Изобретение относится к области гидроакустики и может быть использовано для определения расстояния от антенны гидролокатора (ГЛ), предназначенного для обнаружения и сопровождения подводных объектов, например, подводных нарушителей, до обнаруженного объекта.
Расстояние до подводного объекта, находящегося в слоисто-неоднородной среде, вычисляется по времени запаздывания эхо-сигнала относительно момента излучения и средней скорости звука. Под средней скоростью звука понимается среднее значение скорости звука вдоль траектории акустического луча в пределах сектора обзора ГЛ на участке между антенной ГЛ и подводным объектом.
Для определения фактической средней скорости звука необходимо получить исходную информацию о существующем в данное время и в данном месте пространственном распределении скорости звука.
В настоящее время определение пространственной структуры поля скорости звука заключается в проведении совокупности измерений скорости звука по глубине в нескольких контрольных точках с последующим вычислением скорости звука в любой произвольной точке путем интерполяции результатов измерений. Количество контрольных точек подчинено задаче достижения возможно большей синхронности измерений по всему району предстоящих работ. Измерения проводятся с борта надводного судна и заключаются в погружении датчика скорости звука, обладающего отрицательной плавучестью.
Очевидно, что рассчитанная по таким данным средняя скорость звука, особенно для района работ, охватывающего мелководный шельфовый и глубоководный участки, может иметь погрешность больше допустимой, что обусловлено разностью гидрологических условий. Таким образом, поиск способов определения распределения скорости звука, обеспечивающих вычисление средней скорости звука, а соответственно и расстояния до подводного объекта, с допустимыми погрешностями, является важной задачей.
Известен способ определения распределения скорости звука, основанный на использовании явлений рассеяния звука в слоисто-неоднородной среде и отражения звука от дискретных рассеивателей, образующих звукорассеивающие слои (Комляков В.А. Корабельные средства измерения скорости звука и моделирования акустических полей в океане. - СПб.: Наука, 2003 г., стр. 104-107).
Этот способ предполагает узконаправленное излучение, прием рассеянных или отраженных сигналов антенной с узкой характеристикой направленности (ХН), сканируемой в вертикальной плоскости, или статическим веером узких ХН и определение значений скорости звука в областях пересечения соответствующих ХН по измеренным значениям скорости звука на горизонте излучения, временам запаздывания принятых сигналов относительно моментов излучения, углам наклона ХН и известному расстоянию между излучающей и приемной антеннами.
Недостатком данного способа является низкая надежность, обусловленная зависимостью результата определения от наличия неоднородных слоев или естественных рассеивателей в каждом из объемов жидкой среды, ограниченных ХН источника и приемника звуковых колебаний.
Наиболее близким к заявляемому изобретению по своему назначению, технической сущности и достигаемым результатам является способ определения распределения скорости звука с использованием океанологического сверхлегкого автономного необитаемого подводного аппарата (АНПА) (адреса сайтов в интернете http://www.valeport.co.uk и http://www.ecoSUB.uk).
Этот способ выполняется посредством системы, содержащей АНПА и пост управления, и предполагает перемещение АНПА в водной среде по программной траектории, периодическое измерение скорости звука, вычисление координат АНПА в процессе перемещения и передачу на пост управления накопленной АНПА информации с использованием радиоканала связи при нахождении АНПА в надводном положении, при этом программная траектория состоит из прямолинейных участков в заданном диапазоне глубин и напоминает зигзаг.
Способ-прототип обеспечивает возможность определения распределения скорости звука в заданном районе. Тем не менее, в задачах гидролокации он недостаточно эффективен, поскольку не позволяет оперативно определять распределение скорости звука вдоль траектории акустического луча. К недостаткам способа-прототипа также следует отнести необходимость периодического всплытия АНПА на открытой воде для информационного обмена, что в замерзающих морях практически не возможно.
Задача изобретения состоит в обеспечении вычисления средней скорости звука.
Технический результат реализации изобретения заключается в оперативном определении распределения скорости звука вдоль траектории акустического луча, в том числе в условиях арктических морей.
Для достижения технического результата в известный способ, в котором перемещают АНПА в водной среде по программной траектории, периодически измеряют скорость звука и вычисляют координаты АНПА в процессе перемещения, передают на пост управления накопленную АНПА информацию, введены новые признаки, а именно:
- для определения распределения скорости звука вдоль траектории акустического луча программную траекторию АНПА формируют по направлению зондирования ГЛ;
- с помощью ГЛ осуществляют непрерывное гидролокационное наблюдение за перемещением АНПА;
- по изменению эхо-сигнала от АНПА производят коррекцию траектории движения, удерживая АНПА в пределах сектора обзора ГЛ;
- при этом передача на пост управления накопленной АНПА информации, ввод в АНПА команд управления для коррекции траектории движения осуществляют с использованием гидроакустического канала связи при нахождении АНПА в подводном положении.
Использование гидролокационного наблюдения с возможностью изменения траектории АНПА при изменении траектории акустического луча позволяет оперативно определять распределение скорости звука вдоль траектории акустического луча, а применение гидроакустического канала связи обеспечивает передачу накопленной АНПА информации и команд управления без периодического всплытия АНПА, что актуально в условиях арктических морей.
Заявляемое изобретение поясняется фиг. 1-4.
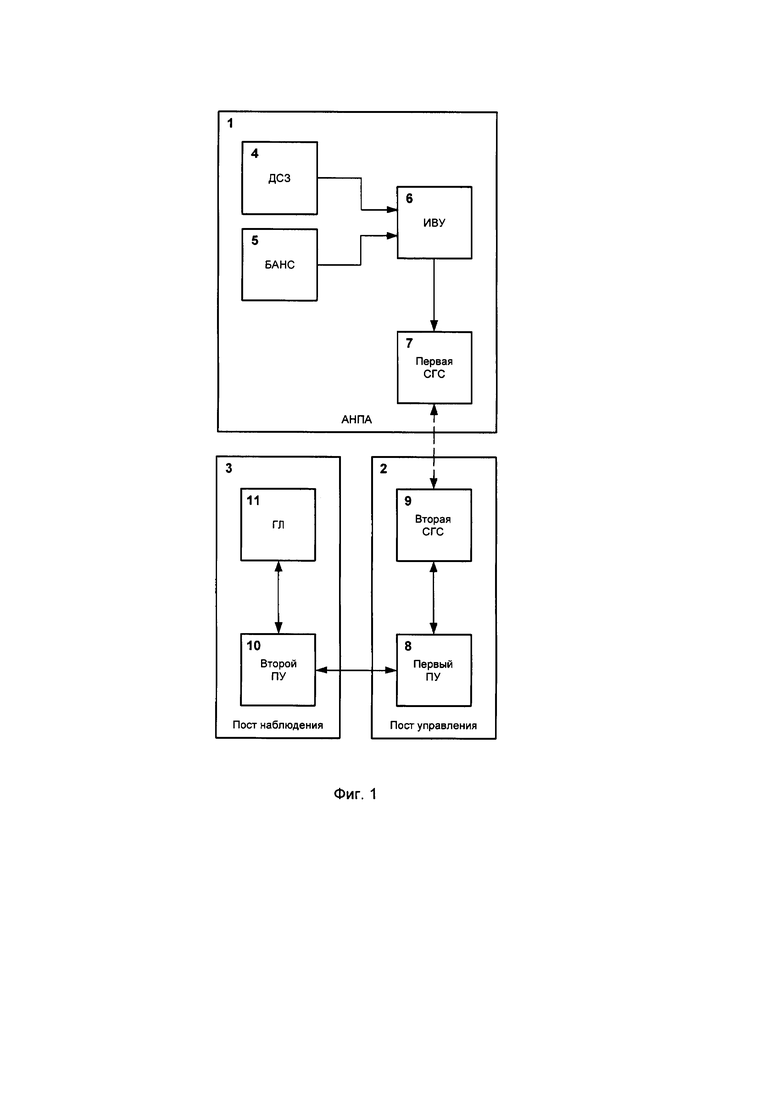
На фиг. 1 изображена функциональная схема системы, реализующей заявляемое изобретение.
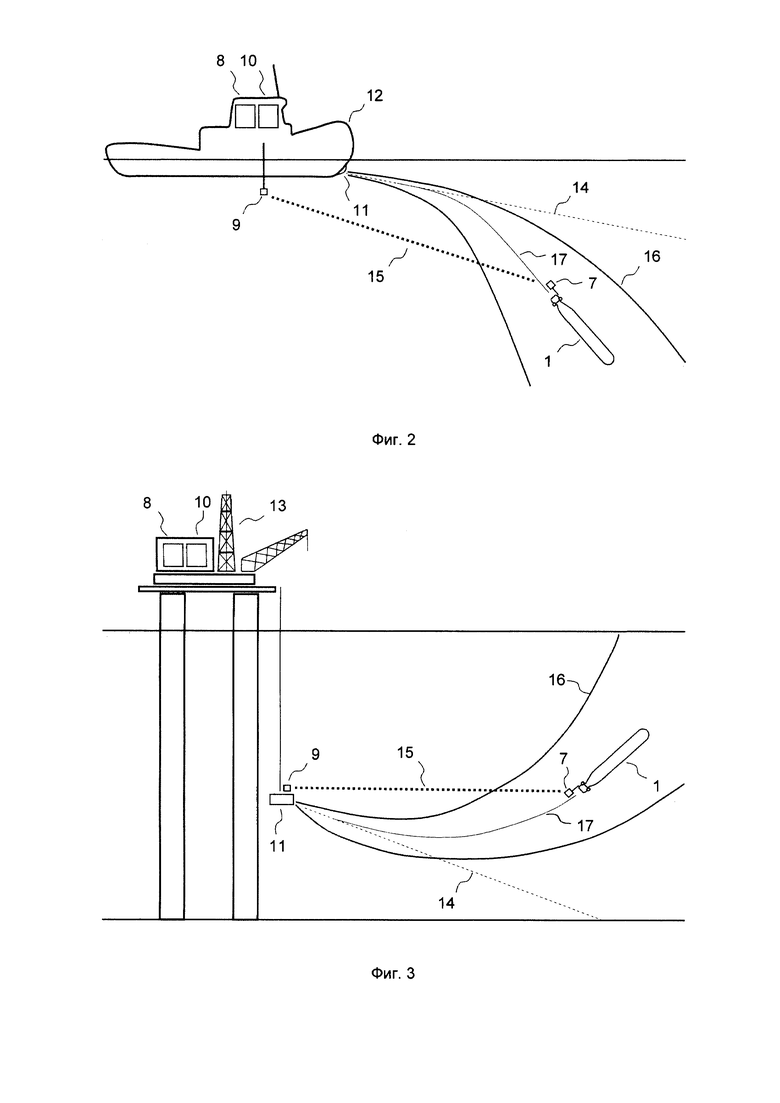
На фиг. 2 изображена общая схема реализации заявляемого изобретения с постом управления и постом наблюдения, размещенными совместно на подвижном плавсредстве - надводном судне, где 12 - надводное судно, 14 - программная траектория, 15 - гидроакустический канал связи, 16 - сектор обзора, 17 - фактическая траектория.
На фиг. 3 изображена общая схема реализации заявляемого изобретения с постом управления и постом наблюдения, размещенными совместно на неподвижном плавсредстве - морском гидротехническом сооружении 13.
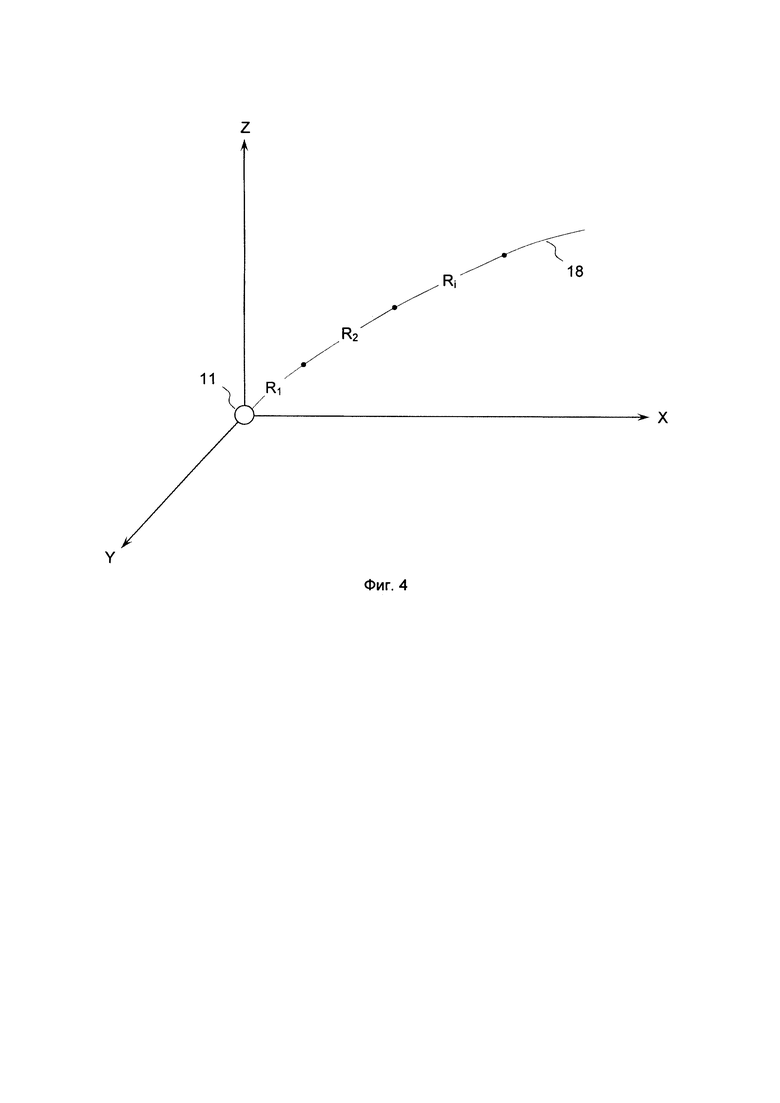
На фиг. 4 изображен акустический луч в локальной системе координат (ЛСК) XYZ с центром в точке расположения антенны ГЛ, где 18 - акустический луч, R1…Ri - длины участков траектории акустического луча, в которых скорость звука постоянна (в пределах допустимой ошибки измерений).
Система (фиг. 1), реализующая заявляемое изобретение, содержит АНПА 1, пост 2 управления и пост 3 наблюдения, при этом АНПА 1 оборудован датчиком 4 скорости звука (ДСЗ), бортовой автономной навигационной системой (БАНС) 5, информационно-вычислительным устройством (ИВУ) 6 и первой системой 7 гидроакустической связи (СГС), пост 2 управления оборудован первым пультом 8 управления (ПУ) и второй СГС 9, пост 3 наблюдения оборудован вторым ПУ 10 и ГЛ 11, при этом пост 2 управления и пост 3 наблюдения могут совместно размещаться как на подвижном плавсредстве, например, надводном судне 12 (фиг. 2), так и на неподвижном плавсредстве, например, морском гидротехническом сооружении 13 (фиг. 3).
Заявляемое изобретение осуществляется с помощью системы (фиг. 1) следующим образом.
Производится зарядка аккумуляторной батареи АНПА 1. Используя первый ПУ 8 составляется программа-задание, включающая программную траекторию 14 (фиг. 2, 3), и вводится в АНПА 1. Программная траектория 14 формируется по направлению зондирования ГЛ 11.
После проверки функционирования систем АНПА 1 переводится в водную среду. С помощью БАНС 5 осуществляется обсервация АНПА 1 перед погружением в ЛСК (фиг. 4), выход АНПА 1 на программную траекторию 14 и движение по ней.
Одновременно с этим с помощью ГЛ 11 и второго ПУ 10 осуществляется непрерывное автоматизированное гидролокационное наблюдение за перемещением АНПА 1. По изменению эхо-сигнала от АНПА 1, с помощью первого ПУ 8, первой СГС 7 и второй СГС 9 осуществляется формирование и ввод в АНПА 1 по гидроакустическому каналу 15 связи команд управления, обеспечивающих коррекцию программной траектории 14 с целью удержания АНПА 1 в пределах сектора 16 обзора ГЛ 11 и обеспечения требуемого значения эхо-сигнала от АНПА 1.
Перемещаясь в пределах сектора 16 обзора ГЛ 11 и используя ДСЗ 4, БАНС 5 и ИВУ 6, АНПА 1 производит периодическое измерение скорости звука и вычисление координат АНПА 1 в ЛСК. Полученные результаты регистрируются в памяти ИВУ 6 и периодически по гидроакустическому каналу 15 связи, с использованием первой СГС 7 и второй СГС 9, пересылаются на первый ПУ 8, а затем передаются на второй ПУ 10, где осуществляется определение распределения скорости звука вдоль фактической траектории 17 АНПА 1, повторяющей траекторию акустического луча 18, в виде трехмерного массива - матрицы с элементами C(x, y, z). Индексы матрицы задают положение точки в водной среде в ЛСК, а значение соответствующего элемента матрицы задает измеренное значение скорости звука в этой точке.
Кроме того, во втором ПУ 10 может осуществляться определение участков траектории акустического луча 18, в которых скорость звука постоянна, и вычисление средней скорости звука по формуле

где Ci - скорость звука на i-ом участке акустического луча 18, м/с; Ri - длина i-го участка траектории акустического луча 18 с постоянной скоростью звука, м.
По окончании работы АНПА 1 в соответствии с программой-заданием возвращается в заданную точку и извлекается из водной среды.
Затем производится техническое обслуживание АНПА 1, включая зарядку аккумуляторной батареи и ввод очередной программы-задания, при необходимости.
Следует отметить, что при совместном размещении поста 2 управления и поста 3 наблюдения на подвижном плавсредстве, например, надводном судне 12, работа АНПА 1 происходит в дрейфе.
Кроме того, АНПА 1 движется равномерно с небольшой скоростью, что позволяет выполнить большое число измерений скорости звука вдоль траектории акустического луча 18 для обеспечения вычисления средней скорости звука с допустимой погрешностью.
Таким образом, заявляемое изобретение обеспечивает оперативное определение распределения скорости звука вдоль траектории акустического луча. Введение в систему поста наблюдения, первой и второй СГС позволяет решить поставленную задачу в условиях арктических морей без всплытия АНПА, и это позволяет считать, что технический результат достигнут.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВОДНОГО ТРУБОПРОВОДА | 2011 |
|
RU2472178C1 |
| СТАНЦИЯ ИНДИКАЦИИ КАЧЕСТВА ВОДНОЙ СРЕДЫ | 2004 |
|
RU2269801C2 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ РЕЛЬЕФА И ОСАДКИ ПОДВОДНОЙ ЧАСТИ АЙСБЕРГА | 2016 |
|
RU2623830C1 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| НАВИГАЦИОННАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ОСВЕЩЕНИЯ БЛИЖНЕЙ ОБСТАНОВКИ | 2001 |
|
RU2225991C2 |
| Мультистатическая система подводного наблюдения | 2019 |
|
RU2713005C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ОБЪЕКТА В ОТКРЫТОЙ АКВАТОРИИ | 2017 |
|
RU2650798C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| Способ классификации целей, адаптированный к гидроакустическим условиям | 2016 |
|
RU2624826C1 |
Заявляемое изобретение относится к области гидроакустики, в частности к способам измерения скорости звука. Способ определения распределения скорости звука заключается в перемещении автономного необитаемого подводного аппарата (АНПА) в водной среде по программной траектории, периодическом измерении скорости звука, вычислении координаты АНПА в процессе перемещения и периодической передаче на пост управления накопленной АНПА информации. При этом для определения распределения скорости звука вдоль траектории акустического луча программную траекторию АНПА формируют по направлению зондирования гидролокатора (ГЛ), с помощью ГЛ осуществляют непрерывное гидролокационное наблюдение за перемещением АНПА, по изменению эхо-сигнала от АНПА производят коррекцию траектории движения, удерживая АНПА в пределах сектора обзора ГЛ, при этом передача на пост управления накопленной АНПА информации, ввод в АНПА команд управления для коррекции траектории движения осуществляют с использованием гидроакустического канала связи при нахождении АНПА в подводном положении. Технический результат реализации изобретения заключается в оперативном определении распределения скорости звука вдоль траектории акустического луча, в том числе в условиях арктических морей. 4 ил.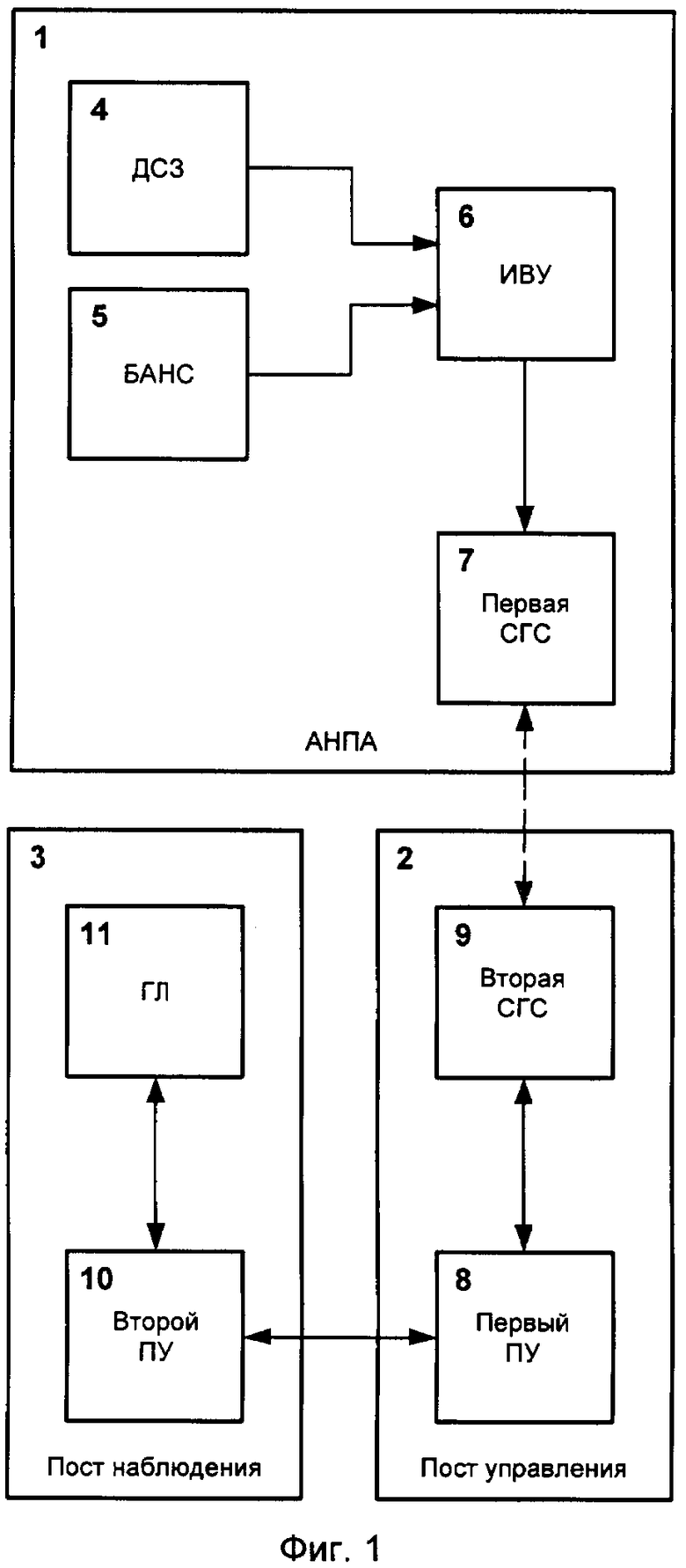
Способ определения распределения скорости звука, в котором перемещают автономный необитаемый подводный аппарата (АНПА) в водной среде по программной траектории, периодически измеряют скорость звука, вычисляют координаты АНПА в процессе перемещения и периодически передают на пост управления накопленную АНПА информацию, отличающийся тем, что для определения распределения скорости звука вдоль траектории акустического луча программную траекторию АНПА формируют по направлению зондирования гидролокатора (ГЛ), с помощью ГЛ осуществляют непрерывное гидролокационное наблюдение за перемещением АНПА, по изменению эхо-сигнала от АНПА производят коррекцию траектории движения, удерживая АНПА в пределах сектора обзора ГЛ, при этом передача на пост управления накопленной АНПА информации, ввод в АНПА команд управления для коррекции траектории движения осуществляют с использованием гидроакустического канала связи при нахождении АНПА в подводном положении.
| Матвиенко Ю.В., Борейко А.А., Костенко В.В | |||
| и др | |||
| Комплекс робототехнических средств для выполнения поисковых работ и обследования подводной инфраструктуры на шельфе // Подводные исследования и робототехника | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ЗВУКА | 2015 |
|
RU2581416C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ЗВУКА ПО ТРАССЕ | 2016 |
|
RU2625716C1 |
| Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата большой автономности, совершающего протяженный подводный переход | 2018 |
|
RU2687844C1 |
| CN 0106896363 B, 11.06.2019 | |||
| CN | |||

