Изобретение относится к вездеходным транспортным средствам, предназначенным для перемещения по поверхностям с различным рельефом, имеющим универсальное назначение в использовании с возможностью оптической локации для предупреждения столкновений с препятствиями.
Известен многофункциональный мобильный модуль для автоматического управления транспортным средством, содержащий раму, выполненную из металлического профиля, камеры, лидар (Патент № RU 2794386. Опубл. 17.04.2023).
Однако известный модуль, не смотря на наличие отдельных эквивалентных элементов и узлов, заявленному техническому решению, имеет сложную конструкцию и не предназначен для перемещения различных грузов по рельефной местности.
Известна мотовездеходная транспортная платформа, имеющая колесную формулу 6×6 и содержащая двигатель, автоматическую коробку передач, подвеску, поворотный механизм, приводную передачу, герметичный кузов с отсеками, по обеим сторонам которого расположены колеса, при этом мотовездеходная транспортная платформа дополнительно имеет отключаемый передний привод и принудительную блокировку дифференциалов переднего, среднего и заднего мостов, а применяемые узлы и агрегаты используются от мотовездеходной и снегоходной техники (Патент № RU211430. Опубл. 06.06.2022).
Однако известная мотовездеходная транспортная платформа, для обеспечения высоких показателей проходимости требует дополнительной подготовки движителей. Причём, для определенных условий движения, необходима своя особенная подготовка, такая как установка гусениц, лыж, перевод трансмиссии в соответствующий режим и т.д. Известное техническое решение имеет малую грузоподъемность, не предназначается для транспортировки грузов, т.к. отсутствует достаточное пространство для размещения груза. Платформа имеет сложную трансмиссию, а также низкую, в сравнении с предлагаемой конструкцией, геометрическую проходимость. Ввиду использования силовой установки с ДВС, в известной конструкции, сложно обеспечить дистанционное или автоматическое управление платформой.
Известен многофункциональный всесезонный вездеход с колесной формулой 6×6, состоящий из герметичного кузова с пассажирским и грузовым отсеками, подвески, колес, двигателя, автоматической коробки передач, поворотного механизма, приводной передачи, движителей: - гусеничного, - лыжно-гусеничного, - полугусеничного и водометного (Патент № RU 2574043 С2. Опубл. 27.01.2016г.).
К недостаткам известной конструкции многофункционального вездехода следует отнести сложность трансмиссии, большой вес, необходимость специальной подготовки движителя для движения по соответствующему типу покрытия, нерациональная компоновка с единственным входом, являющимся одновременно и дверью для загрузки перевозимого груза. При этом размещать груз в салоне необходимо таким образом, чтобы оставался проход в переднюю часть салона. Ввиду использования силовой установки с ДВС, в известной конструкции, сложно обеспечить дистанционное или автоматическое управление вездеходом.
При исследовании и анализе уровня техники не выявлено наиболее близких конструктивных решений заявленному техническому решению.
Таким образом, описанные выше изобретения имеют недостатки в виде: сложной трансмиссии с различными режимами её работы; отсутствия достаточного места для размещения габаритных грузов; отсутствия системы регулировки давления в шинах, а также - сложностей с организацией дистанционного или автоматизированного управления.
Задачей настоящего изобретения, является расширение арсенала технических средств, предназначенных для перемещения грузов по поверхности различного рельефа.
Технический результат проявляется в возможности многоразового использования платформы в труднопроходимых рельефах местности, для доставки габаритных грузов или людей в условиях полного бездорожья с возможностью форсирования водных преград, с возможностью автоматического управления, в качестве транспортного челнока, с формированием картины окружающего пространства, удобной погрузки и разгрузки груза.
Поставленный технический результат, согласно первому варианту, достигается тем, что электрическая транспортная платформа челнок выполнена симметричной относительно, вертикальной продольной плоскости, конструктивно выполнена на двухосным шасси, состоящим из корпуса, пары осей, каждая из которых оснащена парой колес, при этом в конструкции колес использованы шины низкого давления, корпус, выполнен в форме пространственной рамы, со смонтированными на её противоположных бортах двумя независимыми трансмиссиями, крыльями, боковыми отсеками, в которых, размещены, соответственно, теплообменники, электроприводы, контроллеры, компрессоры системы регулировки давления в шинах колес, в центральной части корпуса установлен источник питания, над которым в направляющих установлен основной контейнер, в виде прямоугольного параллелепипеда, длинная сторона которого выполнена не более габаритов платформы, оснащенный верхней крышкой или верхней и переднее/задней крышками, платформа оснащена, передним и задним узлами фиксации основного контейнера, кроме того, на каждом крыле установлены приборы автономной навигации, задние крылья оснащены гидродинамическими решетками, платформа оборудована электронной системой управления взаимосвязанной с пультом.
Целесообразно, для удобства загрузки и выгрузки основного контейнера платформы, выполнять его в виде прямоугольного параллелепипеда, оборудованного открывающимися или съемными крышками.
Целесообразно для повышения компактности конструктива платформы, электроприводы и независимые трансмиссии монтировать на противоположных бортах платформы, оставляя центральную часть свободной для размещения основного контейнера.
Целесообразно, для увеличения срока службы источника питания, выполнять его в виде блока съемных/заменяемых батарей, а для улучшения развесовки платформы располагать блок батарей снизу по центру платформы.
Целесообразно, для повышения скорости передвижения на воде, оборудовать платформу гидродинамическими решетками для использования энергии «паразитных» потоков воды, образующихся при вращении колес платформы.
Целесообразно для удобства использования платформы, оборудовать её средствами связи и устройствами автономной навигации.
Поставленный технический результат, согласно второму варианту, достигается тем, что электрическая транспортная платформа челнок (вариант 2), выполнена симметричной относительно вертикальной продольной плоскости, конструктивно выполнена на двухосном шасси, состоящим из корпуса, пары осей, каждая из которых оснащена парой колес, при этом в конструкции колес использованы шины низкого давления, корпус выполнен в форме пространственной рамы, со смонтированными на её противоположных бортах двумя независимыми трансмиссиями, крыльями, боковыми отсеками, в которых, размещены, соответственно, теплообменники, электроприводы, контроллеры, компрессоры системы регулировки давления в шинах колес, в центральной части корпуса установлен источник питания.
Целесообразно, как и по первому варианту, электроприводы и независимые трансмиссии монтировать на противоположных бортах платформы; источник питания выполнять в виде блока батарей, и располагать снизу по центру платформы, оборудовать платформу, гидродинамическими решеткам для использования энергии «паразитных» потоков воды на плаву, средствами связи и устройствами автономной навигации.
Целесообразно, для обеспечения максимальной универсальности платформы, оставлять центральную часть максимально свободной от элементов конструкции, для размещения специализированного оборудования, грузов или людей.
Настоящее изобретение поясняют подробным описанием, схемами, на которых:
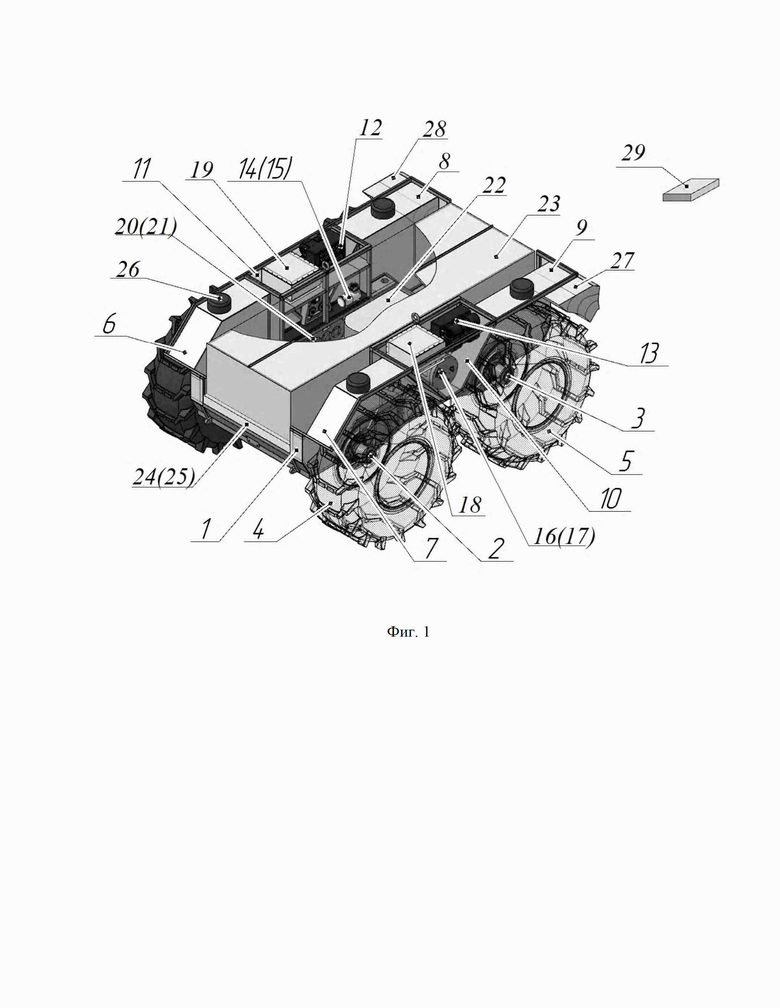
Фиг.1 - изображает изометрию электрической транспортной платформы челнока с разрезом центрального контейнера, в соответствии с первым вариантом;
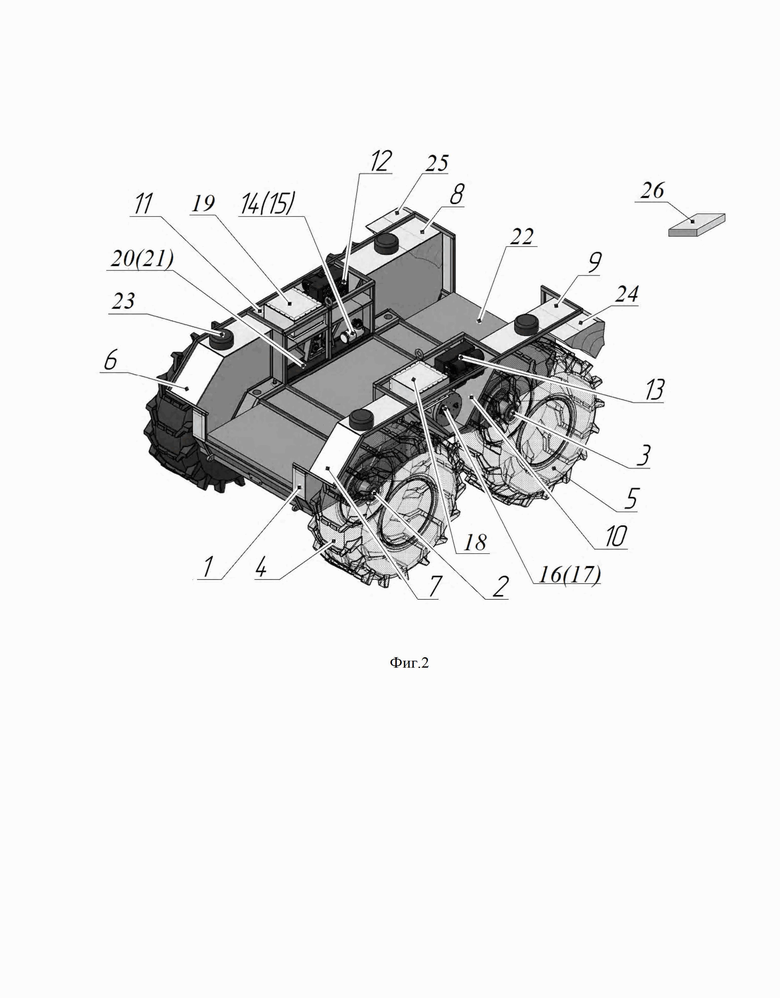
Фиг. 2 - изображает изометрию электрической транспортной платформы челнока, в соответствии со вторым вариантом.
Электрическая транспортная платформа челнок (далее платформа), согласно первому варианту, выполнена симметричной относительно, вертикальной продольной плоскости (Фиг. 1). Платформа конструктивно выполнена на двухосным шасси, состоящим из корпуса 1, пары осей 2, 3. Каждая из осей 2, 3 оснащена парой колес 4, 5. При этом в конструкции колес использованы шины низкого давления. Корпус 1, выполнен в форме пространственной рамы. На противоположных бортах корпуса 1 смонтированы крылья 6, 7, 8, 9 и боковые отсеки 10 и 11. В боковых отсеках 10, 11, размещены , соответственно, теплообменники 12 и 13, компрессоры 14 и 15 системы регулирования давления в шинах пар колес 4 и 5. В упомянутых отсеках 10 и 11 установлены электроприводы 16 и 17, контроллеры 18 и 19. Корпус 1, выполнен в форме пространственной рамы со смонтированными на её противоположных бортах двумя независимыми трансмиссиями 20 и 21. В центральной части корпуса 1 установлен источник питания 22, который может быть выполнен в виде блока батарей. Над источником питания 22 в направляющих (не показаны) установлен основной контейнер 23. Основной контейнер 23 выполнен в виде прямоугольного параллелепипеда, длинная сторона которого выполнена не более габаритов платформы. Основной контейнер 23 оснащен верхней крышкой или верхней и передней/задней крышками (далее крышки). Крышки могут быть выполнены открывающимися или съемными. Платформа оснащена, передним и задним узлами фиксации, соответственно, 24 и 25 основного контейнера 23.
Кроме того, на каждом крыле 6-9 установлены приборы автономной навигации 26 в виде лидаров, или радаров, или иных устройств. Задние крылья 8 и 9 оснащены гидродинамическими решетками 27 и 28. Оборудование задних крыльев 8 и 9 платформы гидродинамическими решетками 27 и 28 повышает скорости её передвижения на воде за счет использования энергии «паразитных» потоков воды, образующихся при вращении колес 4 и 5 платформы.
Платформа оборудована электронной системой управления взаимосвязанной с пультом 29. Оборудование платформы средствами связи и устройствами автономной навигации удобно для её использования в процессе эксплуатации.
Электрическая транспортная платформа челнок (далее платформа), согласно второму варианту, выполнена симметричной относительно, вертикальной продольной плоскости (Фиг. 2). Платформа конструктивно выполнена на двухосным шасси, состоящим из корпуса 1, пары осей 2, 3. Каждая из осей 2, 3 оснащена парой колес 4, 5. При этом в конструкции колес использованы шины низкого давления. Корпус 1, выполнен в форме пространственной рамы. На противоположных бортах корпуса 1 смонтированы крылья 6, 7, 8, 9 и боковые отсеки 10 и 11. В боковых отсеках 10, 11, размещены , соответственно, теплообменники 12 и 13, компрессоры 14 и 15 системы регулирования давления в шинах колес 4 и 5. В упомянутых отсеках 10 и 11 установлены электроприводы 16 и 17, контроллеры 18 и 19. Корпус 1, выполнен в форме пространственной рамы со смонтированными на её противоположных бортах двумя независимыми трансмиссиями 20 и 21. В центральной части корпуса 1 установлен источник питания 22. Последний может быть выполнен в виде блока батарей.
Кроме того, на каждом крыле 6-9 установлены приборы автономной навигации 23 в виде лидаров, или радаров, или иных устройств. Задние крылья 8 и 9 оснащены гидродинамическими решетками 24 и 25. Оборудование задних крыльев 8 и 9 платформы гидродинамическими решетками 24 и 25 повышает скорости её передвижения на воде за счет использования энергии «паразитных» потоков воды, образующихся при вращении колес 4 и 5 платформы.
Платформа оборудована электронной системой управления взаимосвязанной с пультом 26. Оборудование платформы средствами связи и устройствами автономной навигации удобно для её использования в процессе эксплуатации.
Максимальную универсальность платформы во втором варианте, обеспечивает максимально свободная её центральная часть от элементов конструкции, в частности от основного контейнера 23 в соответствии с первым вариантом. Свободная центральная часть платформы служит для размещения специализированного оборудования, грузов или людей.
Электрическую транспортную платформу челнок собирают и используют следующим образом.
Вариант 1.
В боковых контейнерах 10 и 11 корпуса 1 платформы располагают теплообменники, соответственно 12 и 13, электроприводы 16, 17, контроллеры 18 и 19, компрессоры 14 и 15 системы регулировки давления в шинах пар колес 4, 5. Под каждым боковым контейнером 10, 11 располагают, соответственно, бортовые трансмиссии 20, 21 и источник питания 22. Источник питания 22 выполняют из блоков батарей.
Затем на каждом из передних и задних крыльев 6-9 устанавливают лидары 26 или иные устройства автономной навигации. На задних крыльях 8, 9 закрепляют гидродинамические решетки 27, 28.
Далее, по центру платформы, между боковых контейнеров 10, 11 закрепляют центральный (основной) контейнер 23, который выполняют в виде пустотелого прямоугольного параллелепипеда. При этом его верхнюю грань выполняют в виде цельной крышки, установленной на шарнирах. Крышка может быть съёмной. Передний и задний боковые торцы основного контейнера 23, также могут быть оборудованы крышками, которые имеют возможность открытия и закрытия. Платформу оснащают узлами фиксации 24, 25, которые удерживают основной контейнер 23 на платформе в процессе её движения.
Платформу обеспечивают электронной системой управления, которую взаимосвязывают с пультом 29 по протоколу беспроводной связи, (радиосвязи, лазерной связи или иной, с возможностью использования ретранслятора сигнала (дрона-посредника) для увеличения рабочего плеча платформы.
После сборки платформы батареи заряжают. Платформу настраиваю и тестируют, после чего она готова к эксплуатации в рабочем режиме.
Активируют электронный блок управления с помощью беспроводного пульта 29 управления. При необходимости платформой может управлять рядом идущий оператор, используя беспроводной пульт 29 управления. Платформа может управляться, при необходимости, и с помощью специализированного сервера локальной сети. В программном обеспечении заложены такие основные команды как: «начало движения», «движение вперед», «движение назад», «стоп», «повороты направо, налево», «понизить давление в колесах передней оси, задней оси» и др.
Основной контейнер 23 можно сгружать с платформы целиком с помощью управления компрессорами 14, 15. Если необходимо сгрузить основной контейнер 23 на переднюю сторону платформы, снижают давление в паре передних колесах 4. Передняя часть платформы перемещается вниз и устанавливается под углом к горизонтальной плоскости. Основной контейнер 23 освобождают от узлов крепления 24, 25 и под своим весом он перемещается вперед. Аналогичные действия производят при сгрузке центрального контейнера 23 на заднюю сторону платформы. Если для разгрузки содержимого основного контейнера 23 нет необходимости сгружать его с платформы, то узлы фиксации 24, 25 не задействуют. Основной контейнер 23 можно загружать или разгружать, не сгружая его с платформы. Для более удобного использования платформы, можно наклонить платформу в нужную сторону, или опустить её полностью с помощью компрессоров 14, 15 системы регулирования давления в шинах пар колес 4 и 5.
Наличие гидродинамических решеток 26, 27 со стороны шин пары колес 5 позволяет преодолевать водные преграды с большей скоростью, чем при их отсутствии, за счет перенаправлении потоков воды, формируемых задними колесами, в противоположную направлению движения платформы сторону. Гидродинамические решетки 27 и 28 являются пассивными устройствами, использующими для работы «паразитную» энергию потоков воды, производимых задними парами колес 5 на плаву. Такое техническое решение позволяет увеличивать скорость движения платформы на плаву без использования дополнительных механизмов, расходующих энергию батарей.
Вариант 2.
Комплектация платформы в варианте 2 осуществляется аналогично комплектации платформы варианта 1. В варианте 2 основной контейнер 23 не устанавливают. Свободное место по центру платформы используют в таком случае, для установки пассажирских мест или любого другого оборудования.
Управляют платформой, с помощью электронной системой управления, благодаря пульту 26, по протоколу беспроводной связи, (радиосвязи, лазерной связи или иной, с возможностью использования ретранслятора сигнала (дрона-посредника) для увеличения рабочего плеча платформы.
После сборки платформы батареи заряжают. Платформа настраивается и тестируется, после чего готова к эксплуатации в рабочем режиме.
Активируют электронный блок управления с помощью беспроводного пульта 26 управления. Управление платформой осуществляют аналогично управлению платформой по первому варианту с аналогичными основными командами.
Предлагаемая платформа является высокотехнологичной специальной автономной техникой на электроприводе для транспортировки различных грузов или людей в труднодоступных местах по сложному рельефу, слабонесущим грунтам и воде, при многократном использовании.
Кроме того предлагаемая платформа имеет возможность автоматического дистанционного управления.
Предлагаемая платформа имеет возможность формирования картины окружающего пространства.
Предлагаемая платформа удобна в использовании.
| название | год | авторы | номер документа |
|---|---|---|---|
| СНЕГОБОЛОТОХОД | 2023 |
|
RU2801955C1 |
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ ВЕРТОЛЕТОМ-САМОЛЕТОМ | 2017 |
|
RU2674742C1 |
| САМОХОДНАЯ ПОЛУПОГРУЖНАЯ ОКЕАНОЛОГИЧЕСКАЯ ИССЛЕДОВАТЕЛЬСКАЯ ПЛАТФОРМА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2006 |
|
RU2343084C2 |
| БРОНИРОВАННОЕ ТРАНСПОРТНОЕ СРЕДСТВО НА БАЗЕ РАЛЛИЙНОГО АВТОМОБИЛЯ | 2007 |
|
RU2338147C1 |
| БРОНИРОВАННЫЙ АВТОМОБИЛЬ | 2012 |
|
RU2514637C1 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2019 |
|
RU2737921C1 |
| Стартовый контейнер | 2018 |
|
RU2678381C1 |
| АМФИБИЙНОЕ ТРАНСПОРТНОЕ СРЕДСТВО НА ВОЗДУШНОЙ ПОДУШКЕ | 2006 |
|
RU2328390C2 |
| МАЛОГАБАРИТНЫЙ ГУСЕНИЧНЫЙ КАТЕР С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2023 |
|
RU2836745C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
Изобретение относится к вездеходным транспортным средствам. Варианты электрической транспортной платформы челнок выполнены симметричными относительно вертикальной продольной плоскости и выполнены на двухосном шасси, состоящем из корпуса, пары осей, каждая из осей оснащена парой колес. В конструкции колес использованы шины низкого давления. Корпус выполнен в форме пространственной рамы со смонтированными на её противоположных бортах двумя независимыми трансмиссиями, крыльями, боковыми отсеками, в которых размещены теплообменники, электроприводы, контроллеры, компрессоры системы регулировки давления в шинах колес. В центральной части корпуса установлен источник питания, над которым в направляющих установлен основной контейнер в виде прямоугольного параллелепипеда. На каждом крыле установлены приборы автономной навигации. Задние крылья оснащены гидродинамическими решетками. Платформа оборудована электронной системой управления, взаимосвязанной с пультом. Достигается многоразовое использование платформы в труднопроходимых рельефах местности с возможностью автоматического управления. 2 н. и 10 з.п. ф-лы, 2 ил.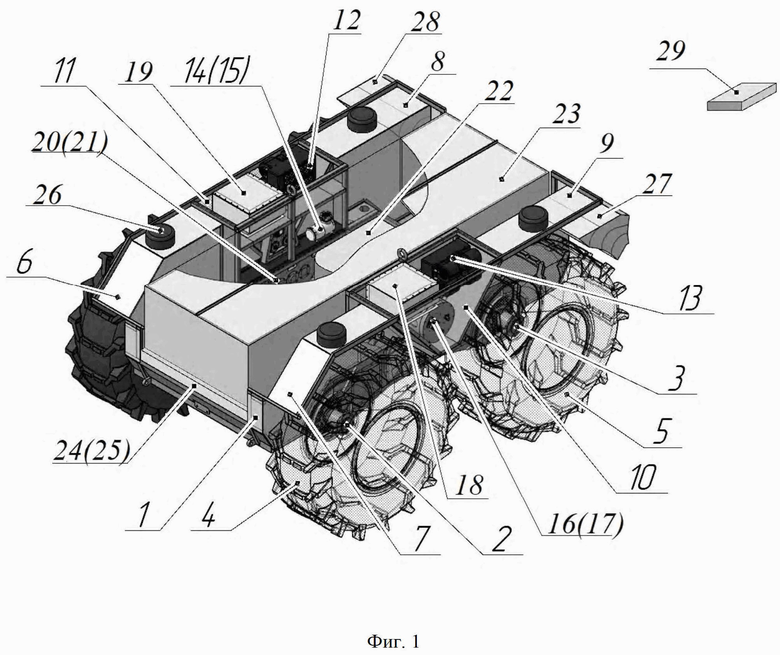
1. Электрическая транспортная платформа челнок, характеризующаяся тем, что платформа выполнена симметричной относительно вертикальной продольной плоскости, конструктивно выполнена на двухосном шасси, состоящем из корпуса, пары осей, каждая из осей оснащена парой колес, при этом в конструкции колес использованы шины низкого давления, корпус выполнен в форме пространственной рамы со смонтированными на её противоположных бортах двумя независимыми трансмиссиями, крыльями, боковыми отсеками, в которых размещены соответственно теплообменники, электроприводы, контроллеры, компрессоры системы регулировки давления в шинах колес, в центральной части корпуса установлен источник питания, над которым в направляющих установлен основной контейнер в виде прямоугольного параллелепипеда, длинная сторона которого выполнена не более габаритов платформы, оснащенный верхней крышкой или верхней и передней/задней крышками, платформа оснащена передним и задним узлами фиксации основного контейнера, кроме того, на каждом крыле установлены приборы автономной навигации, задние крылья оснащены гидродинамическими решетками, платформа оборудована электронной системой управления, взаимосвязанной с пультом.
2. Платформа по п.1, отличающаяся тем, что верхняя крышка или передняя/задняя крышки основного контейнера выполнены открываемыми.
3. Платформа по п.1, отличающаяся тем, что верхняя крышка или передняя/задняя крышки основного контейнера выполнены съёмными.
4. Платформа по п.1, отличающаяся тем, что электроприводы и независимые трансмиссии смонтированы на противоположных бортах платформы.
5. Платформа по п.1, отличающаяся тем, что источник питания выполнен в виде блока батарей и расположен снизу по центру платформы.
6. Платформа по п.1, отличающаяся тем, что оборудована гидродинамическими решетками для использования энергии «паразитных» потоков воды на плаву.
7. Платформа по п.1, отличающаяся тем, что оборудована средствами связи и устройствами автономной навигации.
8. Электрическая транспортная платформа челнок, характеризующаяся тем, что платформа выполнена симметричной относительно вертикальной продольной плоскости, конструктивно выполнена на двухосном шасси, состоящем из корпуса, пары осей, каждая из осей оснащена парой колес, при этом в конструкции колес использованы шины низкого давления, корпус выполнен в форме пространственной рамы, со смонтированными на её противоположных бортах двумя независимыми трансмиссиями, крыльями, боковыми отсеками, в которых размещены соответственно теплообменники, электроприводы, контроллеры, компрессоры системы регулировки давления в шинах колес, в центральной части корпуса установлен источник питания.
9. Платформа по п.8, отличающаяся тем, что электроприводы и независимые трансмиссии смонтированы на противоположных бортах платформы.
10. Платформа по п.8, отличающаяся тем, что источник питания выполнен в виде блока батарей и расположен снизу по центру платформы.
11. Платформа по п.8, отличающаяся тем, что оборудована гидродинамическими решеткам для использования энергии «паразитных» потоков воды на плаву.
12. Платформа по п.8, отличающаяся тем, что оборудована средствами связи и устройствами автономной навигации.
| ШАССИ МОБИЛЬНОГО ТРАНСПОРТНОГО ОБОРУДОВАНИЯ | 2004 |
|
RU2291811C2 |
| Беспилотный тягово-энергетический модуль сельскохозяйственного назначения и способ его агрегатирования с сельскохозяйственными машинами | 2022 |
|
RU2805880C1 |
| Станок для зачистки концов электрических проводов | 1955 |
|
SU104535A1 |
| УСТРОЙСТВО для ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ СМЕЩЕНИЙ БОКОВЫХ ПОРОД | 0 |
|
SU221624A1 |
| 0 |
|
SU168885A1 | |
| МАСКИРОВОЧНАЯ СЕТЬ | 2014 |
|
RU2546470C1 |
| US 7329161 B2, 12.02.2008. | |||

