ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
По настоящей заявке испрашивается приоритет от 28.05.2020 по заявке 202010466099. Изобретение относится к области робототехники, в частности, к способу компенсации силы тяжести, устройству и управляющему оборудованию для роботизированной руки.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области робототехники, в частности к способу, устройству и управляющему устройству для компенсации силы тяжести манипулятора.
УРОВЕНЬ ТЕХНИКИ
По мере того как промышленность по производству роботов-манипуляторов и промышленность по производству датчиков развиваются, роботы-манипуляторы не только обслуживают производственные линии, но также начинают постепенно входить в различные области жизни. Традиционные промышленные роботы-манипуляторы требуют наличия зоны безопасности, и персоналу строго запрещено входить в их рабочую зону во время работы во избежание травм. Однако в большинстве случаев обычного применения на практике имеются недостатки в установке безопасного диапазона, и эффективность эргономичной совместной работы человека и робота не является высокой. Для того чтобы рабочее пространство между людьми и машинами не было разделено, для достижения действительно высокой эффективности и высокой точности взаимодействия между людьми и машинами, разработаны совместные роботизированные руки. Роботизированные руки совместного типа обладают способностью воспринимать контактное усилие, способное реагировать на физический контакт человеческого тела с роботизированными руками, таким образом позволяя оператору и роботизированным рукам совместно использовать рабочее пространство. Появление роботизированных рук совместного типа значительно расширило применение роботизированных рук в домашних условиях, в образовательных целях, развлечениях, здравоохранении, высокопроизводительной производственной отрасли и т.д. Для улучшения различных аспектов жизни используются элементы роботизированных рук, которые являются эффективными, высокоточными и обладают высокой стабильностью.
Методика управления при нулевом усилии относится к роботу-манипулятору, который может перемещаться в соответствии с усилием, как если бы на него не воздействовал вес самого робота-манипулятора во время перемещения. Эта технология уменьшает трудоемкость обучения перетаскиванию и повышает плавность действий человека при управлении манипулятором. Для того чтобы робот-манипулятор мог выполнять управление при нулевом усилии с зажатым рабочим инструментом, необходимо отдельно откалибровать параметры корпуса робота-манипулятора и инструмента, а затем с помощью обратного проектирования точно вычислить массы и центроиды секций манипулятора и инструмента. Методика калибровки параметров корпуса манипулятора подробно описана в источнике информации «Идентификация динамической модели, используемой для робота KUKA LWR: подход обратного инжиниринга" (С. Газ, Ф. Flacco) и «Гравитационная компенсация для коллаборативного робота KUKA LBR IIWA через быстрый интерфейс робота» (С. Хоу, Й. Чжао), но при этом имеется меньше калибровочных данных для параметров оконечного инструмента.
В некоторых сложных применениях в работе роботизированной руке даже требуется заменить концевой инструмент для завершения работы. В этом случае, как роботизированный манипулятор может адаптивно компенсировать вес инструмента, гарантируя, таким образом, что управление с нулевым усилием может быть достигнуто различными оконечными инструментами, что становится ключом к тому, является ли работа взаимодействия плавной или нет.
Существующие решения для компенсации силы тяжести манипулятора обычно требуют использования весов для измерения массы оконечного инструмента и затем использования подвеса или опоры для измерения центроида инструмента. Измеренные данные затем вводятся в систему управления манипулятора, которая обеспечивает возможность компенсации веса на основании параметров инструмента, чтобы обеспечить возможность управления манипулятором с нулевым усилием. Однако, когда инструмент измеряют массу и центр масс инструмента, инструмент находится в состоянии, отделенном от системы, и измеряемыми параметрами легко пренебречь влиянием процесса установки на массу и центр масс, и только параметры одного инструмента могут быть компенсированы силой тяжести каждый раз, и процесс должен быть остановлен при переключении инструмента, и эффективность является низкой, когда множество инструментов должны быть часто переключены.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Одна из задач настоящего изобретения состоит в создании способа, устройства управления и считываемого носителя данных для адаптивной компенсации силы тяжести при множестве нагрузок манипулятора, уменьшении количества этапов работы, повышении эффективности и эффективности компенсации силы тяжести.
Для достижения вышеуказанной задачи в настоящей заявке используется следующее техническое решение.
Согласно первому изобретению группы, вариант осуществления настоящего изобретения обеспечивает способ адаптивной компенсации силы тяжести при множественных нагрузках для манипулятора, включающий в себя следующие этапы:
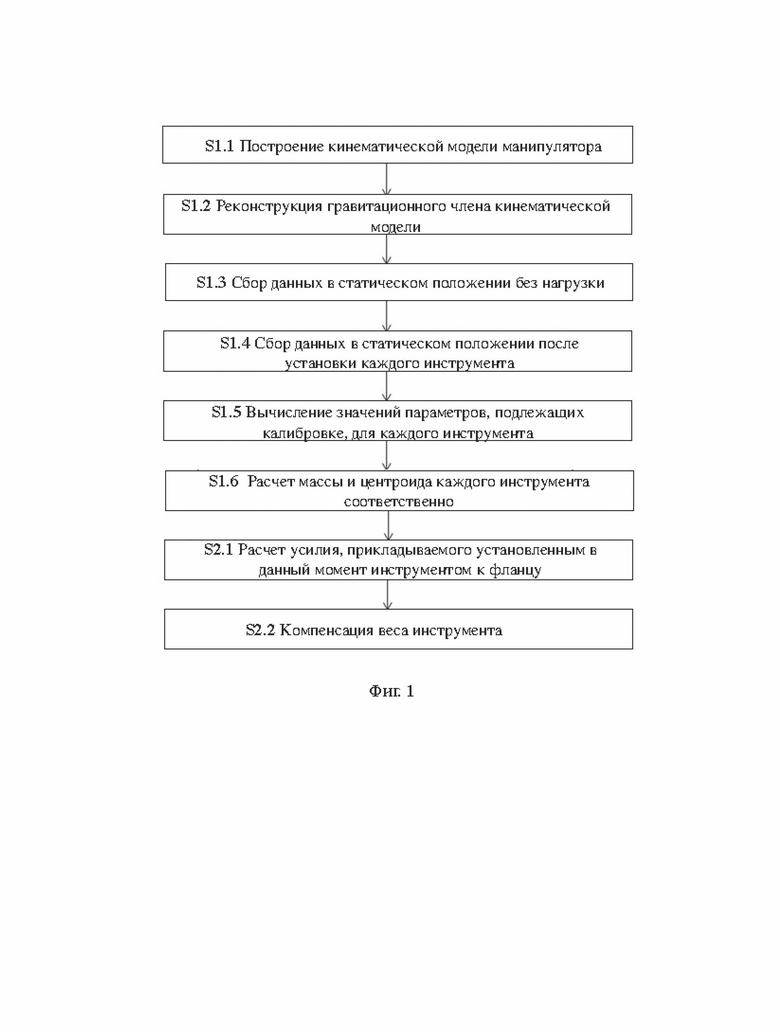
S1.1 - построение кинематической модели манипулятора;
S1.2 - реконструкция гравитационного члена кинематической модели;
S1.3 - сбор данных в статическом положении без нагрузки;
S1.4 - сбор данных в статическом положении после установки каждого инструмента;
S1.5 - вычисление значений параметров, подлежащих калибровке, для каждого инструмента;
S1.6 - расчет массы и центроида каждого инструмента соответственно;
S2.1 - расчет усилия, прикладываемого установленным в данный момент инструментом к фланцу;
S2.2 - компенсация веса инструмента.
В одном возможном варианте осуществления изобретения, на этапе S1.1, система координат сочленения манипулятора строится с использованием стандартного способа D-Н.
В одном возможном варианте осуществления изобретения на этапе S1.3 роботизированная рука перемещается в отсутствии нагрузки в любое несингулярное положение в рабочем пространстве, отбирая данные о положении сочленения и крутящего момента.
В одном возможном варианте осуществления изобретения на этапе S1.4 каждый инструмент устанавливают на конце манипулятора по отдельности, и этап S1.3 повторяют для отбора данных статического положения.
В одном возможном варианте осуществления изобретения на этапе S1.4 для каждого инструмента после его установки на конце манипулятора определяют допустимое рабочее пространство манипулятора, соответствующее инструменту, в соответствии с размером инструмента, и затем повторяют этап S1.3 для сбора данных в статическом положении инструмента на основании допустимого рабочего пространства.
В одном возможном варианте осуществления изобретения на этапе S1.5 выборочные данные, полученные на этапах S1.3 и S1.4, группируют в соответствии с инструментом, подставляя в гравитационный член, заменяя на этапе S1.2.
В одном возможном варианте осуществления изобретения на этапе S1.6 для каждого инструмента значения параметров, калиброванных при перемещении инструмента, сравниваются со значениями параметров, калиброванных без нагрузки, и масса и центроид инструмента рассчитываются на основании результата сравнения и корреляции между массой инструмента, центроида инструмента, массой конечного рычага в манипуляторе и центроидом конечного рычага.
Согласно второму изобретению группы, варианты осуществления настоящего изобретения предусматривают устройство адаптивной компенсации силы тяжести с несколькими нагрузками манипулятора, причем устройство содержит:
модуль построения модели, выполненный с возможностью создания кинематической модели манипулятора;
модуль реконструкции силы тяжести, выполненный с возможностью реконструкции гравитационных членов кинематической модели;
модуль сбора данных в положении, выполненный с возможностью сбора данных в статическом положении без нагрузки;
модуль сбора данных в положении, выполненный с возможностью сбора данных в статическом положении после установки каждого инструмента;
модуль калибровки параметров, выполненный с возможностью вычисления значений параметров, подлежащих настройке для каждого инструмента;
модуль вычисления параметров массы, выполненный с возможностью вычисления массы и центроида каждого инструмента соответственно;
модуль расчета внешней силы, выполненный с возможностью расчета силы, приложенной установленным в данный момент инструментом к фланцу;
модуль компенсации силы тяжести, выполненный с возможностью компенсации силы тяжести инструмента.
В одном возможном варианте осуществления изобретения модуль построения модели строит систему координат сочленения манипулятора с использованием стандартного способа D-H во время построения кинематической модели манипулятора.
В возможном варианте реализации изобретения, когда манипулятор не нагружен, модуль сбора данных в положении управляет перемещением манипулятора в любое несингулярное положение в рабочей области и производит сбор показаний положения шарнира и крутящего момента.
В одном возможном варианте осуществления изобретения, после установки каждого инструмента на конце манипулятора по отдельности, модуль сбора данных в положении определяет для каждого инструмента эффективное рабочее пространство, на текущий момент соответствующее инструменту манипулятора, в соответствии с размером инструмента, и затем многократно управляет манипулятором для перемещения в любое несингулярное положение в соответствующем эффективном рабочем пространстве на основании его определения, отбирая данные в положении сочленения и крутящего момента.
В одном возможном варианте осуществления изобретения модуль калибровки параметров группирует замеры, полученные модулем сбора данных в положении, по инструментам и последовательно подставляет их в гравитационные члены, полученные модулем гравитационной реконструкции, для вычисления значений параметров, подлежащих калибровке для каждого инструмента.
В возможном варианте осуществления изобретения модуль калибровки параметров группирует собранные данные, полученные модулем сбора данных в положении, в соответствии с инструментом и последовательно подставляет в гравитационный член, полученный модулем реконструкции силы тяжести для вычисления, для получения значений параметров, подлежащих калибровке для каждого инструмента.
В соответствии с третьим изобретением группы, обеспечивается устройство управления роботизированной руки, содержащее память, в которой хранится компьютерная программа, исполняемая на процессоре, и процессор, который при исполнении компьютерной программы реализует описанный выше способ адаптивной компенсации силы тяжести при множественных нагрузках для роботизированной руки.
В четвертом изобретении группы обеспечивается машиночитаемый носитель данных, на котором хранится компьютерная программа, которая при выполнении процессором выполняет вышеупомянутый способ адаптивной компенсации силы тяжести при множественных нагрузках для манипулятора.
Один из положительных эффектов вариантов осуществления настоящего изобретения включает в себя следующее. Система координат сочленения манипулятора строится посредством D-H способа, и положение центроида каждого сегмента манипулятора привязывается на основе системы координат сочленения. В исходном гравитационном члене, члены, связанные с позициями суставов, разделяются на члены, связанные с центром масс, и в процессе разделения параметры, подлежащие калибровке, должны быть соответствующим образом объединены, и разделенные члены помещаются в две матрицы, так что их умножение по-прежнему удовлетворяет исходному гравитационному члену. Затем замеряют статическое положение манипулятора в ненагруженном состоянии, после чего каждый инструмент устанавливают на конце манипулятора и замеряют статическое положение отдельно. После группирования различных инструментов, используемых для сбора данных, в гравитационные члены, значения объединенных параметров могут быть получены с использованием разложения по сингулярным значениям (SVD разложение), и, наконец, масса и центр масс инструмента могут быть извлечены из объединенных параметров с использованием способа разделения параметров объединенного объекта. Величина силы, прикладываемой к фланцу установленным в данный момент концевым инструментом, может быть вычислена на основании параметров калибровки в условиях отсутствия нагрузки и обратной связи по положению сустава в реальном времени. На основании измеренных внешних сил на фланце система может определить, какой инструмент в данный момент установлен на фланце, так что измерения внешних сил после компенсации веса инструмента могут быть выполнены непосредственно с использованием калиброванных значений параметров или с использованием полученных массы и центра масс в конфигурации манипулятора. В этом способе параметры инструмента получают посредством предварительного вычисления, что упрощает этапы работы во время фактического применения и значительно улучшает плавность совместной работы. Кроме того, благодаря использованию датчиков положения сочленения и момента для калибровки параметров инструмента, калиброванные параметры инструмента также лучше соответствуют кинематическим и динамическим характеристикам манипулятора, что улучшает характеристики управления при нулевом усилии.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - блок-схема, характеризующая способ адаптивной компенсации силы тяжести при множественных нагрузках для манипулятора, предусмотренный группой изобретений по настоящей заявке.
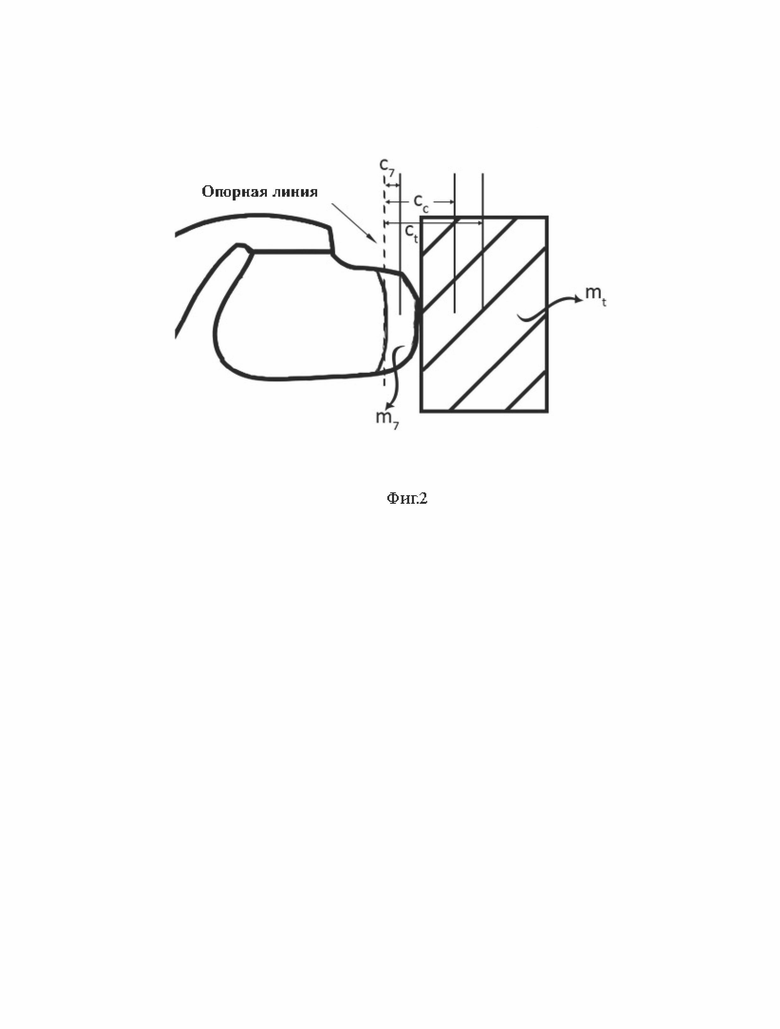
Фиг. 2 - представляет собой схематическое изображение, на котором показаны инструмент и концевая часть манипулятора для способа адаптивной компенсации силы тяжести при нескольких нагрузках для манипулятора, в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 3 - схематическое изображение принципа установки множества инструментов манипулятора для способа адаптивной компенсации силы тяжести при множестве нагрузок для манипулятора, обеспеченного вариантом осуществления настоящего изобретения.
Фиг. 4 - блок-схема, отображающая состав элементов устройства самоадаптивной компенсации силы тяжести с несколькими нагрузками манипулятора, обеспеченного вариантом осуществления настоящего изобретения.
ПРИМЕРЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Далее изобретение будет описано и проиллюстрировано со ссылкой на конкретные варианты осуществления и прилагаемые чертежи.
Как показано на фиг. 1-3, в полное уравнение динамики манипулятора включены член инерции, член центробежной силы и силы Кориолиса, член силы тяжести и член силы трения, где член инерции связан с ускорением сочленения, центробежная сила связана с членом силы Кориолиса и скоростью сочленения, член силы трения также связан со скоростью сочленения, и ускорение сочленения и скорость сочленения равны 0, когда манипулятор находится в статическом состоянии, так что исследования статического положения могут быть проведены только на членах силы тяжести. Построение уравнения динамики, содержащего гравитационные составляющие, требует в качестве входных данных положения сочленения и крутящие моменты манипулятора, и, таким образом, имеет определенные требования к аппаратному обеспечению. Используют робот KUKA LBR Med 7R 800 в качестве примера, манипулятор является семиосным координированным манипулятором, и каждый сустав снабжен высокоточным датчиком положения и крутящего момента, который соответствует требованиям к конфигурации аппаратного обеспечения манипулятора, в соответствии с настоящей заявкой. Фактическая работа объясняется на примере семиосного координированного робота KUKA LBR Med 7R 800.
S1.1: Была построена кинематическая модель манипулятора.
В одном возможном варианте осуществления изобретения при построении кинематической модели манипулятора система координат сочленения манипулятора строится с использованием классического метода Денавита-Хартенберга (D-H). (Кинематическая нотация для механики нижних пар на основе матриц, Дж. Денавит, Р.С. Хартенберг). Таблица параметров D-H для робота KUKA. LBR Med 7R 800 приведена ниже.
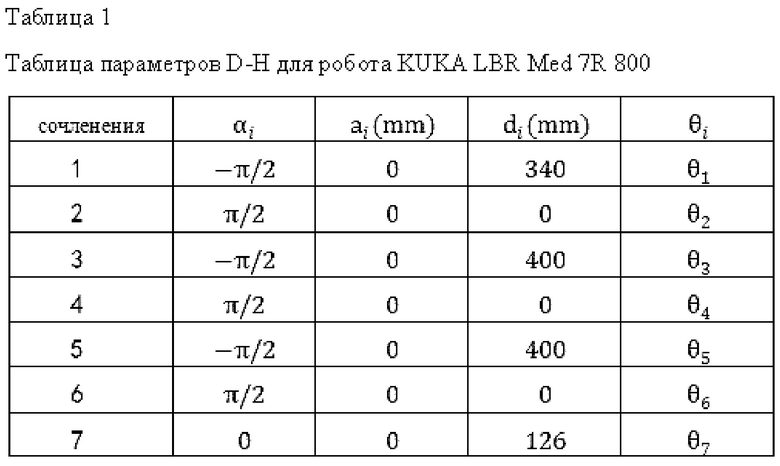
где αi угол поворота звена, ai длина звена, di расстояние отклонения звена, θi угол сочленения. После установки системы координат сочленений система координат центроида устанавливается по правилу для положения центроида каждого участка манипулятора. При установлении центроидной системы координат необходимо только убедиться, что начало системы координат находится в центроиде каждого плеча, и угол поворота может оставаться совпадающим с углом поворота (i+1)-го сочленения.
S1.2: Гравитационные составляющие динамической модели реконструируются.
В этом варианте осуществления изобретения для робота-манипулятора в статическом состоянии гравитационный член равен шарнирному моменту робота-манипулятора, и формула имеет вид:

Из формулы очевидно, что гравитационный член связан с углом θi сочленения, массой mi и центроидом ci, где масса mi и центроид ci непосредственно связаны с калибровкой инструмента и должны быть извлечены, поэтому гравитационный член G разделяют следующим образом:

Легко установить, что масса mi и центроид ci связаны в гравитационном члене и не могут быть разделены по отдельности. Таким образом, чтобы иметь матрицу А параметров, подлежащих масштабированию, параметры масштабирования должны стать объединенными mi и ci посредством разумного объединения параметров, удовлетворяя при этом уравнению. При объединении параметров число параметров в А должно быть максимально уменьшено, чтобы избежать попадания решения системы линейных уравнений в локальный оптимум, и таким образом, обеспечить лучший результат калибровки.
S1.3: Сбор данных в статическом положении без нагрузки.
В этом варианте осуществления изобретения подтверждается, что манипулятор находится в ненагруженном состоянии, манипулятор перемещается в несингулярное положение рабочего пространства, и, после того, как каждое сочленение остается неподвижным, собираются данные в положении и моментов сочленений. Этап сбора данных повторяют так, чтобы точки сбора данных были максимально распределены по всему рабочему пространству. Во время сбора данных небольшое количество точек может быть очень близко к сингулярному положению, которое должно быть удалено из набора собранных данных, поскольку отсутствие свободы манипулятора в сингулярном положении может приводить к неточной обратной связи по крутящему моменту.
Обратимся к фиг. 3, где S1.4: После установки каждого инструмента производится сбор данных в статическом положении.
В этом варианте осуществления изобретения соответствующие инструменты последовательно устанавливаются на конце манипулятора робота, и этап повторения S1.3 выполняет цикл сбора данных в движении для каждого инструмента, и набор данных после исключения сингулярного положения сохраняется. Поскольку сам инструмент имеет определенные размеры, и диапазон перемещения манипулятора ограничен, и в процессе перемещения могут произойти несчастные случаи, связанные со столкновением с корпусом манипулятора или периферийными препятствиями, эффективное рабочее пространство должно быть повторно подтверждено во время сбора данных в статическом положении инструмента, и рациональная траектория перемещения спроектирована так, чтобы точка сбора данных находилась в рабочем пространстве, максимально заполненном, насколько это возможно, предотвращая возникновение столкновения. Таким образом, в возможной реализации этого варианта осуществления изобретения для каждого инструмента после его установки на конце манипулятора определяют допустимое рабочее пространство манипулятора, соответствующее инструменту и в соответствии с его размером, и затем повторяют S1.3 этап сбора данных в статическом положении инструмента на основании допустимого рабочего пространства.
S1.5: Вычисляют значения параметров, подлежащих калибровке, для каждого инструмента.
В настоящем варианте осуществления изобретения все собранные данные группируются по инструменту при выполнении этапа S1.5, и каждый набор данных укладывается в систему уравнений, полученную в S 1.2 следующим образом:

где положения суставов в наборе данных будут укладываться в матрицу  а моменты соединения суставов будут включены в матрицу
а моменты соединения суставов будут включены в матрицу  Поскольку матрицы
Поскольку матрицы  и
и  были идентифицированы, матрица А (m, с) параметров, подлежащих калибровке, может быть получена путем решения системы линейных уравнений посредством SVD разложения. Матрица
были идентифицированы, матрица А (m, с) параметров, подлежащих калибровке, может быть получена путем решения системы линейных уравнений посредством SVD разложения. Матрица  может быть разложена следующим образом:
может быть разложена следующим образом:

где левая и правая сингулярные матрицы U и V обе являются ортогональными матрицами, так что для гиперопределенного уравнения  пусть
пусть 
 тогда получается новое выражение
тогда получается новое выражение

В вышеприведенном выражении Σ является диагональной матрицей, все диагональные элементы которой являются сингулярными значениями  и
и  матрицы
матрицы  и, таким образом, может быть получено X. Наконец, параметры, подлежащие масштабированию, в матрице А можно найти в соответствии:
и, таким образом, может быть получено X. Наконец, параметры, подлежащие масштабированию, в матрице А можно найти в соответствии:
S1.6: Вычисляют массу и центр масс каждого инструмента по отдельности.
В этом варианте осуществления изобретения выполнение процесса этапа S1.5 требует, чтобы инструмент, который является твердым телом, выполняют калибровку параметров после установки на конце манипулятора, и, таким образом, масса и центр масс последнего из калиброванных параметров являются, по существу, параметрами после объединения крайнего элемента манипулятора и инструмента. Таким образом, масса и центр масс инструмента могут быть определены путем сравнения параметров калибровки инструмента и параметров калибровки без нагрузки, а затем путем объединения уравнения центра масс комплексной системы, используемого для характеристики корреляции между массой и центром масс инструмента и массой и центром масс концевого манипулятора в манипуляторе робота. Таким образом, в возможной реализации этого варианта осуществления изобретения для каждого инструмента возможно сравнить значения параметров, калиброванных при перемещении инструмента, можно сравнивать со значениями параметров, калиброванных при отсутствии нагрузки, и массу и центр масс инструмента можно вычислить на основании результата сравнения и корреляции между массой инструмента, центром масс инструмента, массой концевой части в манипуляторе и центроида концевой части.
На фиг. 2, где в качестве примера использована концевая часть робота KUKA LBR Med 7R 800, формула центроида множественной системы, соответствующая системе робототехнического манипулятора после фиксации инструмента, имеет следующий вид:
где cc - центроид объединенного инструмента и концевой части,  и
и  - масса и центроид инструмента, соответственно, m7 и c7 - масса и центроид концевой части, соответственно. При объединении приведенной выше формулы с параметрическим выражением калибровки можно определить массу
- масса и центроид инструмента, соответственно, m7 и c7 - масса и центроид концевой части, соответственно. При объединении приведенной выше формулы с параметрическим выражением калибровки можно определить массу  и центроид
и центроид  инструмента.
инструмента.
В то же время, в настоящей заявке разработана система, в которой для компенсации силы тяжести применяется автоматически выбираемый набор параметров инструмента. Система использует выходные сигналы крутящего момента сочленения и датчика положения в качестве входных сигналов для системы, вычисляя внутри системы силу, прикладываемую текущим инструментом к концевой части манипулятора, для определения типа зафиксированного инструмента, и повторно используя параметры, вычисленные в S1, для выполнения компенсации силы тяжести. Подробные процедуры осуществления описаны ниже.
S2.1: Вычисляется сила, прикладываемая установленным в данный момент инструментом к фланцу (концу манипулятора).
В этом варианте осуществления изобретения, момент сочленения  обеспеченный корпусом манипулятора в текущей позиции, может быть вычислен с использованием параметров, калиброванных в ненагруженном состоянии. Вычитание измеренного в реальном времени момента сустава
обеспеченный корпусом манипулятора в текущей позиции, может быть вычислен с использованием параметров, калиброванных в ненагруженном состоянии. Вычитание измеренного в реальном времени момента сустава  из
из  дает момент сустава
дает момент сустава  который является результатом внешней силы. При повторном использовании матрицы Якоби внешние силы могут быть отображены из пространства сочленения в рабочее пространство, и вычисляется внешняя сила, которая воздействовала на концевую часть (фланец) манипулятора в рабочем пространстве.
который является результатом внешней силы. При повторном использовании матрицы Якоби внешние силы могут быть отображены из пространства сочленения в рабочее пространство, и вычисляется внешняя сила, которая воздействовала на концевую часть (фланец) манипулятора в рабочем пространстве.
S2.2: Компенсация силы тяжести инструмента.
В этом варианте осуществления изобретения различие между инструментами будет отражаться в величине внешней силы. Например, если разница в массе между инструментами является значительной, и численное значение в направлении XYZ внешней силы может быть использовано в качестве основы для различения инструментов. Если разница в массе инструментов мала, а разница центра масс велика, то в качестве отличительного фактора может быть принят во внимание крутящий момент в направлении внешней силы ABC. Для инструмента, масса которого не отличается значительно от массы центроида, можно рассматривать его как инструмент, который позволяет получить лучший эффект компенсации при использовании одного и того же набора параметров калибровки. Для манипулятора, который позволяет автоматически выполнять компенсацию силы тяжести с вводом параметров инструмента, масса и центр масс инструмента, вычисленные на этапе S1.6, могут быть непосредственно записаны в конфигурацию манипулятора, позволяя встроенной программе манипулятора вычислять внешнюю силу, приложенную к инструменту. Для манипулятора без функции компенсации силы тяжести параметры, откалиброванные на этапе S1.5, могут быть непосредственно применены для вычисления внешней силы, которая действует на инструмент в данный момент. Таким образом, внешняя сила, действующая на манипулятор, является силой после компенсации силы тяжести инструмента, и стратегия управления, использующая внешнюю силу в качестве входных данных, также будет игнорировать влияние инструмента, то есть будет выполняться управление с нулевым усилием.
Кроме того, как показано на Фиг. 4, настоящая группа изобретений также обеспечивает устройство 100 адаптивной компенсации силы тяжести при нескольких нагрузках для манипулятора, чтобы выполнять способ адаптивной компенсации силы тяжести при нескольких нагрузках, описанный выше, с использованием различных модулей реализации функций, включенных в устройство 100 адаптивной гравитационной компенсации при нескольких нагрузках. В данном случае, устройство 100 адаптивной компенсации силы тяжести, работающее с множеством нагрузок, включает в себя модуль 110 построения модели, модуль 120 реконструкции силы тяжести, модуль 130 сбора данных в положении, модуль 140 калибровки параметров, модуль 150 вычисления параметров массы, модуль 160 расчета внешней силы и модуль 170 компенсации силы тяжести.
Модуль 110 построения модели выполнен с возможностью создания кинематической модели манипулятора.
Модуль 120 реконструкции силы тяжести выполнен с возможностью восстановления гравитационных членов кинетической модели.
Модуль 130 сбора данных в положении выполнен с возможностью сбора данных в статическом положении без нагрузки.
Модуль 130 сбора данных в положении также выполнен с возможностью сбора данных в статическом положении после установки каждого инструмента.
Модуль 140 калибровки параметров выполнен с возможностью вычисления значений параметров, подлежащих калибровке, для каждого инструмента соответственно.
Модуль 150 вычисления параметра массы выполнен с возможностью вычисления массы и центра масс каждого инструмента, соответственно.
Модуль 160 расчета внешней силы выполнен с возможностью вычисления силы, прикладываемой установленным в данный момент инструментом к фланцу.
Модуль 170 компенсации силы тяжести выполнен с возможностью компенсации веса инструмента.
В одном возможном варианте осуществления настоящего изобретения модуль 110 построения модели строит систему координат сочленения манипулятора с использованием стандартного способа D-H в ходе построения кинематической модели манипулятора.
В возможном варианте осуществления настоящего изобретения модуль 130 сбора данных в положении управляет работой манипулятора в любое несингулярное положение в рабочем пространстве, и берет замеры положения сочленения и крутящего момента, когда манипулятор не нагружен.
В возможном варианте осуществления настоящего изобретения после установки каждого инструмента на конце манипулятора модуль 130 сбора данных в положении определяет для каждого инструмента эффективное рабочее пространство, на текущий момент соответствующее инструменту манипулятора, согласно размеру инструмента, и затем многократно управляет манипулятором для перемещения в любое несингулярное положение в соответствующем эффективном рабочем пространстве на основании определенного эффективного рабочего пространства, собирает данные в положении сочленения и крутящего момента.
В возможном варианте осуществления настоящего изобретения модуль 140 калибровки параметров группирует выбранные данные, полученные модулем сбора данных в положении, в соответствии с инструментами и последовательно заменяет их данными, полученными модулем реконструкции силы тяжести для вычисления, чтобы получить значения параметров, подлежащих калибровке для каждого инструмента.
Следует отметить, что устройство 100 самоадаптивной компенсации силы тяжести с несколькими нагрузками, предложенное в вариантах осуществления настоящего изобретения, имеет те же основные принципы и технические эффекты, что и вышеупомянутый способ адаптивной компенсации силы тяжести с несколькими нагрузками, и, для краткости описания, в части, не упомянутой в этом варианте осуществления изобретения, можно обратиться к описанию, относящемуся к способу адаптивной компенсации силы тяжести с несколькими нагрузками.
Кроме того, также предложено устройство управления роботизированной рукой, содержащее память и процессор. Память может включать в себя один или более компьютерных программных продуктов, которые могут включать в себя различные формы считываемых носителей данных, таких как энергозависимая память и/или энергонезависимая память. Энергозависимая память может включать в себя, например, оперативное запоминающее устройство (ОЗУ) и/или кэш-память, и т.д. Энергонезависимая память может включать в себя, например, постоянное запоминающее устройство (ПЗУ), жесткий диск, флэш-память и т.д. Одна или более компьютерных программ могут храниться на читаемом носителе информации, и процессор может исполнять компьютерные программы для реализации функций, представленных вышеописанным способом адаптивной гравитационной компенсации при множественных нагрузках манипулятора и/или других требуемых функций. Различные прикладные программы и различные данные, такие как различные данные, используемые и/или сгенерированные прикладной программой, могут также храниться на считываемом носителе данных.
Процессор может быть реализован в виде аппаратных средств, по меньшей мере, одного из цифрового сигнального процессора, программируемой в полевых условиях вентильной матрицы и программируемой логической матрицы, при этом процессор может представлять собой центральный процессор (ЦП) или любую комбинацию нескольких из других форм процессоров, обладающих возможностями обработки данных и/или возможностями исполнения команд, может управлять другими компонентами в устройстве управления для выполнения требуемых функций. Процессор может исполнять компьютерную программу, сохраненную в памяти, соответственно, для реализации функций, представленных компьютерной программой.
В одном возможном варианте осуществления настоящего изобретения устройство 100 адаптивной компенсации силы тяжести при нескольких нагрузках манипулятора может храниться в памяти устройства управления в виде программного обеспечения или встроенного программного обеспечения, и процессор устройства управления выполняет программные функции, содержащиеся в устройстве 100 адаптивной компенсации силы тяжести при нескольких нагрузках, и компьютерную программу для реализации функций, соответствующих способу адаптивной компенсации силы тяжести при нескольких нагрузках манипулятора.
В заключение, в вышеупомянутом решении система координат сочленения манипулятора строится с помощью D-H способа, и положение центроида каждого сегмента манипулятора привязывается на основании системы координат сочленения. В исходном гравитационном члене, члены, связанные с позициями суставов, разделяются на члены, связанные с центром масс, и в процессе разделения параметры, подлежащие калибровке, должны быть соответствующим образом объединены, и разделенные члены помещаются в две матрицы, так что их умножение по-прежнему удовлетворяет исходному гравитационному члену. Затем замеряют в статическом положении манипулятора в ненагруженном состоянии, после чего каждый инструмент устанавливают на конце манипулятора и замеряют в статическом положении отдельно. После группирования различных инструментов, используемых для сбора данных, в гравитационные члены, значения объединенных параметров могут быть получены с использованием SVD разложения, и, наконец, масса и центр масс инструмента могут быть извлечены из объединенных параметров с использованием способа разделения параметров объединенного объекта. Величина силы, прикладываемой к фланцу установленным в данный момент концевым инструментом, может быть вычислена на основании параметров калибровки в условиях отсутствия нагрузки и обратной связи по положению сустава в реальном времени. На основании измеренных внешних сил на фланце система может определить, какой инструмент в данный момент установлен на фланце, так что измерения внешних сил после компенсации веса инструмента могут быть выполнены непосредственно с использованием калиброванных значений параметров или с использованием полученных массы и центра масс в конфигурации манипулятора. В этом способе параметры инструмента получают посредством предварительного вычисления, что упрощает этапы работы во время фактического применения и значительно улучшается плавность совместной работы. Кроме того, благодаря использованию датчиков положения сочленения и крутящего момента для калибровки параметров инструмента, калиброванные параметры инструмента также лучше соответствуют кинематическим и динамическим характеристикам манипулятора, что улучшает характеристики управления при нулевом усилии.
В заключение, следует отметить, что вышеприведенные варианты осуществления изобретения используются только для того, чтобы иллюстрировать технические решения по настоящей заявке, а не ограничивать объем охраны, хотя настоящая заявка подробно описывает технические решения со ссылкой на альтернативные варианты осуществления изобретения, специалисты в данной области техники должны понимать, что модификации или эквивалентные замены могут вноситься в технические решения по настоящей заявке без изменения сущности изобретений группы по настоящей заявке.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Варианты осуществления настоящего изобретения обеспечивают способ, устройство управления и считываемый носитель информации для адаптивной компенсации силы тяжести и веса при множестве нагрузок манипулятора, создают систему координат сочленения манипулятора посредством D-H способа и затем привязывают положение центроида каждого сегмента манипулятора к системе координат сочленения. В исходном гравитационном члене, члены, связанные с позициями суставов, разделяются на члены, связанные с центром масс, и в процессе разделения параметры, подлежащие калибровке, должны быть соответствующим образом объединены, и разделенные члены помещаются в две матрицы, так что их умножение по-прежнему удовлетворяет исходному гравитационному члену. Затем производят замеры в статическом положении манипулятора в ненагруженном состоянии, после чего каждый инструмент устанавливают на концевой части манипулятора и производят замеры в статическом положении отдельно. После группирования различных инструментов, используемых для сбора данных, в гравитационные члены, значения объединенных параметров могут быть получены с использованием SVD разложения, и, наконец, масса и центр масс инструмента могут быть извлечены из объединенных параметров с использованием способа разделения параметров объединенного объекта. Величина силы, прикладываемой к фланцу от установленного в данный момент концевого инструмента, может быть вычислена на основании параметров калибровки в условиях отсутствия нагрузки и обратной связи по положению сустава в реальном времени. На основании измеренных, действующих на фланец внешних сил система может определить, какой инструмент в данный момент зафиксирован на фланце, так что измерения внешних сил после компенсации веса инструмента могут быть выполнены непосредственно с использованием калиброванных значений параметров или с использованием полученных массы и центра масс в конфигурации манипулятора. В этом способе параметры инструмента получают посредством предварительного вычисления, что упрощает этапы работы во время фактического применения и значительно улучшает плавность совместной работы. Кроме того, благодаря использованию датчиков положения сочленения и крутящего момента для калибровки параметров инструмента, калиброванные параметры инструмента также лучше соответствуют кинематическим и динамическим характеристикам манипулятора, что улучшает характеристики управления при нулевом усилии.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОЦЕНКА УСИЛИЯ ДЛЯ РОБОТИЗИРОВАННОЙ ХИРУРГИЧЕСКОЙ СИСТЕМЫ МИНИМАЛЬНОГО ИНВАЗИВНОГО ВМЕШАТЕЛЬСТВА | 2007 |
|
RU2462342C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА МИНИМАЛЬНОГО ИНВАЗИВНОГО ВМЕШАТЕЛЬСТВА И СПОСОБ ЕЕ УПРАВЛЕНИЯ | 2012 |
|
RU2518806C2 |
| Способ и система для определения по меньшей мере одного свойства манипулятора | 2014 |
|
RU2672654C2 |
| Способ и система определения по меньшей мере одной характеристики сочленения | 2013 |
|
RU2667938C2 |
| Система и способ калибровки кинематических параметров роботизированного манипулятора | 2022 |
|
RU2810082C1 |
| СПОСОБ КАЛИБРОВКИ И ПРОГРАММИРОВАНИЯ РОБОТА | 2012 |
|
RU2605393C2 |
| ХИРУРГИЧЕСКИЙ РОБОТ ДЛЯ ОРТОПЕДИЧЕСКИХ ВМЕШАТЕЛЬСТВ | 2017 |
|
RU2746742C1 |
| ОЦЕНКА УСИЛИЯ НА РОБОТОХИРУРГИЧЕСКОМ ИНСТРУМЕНТЕ | 2019 |
|
RU2721462C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
Изобретение относится к области робототехники, в частности к способу адаптивной компенсации силы тяжести для манипулятора с несколькими нагрузками. Для эффективной компенсации силы тяжести осуществляют следующие этапы: S1.1 - построение кинематической модели манипулятора, S1.2 - восстановление составляющей силы тяжести кинематической модели, S1.3 - сбор данных в статическом положении без нагрузки, S1.4 - сбор данных в статическом положении после установки каждого инструмента, S1.5 - вычисление значений параметров, подлежащих калибровке, для каждого инструмента, S1.6 - расчет массы и центра масс, соответствующих каждому из инструментов, S2.1 - расчет силы, прикладываемой установленным в данный момент инструментом к фланцу, S2.2 - компенсация силы тяжести для инструмента. 1 табл., 4 ил.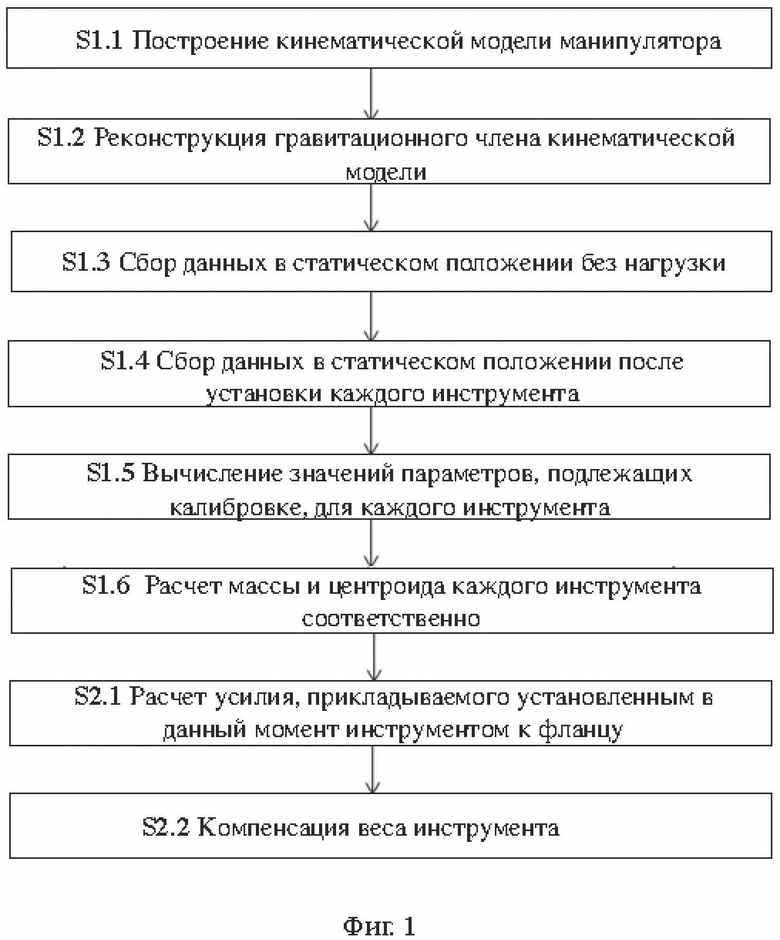
Способ адаптивной компенсации силы тяжести для манипулятора с несколькими нагрузками, содержащий этапы, на которых осуществляют:
S1.1 построение кинематической модели манипулятора;
S1.2 восстановление составляющей силы тяжести кинематической модели;
S1.3 сбор данных в статическом положении без нагрузки;
S1.4 сбор данных в статическом положении после установки каждого инструмента;
S1.5 вычисление значений параметров, подлежащих калибровке, для каждого инструмента;
S1.6 расчет массы и центра масс, соответствующих каждому из инструментов;
S2.1 расчет силы, прикладываемой установленным в данный момент инструментом к фланцу;
S2.2 компенсация силы тяжести для инструмента;
где на этапе S1.1 систему координат сочленений манипулятора строят с использованием классического метода Денавита–Хартенберга;
после установки системы координат сочленений, для положения центра масс каждого сегмента манипулятора, по заданным правилам, устанавливают систему координат центров масс;
так, что при установке системы координат центров масс, начало системы координат находится в центре масс каждого плеча;
где на этапе S1.2 реализуют способ восстановления составляющей силы тяжести динамической модели следующим образом:
для манипулятора в статическом состоянии составляющую силы тяжести G принимают равной моменту τ сочленения манипулятора согласно формуле
G (θ, m, c) = τ, где составляющая силы тяжести зависит от характеризующих сочленение угла θi, массы mi и центра масс ci;
где на этапе S1.3, в условиях отсутствия нагрузки, манипулятор переводят в любое несингулярное положение в рабочем пространстве, со сбором данных о положениях сочленений и считыванием крутящих моментов;
повторяют шаг сбора данных таким образом, чтобы точки сбора данных были максимально возможным образом распределены в рабочем пространстве;
где на этапе S1.4 каждый из инструментов устанавливают по отдельности на конце манипулятора и повторяют этап S1.3 сбора данных в статическом положении;
где на этапе S1.5, для каждого инструмента, для вычисления значений параметров, подлежащих калибровке, используют способ, согласно которому:
группируют все собранные данные, соответствующие инструменту, а каждую из групп данных подставляют в систему уравнений, полученную на этапе S1.2 следующим образом:
где положения сочленений в наборе данных подставляют в матрицу  и матрицу
и матрицу  раскладывают следующим образом:
раскладывают следующим образом:

где на этапе S1.6 массу и центр масс инструмента определяют путем сравнения параметров, калиброванных при наличии инструмента, и параметров, калиброванных без нагрузки, и последующего объединения с формулой для центра масс множественной системы;
где на этапе S2.1 параметры, калиброванные в состоянии без нагрузки, используют для вычисления момента сочленения  , сформированного корпусом манипулятора в текущем положении;
, сформированного корпусом манипулятора в текущем положении;
используют момент  сочленения, измеренный в реальном времени за вычетом для определения момента
сочленения, измеренный в реальном времени за вычетом для определения момента  сочленения, вызванного приложением внешней силы;
сочленения, вызванного приложением внешней силы;
используют матрицу Якоби для отображения внешней силы из пространства сочленений в рабочее пространство и вычисляют внешнюю силу на конце манипулятора в рабочем пространстве.
| CN 110666794 A, 10.01.2020 | |||
| Hou Che et al | |||
| Gravity Compensation of KUKA LBR IIWA Through Fast Robot Interface | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| CN 110561438 A, 13.12.2019 | |||
| WO 2009088828 A1, 16.07.2009. | |||
