ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области электроники, а точнее, к контрольно-измерительному оборудованию для интегральных схем (ИС); еще точнее - к системе механического подключения, которая применяется для совмещения и подключения контрольно-измерительного оборудования (далее - «тестер») и автоматического раскладчика микросхем (далее - «хендлера»).
УРОВЕНЬ ТЕХНИКИ
При автоматическом измерении и последующей разбраковке электронных устройств, таких как полупроводники или интегральные схемы (ИС), применяют манипуляторы для размещения и подключения проверяемого устройства - объекта контроля- к оборудованию контрольно-измерительному.
Сам процесс измерения и контроля обеспечивается Тестером, который включает в себя измерительный блок с выведенными требуемыми электрическими сигналами. Измерительный блок, как правило, имеет большие габариты и вес.
Существующие системы предусматривают манипулятор типа «рука» или позиционер типа «стол», которые легко и точно могут перемещать измерительный блок. Обычно пользователю приходится долго перемещать манипулятор или позиционер, чтобы добиться необходимой точности выравнивания измерительного блока. Перед подключением оси всех электрических соединений измерительного блока и хендлера должны быть вначале точно совмещены во избежание повреждения при последующем встречном перемещении. Когда все оси электрических соединений измерительного блока и хендлера точно совмещены, говорят, что измерительный блок и хендлер «выровнены». После этого их можно подключать, тем самым обеспечивая возможность автоматического размещения и подключения к Тестеру объектов контроля с помощью хендлера и последующей их разбраковки. Далее измерительный блок фиксируется или удерживается с помощью манипулятора или позиционера в статичном положении.
Из патента США 6377062 известно устройство для совмещения осей электрических соединений. Однако, в нем подвижной частью является «плавающий» интерфейсный узел (обозначенный поз. 64 на фиг. 10 в указанном патенте), закрепленный через подпружиненные стойки на опорной пластине 24. Контактные разъемы 32 крепятся к фиксирующей пластине 28, которая отталкивается от опорной пластины 24 с помощью гидравлического поршня 80.
Недостаток известного устройства состоит в том, что поскольку опорная пластина жестко крепится к тестеру (13), а подвижным является интерфейсный узел (64), подключение требует очень точного предварительного позиционирования.
Еще один недостаток состоит в том, что для поджима фиксирующей пластины (28) необходим гидравлический поршень (80) (тогда как в предлагаемом решении и позиционирование и поджим осуществляется одним манипулятором).
Из патента США №7221175 также известна система стыковки, позволяющая совмещать оси электрических соединений. В известной системе выравнивание тестера при стыковке относительно хендлера осуществляют за счет множества штырей, входящих в стыковочный узел 100 (см. фиг. 11 и 12 в указанном патенте). Выравнивание тестера относительно хендлера при стыковке происходит за счет корректирующих механических воздействий стыковочного узла: стыковочный узел 100 крепится к тестеру и при вхождении в него стыковочных штифтов 200, закрепленных на хендлере, наклон тестера относительно манипулятора меняется для обеспечения параллельности хендлеру, что требует относительно высоких усилий, т.к. тестер тяжелый. Это может приводить к быстрому износу, изгибу и разрушению штифтов.
В предлагаемом решении тестер жестко закреплен на манипуляторе, а наклон и ограниченное линейное перемещение по трем плоскостям (X, Y, Z) осуществляется только за счет прижимного устройства с оснасткой для установки проверяемого устройства (DUT), прикрепленное к тестеру демпфирующими опорами. Масса прижимного и проверяемого устройств и, как следствие, усилия, необходимы для их смещения относительно тестера и хендлера сравнительно невелики, что позволяет избежать повреждения и уменьшить износ направляющих элементов.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является создание системы для стыковки тестера и хендлера, свободного от вышеупомянутых недостатков.
Технический результат, обеспечиваемый при использовании изобретения состоит в том, что уменьшаются трудозатраты оператора, необходимые для подключения тестера и хендлера, уменьшается время стыковки.
Поставленная задача решена благодаря тому, что предлагаемая система механического подключения 2 и хендлера 10 содержит:
стыковочную плиту 11, установленную на хендлер 10, и снабженную предварительными ловителями 12,
прижимное устройство 1, установленное на тестер 2, включающее:
(i) плиту прижимного устройства 17 с жестко установленным на нем кронштейном 6 для измерительных модулей, подпружиненное относительно тестера 2 и снабженное отверстиями для предварительных ловителей 12,
(ii) направляющие 3 для основания и
(iii) направляющие 7 для кронштейна 6,
(iv) точные ловители 13.
Направляющие 3 для основания расположены таким образом, что их продольные оси в отсутствие внешних воздействий располагается, по существу, под прямым углом к основанию, при этом они посредством шарниров 5 (направляющие 3) одним своим концом соединены с основанием, а другим - с тестером 2 таким образом, что шарниры 5 обеспечивают возможность отклонения продольной оси направляющих 3 от прямого угла с плоскостью основания и выполнены (направляющие 3) с возможностью поступательного перемещения основания относительно их продольной оси между крайними положениями (с наибольшим и наименьшим расстоянием между основанием и тестером 2).
Направляющие 7 для кронштейна 6 одним своим концом нежестко с гарантированным зазором соединены с кронштейном 6, а другим концом - жестко с измерительным модулем 9 с возможностью отклонения центрирующих отверстий кронштейна 6 относительно продольной оси направляющих 7 и возможностью поступательного перемещения кронштейна 6 относительно их продольной оси между крайними положениями (с наибольшим и наименьшим расстоянием между кронштейном 6 и измерительным модулем 9).
Предварительные ловители 12 выполнены в виде штырей, установленных по существу под прямым углом к стыковочной плите 11 и имеющих проксимальный конец с диаметром окружности, описанной вокруг поперечного сечения d1, дистальный конец с диаметром окружности, описанной вокруг поперечного сечения d2 и расширение на дистальном конце с диаметром окружности, описанной вокруг поперечного сечения в наиболее широкой части D большим, чем d1 и d2.
Упомянутые отверстия для предварительных ловителей 12, имеют диаметр вписанной окружности D.
Точные ловители 13 имеют проксимальную часть цилиндрической формы и сужающуюся дистальную часть, при этом они расположены таким образом, что при совмещении наиболее широкой части упомянутых расширений предварительных ловителей 12 с соответствующими отверстиями в основании блокируются перемещения основания в радиальных направлениях относительно курса тестера 2, тогда как просветы сечений соответствующих отверстий в хендлере 10 совмещаются с осями точных ловителей 13.
Расширения предварительных ловителей 12 расположены таким образом, чтобы в положении, когда дистальная часть точных ловителей располагается рядом с просветами соответствующих отверстий в хендлере 10, наиболее широкая часть предварительных ловителей 12 диаметром D располагалась вне соответствующих отверстий в основании, тем самым обеспечивая возможность смещения основания в радиальных направлениях относительно курса тестера 2.
Как будет понятно среднему специалисту в данной области техники, достижение технического результата обеспечивается системой механического подключения, реализующей «плавающее » относительно тестера соединение прижимного устройства с оснасткой для установки проверяемого устройства (DUT), за счет демпфирующей базовой плиты прижимного устройства, с позиционирующими отверстиями для предварительных ловителей, и демпфирующими кронштейнами измерительных модулей, жестко крепящихся к базовой плите, которые позволяют менять угол наклона к горизонту в двух плоскостях, а также осуществляют ограниченное линейное перемещение по трем плоскостям (X, Y, Z), а также стыковочной плиты устанавливаемой на хендлер, с предварительными ловителями, ориентирующим прижимное устройство (с оснасткой DUT) по угловому положению относительно основных осей симметрии хендлера (X, Y) и обеспечивающих заданное отклонение от параллельности при совмещении.
Иными словами, система механического подключения в виде прижимного устройства с оснасткой для установки проверяемого устройства (DUT) 1 устанавливается на тестер 2 на подпружиненных шарнирных опорах, представляющих собой направляющие 3 с пружинами 4 и шарнирные поворотные узлы крепления 5, посредством которых прижимное устройство (с оснасткой DUT) скользит вдоль направляющих и меняет угол наклона к горизонту в двух плоскостях, а также осуществляет ограниченное линейное перемещение по трем плоскостям (X, Y, Z). Кронштейны измерительных модулей 6, с установленными блоками контактов, с проводами, кабелями или шлейфами, подключенными к измерительным модулям 9, жестко крепятся к демпфирующей плите прижимного устройства 1, а к измерительному модулю крепятся с помощью направляющих 7 с пружинами 8, посредством которых кронштейн, вместе с демпфирующей плитой прижимного устройства, скользит вдоль направляющих измерительного модуля и меняет угол наклона к измерительному модулю в двух плоскостях, а также осуществляет ограниченное линейное перемещение по трем плоскостям (X, Y, Z).
Таким образом, на прижимное устройство с кронштейнами измерительных модулей, с блоками контактов, через которые транслируется сигнал от измерительных модулей, монтируется оснастка для установки проверяемого устройства (DUT), а само прижимное устройство установлено на тестер через демпфирующие опоры нежестко, как бы «плавает», что позволяет быстро, без больших усилий и дополнительных точных манипуляций, осуществлять механическое подключение тестера к хендлеру (docking).
В одной из предпочтительных форм выполнения основание может быть подпружинено относительно тестера 2 посредством спиральновитых пружин 4, расположенных на оси направляющих 3.
В еще одной предпочтительной форме выполнения основание может быть подпружинено относительно тестера 2 посредством спиральновитых пружин 8, расположенных на оси направляющих 7.
Настоящее изобретение может применяться для подключения систем контрольно-измерительных и автоматического раскладчика микросхем - хендлера.
Необходимо понимать, что в настоящем тексте изобретение охарактеризовано только такими признаками, которые достаточны для решения поставленной задачи, реализации назначения и достижения выбранного технического результата; специального упоминания всех без исключения признаков и утилитарных характеристик изобретения не требуется, если специалистам должно быть известно, что изделия того же рода обладают такими признаками и утилитарными характеристиками и без них не реализуется основное назначение; тем более не требуется ограничивать обобщенные признаки какими-либо конкретными вариантами, если таковые должны быть известны специалистам и (или) могут быть подобраны по известным правилам.
Конструкция и использование устройства наглядно иллюстрируется фигурами 1-10 на примере частных и конкретных вариантов воплощения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
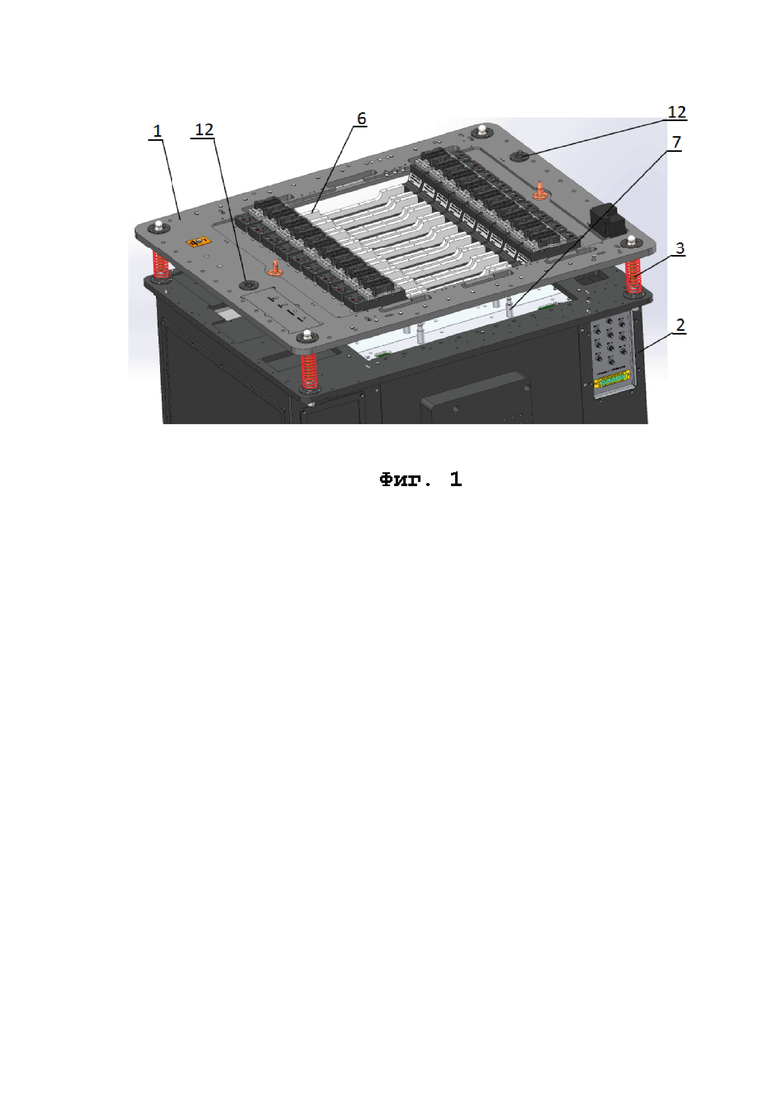
На фиг. 1 схематично изображена система механического подключения. На изображении в углах прижимного устройства видны направляющие 3, изображенные на фиг. 2 и направляющие 7, изображенные на фиг. 3.
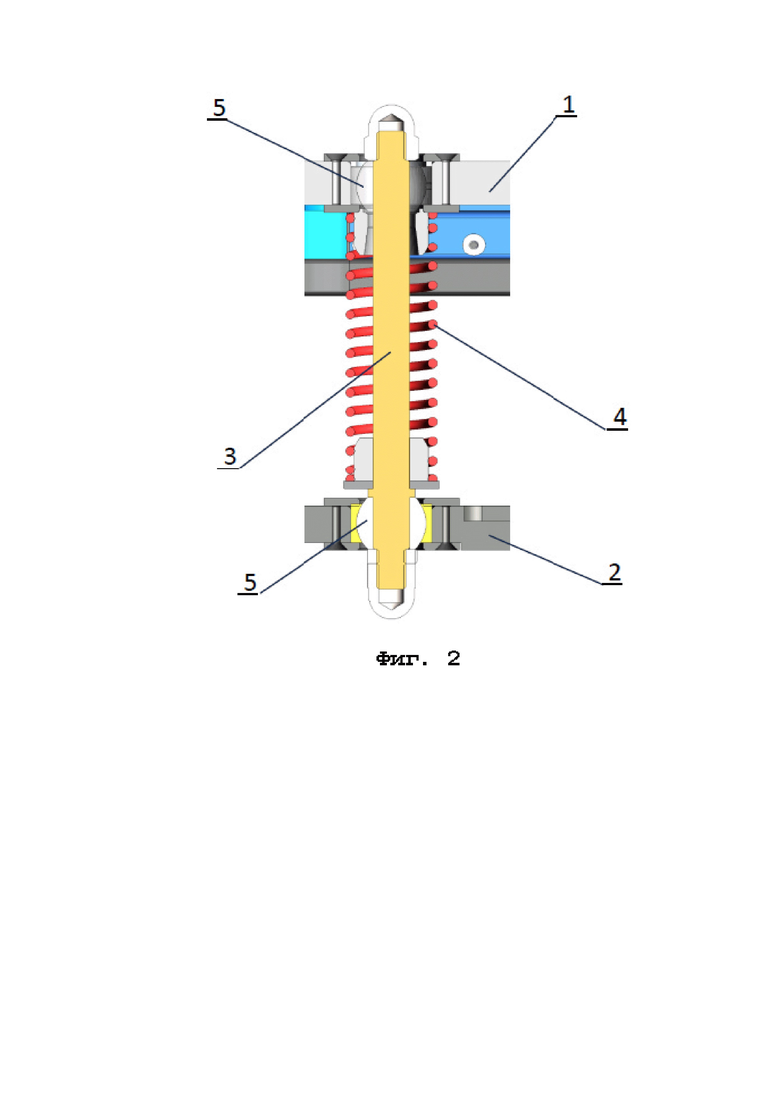
На фиг. 2 схематически изображен разрез шарнирных направляющих 3, соединяющих прижимное устройство с тестером.
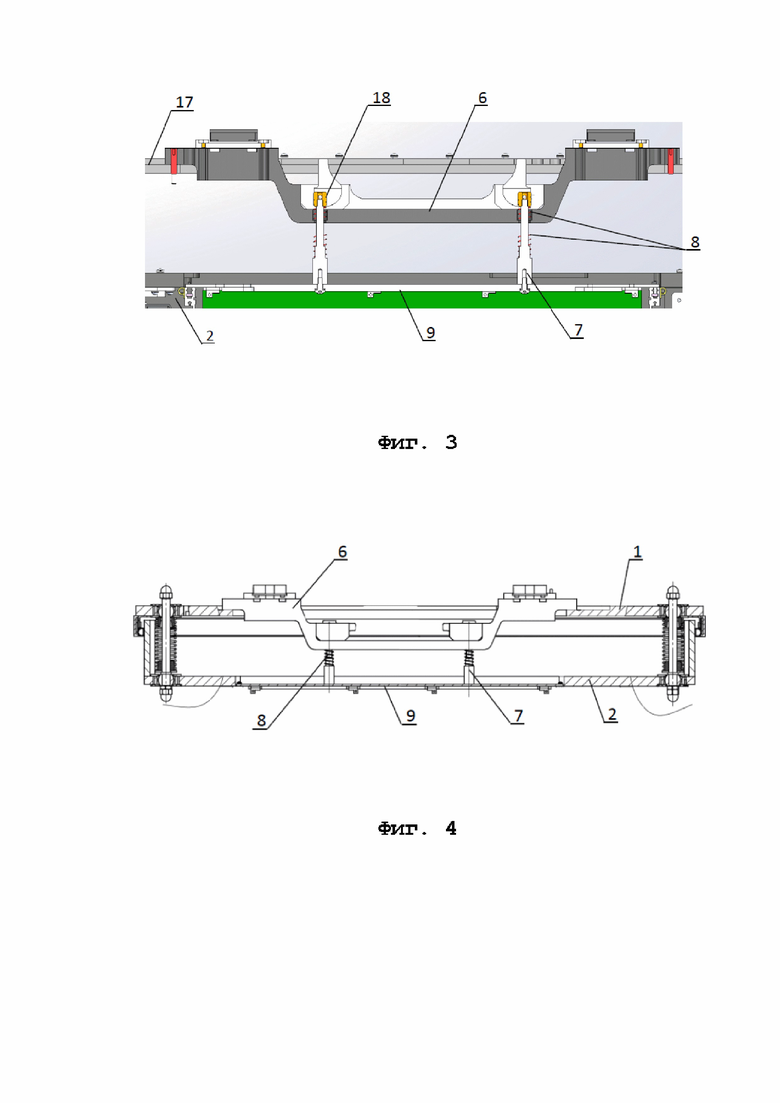
На фиг. 3 изображен разрез системы механического подключения фронтальной плоскостью, проходящей через направляющие 7. Как видно на фиг. 3 направляющие 7 жестко закреплены на модуле 9, а модуль, в свою очередь прикручен к тестеру 2. Кронштейн кронштейн 6 может отклоняться вместе с прижимным устройством 1 относительно направляющих 7, а гайка 17 не дает кронштейну соскочить с направляющих 7.
На фиг. 4 схематично показан разрез аналогичный разрезу с фиг. 3 фронтальной плоскостью на некотором расстоянии от направляющих 7.
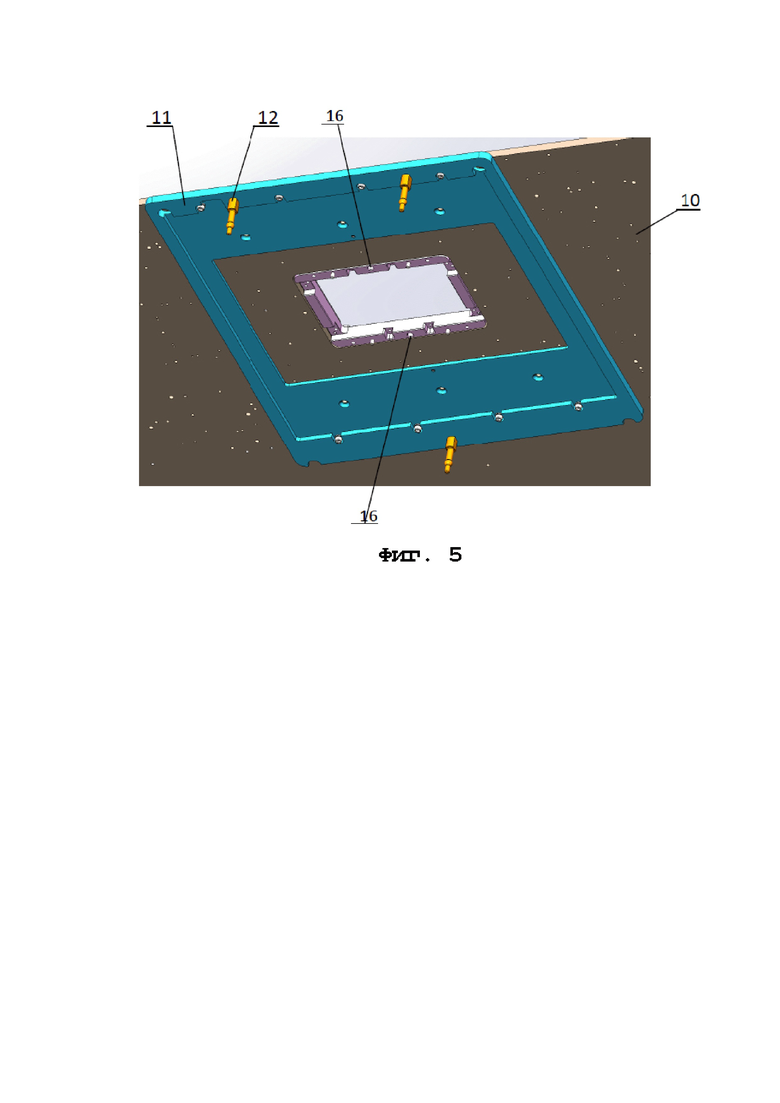
На фиг. 5 показана стыковочная плита хендлера с предварительными ловителями 12 (вид снизу). Окно по центру -представляет собой зону, куда при механическом подключении входит оснастка для установки проверяемого устройства (DUT), закрепленная на прижимном устройстве 1 (см. фиг. 6).
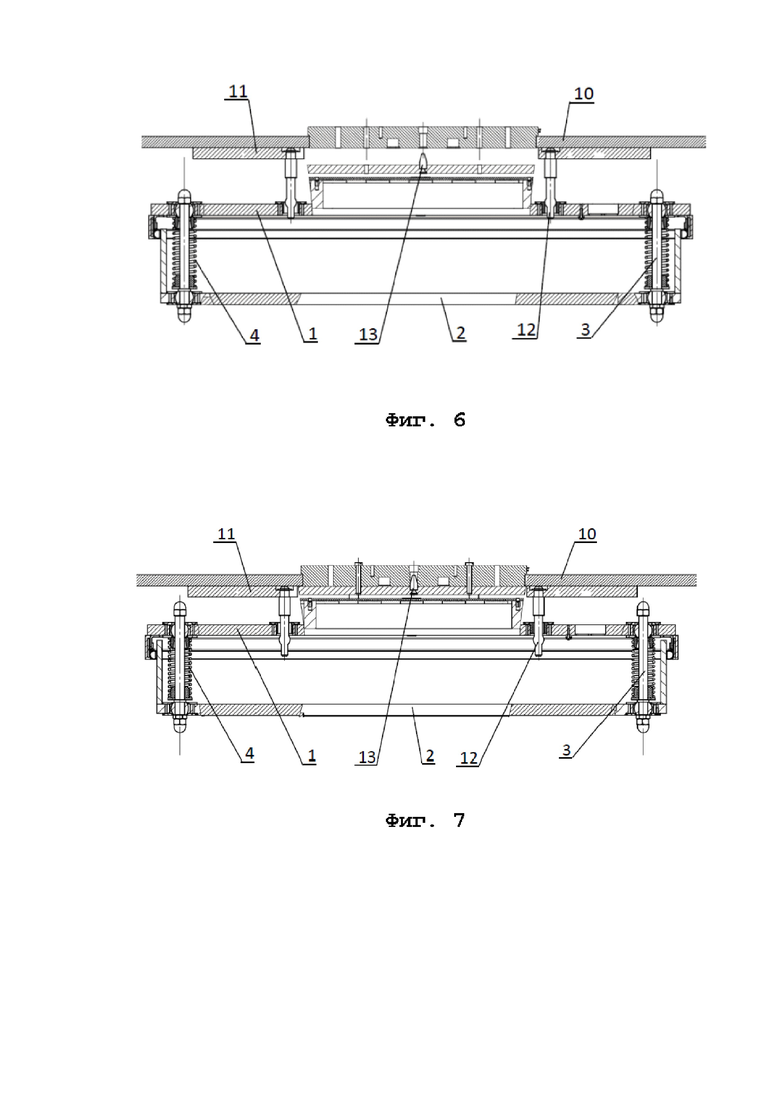
На фиг. 6 и 7 схематично показаны разрезы, иллюстрирующие фазы механического подключения хендлера 10 с тестером 2. На первой фазе (фиг. 5) предварительные ловители попадают в ответные отверстия прижимного устройства 1 и по мере перемещения точные ловители располагаются все ближе к ответным отверстиям хендлера 10. На фиг. 6 показана вторая фаза, в которой точные ловители 13 полностью углублены в отверстия хендлера 10. Деталь с отверстиями для точных ловителей 13 представляет собой прямоугольную рамку, которая крепится в хендлеру 10 производителем хендлеров - см. фиг. 5.
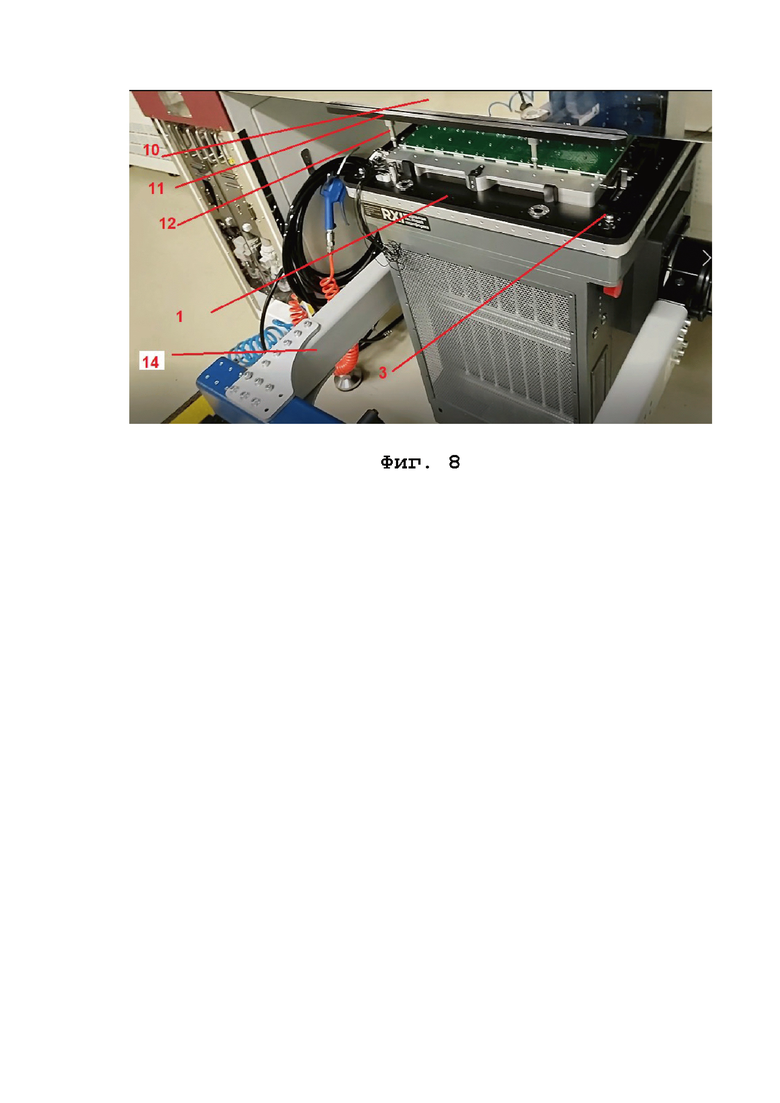
На фиг. 8 показана фотография установки, в которой тестер с помощью манипулятора 14 располагают под хендлером 10, а предварительные ловители 12 располагаются примерно на одной оси с ответными отверстиями в прижимном устройстве.
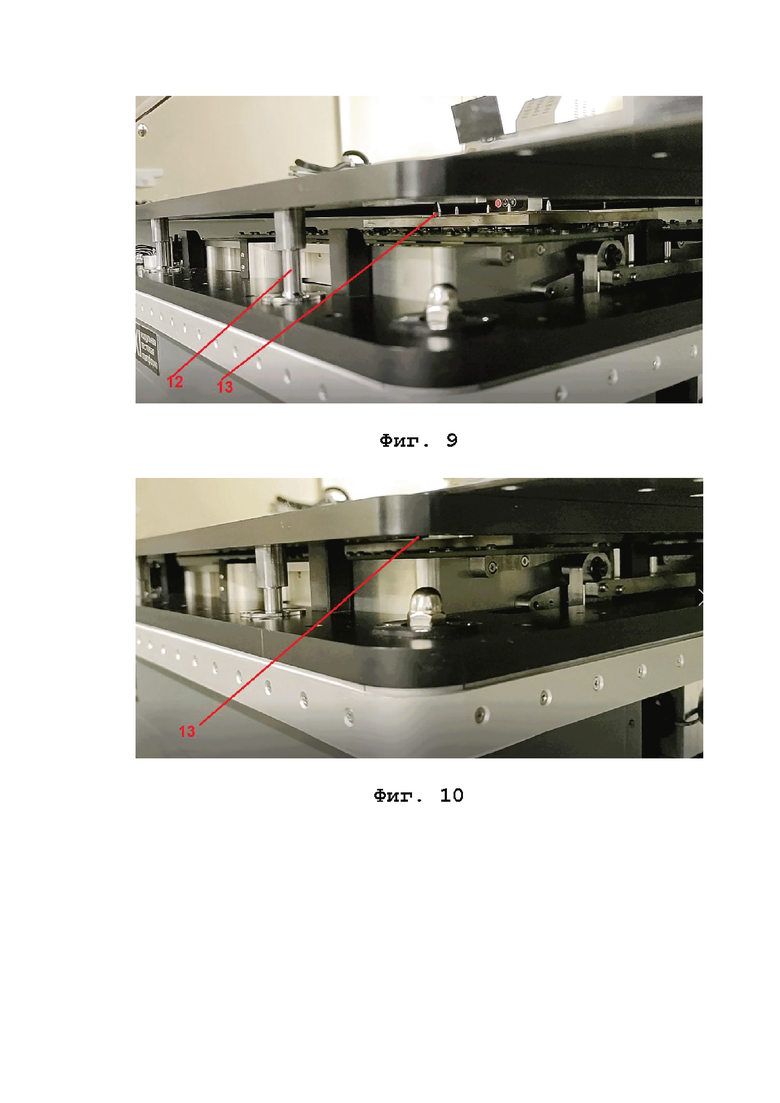
На фиг. 9 показана фотография, на которой видно, как расширенные части на концах предварительных ловителей 12 зашли в отверстия в прижимном устройстве, при этом концы точных ловителей 13 располагаются на некотором расстоянии от ответных отверстий примерно на одной оси с ними.
На фиг. 10 показана фотография, на которой видно, что расширенные части предварительных ловителей 12 погрузились глубоко внутрь ответных отверстий в прижимном устройстве таким образом, что на уровне отверстий располагаются их тонкие шейки с диаметром меньше диаметра этих отверстий, при этом сужающиеся кончики точных ловителей 13 полностью погрузились в ответные отверстия.
На фиг. 1-10 использованы следующие обозначения:
1 - прижимное устройство,
2 - тестер,
3 - направляющие,
4 - пружины направляющих 3,
5 - шарнирные узлы крепления,
6 - кронштейны для измерительных модулей (фиг. 1),
7 - направляющие измерительных модулей
8 - пружины направляющих 7,
9 - измерительный модуль,
10 - хендлер,
11 - стыковочная плита хендлера 10,
12 - предварительные ловители,
13 - точные ловители,
14 - манипулятор,
15 - отверстия для предварительных ловителей (12),
16 - отверстия для точных ловителей (13) на хендлере,
17 - плита прижимного устройства,
18 - фиксирующие гайки направляющих 7.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Как изображено на фиг. 1-5, система механического подключения 2 и хендлера 10 содержит:
стыковочную плиту 11, установленную на хендлер 10, и снабженную предварительными ловителями 12,
прижимное устройство 1, установленное на тестер 2, включающее:
(i) плиту прижимного устройства 17 с жестко установленным на нем кронштейном 6 для измерительных модулей, подпружиненное относительно тестера 2 и снабженное отверстиями для предварительных ловителей 12,
(ii) направляющие 3 для основания и
(iii) направляющие 7 для кронштейна 6,
(iv) точные ловители 13.
Направляющие 3 для основания расположены таким образом, что их продольные оси в отсутствие внешних воздействий располагается, по существу, под прямым углом к основанию, при этом они посредством шарниров 5 (направляющие 3) одним своим концом соединены с основанием, а другим - с тестером 2 таким образом, что шарниры 5 обеспечивают возможность отклонения продольной оси направляющих 3 от прямого угла с плоскостью основания и выполнены (направляющие 3) с возможностью поступательного перемещения основания относительно их продольной оси между крайними положениями (с наибольшим и наименьшим расстоянием между основанием и тестером 2).
Направляющие 7 для кронштейна 6 одним своим концом нежестко с гарантированным зазором соединены с кронштейном 6, а другим концом - жестко с измерительным модулем 9 с возможностью отклонения центрирующих отверстий кронштейна 6 относительно продольной оси направляющих 7 и возможностью поступательного перемещения кронштейна 6 относительно их продольной оси между крайними положениями (с наибольшим и наименьшим расстоянием между кронштейном 6 и измерительным модулем 9).
Предварительные ловители 12 выполнены в виде штырей, установленных по существу под прямым углом к стыковочной плите 11 и имеющих проксимальный конец с диаметром окружности, описанной вокруг поперечного сечения d1, дистальный конец с диаметром окружности, описанной вокруг поперечного сечения d2 и расширение на дистальном конце с диаметром окружности, описанной вокруг поперечного сечения в наиболее широкой части D большим, чем d1 и d2.
Упомянутые отверстия для предварительных ловителей 12, имеют диаметр вписанной окружности D.
Точные ловители 13 имеют проксимальную часть цилиндрической формы и сужающуюся дистальную часть, при этом они расположены таким образом, что при совмещении наиболее широкой части упомянутых расширений предварительных ловителей 12 с соответствующими отверстиями в основании блокируются перемещения основания в радиальных направлениях относительно курса тестера 2, тогда как просветы сечений соответствующих отверстий в хендлере 10 совмещаются с осями точных ловителей 13.
Расширения предварительных ловителей 12 расположены таким образом, чтобы в положении, когда дистальная часть точных ловителей располагается рядом с просветами соответствующих отверстий в хендлере 10, наиболее широкая часть предварительных ловителей 12 диаметром D располагалась вне соответствующих отверстий в основании, тем самым обеспечивая возможность смещения основания в радиальных направлениях относительно курса тестера 2.
Прижимное устройство 1 с оснасткой для установки проверяемого устройства (DUT) крепится к тестеру 2 по четырем углам подпружиненными опорами (см. фиг. 1), представляющих собой направляющие 3 с пружинами 4 и шарнирными узлами крепления 5 (см. фиг. 2).
В тестер установлены измерительные модули, а кронштейны 6 измерительных модулей крепятся на прижимном устройстве 1.
Кронштейн измерительного модуля, на котором установлены блоки контактов с проводами, кабелями или шлейфами, подключенные к измерительным модулям, жестко крепится к прижимному устройству 1 с помощью стандартизированного крепежа (винты). В то же время к измерительному модулю 9 кронштейн 6 крепится с помощью направляющих 7 с пружинами 8 (см. фиг. 3 и 4).
Измерительные модули 9 крепятся к тестеру 2 стандартизированным резьбовым крепежом, при этом кронштейны измерительных модулей 6 с установленными блоками контактов, с проводами, кабелями или шлейфами, подключенными к измерительным модулям 9, жестко крепятся к демпфирующей плите прижимного устройства 1 стандартизированным резьбовым крепежом, а с измерительным модулем кронштейны связаны нежестко с помощью направляющих 7 с пружинами 8, что позволяет менять угол наклона и осуществлять ограниченной линейное перемещение по трем плоскостям (X, Y, Z).
Для извлечения измерительных модулей 9, необходимо извлечь оснастку для установки проверяемого устройства (DUT), отсоединить кронштейн 6 от демпфирующей плиты прижимного устройства 1 - открутить резьбовой крепеж, далее отсоединить измерительный модуль 9 от тестера - открутить резьбовой крепеж и вытащить вверх измерительный модуль сквозь демпфирующую плиту прижимного устройства 1, потянув за кронштейн б. Таким образом реализована оперативная замена измерительных модулей.
Таким образом, прижимное устройство 1 крепится к тестеру 2 подпружиненными шарнирными опорами (согласно фиг. 2 и 4). При этом кронштейн 6 измерительного модуля жестко крепится к прижимному устройству 1 и нежестко крепится демпфирующими опорами к измерительному модулю (согласно фиг. 3), что обеспечивает «плавающее» демпфирующее соединение прижимного устройства с тестером.
При подключении к хендлеру 10 с помощью манипулятора 14 или другого удерживающего устройства подводят тестер 2 к стыковочной зоне хендлера 10 снизу, где на хендлер 10 установлены стыковочная плита 11 с предварительными ловителями 12 (см. фиг. 5).
Прижимное устройство 1 с проверяемым устройством (DUT) ориентируется относительно хендлера 10 по предварительным ловителям 12, предназначенным для предварительного позиционирования точных ловителей 13 (см. фиг. 5).
Далее тестер 2 прижимают к хендлеру 10. При этом пружины 4 сжимаются, а прижимное устройство 1 скользит вдоль направляющих 3 и, за счет поворота шарнирных узлов крепления 5, меняет угол наклона к горизонту в двух плоскостях, а также осуществляет ограниченное линейное перемещение по трем плоскостям (X, Y, Z) для того чтобы точные ловители 13 могли войти в ответные отверстия в хендлера 10 без перекоса и заклиниваний (см. фиг. 6 и 7). При этом, когда оси точных ловителей 13 и их ответных отверстий совмещаются, расширенные части на концах предварительных ловителей 12 выходят из соответствующих им отверстий и более не ограничивают свободу перемещения прижимного устройства 1.
Направляющие 7 используются для механической связи кронштейна 6 с измерительным модулем 9 при извлечении модуля из тестера.
Направляющие 7 вставляются в центрирующие отверстия кронштейна 6 (с гарантированным зазором) с пружинами 8 и фиксируются стандартизированными гайками 18, не позволяющими направляющим выйти из отверстий кронштейна 6.
Вместе с прижимным устройством, за счет скольжения вдоль направляющих 7 и сжатия пружин 8, меняет свое положение и угол наклона в двух плоскостях, а также осуществляет линейное перемещение по трем плоскостям (X, Y, Z) кронштейн измерительного модуля 6 относительно тестера 2 с установленными измерительными модулями 9 (см. фиг. 4).
Таким образом подпружиненное прижимное устройство 1, демпфирующие кронштейны измерительных модулей 6, а также стыковочная плита 11 с предварительными ловителями 12, обеспечивают «плавающее» соединение прижимного устройства с тестером 2, что позволяет облегчить механическое подключение тестера 2 с хендлером 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкий автоматизированный участок | 1986 |
|
SU1437192A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2010 |
|
RU2498321C2 |
| Пильно-обрабатывающее устройство для обработки пластикового профиля | 2019 |
|
RU2710702C1 |
| Стенд для испытаний промышленного робота | 1985 |
|
SU1286403A1 |
| СПОСОБ ГОРЯЧЕЙ ОБРАБОТКИ ИЗДЕЛИЙ ДАВЛЕНИЕМ ГАЗА И АГРЕГАТНАЯ ЛИНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1985 |
|
RU1345449C |
| ИНТУИТИВНАЯ МАССАЖНАЯ СИСТЕМА МАНИПУЛЯТОРНОГО ТИПА (ВАРИАНТЫ) | 2022 |
|
RU2785828C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ КОНСТРУКЦИЙ НА ПРОЧНОСТЬ И СПОСОБ ЕГО СБОРКИ И НАСТРОЙКИ | 2003 |
|
RU2249803C1 |
| СПАСАТЕЛЬНО-ТРАНСПОРТНЫЙ ПОДВОДНЫЙ АППАРАТ С УСТРОЙСТВАМИ КРЕПЛЕНИЯ К КОМИНГС-ПЛОЩАДКЕ ПОДВОДНОГО ОБЪЕКТА | 2012 |
|
RU2526365C2 |
| СТЕНД ДЛЯ СБОРКИ И СВАРКИ РАМЫ ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2017 |
|
RU2680114C1 |
| УСТРОЙСТВО ДЛЯ ПОДГОТОВКИ И ПОДАЧИ ПРОБ МОЛОКА | 2024 |
|
RU2825123C1 |
Настоящее изобретение относится к системе механического подключения, которая применяется для совмещения и подключения контрольно-измерительного оборудования и автоматического раскладчика микросхем. Система механического подключения в виде прижимного устройства с оснасткой для установки проверяемого устройства (DUT) устанавливается на тестер на подпружиненных шарнирных опорах, представляющих собой направляющие с пружинами и шарнирные поворотные узлы крепления, посредством которых прижимное устройство (с оснасткой DUT) скользит вдоль направляющих и меняет угол наклона к горизонту в двух плоскостях, а также осуществляет ограниченное линейное перемещение по трем плоскостям (X, Y, Z). Кронштейны измерительных модулей, с установленными блоками контактов, с проводами, кабелями или шлейфами, подключенными к измерительным модулям, жестко крепятся к демпфирующей плите прижимного устройства, а к измерительному модулю крепятся с помощью направляющих с пружинами, посредством которых кронштейн, вместе с демпфирующей плитой прижимного устройства, скользит вдоль направляющих измерительного модуля и меняет угол наклона к измерительному модулю в двух плоскостях, а также осуществляет ограниченное линейное перемещение по трем плоскостям (X, Y, Z). Технический результат, обеспечиваемый при использовании изобретения, состоит в том, что уменьшаются трудозатраты оператора, необходимые для подключения тестера и хендлера, уменьшается время стыковки. 2 з.п. ф-лы, 10 ил. 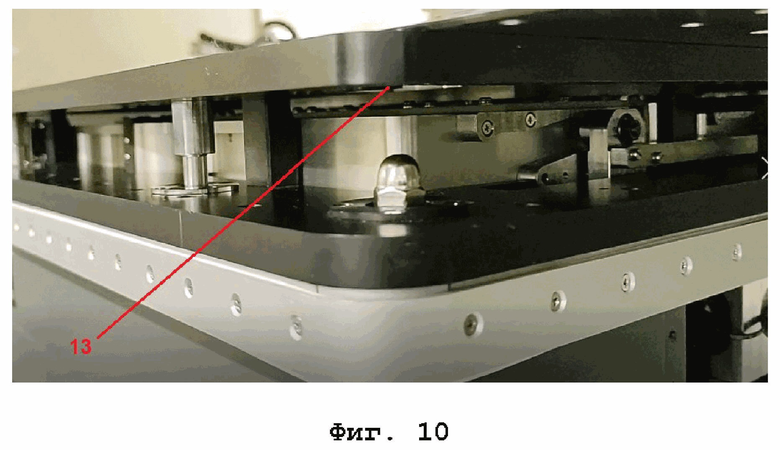
1. Система механического подключения тестера (2) и хендлера (10), включающая: стыковочную плиту (11), установленную на хендлер (10) и снабженную предварительными ловителями (12), прижимное устройство (1), установленное на тестер (2), включающее: плиту прижимного устройства (17) с жестко установленным на нем кронштейном (6) для измерительных модулей, подпружиненное относительно тестера (2) и снабженное отверстиями для предварительных ловителей (12), направляющие (3) для основания и направляющие (7) для кронштейна (6), точные ловители (13), характеризующаяся тем, что направляющие (3) для основания расположены таким образом, что их продольные оси в отсутствие внешних воздействий располагаются, по существу, под прямым углом к основанию, при этом они посредством шарниров (5) одним своим концом соединены с основанием, а другим - с тестером (2) таким образом, что шарниры (5) обеспечивают возможность отклонения продольной оси направляющих (3) от прямого угла с плоскостью основания и выполнены с возможностью поступательного перемещения основания относительно их продольной оси между крайними положениями, направляющие (7) для кронштейна (6) одним своим концом нежестко с гарантированным зазором соединены с кронштейном (6), а другим концом – жестко с измерительным модулем (9) с возможностью отклонения центрирующих отверстий кронштейна (6) относительно продольной оси направляющих (7) и возможностью поступательного перемещения кронштейна (6) относительно их продольной оси между крайними положениями, предварительные ловители (12) выполнены в виде штырей, установленных по существу под прямым углом к стыковочной плите (11) и имеющих проксимальный конец с диаметром окружности, описанной вокруг поперечного сечения d1, дистальный конец c диаметром окружности, описанной вокруг поперечного сечения d2, и расширение на дистальном конце c диаметром окружности, описанной вокруг поперечного сечения, в наиболее широкой части D, большим, чем d1 и d2, упомянутые отверстия для предварительных ловителей (12) имеют диаметр вписанной окружности D, точные ловители (13) имеют проксимальную часть цилиндрической формы и сужающуюся дистальную часть, при этом они расположены таким образом, что при совмещении наиболее широкой части упомянутых расширений предварительных ловителей (12) с соответствующими отверстиями в основании блокируются перемещения основания в радиальных направлениях относительно курса тестера (2), тогда как просветы сечений соответствующих отверстий в хендлере (10) совмещаются с осями точных ловителей (13); расширения предварительных ловителей (12) расположены таким образом, чтобы в положении, когда дистальная часть точных ловителей располагается рядом с просветами соответствующих отверстий в хендлере (10), наиболее широкая часть предварительных ловителей (12) диаметром D располагалась вне соответствующих отверстий в основании, тем самым обеспечивая возможность смещения основания в радиальных направлениях относительно курса тестера (2).
2. Устройство по п.1, характеризующееся тем, что в нем основание подпружинено относительно тестера (2) посредством спиральновитых пружин (4), расположенных на оси направляющих (3).
3. Устройство по п.1, характеризующееся тем, что в нем основание подпружинено относительно тестера (2) посредством спиральновитых пружин (8), расположенных на оси направляющих (7).
| US 6377062 B1, 23.04.2002 | |||
| US 7221175 B2, 22.05.2007 | |||
| US 11821913 B2, 21.11.2023 | |||
| US 11841392 B2, 12.12.2023 | |||
| KR 102102830 B1, 23.04.2020 | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ИНТЕГРАЛЬНЫХ СХЕМ | 1971 |
|
SU419903A1 |
| Устройство для контроля интегральных схем | 1983 |
|
SU1171795A1 |

