Изобретение относится к системам подъема или перемещения тела с сохранением его изначального положения относительно горизонта или заданной поверхности. Устройство может быть использовано при проектировании и строительстве новых и модернизации существующих складских помещений, многоярусных автомобильных паркингов и гаражей, в производстве машин, строительстве и других отраслях промышленности.
1) Известно изобретение по патенту RU 2025460C1 «ПОДЪЕМНИК».
Изобретение представляет способ перемещения грузов с использованием рычажной системы "ножниц", канатной системы с полиспастом и лебедкой. Этот механизм позволяет улучшить функциональность и эффективность подъемника при обслуживании автомобилей, на складах и в других местах, где необходимо поднимать грузы.
Этот механизм состоит из основания с установленной на нем стойкой, подъемного стола, и рычажной системы "ножниц", которая поднимает и опускает стол. Он также включает канатную систему с полиспастом и лебедкой, что обеспечивает эффективное поднятие и опускание грузов. Механизм работает на основе рычажной системы "ножниц", канатной системы с полиспастом и лебедкой, что обеспечивает поднятие и опускание грузов.
Преимуществами изобретения являются минимальная высота подъемного стола в нижнем положении, снижение усилий в приводе, простота конструкции и надежность. Однако недостатками могут быть ограничение по высоте подъема и ограничения в грузоподъемности, в зависимости от конкретной конструкции.
2) Известно изобретение по патенту SU 1 650 569 A1 «Подъемник».
Изобретение представляет способ перемещения грузов с использованием перекрещивающихся рычагов и ходовых винтов. Этот механизм повышает надежность и обеспечивает стабильное перемещение платформы.
Устройство состоит из основания, подъемной платформы и двух пар перекрещивающихся рычагов, соединенных шарнирно между собой и с основанием и подъемной платформой. Привод относительного поворота рычагов включает ходовые ролики и вторые рычаги, связанные с осью ходовых роликов. Винтовые передачи и ходовые винты обеспечивают движение механизма, а поводки и перекрещивающиеся рычаги формируют шарнирно-рычажный параллелограммный механизм для перемещения платформы.
Устройство работает путем использования перекрещивающихся рычагов, ходовых винтов и вторых рычагов, создавая шарнирно-рычажный параллелограммный механизм для поднятия и опускания подъемной платформы.
Достоинства устройства, описываемого в тексте, включают высокую надежность и стабильность в перемещении платформы, а также возможность поднимать тяжелые грузы. Однако недостатками являются ограниченная маневренность и неспособность работать на неровных поверхностях, требование к подготовленной площадке.
3) Известно изобретение по патенту CN111152194A «Механизм бесконечного оборота с одной степенью свободы».
Изобретение включает в себя три антипараллелограммных блока, обозначенных как A-a, A-b и A-c. Каждый из этих блоков состоит из четырех стержневых элементов. Связующие элементы, такие как соединительные соединения, обеспечивают вращательное соединение между блоками и стержнями, обеспечивая бесконечное вращательное движение механизма.
Механизм работает благодаря соединительным элементам и вращательным связям между стержневыми элементами и антипараллелограммными блоками. Эти соединительные элементы и связи обеспечивают возможность бесконечного вращательного движения механизма с одной степенью свободы.
Достоинствами механизма являются его способность к бесконечному вращению и увеличенная жесткость благодаря конфигурации антипараллелограммных блоков. Однако недостатками являются ограничение в количестве оборотов и более сложная конструкция, и обработка по сравнению с обычными механизмами.
4) Наиболее близким по технической сущности и достигаемому техническому результату, выбранное заявителем в качестве прототипа, является изобретение по патенту RU94963U1 «ПОДЪЕМНИК ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ».
Изобретение раскрывает способ перемещения грузов. Изобретение содержит подъемный пантограф ножничного типа, включающий в себя по меньшей мере две группы ножничных элементов, подъемную площадку на верху подъемного пантографа и по меньшей мере один основной гидроцилиндр, который одним своим концом закреплен на одном из основания подъемника или подъемной площадки, а другим своим концом скреплен с по меньшей мере одним из ножничных элементов подъемного пантографа, при этом в подъемном пантографе ножничного типа каждая следующая, считая от основания подъемника, пара ножничных элементов шарнирно прикреплена к соответствующей предыдущей паре ножничных элементов так, что в сложенном состоянии каждая следующая пара ножничных элементов размещена внутри предыдущей пары ножничных элементов. Подъем в устройстве осуществляется благодаря приведенному в достижение гидравлическим устройством механизму ножниц, который раскрывается и закрывается, поднимая и опуская рабочую платформу или кабину.
Устройство обладает следующими преимуществами: Высокая стабильность и надежность при поднятии, большая грузоподъемность и площадь рабочей платформы, подходят для вертикального подъема на высоту, относительно низкие затраты на обслуживание.
Недостатками данного устройства являются ограничение по маневренности и доступу в узкие места, устройство не подходит для работы на неровной или нежесткой поверхности и требуют уровненной подготовленной площадки для стабильной работы.
Задачей и техническим результатом заявленного устройства является разработка устройства для подъема или перемещения тела с сохранением его изначального положения относительно горизонта или заданной поверхности без вращения, что способствует повышению устойчивости конструкции обеспечению стабильности и точности позиционирования тел.
Технический результат достигается за счет модульной конструкции устройства, которая даёт возможность одновременного и согласованного действия всех элементов устройства, а также элементов всех модулей, что повышает его эффективность и точность.
Описание устройства:
Устройство для подъема и перемещения объектов с сохранением их ориентации имеет несколько рабочих положений, а именно верхнее положение устройства, нижнее положение устройства и множество промежуточных положений.
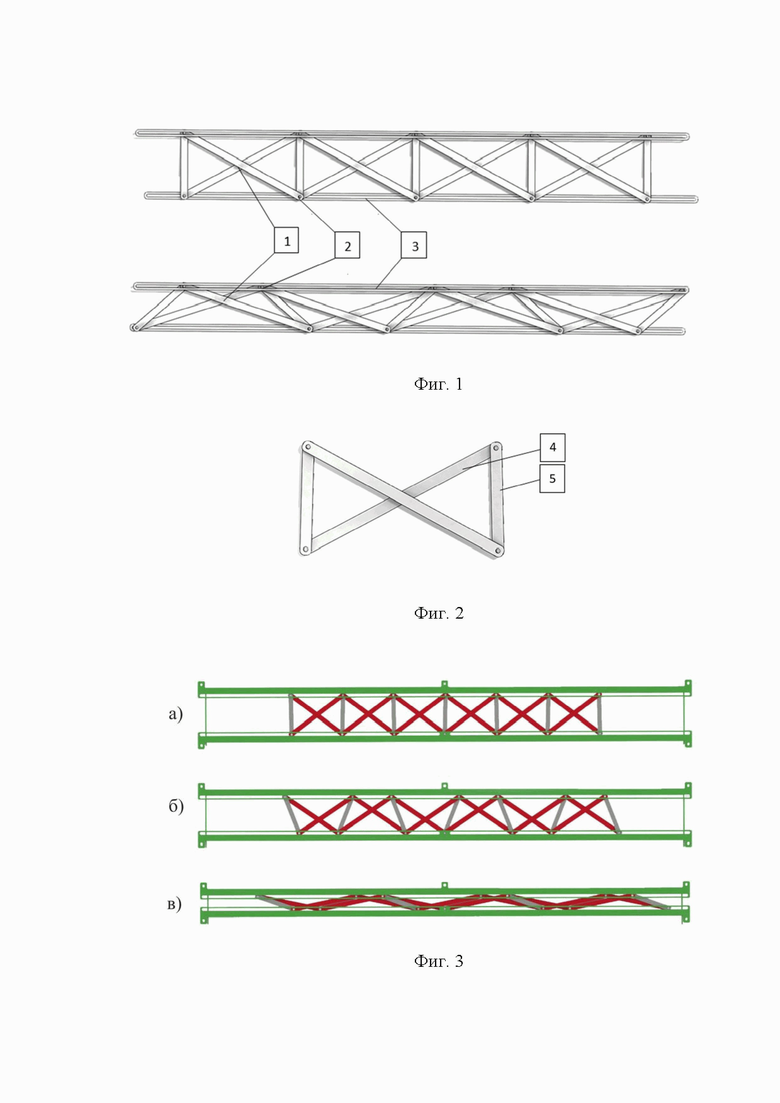
Устройство состоит из цепочки модулей, соединенных между собой с помощью шарнирных и других кинематических пар. Под модулем механизма подразумевается совокупность 4 звеньев механизма. (Фиг.1-4.)
Модулей механизма может быть столько, сколько требует проектируемая конструкция, а именно любое количество. Основу конструкции составляют параллельные звенья модулей (например, звено 3 модуля 1 и звено 3 модуля 2), обеспечивающие согласованное движение всех элементов при перемещении.
Устройство также включает в себя бобышки или роликовые колеса, а также рейки с направляющими пазами для роликовых колес или бобышек.
Одна из реек с направляющими пазами для роликовых колес или бобышек взаимодействует с фиксирующей поверхностью, другая рейка взаимодействует с рабочим телом, при этом рейки с направляющими пазами для роликовых колес при движении остаются параллельными. На обоих концах рейки с направляющим пазом для роликовых колес, которая взаимодействует с рабочим телом, имеются прямые стержни, направленные вниз, которые концентричны отверстиям, расположенным на обоих концах нижней горизонтальной рейки с направляющим пазом для роликовых колес, и сопрягаются с ними для обеспечения неизменности горизонтального перемещения параллельных реек с направляющими пазами для роликовых колес.
Одна из бобышек или роликовых колёс, фиксируется за одну из реек с направляющим пазом для бобышек или роликовых колес. Это обеспечивает неподвижность роликового колеса или бобышки вдоль рейки с направляющим пазом для роликовых колес.
Для изменения положения звеньев модулей используется одно из звеньев 3 или 4, которое одним концом шарнирно закреплено за одну из реек с направляющим пазом для бобышек или роликовых колес и имеет одну степень свободы.
Во время вращения одной из коротких реек вокруг соей оси любым из возможных способов происходит изменение расстояния между двумя параллельными рейками с направляющими пазами для роликовых колес или бобышек.
Устройство может быть использовано в различных сферах, где требуется параллельный одновременный подъем нескольких тел, либо одного тела с сохранением его изначального положения относительно горизонта или обеспечения постоянного давления на грани и кромки тел во время их перемещения.
Благодаря использованию устройства увеличить точность устройств, где необходим подъем или перемещение тела с сохранением его изначального положения относительно горизонта или заданной поверхности.
Основным техническим параметром данного устройства является подъемная и передвижная способность, то есть его способность поднимать или перемещать одно тело (нескольких тел) с сохранением его (их) изначального положения относительно горизонта или обеспечения постоянного давления на грани и кромки тел во время их перемещения.
Эффективность обеспечивается за счет того, что все детали устройства работают одновременно и согласовано даже при воздействии только на один из элементов устройства, что позволяет в более легкой форме управлять расстоянием между рейками с направляющими пазами для роликовых колес. Благодаря этому устройство обеспечивает точное позиционирование тел при их подъеме и передвижении.
Основой конструкции является система параллельных звеньев, шарнирно соединенных между собой и обеспечивающих согласованное перемещение с сохранением ориентации объекта.
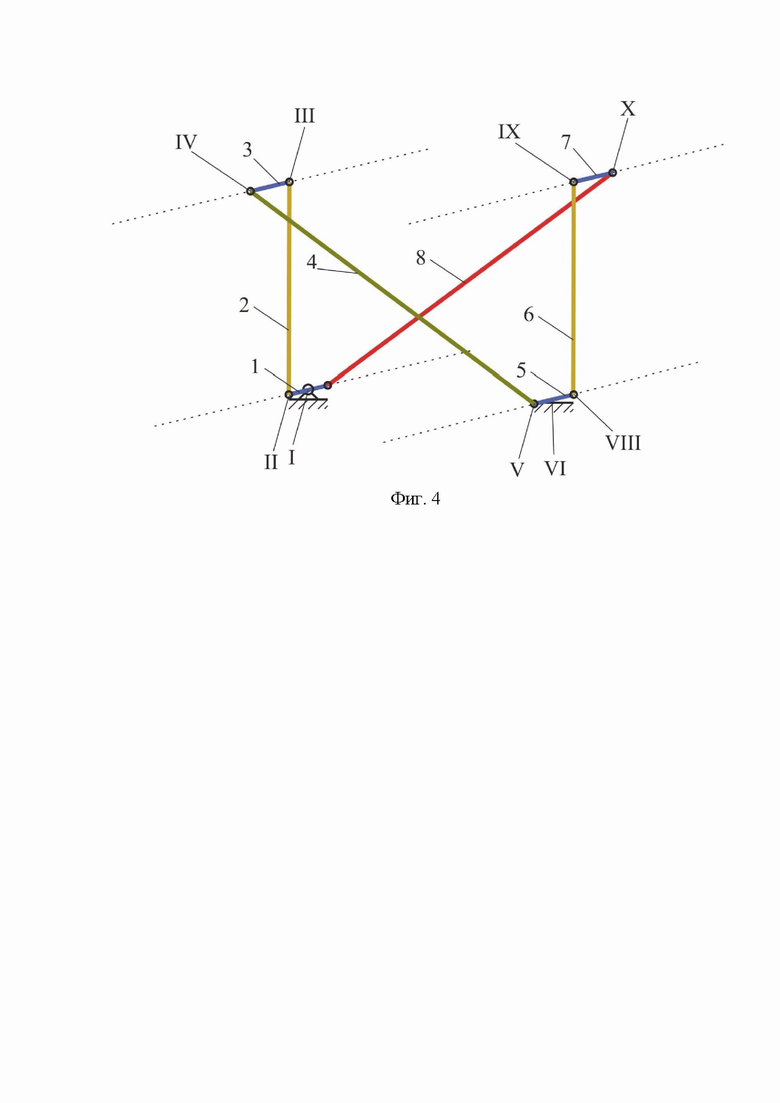
Механизм имеет четыре звена. Звенья 1 и 2 способны вращаться относительно шарниров и образуют крестовидную структуру. Звенья 3 и 4 выполняют функцию поддержания устойчивости и уравновешивают механизм в процессе работы.
Для изменения положения звеньев модулей используется одно из звеньев 3 или 4, которое одним концом шарнирно закреплено за одну из реек с направляющим пазом для бобышек или роликовых колес и имеет одну степень свободы.
Приводные модули обеспечивают вращение некоторых звеньев этой системы, что приводит к согласованному перемещению всех элементов без нарушения ориентации рабочего тела. Для изменения положения звеньев модулей используется один, который закреплен за одно из звеньев модуля на конце которого находится бобышка или колесо, которое фиксируется за одну из реек с направляющим пазом для бобышек или роликовых колес.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНОЕ УСТРОЙСТВО | 1994 |
|
RU2038281C1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 1994 |
|
RU2038280C1 |
| Подъемник | 1988 |
|
SU1586994A1 |
| Устройство для перегрузки изделий | 1989 |
|
SU1691231A1 |
| Устройство для укладки паллеты | 2018 |
|
RU2785653C2 |
| ГОРИЗОНТАЛЬНЫЙ МАССАЖЕР | 2004 |
|
RU2318486C2 |
| ПОДЪЕМНИК | 2011 |
|
RU2463242C1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 1994 |
|
RU2038279C1 |
| ПАНТОГРАФ | 2017 |
|
RU2665978C1 |
| Установка для многодуговой автоматической сварки | 1988 |
|
SU1722757A1 |
Устройство относится к области механических устройств для подъема и перемещения объектов с сохранением их ориентации относительно горизонта или заданной поверхности. Устройство включает модульную конструкцию, содержащую рейки, соединенные друг с другом посредством шарнирных соединений на концах. Достигается эффективность и надежность подъема и перемещения объектов с сохранением их ориентации, а также точное позиционирование объектов, что гарантирует правильное и безопасное выполнение технологических процессов. 4 з.п. ф-лы, 4 ил.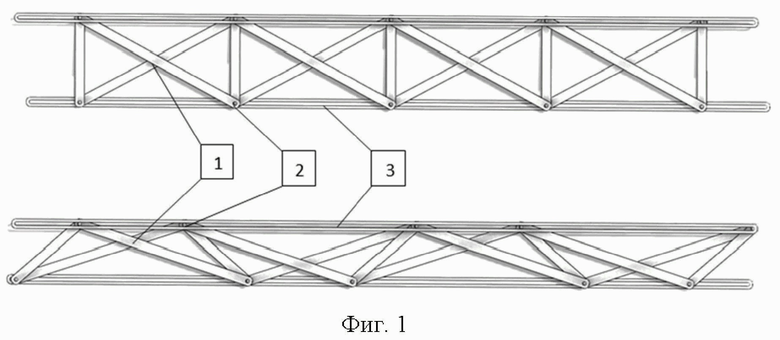
1. Устройство для перемещения тела относительно горизонта, включающее модули, каждый из которых включает в себя две длинные скрещивающиеся, но непересекающиеся рейки (4) и две короткие пересекающиеся рейки (5), соединенные друг с другом посредством шарнирных соединений на концах (2), отличающееся тем, для изменения положения звеньев модулей используется одно из звеньев, которое одним концом шарнирно закреплено за одну из реек с направляющим пазом для бобышек или роликовых колес и имеет одну степень свободы.
2. Устройство для перемещения тела относительно горизонта по п.1, отличающееся тем, что включает в себя роликовые колеса на концах реек с отверстиями, рейки введены в сопряжение с направляющими пазами в рейках для роликовых колес или бобышек, рейки с направляющими пазами для роликовых колес располагаются параллельно друг другу, а роликовые колеса фиксируются в пазах рейки с направляющими пазами для роликовых колес или бобышек.
3. Устройство для перемещения тела относительно горизонта по п.1, отличающееся тем, что на обоих концах верхней рейки с направляющим пазом для роликовых колес, которая взаимодействует с рабочим телом, имеются прямые стержни, направленные вниз, которые концентричны отверстиям, расположенным на обоих концах нижней горизонтальной рейки с направляющим пазом для роликовых колес, и сопрягаются с ними.
4. Устройство для перемещения тела относительно горизонта по п.1, отличающееся тем, что несколько цепей модулей, параллельных друг другу и закрепленных нижними рейками с направляющими пазами для роликовых колес, объединены в одно устройство.
5. Устройство для перемещения тела относительно горизонта по п.1, отличающееся тем, что включает в себя звено, которое одним концом шарнирно закреплено за одну из реек с направляющим пазом для бобышек или роликовых колес и имеет одну степень свободы.
| ПОДЪЕМНОЕ ВИНТОВОЕ УСТРОЙСТВО | 2022 |
|
RU2797849C1 |
| Устройство для сравнительных испытаний фотоэлементов | 1932 |
|
SU36524A1 |
| US 3034765 A, 15.05.1962 | |||
| Передвижной подъемник | 1982 |
|
SU1087459A1 |

