Область техники, к которой относится изобретение
Изобретение относится к автомобилестроению, в частности, к способам и устройствам активной безопасности составных транспортных средств (ТС), а именно автопоездов.
Уровень техники
Известно устройство для оценки коэффициента трения скольжения колес с дорогой и способ оценки коэффициента трения колес с дорогой, в котором коэффициент трения скольжения колес с дорогой определяется на основе отношения расчетной силы поворота к расчетному углу бокового скольжения шины. Транспортное средство движется по нескольким дорожным поверхностям, которые отличаются коэффициентом трения колес с дорогой, а углы бокового скольжения шин и силы поворота на дорожных поверхностях определяются заранее. Блок оценки коэффициента трения хранит в памяти корреляцию между обнаруженными углами бокового скольжения шины, обнаруженными силами поворота и коэффициентами трения дороги в виде числовых значений или математического выражения и оценивает коэффициент трения дороги, используя корреляцию, хранящуюся в памяти (см. патент ЕС ЕР2572947А1, заявитель JTEKT Corp, опубл. 26.10.2016).
Основным недостатком устройства является недостаточная точность определения значения коэффициента трения скольжения колес ТС, сложность конструкции и процедуры обработки данных с датчиков ТС и ограниченность применимости только в условиях неоднородности дорожного покрытия.
Известно устройство для определения коэффициента трения скольжения колес ТС на основе базы данных, в котором информация о текущем коэффициенте трения скольжения колес, геометрических особенностях участка, координатах и времени принимается от других ТС в виде базы данных (см. заявку на патент США US20170357669A1, заявитель Robert Bosch GmbH, опубл. 14.12.2017).
Основным недостатком устройства является необходимость наличия приемно-передающих средств в транспортных средствах, значительный объем полученной и переданной информации и проблемным является вопрос об актуальности передаваемой от других ТС информации.
Известно устройство для определения коэффициента трения дорожного покрытия. В нем коэффициенты трения колес определяются при пересчете частот вращения колес от ABS-датчиков в скорости скольжений колес и другие величины, необходимые для расчета коэффициентов трения скольжения каждого из колес. Средний коэффициент трения определяется при использовании весовой функции для коэффициентов трения всех колес. (см. патент Японии JP4159811B2, заявители Koji Takao и BRIDGESTONE CORP, опубл. 01.10.2008).
Недостатком устройства и способа его работы является неопределенность выбора весового коэффициента для каждого из усредненных значений итогового коэффициента трения скольжения ТС.
Известна группа изобретений, относящаяся к системе автопоезда в составе автомобиля и прицепа для помощи водителю при движении автомобиля с прицепом задним ходом. Адаптивная система помощи водителя при движении задним ходом автопоезда включает датчик угла сцепки, датчик угла поворота рулевых колес автомобиля, модуль ввода данных и контроллер. Модуль ввода данных используется для задания водителем требуемого балансировочного угла сцепки с учетом не превышения угла складывания и коэффициента усиления закона управления также со своим ограничением. Контроллер содержит регулятор угла сцепки, который на основе измеренных значений углов сцепки и поворота рулевых колес автомобиля формирует закон управления рулевыми колесами автомобиля и который без использования сигнала о скорости движения формирует закон отклонения рулевых колес автомобиля и ограничение задаваемых сигналов на основе полученных оценок, исполнительное устройство, отклоняющее рулевые колеса автомобиля по сигналам регулятора угла сцепки, и идентификатор для получения оценок кинематических параметров математической модели объекта управления «автомобиль-прицеп». (См. патент РФ RU 2702199 С2, заявитель Федеральное государственное бюджетное образовательное учреждение высшего образования "Иркутский государственный университет путей сообщения" (ФГБОУ ВО ИрГУПС), опубл. 04.10.2019. Бюл. №28). С помощью данной группы изобретений достигается создание системы помощи водителя автопоезда с автонастройкой и/или адаптивной в текущем времени системы управления с использованием принципа управления по заданному балансировочному углу сцепки.
Однако, в данном техническом решении не измеряется и не учитывается коэффициент трения скольжения колес прицепа, учет которого необходим для обеспечения безопасного управления движением автопоезда.
Наиболее близким по технической сущности является система, реализующая способ идентификации максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа в составе системы управления движением автопоезда, которая содержит датчики частот вращения колес автомобиля, электрически связанные с микроконтроллерным устройством обработки информации автомобиля, посредством линий связи с устройством сопряжения с микроконтроллерным устройством, микроконтроллерное устройство обработки информации включает блок анализа сигналов датчиков частот вращения колес автомобиля, блок оценивания параметров движения автомобиля, блок вычисления нормальных составляющих динамических нагрузок, действующих на каждое колесо автомобиля, блок вычисления распределения тягово-тормозных сил, действующих на каждое колесо автомобиля, блок решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения колес автомобиля, блок фильтрации оценок максимальных значений коэффициентов трения скольжения колес автомобиля, причем в системе блок вычисления нормальных составляющих динамических нагрузок, блок вычисления распределения тягово-тормозных сил, блок решения обратной задачи, блок фильтрации, выполнены на базе микроконтроллерного устройства с возможностью программного исполнения блока вычисления нормальных составляющих динамических нагрузок, блока распределения тягово-тормозных сил, блока решения обратной задачи, блока фильтрации, а блок вычисления нормальных составляющих динамических нагрузок, действующих на каждое колесо, выполнен с возможностью учета влияния продольного и поперечного ускорений на распределение нормальных составляющих динамических нагрузок, блок распределения тягово-тормозных сил выполнен с возможностью учета распределения тяговых сил от двигателя и трансмиссии и от тормозной системы по колесам, блок решения обратной задачи выполнен с возможностью формирования оценок максимальных значений коэффициентов трения скольжения колес в диапазоне скольжений устойчивого участка типовой зависимости силы трения от скольжения, блок фильтрации оценок выполнен с возможностью снижения влияния шумов измерений на результаты идентификации за счет устранения выбросов данных в результате проверки по диапазонам и гладкости данных, удовлетворяющих условиям ограничений по первой и второй производным (См. патент РФ RU 2779538, заявитель Федеральное государственное унитарное предприятие "Центральный ордена Трудового Красного Знамени научно-исследовательский автомобильный и автомоторный институт "НАМИ" (ФГУП "НАМИ"), опубл. 08.09.2022). Данное устройство принято за прототип настоящего изобретения.
Однако недостатком и данного известного устройства, в котором производится идентификация максимальных значений коэффициентов трения скольжения колес транспортного средства, является отсутствие возможности определения с его помощью максимального значения коэффициента трения скольжения колес прицепа автопоезда.
Идентификация данного параметра не только у автомобиля автопоезда, но и у прицепа, и последующее сравнение максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа позволяет более точно рассчитать окончательные выходные данные, передаваемые на средство визуального отображения информации водителя и на внешние блоки управления движением автопоезда для использования в качестве входных данных для внешних блоков управления движением автопоезда с целью обеспечения большей безопасности управления движением автопоезда, которую невозможно достигнуть без учета максимальных значений коэффициентов трения скольжения колес прицепа, механически связанного с автомобилем в составе автопоезда и движущихся в общем случае в отличающихся дорожных условиях.
Таким образом, дополнительная идентификация данного параметра у прицепа необходима для обеспечения более безопасного управления тягой, тормозами, рулем автопоезда в составе автомобиля и прицепа.
Раскрытие сущности изобретения
Техническая задача, на решение которой направлено предлагаемое изобретение, состоит в повышении эффективности работы, в устойчивости работы в различных погодных и дорожных условиях и в снижении энергопотребления системы активной безопасности автопоезда путем разработки устройства, в котором с применением способа косвенных измерений максимальных значений коэффициентов трения скольжения колес отдельно для автомобиля и для прицепа в системе управления движением автопоезда, производят идентификацию перечисленных численных значений коэффициентов, сравнивают их величины, формируют окончательные выходные данные и передают их на средство визуального отображения информации водителя и на внешние блоки управления движением автопоезда для использования в качестве входных данных, обеспечивающих безопасное управление движением автопоезда.
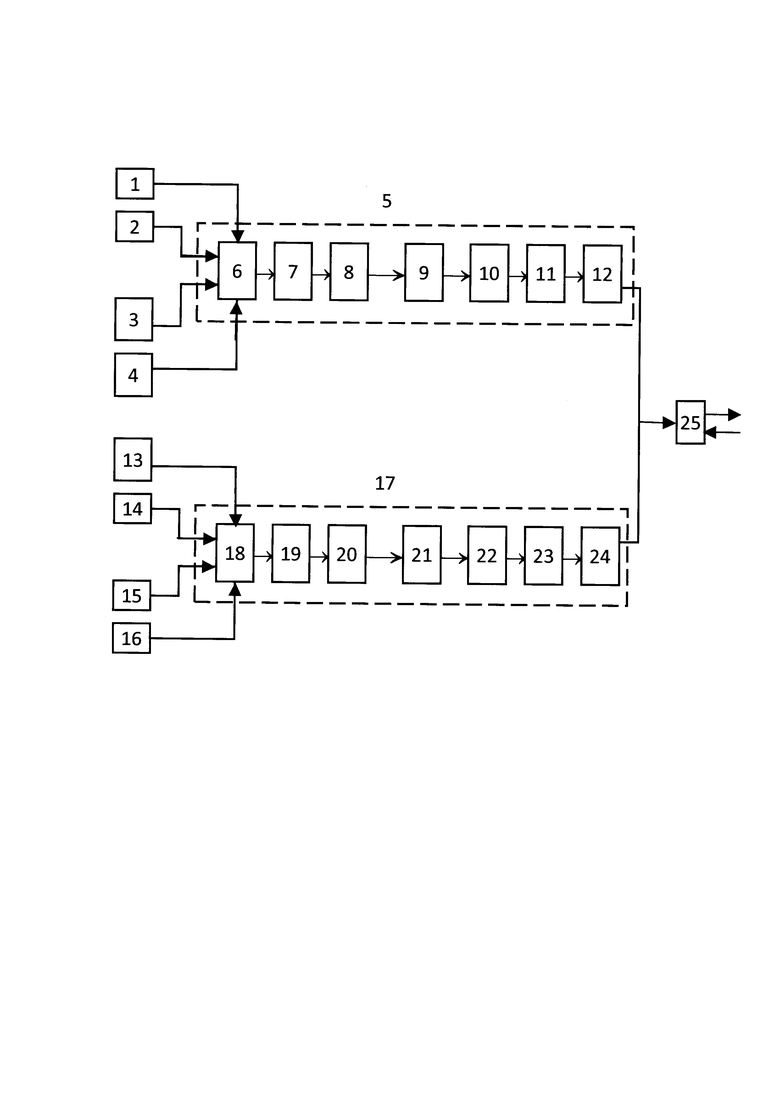
Поставленная техническая задача решается тем, что система идентификации максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа в составе системы управления движением автопоезда содержит датчики 1, 2, 3, 4 частот вращения колес автомобиля, электрически связанные с микроконтроллерным устройством 5 обработки информации автомобиля, посредством линий связи с устройством 6 сопряжения с микроконтроллерным устройством 5 обработки информации автомобиля, микроконтроллерное устройство 5 обработки информации автомобиля включает блок 7 анализа сигналов датчиков 1, 2, 3, 4 частот вращения колес автомобиля, блок 8 оценивания параметров движения автомобиля, блок 9 вычисления нормальных составляющих динамических нагрузок, действующих на каждое колесо автомобиля, блок 10 вычисления распределения тягово-тормозных сил, действующих на каждое колесо автомобиля, блок 11 решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения колес автомобиля, блок 12 фильтрации оценок максимальных значений коэффициентов трения скольжения колес автомобиля, причем в системе блок 9 вычисления нормальных составляющих динамических нагрузок, блок 10 вычисления распределения тягово-тормозных сил, блок 11 решения обратной задачи кусочно-линейной аппроксимации, блок 12 фильтрации оценок, выполнены на базе микроконтроллерного устройства 5 обработки информации автомобиля с возможностью программного исполнения функций блока 9 вычисления нормальных составляющих динамических нагрузок, блока 10 распределения тягово-тормозных сил, блока 11 решения обратной задачи кусочно-линейной аппроксимации, блока 12 фильтрации оценок, а функции блока 9 вычисления нормальных составляющих динамических нагрузок, действующих на каждое колесо, выполнены с возможностью учета влияния продольного и поперечного ускорений на распределение нормальных составляющих динамических нагрузок, блока 10 распределения тягово-тормозных сил выполнены с возможностью учета распределения тяговых сил от двигателя и трансмиссии и от тормозной системы по колесам, блока 11 решения обратной задачи кусочно-линейной аппроксимации выполнены с возможностью формирования оценок максимальных значений коэффициентов трения скольжения колес в диапазоне скольжений устойчивого участка типовой зависимости силы трения от скольжения, блока 12 фильтрации оценок выполнены с возможностью снижения влияния шумов измерений на результаты идентификации путем устранения выбросов значений данных в результате проверки по диапазонам и гладкости данных, удовлетворяющих условиям ограничений по первой и второй производным, при этом система идентификации максимальных значений коэффициентов трения скольжения колес автопоезда в составе автомобиля и прицепа, в которой подсистема управления движением прицепа автопоезда дополнительно содержит датчики 13, 14, 15, 16 частот вращения колес прицепа, электрически связанные с микроконтроллерным устройством 17 обработки информации прицепа, посредством линий связи с устройством 18 сопряжения с микроконтроллерным устройством 17 обработки информации прицепа, микроконтроллерное устройство 17 обработки информации прицепа включает блок 19 анализа сигналов датчиков 13, 14, 15, 16 частот вращения колес прицепа, блок 20 оценивания параметров движения прицепа, блок 21 вычисления нормальных составляющих динамических нагрузок, действующих на каждое колесо прицепа, блок 22 вычисления распределения тягово-тормозных сил, действующих на каждое колесо прицепа, блок 23 решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения колес прицепа, блок 24 фильтрации оценок максимальных значений коэффициентов трения скольжения колес прицепа, причем в системе блок 21 вычисления нормальных составляющих динамических нагрузок прицепа, блок 22 вычисления распределения тягово-тормозных сил прицепа, блок 23 решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения колес прицепа, блок 24 фильтрации оценок максимальных значений коэффициентов трения скольжения колес прицепа, выполнены на базе микроконтроллерного устройства 17 обработки информации прицепа с возможностью программного исполнения функций блока 21 вычисления нормальных составляющих динамических нагрузок прицепа, блока 22 вычисления распределения тягово-тормозных сил прицепа, блока 23 решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения колес прицепа, блока 24 фильтрации оценок максимальных значений коэффициентов трения скольжения колес прицепа, а функции блока 21 вычисления нормальных составляющих динамических нагрузок прицепа, действующих на каждое колесо прицепа, выполнены с возможностью учета влияния продольного и поперечного ускорений на распределение нормальных составляющих динамических нагрузок, блока 22 вычисления распределения тягово-тормозных сил прицепа выполнены с возможностью учета распределения тяговых сил трансмиссии и от тормозной системы по колесам прицепа, блока 23 решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения колес прицепа выполнены с возможностью формирования оценок максимальных значений коэффициентов трения скольжения колес прицепа в диапазоне скольжений устойчивого участка типовой зависимости силы трения от скольжения колес прицепа, блока 24 фильтрации оценок максимальных значений коэффициентов трения скольжения колес прицепа выполнены с возможностью снижения влияния шумов измерений на результаты идентификации путем устранения выбросов данных в результате проверки по диапазонам и гладкости данных, удовлетворяющих условиям ограничений по первой и второй производным, при этом дополнительный информационно-управляющий блок 25 автопоезда выполнен с возможностью оперативного ввода настроечных данных используемой математической модели для выбранного вида шин автомобиля и прицепа, выбранной из ряда разных моделей, а также с возможностью сравнения максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа и формирования окончательных выходных данных, и вывода выходных данных на средство визуального отображения информации водителя и на функциональные блоки системы активной безопасности для использования в качестве входных данных с возможностью обеспечения безопасного управления движением автопоезда.
При этом датчики 1, 2, 3, 4 частот вращения колес автомобиля и/или датчики 13, 14, 15, 16 частот вращения колес прицепа на колесах автомобиля и/или прицепа с двускатными колесами могут быть установлены как единое целое со стороны внешних либо внутренних скатов автомобиля и/или прицепа в зависимости от особенностей их конструкции и назначения, например, в автомобилях двойного назначения целесообразно устанавливать датчики с внутренней стороны, то есть на внутренних из сдвоенных скатов автомобиля и/или прицепа или на оси, контактирующей с дорогой постоянно при выполнении внешней оси автомобиля и/или прицепа с возможностью ее подъема при движении без нагрузки.
Кроме этого, датчики 1, 2, 3, 4 частот вращения колес автомобиля и/или датчики 13, 14, 15, 16 частот вращения колес прицепа с количеством более двух осей у автомобиля и/или прицепа могут быть установлены на колесах внешних передней и задней осей автомобиля и/или прицепа, но с учетом выше указанных особенностей их конструкции и назначения.
Краткое описание чертежей
На Фиг. 1 показана блок-схема системы идентификации максимальных значений коэффициентов трения скольжения колес автопоезда.
Осуществление изобретения
Технические результаты достигаются путем создания системы идентификации максимальных значений коэффициентов трения скольжения колес автопоезда в составе автомобиля и прицепа, в которой блоки связаны определенным, выше указанным образом.
Система идентификации максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа в составе системы управления движением автопоезда содержит датчики 1, 2, 3, 4 частот вращения колес автомобиля, электрически связанные с микроконтроллерным устройством 5 обработки информации автомобиля, посредством линий связи с устройством 6 сопряжения с микроконтроллерным устройством 5 обработки информации автомобиля, микроконтроллерное устройство 5 обработки информации автомобиля включает блок 7 анализа сигналов датчиков 1, 2, 3, 4 частот вращения колес автомобиля, блок 8 оценивания параметров движения автомобиля, блок 9 вычисления нормальных составляющих динамических нагрузок, действующих на каждое колесо автомобиля, блок 10 вычисления распределения тягово-тормозных сил, действующих на каждое колесо автомобиля, блок 11 решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения колес автомобиля, блок 12 фильтрации оценок максимальных значений коэффициентов трения скольжения колес автомобиля, причем в системе блок 9 вычисления нормальных составляющих динамических нагрузок, блок 10 вычисления распределения тягово-тормозных сил, блок 11 решения обратной задачи кусочно-линейной аппроксимации, блок 12 фильтрации оценок, выполнены на базе микроконтроллерного устройства 5 обработки информации автомобиля с возможностью программного исполнения функций блока 9 вычисления нормальных составляющих динамических нагрузок, блока 10 распределения тягово-тормозных сил, блока 11 решения обратной задачи кусочно-линейной аппроксимации, блока 12 фильтрации оценок, а функции блока 9 вычисления нормальных составляющих динамических нагрузок, действующих на каждое колесо, выполнены с возможностью учета влияния продольного и поперечного ускорений на распределение нормальных составляющих динамических нагрузок, блока 10 распределения тягово-тормозных сил выполнены с возможностью учета распределения тяговых сил от двигателя и трансмиссии и от тормозной системы по колесам, блока 11 решения обратной задачи кусочно-линейной аппроксимации выполнены с возможностью формирования оценок максимальных значений коэффициентов трения скольжения колес в диапазоне скольжений устойчивого участка типовой зависимости силы трения от скольжения, блока 12 фильтрации оценок выполнены с возможностью снижения влияния шумов измерений на результаты идентификации путем устранения выбросов данных в результате проверки по диапазонам и гладкости данных, удовлетворяющих условиям ограничений по первой и второй производным, отличающаяся тем, что система дополнительно содержит датчики 13, 14, 15, 16 частот вращения колес прицепа, электрически связанные с микроконтроллерным устройством 17 обработки информации прицепа, посредством линий связи с устройством 18 сопряжения с микроконтроллерным устройством 17 обработки информации прицепа, микроконтроллерное устройство 17 обработки информации прицепа включает блок 19 анализа сигналов датчиков 13, 14, 15, 16 частот вращения колес прицепа, блок 20 оценивания параметров движения прицепа, блок 21 вычисления нормальных составляющих динамических нагрузок, действующих на каждое колесо прицепа, блок 22 вычисления распределения тягово-тормозных сил, действующих на каждое колесо прицепа, блок 23 решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения колес прицепа, блок 24 фильтрации оценок максимальных значений коэффициентов трения скольжения колес прицепа, причем в системе блок 21 вычисления нормальных составляющих динамических нагрузок прицепа, блок 22 вычисления распределения тягово-тормозных сил прицепа, блок 23 решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения колес прицепа, блок 24 фильтрации оценок максимальных значений коэффициентов трения скольжения колес прицепа, выполнены на базе микроконтроллерного устройства 17 обработки информации прицепа с возможностью программного исполнения функций блока 21 вычисления нормальных составляющих динамических нагрузок прицепа, блока 22 вычисления распределения тягово-тормозных сил прицепа, блока 23 решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения колес прицепа, блока 24 фильтрации оценок максимальных значений коэффициентов трения скольжения колес прицепа, а функции блока 21 вычисления нормальных составляющих динамических нагрузок прицепа, действующих на каждое колесо прицепа, выполнены с возможностью учета влияния продольного и поперечного ускорений на распределение нормальных составляющих динамических нагрузок, блока 22 вычисления распределения тягово-тормозных сил прицепа выполнены с возможностью учета распределения тяговых сил трансмиссии и от тормозной системы по колесам прицепа, блока 23 решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения колес прицепа выполнены с возможностью формирования оценок максимальных значений коэффициентов трения скольжения колес прицепа в диапазоне скольжений устойчивого участка типовой зависимости силы трения от скольжения колес прицепа, блока 24 фильтрации оценок максимальных значений коэффициентов трения скольжения колес прицепа выполнена с возможностью снижения влияния шумов измерений на результаты идентификации путем устранения выбросов данных в результате проверки по диапазонам и гладкости данных, удовлетворяющих условиям ограничений по первой и второй производным, при этом дополнительный информационно-управляющий блок 25 автопоезда выполнен с возможностью оперативного ввода настроечных данных используемой математической модели для шин, реально установленных на автомобиле и прицепе для конкретного автопоезда, выбранной из разных существующих моделей, а также с возможностью сравнения максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа, формирования окончательных выходных данных, и вывода выходных данных на средство визуального отображения информации водителя и на функциональные блоки системы активной безопасности для использования в качестве входных данных с возможностью обеспечения безопасного управления движением автопоезда.
При этом датчики 1, 2, 3, 4 частот вращения колес автомобиля и/или датчики 13, 14, 15, 16 частот вращения колес прицепа на колесах автомобиля и/или прицепа с двускатными колесами могут быть установлены как единое целое со стороны внешних либо внутренних скатов автомобиля и/или прицепа в зависимости от вышеуказанных особенностей их конструкции и назначения. Преимущественно датчики частот вращения колес устанавливают со стороны внешних скатов.
Но в зависимости от большей конструктивной простоты установки датчиков и меньших затрат на их установку, от удобства эксплуатации и обслуживания, а также от варианта применения автопоезда, например, двойного назначения, требующего дополнительной защиты от внешних воздействий, датчики частот вращения колес могут устанавливаться со стороны внутренних скатов автомобиля и/или прицепа.
Кроме этого датчики 1, 2, 3, 4 частот вращения колес автомобиля и/или датчики 13, 14, 15, 16 частот вращения колес прицепа с количеством осей более двух у автомобиля и/или прицепа целесообразно устанавливать на колесах передней и последней задней осях автомобиля и/или прицепа, но с учетом особенностей вышеуказанных особенностей их конструкции и назначения. Исключением из этого правила могут быть, например, варианты конструкции автомобилей и прицепов автопоездов с поднимаемой одной из внешних осей при их движении без груза.
Предложенная система работает следующим образом.
При движении автопоезда у автомобиля датчики 1, 2, 3, 4 вырабатывают импульсные сигналы, соответствующие частотам вращения колес автомобиля, а так как они электрически связаны линиями связи через устройство сопряжения 6 с микроконтроллерным устройством 5 обработки информации автомобиля, то эти сигналы посредством линий связи с устройством сопряжения 6 поступают в микроконтроллерное устройство 5 обработки информации автомобиля, которое включает программный блок 7 анализа сигналов датчиков 1, 2, 3, 4 частот вращения колес автомобиля, который сравнивает их значения с рабочим диапазоном сигналов датчиков и выявляет датчики у которых возникли неисправности в виде пропадания сигнала на ограниченном временном интервале, при этом показания вышедшего из строя датчика автоматически исключаются из дальнейшего анализа.
Далее, в микропроцессорном устройстве 5 обработки информации автомобиля программный блок 8 оценивания параметров движения автомобиля сравнивает сигналы от датчиков 1, 2, 3, 4 частот вращения колес и получает данные, характеризующие параметры движения автомобиля, в частности, продольную скорость центра масс, продольное и поперечное ускорения автомобиля, угол поворота управляемых колес, скорости продольных скольжений колес автомобиля, давления воздуха в шинах и др.
В программном блоке 9 вычисления нормальных составляющих динамических нагрузок автомобиля выполняется расчет распределения нормальных составляющих сил, действующих на каждое колесо, с учетом полной массы и развесовки по осям автомобиля, радиусов колес, ширины колеи, колесной базы и высоты центра масс, а также продольных и поперечных ускорений, определяемых в блоке 8.
В программном блоке 10 вычисления распределения тягово-тормозных сил по колесам автомобиля выполняется расчет тяговых и тормозных сил, действующих на колеса с учетом типа привода (передний, задний, полный) и параметров тормозной системы.
В программном блоке 11 решения обратной задачи кусочно-линейной аппроксимации зависимости коэффициента трения скольжения от величины скольжения колеса автомобиля выполняется расчет максимального значения коэффициента трения скольжения для одного из трех участков аппроксимации исходной кривой в зависимости от измеренного скольжения колеса автомобиля.
В программном блоке 12 фильтрации оценок максимальных значений коэффициентов трения скольжения колес автомобиля выполняется проверка условий достоверности полученных оценок путем их сравнения с допустимым диапазоном изменений, допустимыми величинами первой и второй производных.
В свою очередь при движении прицепа датчики 13, 14, 15, 16 частот вращения колес прицепа вырабатывают импульсные сигналы, соответствующие частотам вращения соответствующих колес прицепа, а так как они электрически связаны линиями связи через устройство 18 сопряжения с микроконтроллерным устройством 17 обработки информации прицепа, то эти сигналы посредством линий связи с устройством 18 сопряжения поступают в микроконтроллерное устройство 17 обработки информации прицепа, которое включает программный блок 19 анализа сигналов датчиков 13, 14, 15, 16 частот вращения колес прицепа, который сравнивает их значения с рабочим диапазоном сигналов датчиков и выявляет датчики у которых возникли неисправности в виде пропадания сигнала на ограниченном временном интервале, при этом показания вышедшего из строя датчика автоматически исключаются из дальнейшего анализа.
Далее, в микропроцессорном устройстве 17 обработки информации прицепа программный блок оценивания 20 параметров движения прицепа сравнивает сигналы от датчиков 13, 14, 15, 16 частот вращения колес прицепа и получает данные, характеризующие параметры движения прицепа, в частности, продольную скорость центра масс, продольное и поперечное ускорения прицепа, угол поворота управляемых колес, скорости продольных скольжений колес прицепа, давления воздуха в шинах.
В программном блоке 21 вычисления нормальных составляющих динамических нагрузок прицепа выполняется расчет распределения нормальных составляющих сил, действующих на каждое колесо прицепа, с учетом полной массы и развесовки по осям прицепа, радиусов колес, ширины колеи, колесной базы и высоты центра масс, а также продольных и поперечных ускорений, определяемых в блоке 20.
В программном блоке 22 вычисления распределения тягово-тормозных сил по колесам прицепа выполняется расчет тяговых и тормозных сил, действующих на колеса с учетом типа привода (передний, задний, полный) и параметров тормозной системы.
В программном блоке 23 решения обратной задачи кусочно-линейной аппроксимации зависимости коэффициента трения скольжения от величины скольжения колеса прицепа выполняется расчет максимального значения коэффициента трения скольжения для одного из трех участков аппроксимации исходной кривой в зависимости от измеренного скольжения колеса прицепа.
В программном блоке 24 фильтрации оценок максимальных значений коэффициентов трения скольжения колес прицепа выполняется проверка условий достоверности полученных оценок путем их сравнения с допустимым диапазоном изменений, допустимыми величинами первой и второй производных.
Информационно-управляющий блок 25 автопоезда выполняет функции ввода и хранения настроечных данных используемой математической модели для шин, выбранных для автомобиля и прицепа, используемых в конкретном автопоезде, сравнения максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа, формирования окончательных выходных данных, и передачи выходных данных на средство визуального отображения информации водителю и передачи их на функциональные блоки системы активной безопасности для использования в качестве входных данных с возможностью обеспечения безопасного управления движением автопоезда.
К числу преимуществ, то есть технических результатов, достигаемых предлагаемой системой можно отнести, в том числе, следующие:
- идентификация максимальных значений коэффициентов трения скольжения колес производится в автопоезде как на автомобиле, так и на прицепе, что позволяет существенно увеличить эффективность работы системы активной безопасности автопоезда в целом;
- идентификация максимальных значений коэффициентов трения скольжения всех колес выполняется при разгонах, движении с постоянной скоростью и торможениях автопоезда;
- низкая стоимость технических средств, обусловленная отсутствием необходимости введения дополнительных энергопотребляющих физических датчиков первичной информации, установленных на прицепе и необходимых для решения поставленной технической задачи;
- возможность функционирования в неполной конфигурации датчиков частот вращения колес, включая отказы одного или двух датчиков с разных бортов автомобиля и/или прицепа и системы активной безопасности автопоезда в целом;
- пониженное энергопотребление системы, обусловленное отсутствием дополнительных энергопотребляющих датчиков информации;
- более высокая эксплуатационная надежность, обусловленная минимальной конфигурацией используемых технических средств в системе, включая датчики первичной информации;
- достижение новых, ранее неизвестных технических результатов по обеспечению безопасного управления движением всего автопоезда в целом путем идентификации и учета в работе системы его управления движением максимальных значений коэффициентов трения скольжения колес не только автомобиля, но и прицепа, а также по обеспечению синхронизированной работы указанных частей и всего автопоезда в целом;
- отсутствие влияния состояния внешней среды, включая освещенность, осадки, туман, состояние дорожного покрытия и других погодных и дорожных факторов на эффективность функционирования системы обеспечения безопасного управления движением автопоезда.
На основании изложенного можно утверждать следующее.
Поставленная техническая задача решается техническими средствами и может быть использована в предложенном виде для оснащения как новых, так и находящихся в эксплуатации автопоездов, следовательно, предложение соответствует критерию изобретения «промышленная применимость».
Предложение имеет отличия от известного способа работы, следовательно, соответствует критерию изобретения «новизна».
Предложение при выполнении всех известных и новых действий способа позволяет достичь новых, ранее неизвестных технических результатов, следовательно, соответствует критерию изобретения «изобретательский уровень».
Система идентификации максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа в составе системы управления движением автопоезда
Система идентификации максимальных значений коэффициентов трения скольжения колес ТС.
1, 2, 3, 4 - датчики частот вращения колес автомобиля;
5 - микроконтроллерное устройство обработки информации автомобиля;
6 - устройство сопряжения с микроконтроллерным устройством 5 автомобиля;
7 - блок анализа сигналов датчиков 1, 2, 3, 4 автомобиля;
8 - блок оценивания параметров движения автомобиля;
9 - блок вычисления нормальных составляющих динамических нагрузок, действующих на каждое колесо автомобиля;
10 - блок вычисления распределения тягово-тормозных сил, действующих на каждое колесо автомобиля;
11 - блок решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения колес автомобиля;
12 - блок фильтрации оценок максимальных значений коэффициентов трения скольжения колес автомобиля;
13, 14, 15, 16 - датчики частот вращения колес прицепа;
17 - микроконтроллерное устройство обработки информации прицепа;
18 - устройство сопряжения с микроконтроллерным устройством 17 прицепа;
19 - блок анализа сигналов датчиков 13, 14, 15, 16 прицепа;
20 - блок оценивания параметров движения прицепа;
21 - блок вычисления нормальных составляющих динамических нагрузок, действующих на каждое колесо прицепа;
22 - блок вычисления распределения тягово-тормозных сил, действующих на каждое колесо прицепа;
23 - блок решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения колес прицепа;
24 - блок фильтрации оценок максимальных значений коэффициентов трения скольжения колес прицепа;
25 - информационно-управляющий блок автопоезда.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ идентификации максимальных значений коэффициентов трения скольжения колёс автомобиля и прицепа в составе системы управления движением автопоезда | 2023 |
|
RU2811997C1 |
| Система идентификации максимальных значений коэффициентов трения скольжения колёс транспортного средства | 2022 |
|
RU2779538C1 |
| Способ идентификации максимальных значений коэффициентов трения скольжения колёс транспортного средства | 2022 |
|
RU2779539C1 |
| Способ предотвращения сноса и заноса колёс системой помощи водителю автопоезда | 2023 |
|
RU2812000C1 |
| Способ определения угловой скорости дополнительного рыскания колёс автопоезда | 2023 |
|
RU2812026C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ АВАРИЙНОГО ПЕРЕГРЕВА ШИН И ТОРМОЗОВ АВТОМОБИЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2513439C1 |
| Система контроля и предотвращения дополнительного рыскания колёс автомобиля | 2023 |
|
RU2812030C1 |
| Способ предотвращения опрокидывания автопоезда | 2023 |
|
RU2811998C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2737069C1 |
| Система предотвращения опрокидывания автопоезда | 2023 |
|
RU2811999C1 |
Изобретение относится к автомобилестроению. Система идентификации максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа в составе системы управления движением автопоезда измеряет максимальные значения коэффициентов трения скольжения колес автопоезда и содержит два микроконтроллерных устройства отдельно для автомобиля и прицепа. В каждом из них имеется по четыре датчика частот вращения колес, электрически связанных с соответствующим микроконтроллерным устройством обработки информации. Повышается эффективность работы. 2 з.п. ф-лы, 1 ил.
1. Система идентификации максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа в составе системы управления движением автопоезда содержит датчики 1, 2, 3, 4 частот вращения колес автомобиля, электрически связанные с микроконтроллерным устройством 5 обработки информации автомобиля, посредством линий связи с устройством 6 сопряжения с микроконтроллерным устройством 5 обработки информации автомобиля, микроконтроллерное устройство 5 обработки информации автомобиля включает блок 7 анализа сигналов датчиков 1, 2, 3, 4 частот вращения колес автомобиля, блок 8 оценивания параметров движения автомобиля, блок 9 вычисления нормальных составляющих динамических нагрузок, действующих на каждое колесо автомобиля, блок 10 вычисления распределения тягово-тормозных сил, действующих на каждое колесо автомобиля, блок 11 решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения колес автомобиля, блок 12 фильтрации оценок максимальных значений коэффициентов трения скольжения колес автомобиля,
причем в системе блок 9 вычисления нормальных составляющих динамических нагрузок, блок 10 вычисления распределения тягово-тормозных сил, блок 11 решения обратной задачи кусочно-линейной аппроксимации, блок 12 фильтрации оценок, выполнены на базе микроконтроллерного устройства 5 обработки информации автомобиля с возможностью программного исполнения функций блока 9 вычисления нормальных составляющих динамических нагрузок, блока 10 распределения тягово-тормозных сил, блока 11 решения обратной задачи кусочно-линейной аппроксимации, блока 12 фильтрации оценок, а функции блока 9 вычисления нормальных составляющих динамических нагрузок, действующих на каждое колесо, выполнены с возможностью учета влияния продольного и поперечного ускорений на распределение нормальных составляющих динамических нагрузок, блока 10 распределения тягово-тормозных сил выполнены с возможностью учета распределения тяговых сил от двигателя и трансмиссии и от тормозной системы по колесам, блока 11 решения обратной задачи кусочно-линейной аппроксимации выполнены с возможностью формирования оценок максимальных значений коэффициентов трения скольжения колес в диапазоне скольжений устойчивого участка типовой зависимости силы трения от скольжения, блока 12 фильтрации оценок выполнены с возможностью снижения влияния шумов измерений на результаты идентификации путем устранения выбросов значений данных в результате проверки по диапазонам и гладкости данных, удовлетворяющих условиям ограничений по первой и второй производным,
отличающаяся тем, что
система идентификации максимальных значений коэффициентов трения скольжения колес автопоезда в составе автомобиля и прицепа, в которой подсистема управления движением прицепа автопоезда дополнительно содержит датчики 13, 14, 15, 16 частот вращения колес прицепа, электрически связанные с микроконтроллерным устройством 17 обработки информации прицепа, посредством линий связи с устройством 18 сопряжения с микроконтроллерным устройством 17 обработки информации прицепа, микроконтроллерное устройство 17 обработки информации прицепа включает блок 19 анализа сигналов датчиков 13, 14, 15, 16 частот вращения колес прицепа, блок 20 оценивания параметров движения прицепа, блок 21 вычисления нормальных составляющих динамических нагрузок, действующих на каждое колесо прицепа, блок 22 вычисления распределения тягово-тормозных сил, действующих на каждое колесо прицепа, блок 23 решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения колес прицепа, блок 24 фильтрации оценок максимальных значений коэффициентов трения скольжения колес прицепа, причем в системе блок 21 вычисления нормальных составляющих динамических нагрузок прицепа, блок 22 вычисления распределения тягово-тормозных сил прицепа, блок 23 решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения колес прицепа, блок 24 фильтрации оценок максимальных значений коэффициентов трения скольжения колес прицепа, выполнены на базе микроконтроллерного устройства 17 обработки информации прицепа с возможностью программного исполнения функций блока 21 вычисления нормальных составляющих динамических нагрузок прицепа, блока 22 вычисления распределения тягово-тормозных сил прицепа, блока 23 решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения колес прицепа, блока 24 фильтрации оценок максимальных значений коэффициентов трения скольжения колес прицепа, а функции блока 21 вычисления нормальных составляющих динамических нагрузок прицепа, действующих на каждое колесо прицепа, выполнены с возможностью учета влияния продольного и поперечного ускорений на распределение нормальных составляющих динамических нагрузок, блока 22 вычисления распределения тягово-тормозных сил прицепа выполнены с возможностью учета распределения тяговых сил трансмиссии и от тормозной системы по колесам прицепа, блока 23 решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения колес прицепа выполнены с возможностью формирования оценок максимальных значений коэффициентов трения скольжения колес прицепа в диапазоне скольжений устойчивого участка типовой зависимости силы трения от скольжения колес прицепа, блока 24 фильтрации оценок максимальных значений коэффициентов трения скольжения колес прицепа выполнены с возможностью снижения влияния шумов измерений на результаты идентификации путем устранения выбросов данных в результате проверки по диапазонам и гладкости данных, удовлетворяющих условиям ограничений по первой и второй производным,
при этом дополнительный информационно-управляющий блок 25 автопоезда выполнен с возможностью оперативного ввода настроечных данных используемой математической модели для выбранного вида шин автомобиля и прицепа, выбранной из ряда разных моделей, а также с возможностью сравнения максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа, формирования окончательных выходных данных, и вывода выходных данных на средство визуального отображения информации водителя и на функциональные блоки системы активной безопасности для использования в качестве входных данных с возможностью обеспечения безопасного управления движением автопоезда.
2. Система идентификации максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа в системе управления движением автопоезда по п. 1, отличающаяся тем, что датчики 1, 2, 3, 4 частот вращения колес автомобиля и/или датчики 13, 14, 15, 16 частот вращения колес прицепа на колесах автомобиля и/или прицепа с двускатными колесами установлены как единое целое со стороны внешних либо внутренних скатов автомобиля и/или прицепа.
3. Система идентификации максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа в системе управления движением автопоезда по пп. 1, 2, отличающаяся тем, что датчики 1, 2, 3, 4 частот вращения колес автомобиля и/или датчики 13, 14, 15, 16 частот вращения колес прицепа с количеством осей более двух у автомобиля и/или прицепа установлены на колесах внешних передней и задней осей автомобиля и/или прицепа.
| Система идентификации максимальных значений коэффициентов трения скольжения колёс транспортного средства | 2022 |
|
RU2779538C1 |
| Способ идентификации максимальных значений коэффициентов трения скольжения колёс транспортного средства | 2022 |
|
RU2779539C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ ИСПЫТАНИЯ ТОРМОЖЕНИЯ НА АВТОМОБИЛЯХ С ПРИЦЕПОМ И/ИЛИ ПОЛУПРИЦЕПОМ | 2011 |
|
RU2487807C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2737069C1 |
| US 20020072842 A1, 13.06.2002 | |||
| US 20020087251 A1, 04.07.2002. | |||

