволяет полностью описать поведение двух резонансных колебательных систем данного наноиндентора и гибко управлять характером кривой нагружения и разгрузки, реализуя тем самым разнообразные динамические режимы инструментального индентирования.
Соединение рабочего штока с индентором на конце через промежуточный шток и силовую ячейку с актюатором, позволяет механически развязать такие тяжелые элементы как катушка актюатора, упругие мембраны, удерживающие силовую ячейку и корпус силовой ячейки от штока с индентором, закрепленного на гибких упругих элементах силовой ячейки.
Подвижная система данного прибора, предназначенного для осуществления процедуры инструментального индентирования, может быть представлена в виде двух связанных между собой колебательных систем – системы подвеса силовой ячейки с резонансной частотой fr1 и системы, состоящей из штока с индентором и гибких мембран силовой ячейки, с резонансной частотой fr2. При этом если коэффициент упругости подвеса силовой ячейки будет превышать коэффициент упругости подвеса рабочего штока хотя бы в 10 раз, а масса рабочего штока с индентором будет в 10 раз меньше массы силовой ячейки вместе с дополнительным штоком и катушкой актюатора то это приведет к десятикратному различию в резонансных частотах fr1/fr2=10 и существенно, на порядок, расширит частотный диапазон в котором возможно осуществление динамических измерений. Возможность повышения коэффициента упругости силовой ячейки в 100 и более раз позволяет в пропорциональное число раз повысить рабочий коэффициент упругости системы удержания рабочего штока с индентором и тем самым повысить быстродействие прибора и его сейсмическую защищенность. Предлагаемое видоизменение конструкции (введение силовой ячейки) позволяет изготавливать нанотвердомеры с резонансной частотой повеса рабочего штока больше 300 Гц при сохранении высокого разрешения, как по силе, так и по глубине индентирования. При этом резонансная частота подвеса силовой ячейки fr1 может быть от 10 до 100 раз выше резонансной частоты подвеса рабочего штока с индентором fr2, что позитивно сказывается на точности динамических измерений методом инструментального индентирования.
Приведенный диапазон коэффициентов упругости подвесов силовой ячейки рабочего штока, а также масс ячейки и штока являются иллюстративными. Ключевой характеристикой рассматриваемого динамического наноиндентора является возможность контроля всех сил и перемещений, возникающих в процессе функционирования прибора и возможность разнесения по частоте более чем в десять раз резонансной частоты системы подвеса рабочего штока с индентором, а также системы крепления силовой ячейки и рабочей катушки актюатора. Такое разнесение резонансных частот создает условия для количественного измерения динамических характеристик тестируемых материалов. Дополнительным эффектом от использования мягкой силовой ячейки является возможность работы с биологическими и полимерными материалами, требующими возможности измерения малых сил при больших перемещениях.
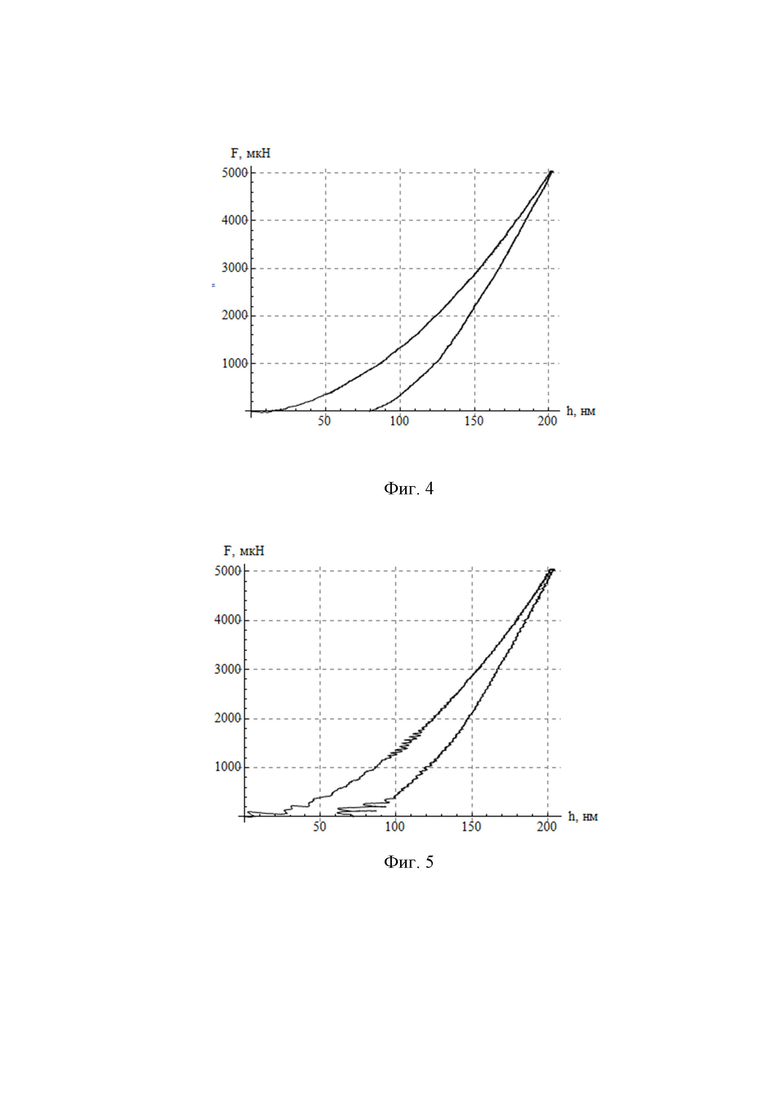
Изобретение поясняется чертежами, где на фиг. 1 представлена общая схема наноиндентора, на фиг. 2 – иллюстрируется работа макета динамического наноиндентора с силовой ячейкой; на фиг. 3 – кривая работы стандартной конфигурации наноиндентора НаноСкан 4Д, на фиг. 4 – представлена кривая нагрузка – разгрузка при индентировании силиконового образца с помощью макета динамического наноиндентора, на фиг. 5 - кривая нагрузка – разгрузка при индентировании силиконового образца с помощью стандартной конфигурации наноиндентора НаноСкан 4Д.
Динамический наноиндентор включает корпус прибора 1 с закрепленным на нем актюатором 2 с подвижной катушкой 3, связанной с промежуточным подвижным штоком 4, взаимодействующим с емкостным датчиком 5 актюатора 2. Внутри корпуса прибора 1, под емкостным датчиком 5 на верхнем упругом подвесе 6 закреплена силовая ячейка 7. Верхний упругий подвес 6 соединен с промежуточным штоком 4. Внутри корпуса силовой ячейки 7 смонтированы гибкие мембраны 8 и 9, на которых соосно промежуточному штоку 4 закреплен рабочий подвижный шток 10 с индентором 11 на конце. Внутри силовой ячейки 7 расположен емкостный датчик 12 силы прижима, взаимодействующий с рабочим штоком 10. Под нижним упругим подвесом 13 закреплен емкостный датчик 14 для измерения глубины погружения индентора 15 в тестируемый материал 16.
Емкостный датчик 5 актюатора 2, снабжен обкладкой 17, закрепленной на промежуточном подвижном штоке 4. Датчик 12 силы прижимы снабжен обкладкой 18, а датчик 14 фиксирования глубины погружения снабжен обкладкой 19, при этом обкладки 18 и 19 закреплены на рабочем подвижном штоке 10.
Динамический наноиндентор работает следующим образом.
Исследуемый полимерный образец 16 помещают под динамическим наноиндентором. При осуществлении нагружения и разгрузки под действием актюатора 2 через промежуточный жесткий шток 4 (изготовленный, например, из карбонового или стального стержня) с коэффициентом жесткости (104-107Н/м) происходит перемещение силовой ячейки 7 и индентора 15 в направлении тестируемого материала 16. После механического контакта индентора 15, закрепленного на рабочем жестком штоке 10, коэффициент жесткости 104-107Н/м (изготовленный из карбонового или стального стержня) с поверхностью образца 16 происходит деформация силовой ячейки 7 и, таким образом, с помощью емкостного датчика 18 осуществляют контроль силы перемещения индентора 15 во время процесса инструментального индентирования. Сигнал с нижнего емкостного датчика 19 при этом используется для измерения глубины погружения индентора в материал. Сигнал с верхнего емкостного датчика 17 используется для контроля перемещения корпуса силовой ячейки.
Примеры временной развертки силы прижима как функции времени иллюстрируются на графиках (фиг. 2 и 3), где фиг. 3 соответствует работе макета Динамического наноиндентора с силовой ячейкой, а на фиг. 4 - стандартной конфигурации наноиндентора НаноСкан 4Д. Хорошо видно, что после разгрузки сигнал с силовой ячейки возвращается к нулевому значению. Для традиционного наноиндентора, где для определения силы прижима из усилия актюатора вычитается сила упругого сопротивления мембран подвеса не происходит полного возвращения в ноль силы прижима, что приводит к ошибкам в определении упругих и вязкоупругих свойств тестируемого материала. Такого рода не возврат силы в ноль обусловлен широким кругом факторов, среди которых первое место занимает прогрев катушки актюатора и элементов упругого подвеса в ходе индентирования.
Использование силовой ячейки устраняет такого рода эффекты и повышает точность измерения силы взаимодействия индентора с материалом.
Не возвращение силы прижима в ноль после разгрузки – характерная особенность стандартных наноинденторов.
Влияние факторов, связанных с вибрационным воздействием на систему подвеса индентра, ярко иллюстрируют кривые нагрузка - разгрузка полученные при индентировании силиконового образца. На фиг. 4 представлена кривая с помощью макета Динамического наноиндентора с силовой ячейкой, а на фиг. 5 – с помощью стандартной конфигурации наноиндентора НаноСкан 4Д.
Осцилляции на кривой нагрузки и разгрузки, вызванные виброшумами, искажают измерительную информацию и приводят к ошибкам в измерении твердости и модуля юнга тестируемого материала.
Снятие кривых осуществлялось с выключенной системой виброизоляции. Полученные данные подтверждают изложенные выше соображения об уменьшении сейсмической чувствительности динамического наноиндентора благодаря уменьшению массы подвижной системы с индентором и повышению резонансных частот всех упругих подвесов, как силовой ячейки, так и индентора.
Согласно алгоритму обработки данных, описанному в ГОСТ Р 8.748 и ISO 14577, на основании кривых нагрузки и разгрузки рассчитываются значения твердости и модуля Юнга материала. Данные расчеты опираются на форму данных кривых и используют априорную информацию о зависимости контактной площади индентора от глубины его погружения в материал. При этом функция площади определяется на основании множественных индентов в тестовый материал с известной твердостью и модулем Юнга (как правило, плавленый кварц) и их обработке по алгоритму, предусмотренному инструментальным индентированием. Однозначно можно говорить, что минимальный диапазон рабочих нагрузок напрямую обусловлен уровнем шумов в канале измерения силы и перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Динамический наноиндентор | 2023 |
|
RU2811668C1 |
| Устройство для измерения параметров рельефа поверхности и механических свойств материалов | 2019 |
|
RU2731039C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ РЕЛЬЕФА ПОВЕРХНОСТИ И МЕХАНИЧЕСКИХ СВОЙСТВ МАТЕРИАЛОВ | 2010 |
|
RU2442131C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ РЕЛЬЕФА ПОВЕРХНОСТИ И МЕХАНИЧЕСКИХ СВОЙСТВ МАТЕРИАЛОВ | 2012 |
|
RU2510009C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ СВОЙСТВ МАТЕРИАЛОВ | 2009 |
|
RU2425356C1 |
| Устройство для проведения инструментального индентирования с возможностью экспериментального наблюдения области контакта индентора с поверхностью образца в реальном времени | 2022 |
|
RU2796200C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ИЗНОСОСТОЙКОСТИ ТВЕРДОСПЛАВНЫХ РЕЖУЩИХ ИНСТРУМЕНТОВ | 2014 |
|
RU2570340C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ИЗНОСОСТОЙКОСТИ ТВЕРДОСПЛАВНЫХ РЕЖУЩИХ ИНСТРУМЕНТОВ | 2014 |
|
RU2569920C1 |
| Индентор-объектив | 2018 |
|
RU2680853C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ МАТЕРИАЛА В НАСЫПНОМ ВИДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2475722C2 |


Использование: для измерения механических свойств материалов. Сущность изобретения заключается в том, что динамический наноиндентор включает корпус прибора с закрепленным на нем актюатором с подвижной катушкой, связанной со штоком, емкостный датчик и индентор, смонтированный на свободном конце штока, дополнительно снабжен силовой ячейкой, закрепленной внутри корпуса прибора на упругих подвесах, к верхней части которой прикреплен промежуточный подвижный шток, связанный с подвижной катушкой актюатора и с емкостным датчиком актюатора, подвижная обкладка которого закреплена на промежуточном подвижном штоке, для измерения перемещения корпуса силовой ячейки по отношению к корпусу прибора, внутри корпуса силовой ячейки смонтированы гибкие мембраны, на которых, соосно промежуточному штоку, закреплен рабочий шток с индентором на конце и емкостный датчик силы, производящий измерения приложенной силы на основании измерений перемещения рабочего штока 10 по отношению к корпусу силовой ячейки 7. Под нижним упругим подвесом размещен емкостный датчик, для измерения величины перемещения рабочего штока по отношению к корпусу прибора и определения глубины погружения индентора в тестируемый материал, обкладки и емкостного датчика силы и емкостного датчика глубины перемещения закреплены на подвижном рабочем штоке. Технический результат: обеспечение возможности расширения функциональных возможностей динамического наноиндентора. 2 з.п. ф-лы, 5 ил.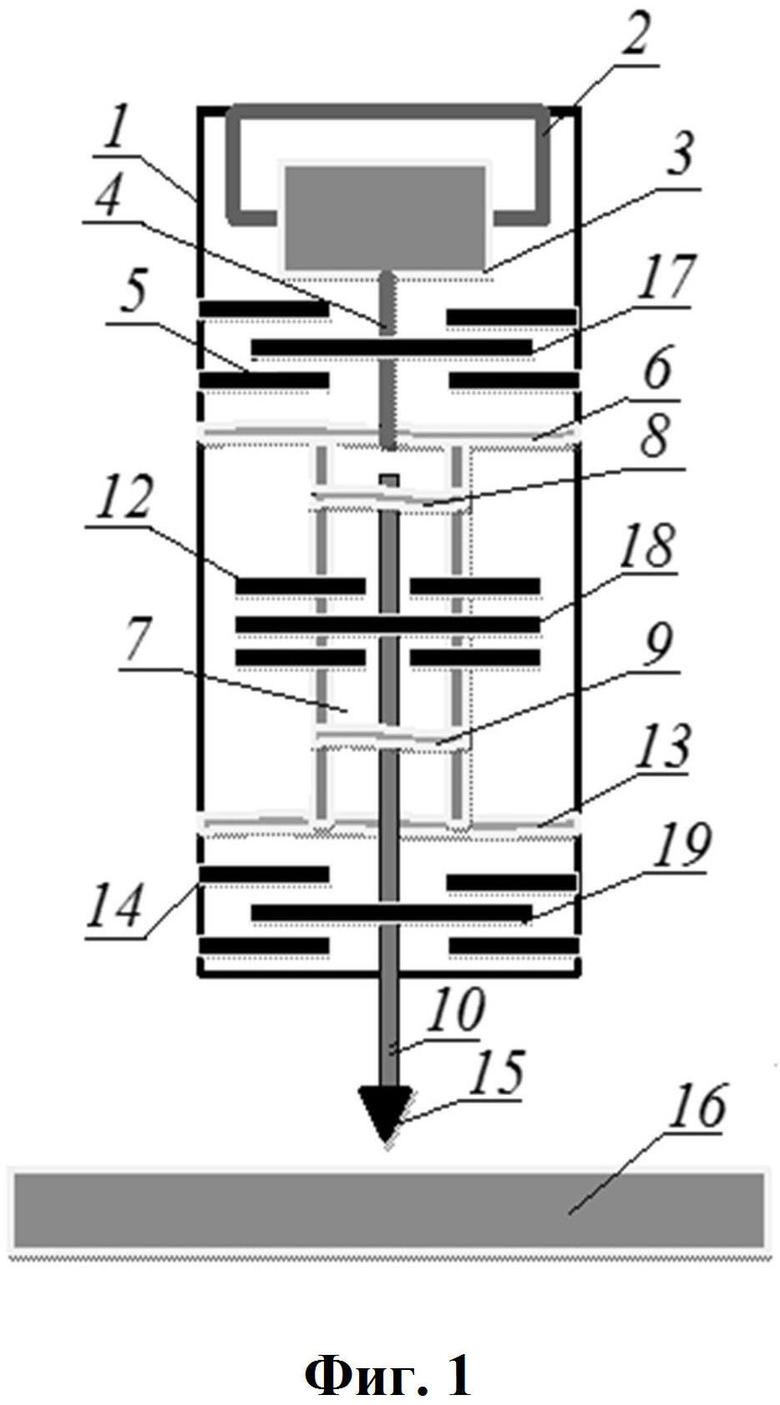
1. Динамический наноиндентор, включающий корпус прибора с закрепленным на нем актюатором с подвижной катушкой, связанной со штоком, емкостный датчик и индентор, смонтированный на свободном конце штока, отличающийся тем, что он дополнительно снабжен силовой ячейкой, закрепленной внутри корпуса прибора на упругих подвесах, к верхней части которой прикреплен промежуточный подвижный шток, связанный с подвижной катушкой актюатора и с емкостным датчиком актюатора, подвижная обкладка которого закреплена на промежуточном подвижном штоке, для измерения перемещения корпуса силовой ячейки по отношению к корпусу прибора, внутри корпуса силовой ячейки смонтированы гибкие мембраны, на которых, соосно промежуточному штоку, закреплен рабочий шток с индентором на конце и емкостный датчик силы, осуществляющий измерения приложенной силы на основании измерения перемещения рабочего штока по отношению к корпусу силовой ячейки, а под нижним упругим подвесом размещен емкостный датчик, для измерения величины перемещения рабочего штока по отношению к корпусу прибора и определения глубины погружения индентора в тестируемый материал, при этом подвижные обкладки емкостного датчика силы и емкостного датчика глубины перемещения закреплены на подвижном рабочем штоке.
2. Динамический наноиндентор по п. 1, отличающийся тем, что коэффициент упругости подвеса силовой ячейки от 10 до 1000 раз превышает коэффициент упругости подвеса рабочего штока в силовой ячейке, а масса рабочего штока от 10 до 100 меньше массы силовой ячейки и катушки актюатора, так чтобы резонансная частота Fr1 системы подвеса силовой ячейки была от 10 до 100 раз больше резонансной частотой Fr2 системы, включающей шток с индентором и гибкие мембраны силовой ячейки.
3. Динамический наноиндентор по п. 1, отличающийся тем, что в качестве всех трех емкостных датчиков используют дифференциальные конденсаторы с подвижной средней обкладкой.
| Способ стабилизации потребляемой мощности генератора при высокочастотной закалке металлических изделий | 1958 |
|
SU122177A3 |
| Устройство защиты для предупреждения несчастных случаев при обрыве проводов высоковольтных линий передачи радиовещания | 1952 |
|
SU96428A1 |
| JP 2010014404 A, 21.01.2010 | |||
| WO 2010087889 A1, 05.08.2010 | |||
| KR 1020090047387 A, 12.05.2009 | |||
| US 8453498 B2, 04.06.2013. | |||

