Предлагаемое изобретение относится к усовершенствованию конструкции гиростабилизаторов, применяемых для управления космическими летательными аппаратами.
Получаемые габаритно-массовые характеристики гиростабилизаторов определяются основным его элементом - двигателем-маховиком.
Поэтому создание двигателей-маховиков с оптимальными габаритно-массовыми характеристиками позволяют получить улучшенные габаритно-массовые характеристики как непосредственно самого стабилизатора, так и системы управления космического летательного аппарата в целом.
В настоящее время известны гиростабилизаторы с двумя маховиками (см. 1. Гладышев Г.Н., Дмитриев B.C., Лявзбург В.П. Силовой гироскопический стабилизатор. Авт. св. №1839898.
2. Paul Müller. Rainer S.Singliger, George M.Siouris. Концепции создания маховиков для 3-х осной ориентации ИСЗ; технические эксперименты и исследования. Реферативный журнал. Исследование космического пространства №2 1976.)
Существующие конструкции гиростабилизаторов содержат двигатели-маховики, выполненные в виде двух автономных, имеющих собственные корпуса и гермокамеры узлов, которые расположены по разные стороны от осей вращения рамок карданного подвеса.
Такая конструкторская компановка определяет габариты гиростабилизатора и накладывает ограничение на угловые перемещения рамок карданного подвеса.
Целью предлагаемого изобретения является устранение изложенных недостатков.
Эта цель достигается сочетанием положительных качеств одномаховичных гиростабилизаторов в том, что у них возможно получение неограниченных поворотов рамок карданного подвеса и положительных качеств двухмаховичных гиростабилизаторов в части отсутствия ограничения скорости вращения стабилизирующего двигателя-маховика путем создания конструкции моноблочного двухмаховичного двигателя.
Сущность предлагаемого изобретения поясняется чертежами, где:
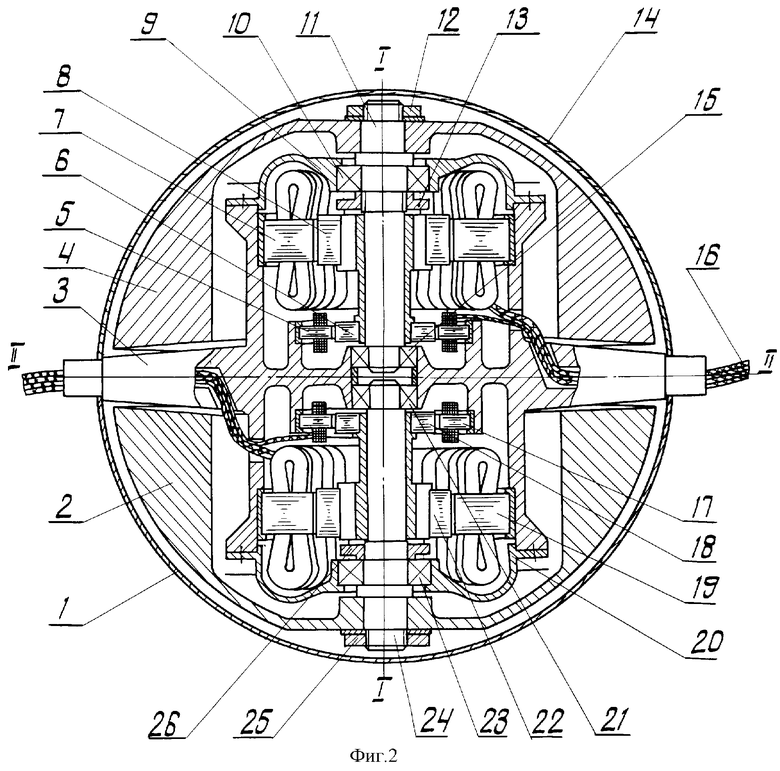
на фиг.1 показана общая компановка гиростабилизатора, содержащего закрытый герметичным сферическим кожухом двухмаховичный двигатель, размещенный в корпусе, выполняющем одновременно роль внутренней рамки. Этот двигатель установлен в наружную рамку карданного подвеса. Кроме этого, гиростабидизатор содержит электроэлементы (датчики угла, датчики момента);
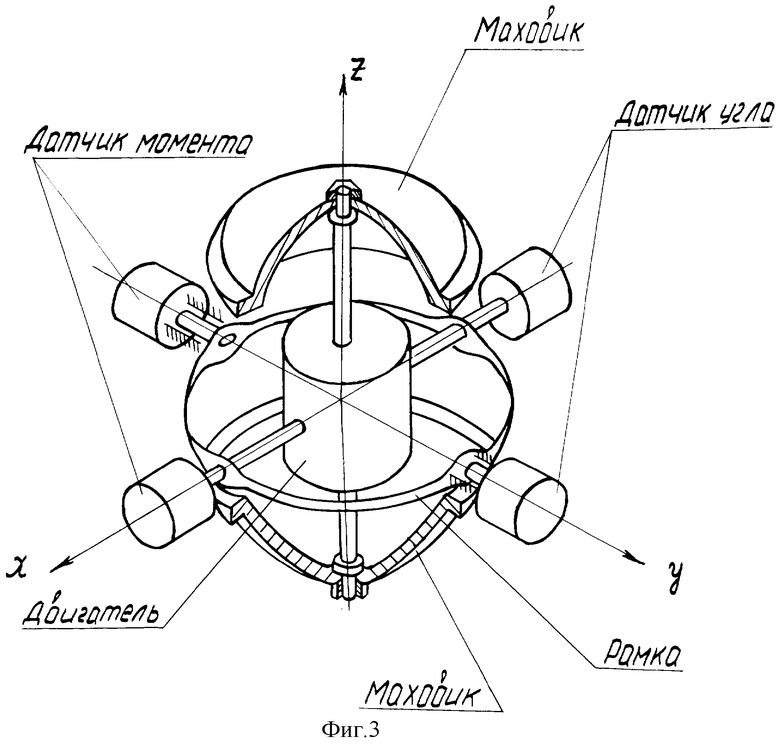
на фиг.2 показан один из вариантов конструкции двухмаховичного двигателя-маховика гиростабилизатора;
на фиг.3 приведена кинематическая схема гиростабилизатора (сферический герметичный кожух условно не показан).
Двигатель-маховик (фиг.2) состоит из закрываемого герметичными кожухами 1 и 14 корпуса 3, в котором размещаются электродвигатели, на валах 11 и 24 которых крепятся маховики 2 и 4.
Электродвигатели содержат статоры 7 и 19 и запрессованные на валах 11 и 24 пакеты роторов 8 и 22. Элементы обеих электродвигателей (статоры 7, 19, валы 11, 27 и т.д.) заключены в единый корпус 3. Валы 11 и 24 электродвигателей, на которых посажены маховики 2 и 4, устанавливаются через шарикоподшипниковые опоры 10 и 15 (21 и 23) в корпус 3. Щитом 9 (20) подгоняется требуемая величина люфта шарикодшипниковых опор 10, 15 (21, 23).
Электродвигатели содержат также тахогенераторы, у которых пакеты роторов 6 и 18 запрессованы на валы 11 и 24, а пакеты статоров 5 и 17 запрессованы в корпус 3. Выводные концы 16 электродвигателей и тахогенераторов выведены через ось корпуса 3.
Как видно из чертежа (фиг.2), все элементы электродвигателей (пакеты, ротора, валы и т.п.) и маховики 2 и 4 симметрично расположены по обе стороны оси П-П, которая является так же осью вращения внутренней рамки карданного подвеса (ось Х фиг.3). На фиг.2 показаны также элементы крепления подшипниковых опор (гайки 12, 13, 25, 26). Маховики 11 и 24 генерируют кинетические моменты Н1 и Н2 (причем Н1 Н2).
По функциональному назначению двигатель с маховиком, генерирующим постоянный кинетический момент Н1 является силовым гиромаховиком и служит для создания гироскопических моментов для управления космическим летательным аппаратом относительно 2-х осей (например, рыскания и крена).
Другой двигатель-маховик с кинетическим моментом H2 является управляющим двигателем-маховиком. Он развивает большой электродинамический момент и служит для управления космическим летательным аппаратом относительно третьей оси (тангажа).
Для устранения аэродинамического сопротивления двигатель-маховик изготавливается в вакуумном исполнении путем сваривания полусферических кожухов 1 и 14.
По мнению авторов, в предлагаемом гиростабилизаторе оригинальным является:
1. Совмещение 2-х маховиков с различным функциональным назначением в одной моноблочной конструкции двигателя-маховика, т.е. улучшение габаритно-массовых характеристик всего гиростабилизатора.
2. Возможность получения неограниченных углов поворота векторов кинетических моментов Н1 и Н2, т.е. расширение области вариации векторов кинетического момента.
3. Улучшение технологичности статической балансировки подвижной части гиростабилизатора за счет симметричности конструкции двигателя-маховика.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН КОСМИЧЕСКОГО АППАРАТА | 1979 |
|
SU1839918A1 |
| ГИРОСТАБИЛИЗАТОР | 1975 |
|
SU1839898A1 |
| Система гиростабилизации кабины пилотируемого летательного аппарата (ЛА) | 2019 |
|
RU2728221C1 |
| СИЛОВОЙ ТРЕХСТЕПЕННЫЙ ГИРОСКОП | 1985 |
|
SU1839930A1 |
| СИЛОВОЙ ДВУХСТЕПЕННЫЙ УПРАВЛЯЮЩИЙ ГИРОСКОП | 1984 |
|
SU1839931A1 |
| Способ идентификации тензора присоединенных моментов инерции тела и устройство для его осуществления | 2018 |
|
RU2688964C1 |
| МНОГОРОТОРНОЕ ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ПОЛОЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2009 |
|
RU2403190C1 |
| ДВУХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1984 |
|
SU1839933A1 |
| Способ разгрузки инерциальных исполнительных органов космического аппарата и устройство для реализации способа | 2024 |
|
RU2834705C1 |
| ГИРОСКОП | 2010 |
|
RU2446382C1 |
Изобретение относится к усовершенствованию конструкции гиростабилизаторов, применяемых для управления космическими летательными аппаратами. Сущность: гиростабилизатор содержит датчики угла, датчики момента, и два двигателя-маховика, установленные в карданном подвесе с внутренней и внешней рамками. При этом двигатели-маховики расположены по разные стороны от осей внутренней и внешней рамок карданного подвеса и установлены соосно в едином сферическом герметичном корпусе, расположенном на внутренней рамке карданного подвеса. Технический результат: уменьшение габаритных размеров и массы, повышение точности и упрощение. 3 ил.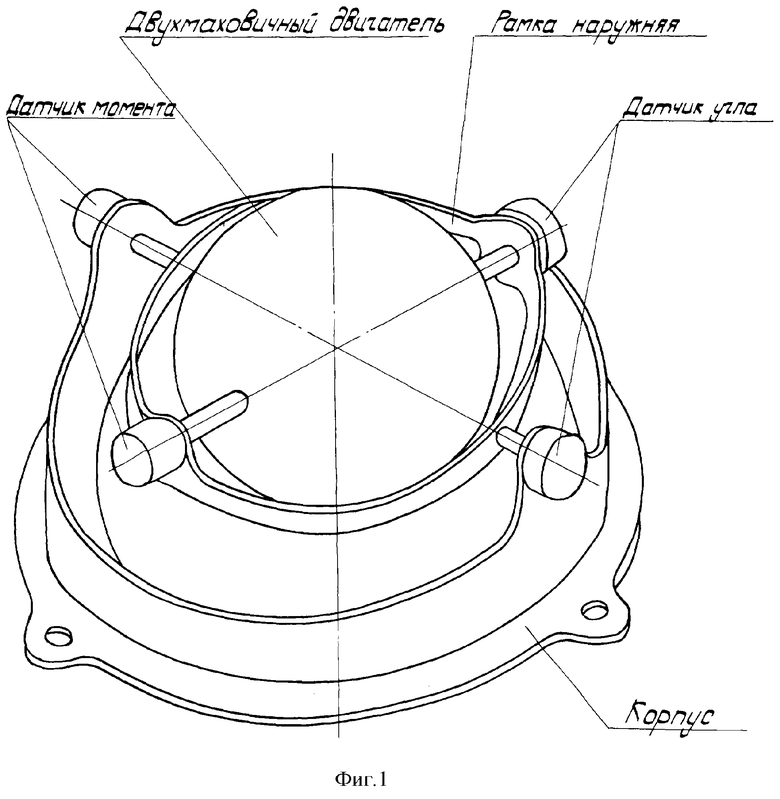
Гиростабилизатор, содержащий установленные в карданном подвесе с внутренней и внешней рамками два двигателя-маховика, расположенные по разные стороны от осей внутренней и внешней рамок карданного подвеса, датчики угла и датчики момента, отличающийся тем, что, с целью уменьшения габаритных размеров и массы, повышения точности и упрощения, в нем двигатели-маховики установлены соосно в едином сферическом герметичном корпусе, расположенном на внутренней рамке карданного подвеса.
| Авт.св | |||
| ГИРОСТАБИЛИЗАТОР | 1975 |
|
SU1839898A1 |

