ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области измерительного оборудования, точнее - к способам позиционирования измерительного оборудования, в частности, калибровочного робота с помощью QR-кодов. Способ может применяться для юстировки измерительного оборудования в процессе проведения измерений.
УРОВЕНЬ ТЕХНИКИ
Тестер микросхем FORMULA® HF Ultra, показанный на фиг. 1, представляет собой универсальную контрольно-измерительную систему для функционального и параметрического контроля ультравысокочастотных сверхбольших интегральных микросхем (СБИС) (https://form.ru/products/chip/hf-ultra/).
Тестер применяется для испытания и контроль качества на всех стадиях жизненного цикла СБИС, включая:
- испытания и исследования вновь разработанных типов СБИС;
- производственные и приемочные испытания серийной продукции (квалификационные, периодические, отбракованные, приемосдаточные);
- сертификационные испытания;
- входной контроль.
Тестер проходит настройку и многочисленные поверки при изготовлении (начальная настройка и поверка) и при эксплуатации (периодические поверки и настройки).
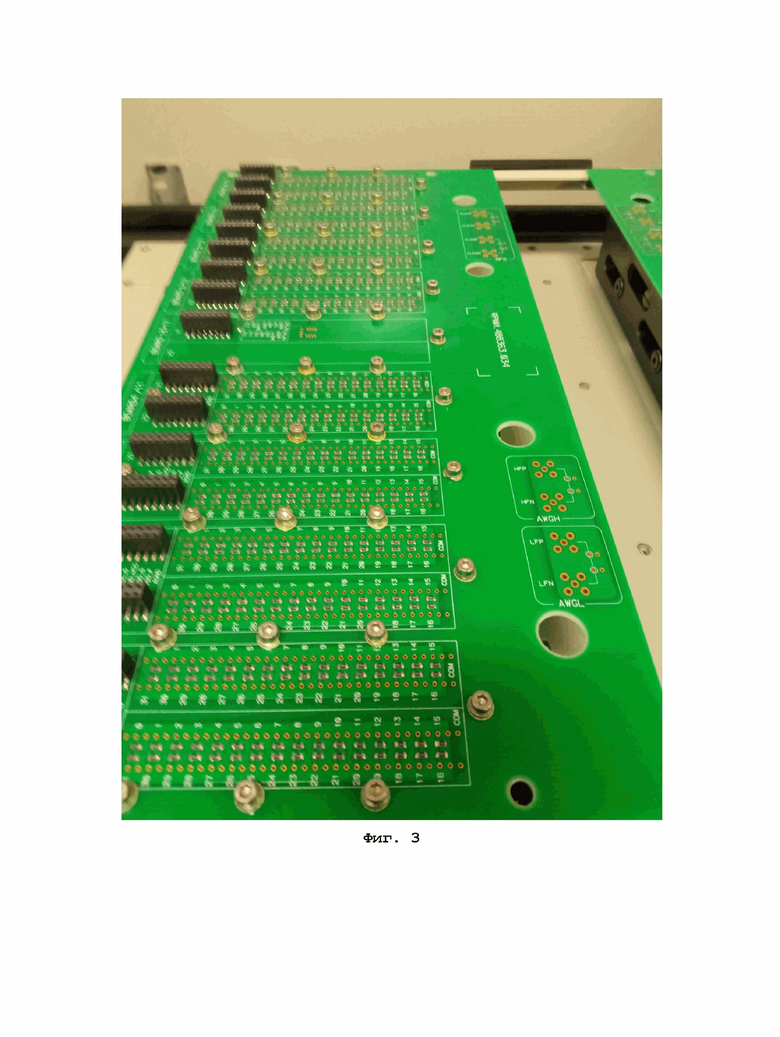
При этом тестер имеет большое количество выходов каналов (на фиг. 2 показана лишь половина из 1024 выходов каналов тестера). При проведении поверки на контакты тестера устанавливается переходная плата (фиг. 3), которая позволяет непосредственно подключаться к его каналам.
При настройке тестера необходимо проверить все его 1024 канала, которые могут синхронно выдавать (принимать) сигналы. Для этого используют измерительное оборудование (например, осциллограф): на канале тестера формируют серию одиночных импульсов и измеряют положения их фронтов относительно переднего фронта эталонного сигнала. Эту процедуру осуществляют для каждого канала, переставляя щупы вручную. Поверку считают успешной, если отклонение измеренного времени от среднего, для всех каналов, находится в заданном диапазоне.
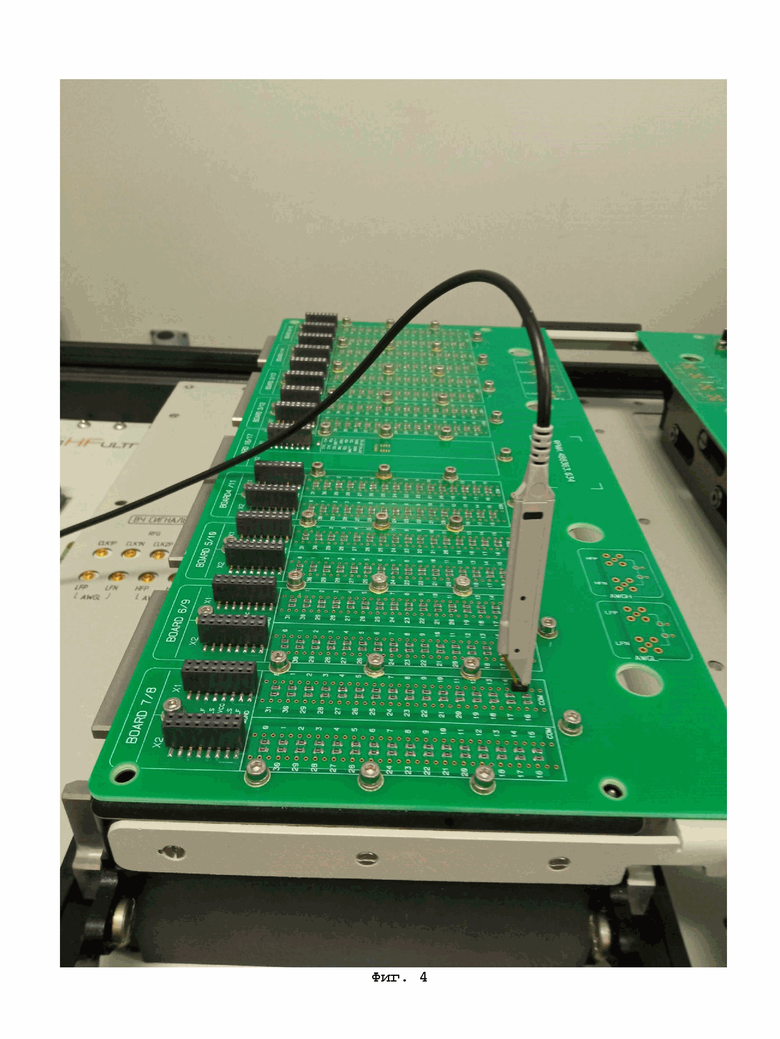
Учитывая большое количество каналов, необходимость переставлять щуп вручную (см. фиг. 4) приводит с одной стороны к тому, что поверка/настройка занимает много времени, с другой стороны это приводит к тому, что процесс является чрезвычайно трудоемким, вызывает сильное утомление у оператора и чреват ошибками.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения, состоит в ускорении процесса поверки/настройки тестера, в сокращении количества механических действий оператора в процессе поверки/настройки.
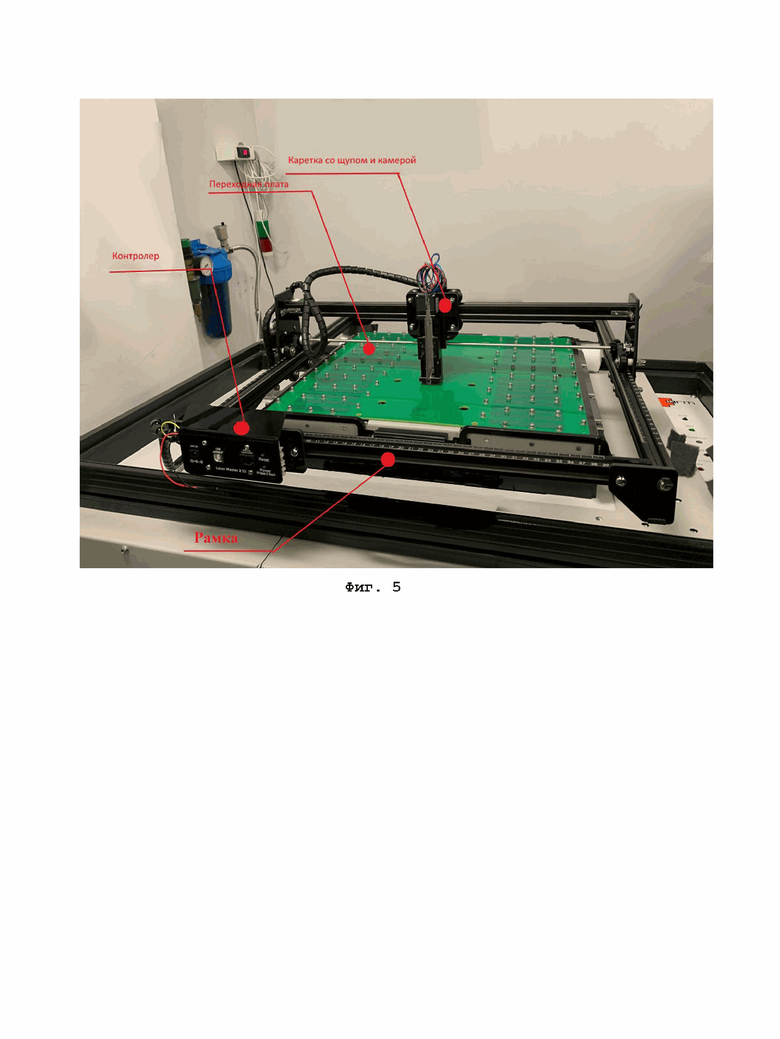
Одним из наиболее очевидных направлений при автоматизации процесса поверки, могло бы быть использование съемного манипулятора для подключения щупа к заданному каналу по команде, который устанавливается на тестер (в горизонтальном положении, как показано на фиг. 5).
Однако, поскольку манипулятор съемный, при его установке неизбежно возникают погрешность (смещение, перекос, поворот, кривизна).
Вследствие этого с помощью легких манипуляторов простой конструкции (с легкой нежесткой рамой) не удается обеспечить приемлемую точность и надежность работы на всей площади контактного поля.
Приемлемой точности позиционирования удавалось добиться только за счет применения высокоточных манипуляторов с жесткой массивной рамой и сложной конструкцией (с прецизионными валами и шарико-винтовыми передачами, которые обычно применяются во фрезерных станках). Однако, помимо усложнения и удорожания конструкции, использование высокоточных манипуляторов приводит к увеличению веса и материалоемкости (высокоточный манипулятор вместе со станиной может весить более 30 кг). Установка высокоточных манипуляторов на тестер не только требует от оператора значительных физических усилий, но может приводить к деформации и поломке тестера.
Как неожиданно было установлено, нанесение меток на плату с переходными отверстиями и оснащение каретки манипулятора оптическим сенсором (или камерой) для распознавания положения маркеров позволяет корректировать нештатные сдвиги и ошибки позиционирования манипулятора с учетом известного положения маркеров и добиваться приемлемой точности и надежности работы не только при использовании высокоточных манипуляторов, но и при использовании легких манипуляторов простой конструкции, например, манипуляторов с алюминиевыми направляющими и ремнями для перемещения каретки с измерительным щупом (см. фиг. 5).
Меткам, которые наносят на переходную плату соответствует информация об их геометрическом положении (например, относительно краев платы). Маркеры имеют подходящую, для распознавания с помощью камеры или оптического сенсора форму. Камера или оптический сенсор располагают на каретке манипулятора таким образом, что при проходе каретки рядом с маркером по известным координатам маркера может быть определено точное положение самой каретки. Одному маркеру может соответствовать информация о геометрическом положении только по одной или по обеим осям координат.
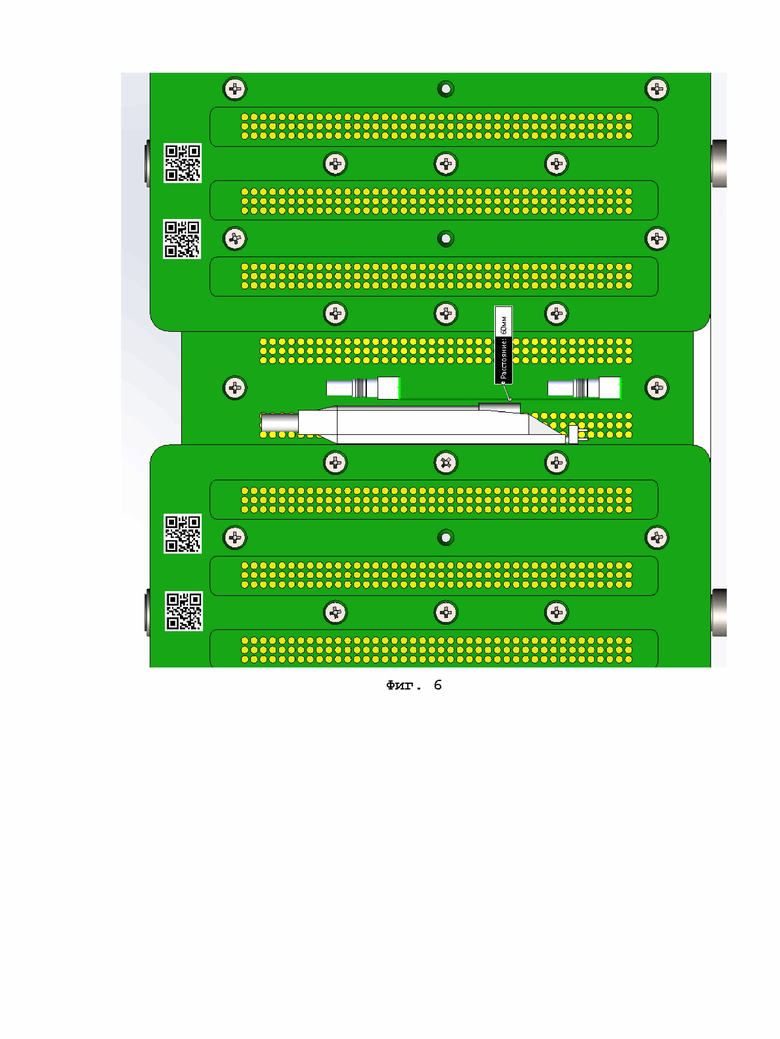
В качестве меток и носителя информации можно использовать, например, QR-код (как показано на фиг. 6). Альтернативно могут быть использованы и другие виды меток, например, штрих-код или крест на контрастном фоне или любые другие хорошо различимые с помощью оптического сенсора или камеры рисунки или объекты. В качестве метки могут быть использованы контактные площадки на переходной плате, при условии, что их координаты точно известны.
Предпочтительно, когда каждая метка, нанесенная на плату и представляющая собой QR-код, уникальна. Метка может содержать информацию либо об идентификаторе, которому соответствует информация о координате, записанная в память блока управления манипулятором, либо метка сама по себе может содержать информацию о своих координатах (например, о координатах центра среднего квадрата) и/или может содержать иную информацию, например, о номере платы тестера и своих координатах.
Для уточнения (юстировки, периодического позиционирования) положения измерительного щупа, каретку перемещают в область установки QR-кода, с тем расчетом, чтобы он попал в объектив камеры.
Контроллер камеры осуществляет захват изображения и его декодирование.
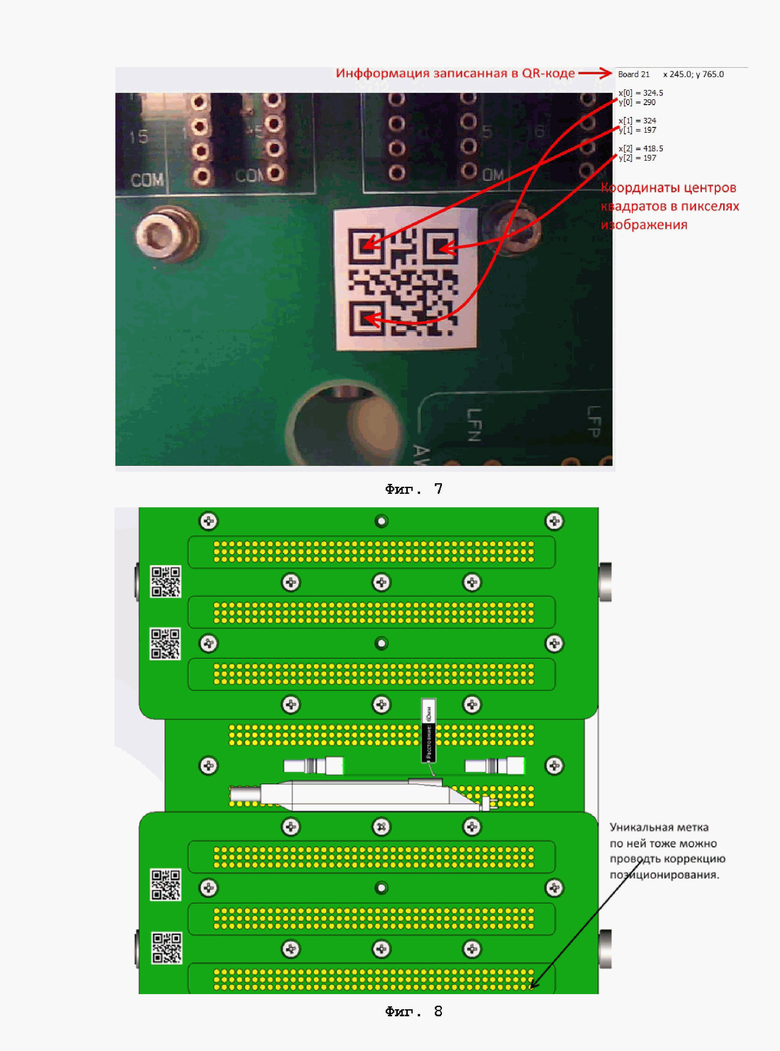
Используя информацию о координатах метки на переходной плате, и координаты квадратов в пикселях изображения (размеры пикселей известны), вычисляют текущее положение каретки, как показано на фиг. 7.
Коррекция сведений о положении каретки с учетом известных координат метки позволяет повысить точность позиционирования на всей площади контактного поля переходной платы и использовать для перемещения щупа легкие манипуляторы простой конструкции с присущими им перекосами и смещениями, возникающими при установке на тестер.
Таким образом, в соответствии с одним из аспектов настоящего изобретения, оно относится к переходной плате для тестера сверхбольших интегральных микросхем, которая имеет первую сторону, снабженную соединительными элементами, размещенными с возможностью электрического контакта с упомянутыми выходами и вторую сторону, снабженную входами для электрического подключения упомянутого щупа, электрически соединенными с соответствующими соединительными элементами, и снабжена, по меньшей мере, одной меткой, пригодной для считывания камерой, установленной на каретке манипулятора, выполненного с возможностью перемещения измерительного щупа для подключения к измерительному прибору для поверки или настройки тестера.
В одной из предпочтительных форм выполнения метка может содержать в себе информацию о своем местоположении на вышеупомянутой переходной плате. Эта форма выполнения имеет преимущества по сравнению с вариантом выполнения, когда метка представляет собой лишь простой идентификатор, поскольку не требуется отдельно вводить в блок управления координаты метки, соответствующие идентификатору.
В еще одном своем аспекте изобретение относится к съемному манипулятору для поверки или настройки тестера сверхбольших интегральных микросхем, имеющего группы выходов, расположенных, по существу, в одной плоскости, включающий в себя:
измерительный щуп, выполненный с возможностью подключения к измерительному прибору для поверки или настройки тестера,
каретку, выполненную с возможностью перемещения упомянутого щупа в сторону вышеупомянутой переходной платы для его подключения к упомянутым входам на вышеупомянутой переходной плате и в обратном направлении и
блок управления.
Упомянутая каретка манипулятора снабжена камерой, в рабочем положении обращенной в сторону вышеупомянутой переходной платы.
Упомянутый блок управления манипулятора, выполнен с возможностью перемещения упомянутой каретки в положение считывания вышеупомянутой метки на упомянутой переходной плате и учета координат упомянутой метки при перемещении каретки из положения считывания вышеупомянутой метки в положение, при котором упомянутый щуп располагается напротив упомянутых входов на вышеупомянутой переходной плате.
В соответствии с еще одним своим аспектом настоящее изобретение относится к способу поверки или настройки тестера сверхбольших интегральных микросхем, в котором используют:
вышеописанную переходную плату,
вышеописанный съемный манипулятор,
в котором
устанавливают вышеописанную плату на тестер таким образом, что соединительные элементы упомянутой платы приходят в электрический контакт с соответствующими выходами тестера,
устанавливают съемный манипулятор по пункту 3 таким образом, чтобы его каретка имела возможность перемещения во всей плоскости упомянутой переходной платы,
перемещают каретку упомянутого манипулятора в положение считывания метки,
корректируют систему координат блока управления с учетом координат метки,
перемещают каретку упомянутого манипулятора в плоскости упомянутой платы с учетом скорректированных координат.
В одном из вариантов осуществления способа упомянутое положение считывания метки заранее неизвестно и перемещение каретки упомянутого манипулятора в положение считывания осуществляют сканированием всей плоскости упомянутой платы до тех пор, пока метка не попадет в поле зрения камеры.
КРАТКОЕ ОПИСАНИЕ ФИГУР
На фиг. 1 представлена фотография тестера микросхем FORMULA® HF Ultra - универсальной контрольно-измерительной системы для функционального и параметрического контроля ультравысокочастотных СБИС.
На фиг. 2 представлена фотография выходов каналов тестера (половина).
На фиг. 3 представлена фотография платы с переходными отверстиями для подключения к каналам тестера.
На фиг. 4 представлена фотография платы с фиг. 3 с Измерительным щупом, подключенным к каналу тестера.
На фиг. 5 представлена фотография манипулятора, установленного на тестер с фиг.1 (тестер уложен горизонтально).
На фиг. 6 изображена переходная плата с нанесенными на нее метками, представляющими собой qr-коды.
На фиг. 7 представлена фотография метки в виде qr-кода, нанесенного на переходную плату и содержащего информацию о своем собственном местоположении на переходной плате.
На фиг. 8 представлена фотография, иллюстрирующая один из частных вариантов осуществления изобретения, согласно которому в качестве метки служит один из выводов на переходной платы с заранее известным точным местоположением. Относительное положение вывода также заранее известно, в связи с чем становится возможно подвести камеру в положение, при котором метка попадает в поле ее зрения и отличить ее от других похожих выводов.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В одной из предпочтительных форм осуществления поверки или настройки тестера сверхбольших интегральных микросхем (показанного на фиг. 1) используют переходную плату, изображенную на фиг. 3 и съемный манипулятор, изображенный на фиг. 5.
Вначале располагают тестер горизонтально и устанавливают соединительную плату таким образом, что ее соединительные элементы приходят в электрический контакт с соответствующими выходами тестера.
Затем к тестеру прикрепляют съемный манипулятор таким образом, чтобы его каретка имела возможность перемещения во всей плоскости упомянутой переходной платы.
Манипулятор состоит из трех направляющих. Первая служит для перемещения каретки с измерительным щупом слева направо с помощью ременной передачи. На других двух (боковых) направляющих закреплены концы первой направляющей таким образом, что они имеют возможность одновременно перемещаться по ним с помощью ременной передачи. В целом механизм перемещения щупа может быть аналогичен механизму, который применяется в планшетных плоттерах.
Далее перемещают каретку манипулятора в положение считывания метки.
Определяют координаты метки. Для этого точные координаты метки либо должны быть заранее помещены в память блока управления манипулятором, либо сам метка может содержать информацию о своих точных координатах, например, в том случае, если она представляет собой qr-код, как показано на фиг. 6.
Наконец, корректируют систему координат блока управления с учетом точных координат метки.
На фиг. 7 проиллюстрирована корректировка каретки с учетом точных координат, содержащихся в qr-коде на переходной плате.
Xcam, Ycam - координаты камеры.
Исходные данные:
1. Положение QR-кода на переходной плате.
Xq, Yq - Координаты центра кода.
2. Размер кода на плате.
Sq - расстояние между центрами квадратов (по горизонтали и вертикали одинаковое).
3. Разрешение камеры.
Xm, Ym - размер изображения по x и у.
4. Растровое изображение с камеры.
x[i], y[i], i=0-2 - координаты положения центров квадратов кода в пикселях.
Допущения:
1. Геометрические искажения изображения незначительны.
2. Камера установлена правильно (оси соответствуют движению каретки, изображение не зеркальное, отсутствует поворот).
Определяем:
Положение центра QR-кода в пикселях:
Qpx=(х[2]+(х[0]+х[1])/2)/2;
Qpy=(у[0]+(у[1]+у[2])/2)/2;
Смещение центра QR-кода (в пикселях) относительно центра изображения:
Spx=Qpx-(Xm-1)/2;
Spy=Qpy-(Ym-1)/2;
Размер пикселя изображения:
Rpx=Sq/(x[2]-(x[0]+x[1])/2);
Rpx=Sq/(y[0]-(y[1]+y[2])/2);
Rp=(Rpx+Rpy)/2;
Тогда координаты камеры:
Xcam=Xq-Spx*Rp;
Ycam=Yq-Spy*Rp;
Далее при перемещении каретки к каналам тестера каретку упомянутого манипулятора перемещают в плоскости упомянутой платы с учетом скорректированных координат.
Предложенный способ облегчает процесс калибровки и увеличивает точность позиционирования, что позволяет повысить производительность и повысить качество работы. Предлагаемый способ позволяет
- использовать менее точные манипуляторы для автоматической поверки/настройки тестера;
- уменьшить время, необходимое для поверки/настройки тестера, снизить вероятность ошибок оператора.


Изобретение относится к области измерительной техники, а именно к позиционированию измерительного оборудования, в частности калибровочного робота. Сущность: способ поверки или настройки тестера сверхбольших интегральных микросхем, характеризующийся тем, что в нем используют переходную плату и съемный манипулятор. Устанавливают плату на тестер таким образом, что соединительные элементы платы приходят в электрический контакт с соответствующими выходами тестера. Устанавливают съемный манипулятор со щупом таким образом, чтобы его каретка имела возможность перемещения во всей плоскости переходной платы. Перемещают каретку манипулятора в положение считывания метки, выполненной с возможностью получения информации о ее координатах на переходной плате и пригодной для считывания камерой, установленной на каретке манипулятора. Корректируют систему координат блока управления с учетом координат метки и перемещают каретку манипулятора в плоскости платы с учетом скорректированных координат. Технический результат: ускорение процесса поверки/настройки тестера, сокращение количества механических действий оператора в процессе поверки/настройки. 3 н. и 2 з.п. ф-лы, 8 ил.
1. Переходная плата для тестера сверхбольших интегральных микросхем, характеризующаяся тем, что она
имеет первую сторону, снабженную соединительными элементами, размещенными с возможностью электрического контакта с выходами тестера, и вторую сторону, снабженную входами для электрического подключения измерительного щупа, электрически соединенными с соответствующими соединительными элементами, и
снабжена по меньшей мере одной меткой, выполненной с возможностью получения информации о ее координатах на переходной плате и пригодной для считывания камерой, установленной на каретке манипулятора, выполненного с возможностью перемещения измерительного щупа в сторону переходной платы для его подключения к входам на переходной плате и в обратном направлении.
2. Плата по п. 1, в которой упомянутая метка содержит в себе информацию о своем местоположении на вышеупомянутой переходной плате.
3. Съемный манипулятор для поверки или настройки тестера сверхбольших интегральных микросхем, имеющего группы выходов, расположенных, по существу, в одной плоскости, включающий в себя:
измерительный щуп, выполненный с возможностью подключения к измерительному прибору для поверки или настройки тестера,
каретку, выполненную с возможностью перемещения упомянутого щупа в сторону переходной платы по любому из пп. 1 или 2 для его подключения к упомянутым входам на переходной плате по любому из пп. 1 или 2 и в обратном направлении, и
блок управления,
в котором
упомянутая каретка снабжена камерой, в рабочем положении обращенной в сторону переходной платы по любому из пп. 1 или 2,
упомянутый блок управления выполнен с возможностью перемещения упомянутой каретки в положение считывания вышеупомянутой метки на переходной плате по любому из пп. 1 или 2 и учета координат упомянутой метки при перемещении каретки из положения считывания вышеупомянутой метки в положение, при котором упомянутый щуп располагается напротив входов на переходной плате по любому из пп. 1 или 2.
4. Способ поверки или настройки тестера сверхбольших интегральных микросхем, характеризующийся тем, что в нем используют
переходную плату по любому из пп. 1 или 2,
съемный манипулятор по п. 3,
в котором
устанавливают плату на тестер таким образом, что соединительные элементы упомянутой платы приходят в электрический контакт с соответствующими выходами тестера,
устанавливают съемный манипулятор по п. 3 таким образом, чтобы его каретка имела возможность перемещения во всей плоскости упомянутой переходной платы,
перемещают каретку упомянутого манипулятора в положение считывания метки,
корректируют систему координат блока управления с учетом координат метки,
перемещают каретку упомянутого манипулятора в плоскости упомянутой платы с учетом скорректированных координат.
5. Способ по п. 4, в котором упомянутое положение считывания метки заранее неизвестно и перемещение каретки упомянутого манипулятора в положение считывания осуществляют сканированием всей плоскости упомянутой платы.
| WO 2020108352 A1, 04.06.2020 | |||
| KR 1020090045418 A, 07.05.2009 | |||
| Устройство для герметизациипОлыХ издЕлий | 1977 |
|
SU842438A1 |
| КОНТАКТНАЯ ТАРЕЛКА | 0 |
|
SU176244A1 |
| US 9024899 B2, 05.05.2015. | |||
