Изобретение относится к области измерительной техники, а именно, к гироскопическим преобразователям инерциальной информации.
Известны гироскопы [1] , содержащие гиромотор, ротор, кардан, датчики угла и момента.
Наиболее близким по технической сущности является гироскоп, содержащий гиромотор, ротор с внутренним карданом, преобразователи угла и магнитоэлектрические преобразователи момента по первой и второй измерительным осям, причем бескаркасные компенсационные катушки преобразователей момента одной стороны закреплены по окружности на перпендикулярной оси вращения ротора торцевой плоскости оправки, установленной в корпусе гироскопа [2].
Недостатком такого гироскопа является погрешность измерения вследствие поперечных связей измерительных осей, вызванная неточностью выполнения расположения компенсационных катушек преобразователей момента по окружности торцевой плоскости оправки.
Техническим результатом изобретения является повышение точности гироскопа.
Данный технический результат достигается в гироскопе, содержащем гиромотор, ротор с внутренним карданом, преобразователи угла и магнитоэлектрические преобразователи момента по первой и второй измерительным осям, причем бескаркасные компенсационные катушки преобразователей момента с одной стороны закреплены по окружности на перпендикулярной оси вращения ротора торцевой плоскости оправки, установленной в корпусе гироскопа, тем, что каждая компенсационная катушка закреплена дополнительно еще с двух сторон в образованных на торцевой плоскости оправки выступах, охватывающих всю часть одной половины компенсационной катушки, в которой витки направлены параллельно торцевой плоскости оправки, выступы направлены в сторону второй половины компенсационной катушки с направлением витков параллельно торцевой плоскости оправки, выступы выполнены с конфигурацией, повторяющей конфигурацию охватываемой выступами части компенсационной катушки.
В частном случае в гироскопе размер выступов по торцевой плоскости оправки в направлении оси вращения ротора выполнен равным толщине компенсационной катушки, и по этому размеру выступы совмещены с компенсационными катушками.
Посредством установки в образованные на торцевой плоскости оправки выступы компенсационных катушек, охватываемых дополнительно с двух сторон данными выступами, повторяющими конфигурацию компенсационных катушек, обеспечивается более точное расположение компенсационных катушек по окружности на торцевой плоскости оправки, чем достигается более точная ориентация компенсационных катушек относительно измерительных осей гироскопа. В результате повышается точность измерений гироскопа за счет устранения поперечных связей между измерительными осями гироскопа ввиду уменьшения погрешности выполнения расположения измерительных осей гироскопа.
На фиг. 1 представлен общий вид гироскопа; на фиг.2 - разрез гироскопа; на фиг.3 - обойма в развернутом виде; на фиг.4 - вид компенсационной катушки; на фиг. 5 - обойма с компенсационными катушками в развернутом виде; на фиг.6 - разрез обоймы с компенсационными катушками.
В гироскопе (фиг. 1) в корпусе 1 с крышкой 2 и кожухом 3 установлен статор 4 гиромотора, ротор 5 которого установлен на валу 6 с подшипниками 7I, 7II, чем обеспечивается угловое движение ротора 5 гиромотора относительно оси вращения 8-8.
На валу 6 установлены рамка подвеса 9 и ротор 10, на котором закреплены намагниченные в радиальном направлении кольцевые постоянные магниты 11I, 11II.
В корпусе 1 на торцевой плоскости 12 оправки 13 установлены бескаркасные компенсационные катушки 14I, 14II первого преобразователя момента, а также П-образные магнитные системы 15I, 15II первого преобразователя угла, имеющие соответственно сердечники 16I, 16II и обмотки 17I, 17II.
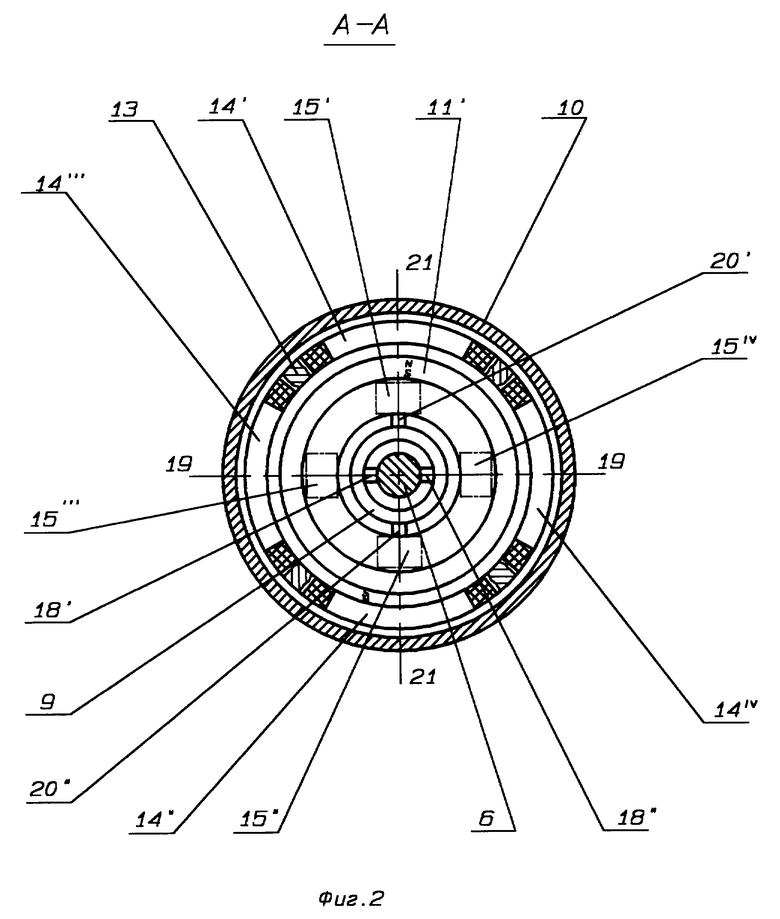
На фиг. 2, где условно штрих-пунктиром показано расположение магнитных систем 15I, 15II первого преобразователя угла и магнитных систем 15III, 15VI второго преобразователя угла относительно компенсационных катушек 14I, 14II первого преобразователя момента и компенсационных катушек 14III, 14IV второго преобразователя момента, с валом 6 рамка подвеса 9 соединена торсионами 18I, 18II. При указанном положении магнитных систем 15I, 15II первого преобразователя угла и компенсационных катушек 14III, 14IV второго преобразователя момента образована первая измерительная ось 19-19 гироскопа.
Рамка подвеса 9 соединена с ротором 10 торсионами 20I, 20II. При указанном положении магнитных систем 15II, 15IV второго преобразователя угла и компенсационных катушек 14I, 14II первого преобразователя момента образована вторая измерительная ось 21-21 гироскопа.
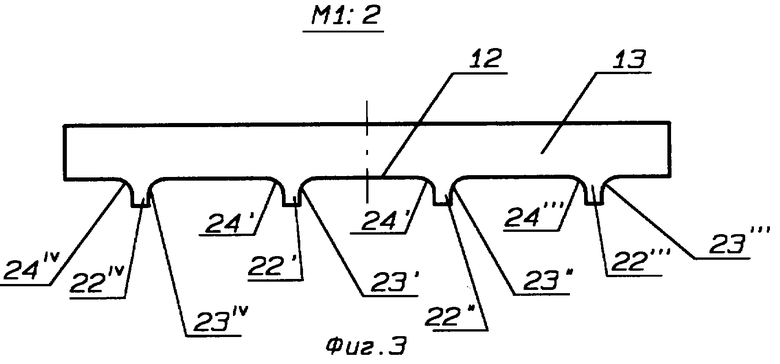
На торцевой плоскости 12 обоймы 13 (фиг.3) расположены выступы 22I, 22II, 22III, 22IV, имеющие с одной стороны соответственно криволинейные поверхности 23I, 23II, 23III, 23IV, а с другой стороны - криволинейные поверхности 24I, 24II, 24III, 24IV.
В компенсационной катушке 14I (фиг.4) с осью симметрии 25-25 витки, расположенные в одной ее половине между внешней поверхностью 26 и внутренней поверхностью 27, направлены параллельно торцевой плоскости 12 оправки 13. Также направлены параллельно торцевой плоскости 12 оправки 13 витки, расположенные между внешней поверхностью 28 и внутренней поверхностью 29 компенсационной катушки 14I. Боковые поверхности 30, 31 компенсационной катушки 14I имеют криволинейную поверхность. Аналогичным образом выполнены компенсационные катушки 14II, 14III, 14IV.
Конфигурация поверхности 23I выступа 22I (фиг.3) повторяет конфигурацию боковой поверхности 30 компенсационной катушки 14I (фиг.4). Конфигурация поверхности 24II выступа 22II совпадает с конфигурацией боковой поверхности 31 компенсационной катушки 14I.
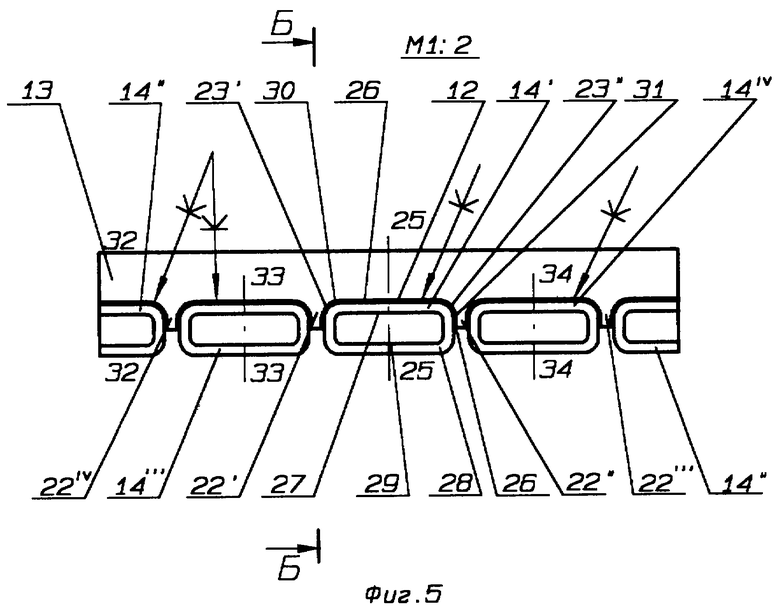
Компенсационная катушка 14I (фиг.5) установлена между выступами 22I и 22II обоймы 13 на ее торцевой плоскости 12 так, что ось симметрия 25-25 компенсационной катушки 14I направлена перпендикулярно торцевой плоскости 12, внешняя поверхность 26 совмещена с торцевой плоскостью 12 обоймы 13, боковая поверхность 30 совмещена с поверхностью 23I выступа 22I, боковая поверхность 31 совмещена с поверхностью 24II выступе 22II. При этом выступы 22I, 22II направлены в сторону второй половины компенсационной катушки 14I между внешней поверхностью 28 и внутренней поверхностью 29; выступы 22I, 22II охватывают с двух сторон всю часть первой половины компенсационной катушки 14I между внешней поверхностью 26 и внутренней поверхностью 27.
Компенсационная катушка 14II с ее осью симметрии 32-32 закреплена между выступами 22III и 22IV, компенсационная катушка 14III с ее осью сисмметрии 33-33 закреплена между выступами 22I и 22IV, а компенсационная катушка 14IV с ее осью симметрии 34-34 закреплена между выступами 22II, 22III.
Размер h выступа 22I (фиг.6) по торцевой плоскости 12 обоймы 13 по ее диаметру (в направлении к оси вращения 8-8) выполнен равным толщине компенсационной катушки 14I. При атом по размеру h выступ 22I и компенсационная катушка 14I совмещены.
Гироскоп работает следующим образом. В качестве чувствительного элемента индикаторного гиростабилизатора гироскоп посредством первого преобразователя угла с магнитными системами 15I, 15II измеряет угол отклонения гиростабилизированной платформы от положения, заданного ротором 10 гироскопа, относительно первой измерительной оси 19-19. Угол отклонения по второй измерительной оси 21-21 измеряется вторым преобразователем угла с магнитными системами 15III, 15IV.
В гироскопе как датчике угловой скорости по первой измерительной оси 19-19 первый преобразователь угла с магнитными системами 15I, 15II выдает сигнал отклонения ротора 10 от начального положения.
Сигнал с первого преобразователя угла усиливается и подается на компенсационные катушки 14III, 14IV второго преобразователя момента, создаваемым моментом которого ротор 10 возвращается в начальное положение. Ток компенсационных катушек 14III, 14IV является мерой угловой скорости по первой измерительной оси 19-19 гироскопа. Аналогичным образом при использовании второго преобразователя угла и компенсационных катушек 14I, 14II первого преобразователя момента измеряется угловая скорость по второй измерительной оси 21-21.
Расположением выступов 22I, 22II, 22III, 22IV на оправке 13 достигается то, что ось симметрии 25-25 компенсационной катушки 14I и ось симметрии 32-32 компенсационной катушки 14II располагаются точно по второй измерительной оси 21-21 гироскопа, а ось симметрии 33-33 компенсационной катушки 14III и ось симметрии 34-34 компенсационной катушки 14IV располагаются точно во первой измерительной оси 19-19 гироскопа. В результате создаваемый компенсационными катушками 14I-14II момент по второй измерительной оси 21-21 не передается на первую измерительную ось 19-19, в создаваемый компенсационными катушками 14III-14IV момент по первой -измерительной оси 19-19 не передается на вторую измерительную ось 21-21. Поэтому устраняются перекрестные связи между первой 19-19 и второй 21-21 измерительными осями гироскопа, чем достигается повышение точности гироскопа.
Источники информации
1. Гироскопические системы. Под редакцией Д.С.Пельпора. М., Высшая школа, 1980 г., стр.64, 65.
2. Д. С. Пельпор, В.А.Матвеев, В.Д.Арсеньев. Динамически настраиваемые гироскопы. М., Машиностроение , 1988 г., стр.231, рис. 6, 8.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОП | 2001 |
|
RU2197715C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1995 |
|
RU2100779C1 |
| ГИРОСКОП | 2001 |
|
RU2210734C2 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2000 |
|
RU2167426C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1998 |
|
RU2140653C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2000 |
|
RU2178569C1 |
| ГИРОСКОП | 2002 |
|
RU2215261C2 |
| ГИРОСКОП | 2002 |
|
RU2210735C1 |
| ГИРОСКОП | 2005 |
|
RU2298151C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2002 |
|
RU2216713C2 |


Изобретение относится к области измерительной техники, а именно к гироскопическим преобразователям инерциальной информации. Гироскоп содержит гиромотор, ротор с внутренним карданом, преобразователи угла и магнитоэлектрические преобразователи момента по первой и второй измерительным осям, причем бескаркасные компенсационные катушки преобразователей момента с одной стороны закреплены по окружности на перпендикулярной оси вращения ротора торцевой плоскости оправки, установленной в корпусе гироскопа. Каждая компенсационная катушка закреплена дополнительно еще с двух сторон в образованных на торцевой плоскости оправки выступах, охватывающих всю часть одной половины компенсационной катушки, в которой витки направлены параллельно торцевой плоскости оправки, выступы направлены в сторону второй половины компенсационной катушки с направлением витков параллельно торцевой плоскости оправки, выступы выполнены с конфигурацией, повторяющей конфигурацию охватываемой выступами части компенсационной катушки. Техническим результатом изобретения является повышение точности гироскопа. 1 з.п. ф-лы, 6 ил.
| ПЕЛЬПОР Д.С | |||
| и др | |||
| Динамически настраиваемые гироскопы | |||
| - М.: Машиностроение, 1988, с.231 | |||
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1990 |
|
RU2027146C1 |
| US 3438270 А, 15.04.1969 | |||
| US 4316394 А, 23.02.1982. | |||

