Изобретение относится к подъемному оборудованию, в частности, к подъемникам для перемещения грузов и может быть использовано в промышленных целях, бытовых и торговых, для строительных работ и подъема грузов и людей на различную высоту в других целях. В особенности, использование изобретения позволяет заменить «строительные леса» (металлические сборные, деревянные самодельные и т.д.)
При осуществлении строительных работ для подъема на высоту грузов или проведения работ на высоте используют сборные металлические конструкции (леса), требующие монтажа, установки, перемещений и т.д. Осуществление таких действий одному человеку затруднительно, а сама конструкция является дорогостоящей. В качестве альтернативы используются вышки с электроприводом, позволяющие экономить время на сборке/разборке, а также способные к применению по окончании работ в иных целях повторно. Такие устройства могут использоваться одним человеком.
Подъемные устройства имеют различную конфигурацию, среди них подъемные вышки, самоходные и стационарные, ножничного (пантографного) типа с использованием гидропривода, телескопические выдвижные вышки и др.
Конструкция так называемого ножничного подъемника представляют собой систему рычагов, связанную с одной стороны с опорой, а с другой - с подъемной платформой (площадкой), которая за счет работы рычагов способна перемещаться в вертикальной плоскости.
Для приведения ножничных рычагов в движение используются различные виды приводных механизмов. Наиболее широко применяются ножничные подъемники с гидравлическим приводом. Такие решения представляют собой сложную и дорогостоящую конструкцию, сложную в эксплуатации и ремонте, в частности, чувствительную к температурам, а также выходу из строя прокладок и, как следствие, течи масла и др. трещин шлангов высокого давления и т.д. Для подъема груза небольшого веса на относительно небольшую высоту около 5 метров использование сложных систем на гидравлическом приводе нецелесообразно.
Известно использование винтового механизма для подъемных устройств ножничного типа, что позволяет преодолеть недостатки устройств с гидравлическим приводом. Среди таких винтовых устройств можно выделить, в частности, винтовые домкраты, подъемные столы, а также подъемные устройства, позволяющие поднимать человека и грузы на необходимую высоту для осуществления там работ. Каждый из этих видов устройств имеет специфическое назначение, обуславливающее их конструктивные особенности. Так домкраты используют для подъема тяжелых конструкций на небольшую высоту. Подъемные столы используют для подъема грузов средней и большой тяжести на относительно небольшую высоту. Подъемные площадки (или подъемники) используют для подъема грузов на среднюю и большую высоту, а также людей для выполнения работ на высоте.
Известны грузоподъемный стол с винтовым механизмом [Патент RU 2329943, опубл. 27.07.2008, приор. от 13.12.2006, B66F 7/06 (2006.01), B66F 3/22 (2006.01)], а также подъемное устройство винтовой конструкции [RU 2258665, приор. от 07.08.2003, опубл. 20.08.2005, МПК B66F 7/06 (2000.01), B66F 3/22 (2000.01)]. Устройства используют винтовой привод для перемещения ножничных рычагов, но имеют сложную конструкцию (в частности, более одного винта), что соответственно усложняет эксплуатацию и обслуживание. Устройства позволяют перемещать груз только на небольшую высоту, не предусматривают резервный способ спуска с высоты.
Известно также электромеханическое подъемное устройство ножничной конструкции [Патент SK501212015U1 на полезную модель, опубл. 01.06.2015, B66F3/22; B66F3/44; B66F7/06], содержащее несущую конструкцию, исполнительный механизм, электродвигатели, трапециевидные винты, гайки, редукторы, корпусы подшипников. Первый электродвигатель установлен на опорном корпусе, который через первый редуктор соединен с первым трапециевидным винтом, установленным на одной стороне корпуса подшипника, и с первой гайкой, установленной на первом кронштейне, которая с обеих сторон шарнирно соединена поперечными рычагами с опорной конструкцией ножниц. Аналогичным образом установлены второй электродвигатель, второй редуктор, соединенные со вторым винтом и второй гайкой, а затем связанные с рычагами. Кронштейн шарнирно соединен с обеих сторон поперечными рычагами с ножничной конструкцией, шарнирно установленной с обеих сторон ножками в двух параллельных линейных направляющих, соединенных с опорным корпусом. Устройство также содержит систему управления ходом подъема.
Устройство предназначено для плавного, точного, быстрого и безопасного перемещения грузов. Оно способно заменить альтернативные устройства с гидравлическим приводом, но имеет крайне сложную конструкцию, обеспечивающую реализацию его специфического назначения – плавного подъема очень тяжелых грузов с достаточно большой точностью определения необходимой высоты подъема. В частности, использование двух винтов и двух двигателей усложняет конструкцию, а также делает ее более зависимой от естественных процессов износа деталей, естественных люфтов и связанных с ними перекосов конструкции.
При этом устройство позволяет поднять груз на небольшую высоту, то есть не решает задачу подъема человека на высоту нескольких метров для осуществления высотных работ. Приводной механизм расположен в основании устройства, что делает невозможным прямой доступ к нему при эксплуатации единственными пользователем, то есть пользователем, находящимся на подъемной площадке в верхнем положении без привлечения помощников.
Для решения большинства рядовых задач подъема на высоту не требуется сложная конструкция, как предложено в SK501212015U1. В то же время примененный винтовой механизм подъема при использовании, например, винтовых домкратов, показал свою эффективность, долговечность и простоту эксплуатации.
Таким образом, заявляемое изобретение направлено на разработку конструкции подъемного устройства, которое заменит широко используемые устройства с гидравлическим приводом, сложные в эксплуатации и обслуживании, недолговечные. При этом для эффективного применения по заявленному назначению устройство с использованием винтового привода не должно иметь сложную конструкцию, что позволит упростить его обслуживание и ремонт.
Техническим результатом, достигаемым при реализации заявляемого изобретения, является упрощение конструкции винтового подъемного устройства, главным образом его приводного механизма. При этом повышается ее износостойкость, ремонтопригодность, надежность, в том числе за счет равномерного перемещения рычагов и жесткости конструкции. Благодаря упрощению конструкции снижается цена устройства. При исполнении устройства с расположением подъемного механизма на подъемной площадке обеспечивается расширение эксплуатационных возможностей, а также повышение надежности устройства. Кроме того, устройство компактно в сложенном состоянии, то есть удобно при хранении, а также перемещении между местами использования.
Заявляемое подъемное винтовое устройство содержит:
грузовую платформу и подъемную площадку, соединенную с платформой с помощью по крайней мере двух пар подвижно соединенных между собой рычагов ножничного типа, причем пары рычагов связаны между собой поперечинами для обеспечения жесткости и стабильности конструкции,
приводной механизм, содержащий установленный с возможностью вращения вокруг своей оси винтовой приводной вал (винт), связанный цепной передачей с двигателем и редуктором, обеспечивающие движение, передающееся рычагам,
с двух сторон на винт установлены гайки с возможностью перемещения вдоль винта при его движении, каждая из которых связана с ножничными рычагами парой симметрично размещенных укосин, что позволяет передавать движение винта рычагам и обеспечить при этом равномерную тягу, необходимую для равномерного перемещения рычагов,
при этом концы рычагов, связанные с приводным механизмом непосредственно, установлены с возможностью перемещения под его воздействием для передачи движения винта рычагам по всей их высоте,
противоположные им концы, соединенные одной из поперечин, установлены неподвижно, а соединенные другой поперечиной – с возможностью перемещения под действием связанных с приводным механизмом концов рычагов.
Предпочтительно винт имеет разнонаправленную резьбу, то есть с одной стороны винта выполнена правая резьба, а с другой – левая. Это обеспечивает без существенного усложнения конструкции (в том числе без использования дополнительного винта) возможность движения гаек под воздействием винта соответственно друг к другу (стягивая их) или друг от друга (отдаляя) для подъема или спуска площадки.
Кроме того, винт предпочтительно связан с двигателем через электромагнитную муфту, позволяющую размыкать связь винта и двигателя в случае его отключения и использовать резервный способ спуска площадки вниз в аварийной ситуации.
Приводной механизм предпочтительно размещен на подъемной площадке. При этом внизу концы рычагов, соединенные одной из поперечин, неподвижно соединены с платформой, а концы, соединенные другой поперечиной, установлены с возможностью перемещения вдоль платформы. Рычаги (концы рычагов) сверху установлены с возможностью перемещения вдоль площадки под действием укосин.
Размещение приводного механизма на подъемной площадке позволяет:
- находящемуся на площадке пользователю иметь доступ к основным элементам устройства при нахождении на высоте, осуществлять при необходимости оперативный ремонт, а также обеспечивается доступ к внешнему источнику питания, размещенному на высоте;
- использовать устройство при размещении грузовой платформы на поверхности, покрытой водой, например, при затоплении помещения и/или местности, так как исключается контакт основных узлов с водой, а также попадание строительной грязи на элементы конструкции.
Связь укосин, а через них вала и гаек на валу с рычагами может обеспечиваться через поперечину ножничных рычагов. Так каждая пара укосин может быть соединена с соответствующей прилегающей к ней поперечиной ножничных рычагов.
Поперечина, соединяющая пару смежных рычагов, предпочтительно имеет выгнутую вниз форму для размещения рычагов и винта в платформе в сложенном состоянии устройства. Для размещения двигателя, дно платформы может иметь углубление, в которое погружается двигатель для полного складывания устройства. За счет этого устройство компактно и удобно в хранении и перемещении. Для снижения веса и упрощения перемещения платформа может быть выполнена полой.
По углам платформы установлены упоры, содержащие кронштейн с возможностью поворота относительно платформы и присоединенный к нему опорный стержень, установленный с возможностью регулировки вертикального положения, которые позволяют фиксировать платформу на выбранной поверхности даже при перепадах ее высоты.
В отличие от устройств, основанных на системах гидропривода, заявляемое подъемное устройство не подвержено температурным изменениям, кроме температурного режима используемых электроузлов (двигатель, редуктор, муфта). Таким образом, устройство может функционировать при любых погодных условиях.
Сущность изобретения поясняется чертежами, где изображено предпочтительное исполнение устройства, а именно:
- на фиг. 1 – общий вид устройства;
- на фиг. 2 – вид устройства сверху ¾, где для удобства обзора приводного механизма удалены дно и ограждение площадки, некоторые рычаги;
- на фиг. 3 – вид площадки снизу ¾ (без ограждения и дна, некоторых перекладин дна).
Заявляемое устройство (см фиг. 1) содержит платформу 1, на которой располагается связанная с ней рычагами 2 ножничного типа площадка 3 с ограждением 4. Устройство содержит винтовой приводной механизм для изменения положения ножничных рычагов 2, а через них и высоты расположения площадки 3. Для упрощения перемещения устройства платформа 1 может содержать колеса 5.
Платформа 1 имеет борты 6, высота которых определяется таким образом, чтобы при складывании рычагов 2 они могли полностью погрузиться в платформу 1. Платформа 1 может содержать упоры 7, расположенные по ее углам и обеспечивающие установку устройства в устойчивом положении на опорной поверхности. Упоры 7 содержат установленный с возможностью поворота относительно точки закрепления кронштейн 8 (см. фиг. 2), на краю которого с возможностью регулировки вертикального положения размещен опорный стержень. Регулировка вертикального положения может осуществляться, например, при выполнении опорного стержня в виде шпильки 9 с резьбой и опорной лапкой 10 на конце, установленной на противоположном краю кронштейна 8. Шпилька 9 с помощью рукоятки 11 выкручивается на необходимую высоту для упора об опорную поверхность. Таким образом, горизонтальное положение платформы 1 может быть отрегулировано и выровнено.
Платформа 1 выполнена полой внутри, что позволяет уменьшить вес конструкции и упростить перемещение устройства. При этом для придания конструкции необходимой устойчивости могут быть использованы дополнительные утяжелители, в т.ч. тяжелые строительные материалы, используемые в работах (например, шлакоблоки). Такие утяжелители помещаются на платформу 1 на период работ для устойчивости и удаляются с платформы для перемещения подъемника.
На дне платформы 1 может быть выполнено углубление 12 для размещения двигателя 13, что позволяет минимизировать размеры подъемника в сложенном состоянии.
Рычаги 2 ножничного типа выполнены в виде по крайней мере двух пар соединенных между собой стержней. Пары рычагов жестко соединяются между собой поперечинами 14 для обеспечения связи между парами, большей жесткости и стабильности конструкции, равномерности их перемещения. Причем поперечина 14 может иметь выгнутую вниз форму для того, чтобы в сложенном положении подъемника она занимала наиболее близкое к земле положение и обеспечивала нишу для расположения винта 15 подъемного механизма. Так рычаги 2 полностью складываются в платформу 1 и устройство становится более компактным и удобным для хранения.
Рычаги 2 пары соединены между собой подвижно в центре, то есть с возможностью перемещения друг относительно друга, например, с помощью шарнирного соединения. Фиксация рычагов между собой обеспечивает целостность конструкции, а выполнение ее подвижной позволяет передавать движение приводного механизма рычагам 2 по всей высоте конструкции.
Рычаги 2 связаны с приводным винтовым механизмом для обеспечения возможности их перемещения. Так концы рычагов 2, которые непосредственно связаны с приводным механизмом, установлены с возможностью перемещения под воздействием приводного механизма. Причем под концами рычагов понимаются части рычагов, соединенные с площадкой или платформой, то есть с опорой или перемещаемой поверхностью, а не с другими рычагами для продолжения их длины.
Концы рычагов 2, противоположные непосредственно связанным с приводным механизмом концам, устанавливаются иным образом. Так с одной стороны концы рычагов 2 из разных пар, то есть соединенные одной из поперечин 14, устанавливаются неподвижно. А концы рычагов с другой стороны, то есть соединенные другой поперечиной 14, размещаются так, чтобы обеспечить их перемещение под действием перемещения связанных с винтом концов рычагов 2, что повышает надежность конструкции. При неподвижной фиксации рычагов с одной из сторон повышается жесткость конструкции, исключаются качения рычагов, минимизируются рабочие люфты, а также в целом повышается надежность конструкции, так как исключаются излишние перемещения рычагов, влекущие за собой возможное их смешение с траектории перемещения (например, выход с направляющей).
Высота подъема площадки 3 может быть скорректирована путем добавления рычагов 2 ножничного типа без существенных конструктивных изменений остальных узлов устройства.
Для управления передвижением ножничных рычагов 2 устройство содержит подъемный приводной винтовой механизм (см. фиг. 2,3), включающий винтовой приводной вал 15 (винт 15), связанный цепной передачей 19 с двигателем 13 (например, электродвигателем) и редуктором. Так на вал редуктора надета звезда 20, которая с помощью цепной передачи 19 передает крутящий момент на звезду 21, установленную муфте 22 которая в свою очередь сопряжена с винтом 15.
Винт 15 предпочтительно выполнен из высокопрочной стали (закаленная сталь). В средней части винта 15 размещено посадочное место для муфты. От середины к краям винта 15 выполнена разнонаправленная резьба (через равное расстояние). То есть с одной стороны винта выполняется правая резьба, а с другой – левая.
Как отмечено выше, звезда 21 устанавливается на винт 15 через электромагнитную муфту 22 предпочтительно сухого типа (например, ЭТМ 113с). Благодаря чему в процессе работы в случае отключения электроэнергии муфта 22 размыкается, и винт 15 находится в свободном состоянии, то есть не сопряжен с электродвигателем 13 и редуктором. Это позволяет свободно привести в движение винт 15 и опустить площадку 3 вниз вручную, например, с помощью руля 23.
Электродвигатель 13 установлен предпочтительно непосредственно под площадкой 3 и связан с редуктором, уменьшающим передаточное отношение между электродвигателем 13 и звездой 20, далее через звезду 20 и цепную передачу 19 осуществляется вращение винта 15. Может быть использован, например, электродвигатель АИЕ 80 В4 Асинхронный (то есть обеспечивающий движение вперед/назад).
С двух концов на винт 15 надеты гайки 24, которые связаны укосинами 25 с ножничными рычагами 2 и передают таким образом на них движение винта 15. Гайки 24 имеют резьбу, которая в зависимости от выполненной в месте их расположения на винте 15 резьбы, выполняется левой или правой. То есть, если гайка 24 располагается на части винта 15 с левой резьбой, то гайка 24 имеет левую резьбу; соответственно на части винта 15 с правой резьбой размещается гайка 24 с правой резьбой. Использование разнонаправленной резьбы обеспечивает движение гаек в разные стороны при вращении винта 15, чтобы стягивать (сближать) или отдалять их при вращении винта 15.
Укосины 25 размещены парами с каждой стороны винта 15 и соединены с одной стороны с гайкой 24, а с другой стороны с ножничным рычагом 2. Для этого каждая пара укосин 25 соединяется между собой поперечной планкой, в качестве которой может выступать поперечина 14, связывающая пары ножничных рычагов 2. К краям поперечины 14 крепятся концы соответствующих рычагов 2, обеспечивая связь укосин 25 с рычагами 2 и возможность передачи рычагам 2 движения винта 15. При этом укосины 25 размещаются попарно, симметрично друг относительно друга и на одинаковом расстоянии от каркаса площадки 3 для обеспечения равномерной тяги, а тяга передается на винт 15 ровно в середине винта 15. Благодаря этому достигается равномерное распределение усилий (крутящего момента), подъем осуществляется равномерно и симметрично, отсутствует «перекос», который может быть особенно ощутим при большом весе груза, а также отсутствует возможное «подклинивание» конструкции.
Предпочтительно, приводной механизм устанавливается на подъемной площадке 3, что дает множество преимуществ, описанных ниже. В то же время, приводной механизм может быть размещен и на платформе 1 снизу.
За счет установки приводного механизма на подъемной площадке 3 устройство может эксплуатироваться единственным пользователем (оператором), в частности он может, даже находясь на высоте, осуществлять необходимое обслуживание и ремонт устройства благодаря доступу к основным узлам. Устройство может быть безопасно применено при наличии воды в зоне грузовой платформы из-за отсутствия там связанных с электропитанием узлов. Не происходит также попадание на основные узлы строительной грязи при наличии таковой. Подключение к электропитанию может производиться через источник, размещенной на высоте без проведения вдоль рычагов дополнительной проводки, при этом подъем наверх может осуществляться вручную при помощи руля 23.
В случае размещения приводного механизма на площадке 3 концы рычагов 2 сверху (непосредственно связанные с приводным механизмом) связаны с площадкой 3 и установлены с возможностью перемещения вдоль нее по направляющей 16, выполненной, например, в виде металлического углового профиля (уголок). Перемещение рычагов 2 вдоль площадки 3 может осуществляться с помощью подшипника. Так как один из рычагов 2 (см. рычаг 17 на фиг.2) располагается ближе к центральной части каркаса из-за способа крепления рычагов между собой, такой «внутренний» рычаг 17 оказывается за пределами каркаса, по которому передвигаются «внешние» рычаги 2 (см. рычаг 18 на фиг.2). Соответственно, размещение на каркасе направляющей 16 позволяет обеспечить поверхность для перемещения «внутренних» рычагов 2 (рычагов 17). То есть с одной стороны передвижение рычагов 2 осуществляется по направляющей 16, а с другой стороны - по каркасу самой площадки 3, выполненному из углового профиля. Таким образом перемещение рычагов 2 обеспечивается с помощью конструктивно простого и компактного решения. При этом внизу концы рычагов 2 с одной стороны (связанные одной из поперечин 14) неподвижно зафиксированы к платформе 1, а концы рычагов 2 с другой стороны (связанные другой поперечиной 14) установлены с возможностью перемещения вдоль платформы 1, например, с помощью подшипника.
Винт 15 расположен вдоль площадки 3 или платформы 1. С одного края винт 15 имеет руль 23 для ручного управления его движением, который жестко сцеплен с винтом 15 и вращается вместе с ним (вверх/вниз). Управление устройством может быть автоматическим.
С другого края винт 15 установлен на площадку 3 или платформу 1 с возможностью вращения вокруг своей оси, например, с помощью подшипника.
Винт 15 представляет собой простой, эффективный и надежный элемент, приводящий в движение площадку 3 подъемника; прост в изготовлении и не требует постоянного контроля исправности в отличие от гидропривода. Винт 15 может быть модернизирован путем выполнения резьбы более длинной, что позволит увеличить высоту подъема площадки 3. Основное преимущество винта 15 - его ремонтопригодность благодаря простоте исполнения, а также низкая стоимость самого устройства и его сборки.
Вес конструкции может быть уменьшен за счет уменьшения толщины стенки металла рычагов 2. Либо рычаги 2 могут быть изготовлены из материала меньшего веса, например, из стекловолокна.
Устройство работает следующим образом.
Включают устройство, питание подается на двигатель 13 и редуктор. Звезда 20 на редукторе начинает вращение, затем через цепную передачу 19 приходит в движение звезда 21 на муфте 22. Винт 15 приводится в движение жестко связанной с ним муфтой 22.
За счет выполнения резьбы разнонаправленной при вращении винта 15 вокруг своей оси в одну из сторон, гайки 24 двигаются на резьбе винта 15 друг к другу (навстречу), стягивая через укосины 25 ножничные рычаги 2 и поднимая площадку 3 вверх. Таким образом, площадка 3 приводится в движение вверх рычагами 2 ножничного типа, движущимися под воздействием винта 15. При вращении затем винта 15 в противоположную сторону, гайки 24 соответственно двигаются друг от друга, то есть отдаляются, растягивая укосины 25 и опуская площадку 3 вниз. Так, если на фиг. 2 в левой части винта 15 выполнена правая резьба, а в правой части винта 15 (у руля 23) – левая резьба, тогда при вращении руля 23 по часовой стрелке гайки 24 стягиваются и площадка 3 поднимается вверх, при обратном движении руля 23 гайки 24 соответственно отдаляются друг от друга, площадка 3 опускается вниз.
В случае возникновения аварийной ситуации, например, отключения электричества, поднятая на высоту за счет вращения винта (стягивания рычагов гайками на резьбе) площадка 3 остается зафиксированной в том положении, в котором произошла остановка. Гайки 24 расположены на резьбе винта 15 и без механического воздействия движения вверх или вниз не происходит. В то же время у подъемных устройств с гидравлическим приводом присутствует спускной клапан, спускающий давление при аварии, вследствие чего площадка опускается вниз самостоятельно, вне зависимости от желания оператора. В заявляемом решении проблема спуска в таком случае решается за счет использования муфты 22, которая позволяет разомкнуть связь винта 15 с электродвигателем 13 и опустить при необходимости площадку вниз, например, с помощью руля 23.
Редуктор преобразует мощность двигателя 13 и выдает примерно 47-50 оборотов в минуту на цепь 19 и звезду 20. Мощность двигателя 13 составляет 1500вт. Число оборотов - 47-50 в минуту. Это позволяет поднять площадку 3 на высоту 5 метров в течение примерно 1 минуты и так же осуществить спуск вниз в течение примерно 1 мин при весе груза порядка 300-400 кг. Причем устройство имеет достаточно простую и легко обслуживаемую конструкцию. Кроме того, может быть изменена грузоподъемность устройства (его площадки) путем замены двигателя на более или менее мощный соответственно, что позволяет модифицировать устройство под задачи пользователя. При этом муфты и цепная передача, то есть основа приводного механизма, могут оставаться неизменными.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2006 |
|
RU2326048C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2006 |
|
RU2326047C1 |
| Подъемник | 1988 |
|
SU1650569A1 |
| Устройство для подъема или перемещения тела с сохранением его изначального положения относительно горизонта или заданной поверхности | 2023 |
|
RU2814695C1 |
| Комплекс роботизированный медицинский для реабилитации нижних конечностей и механотренажер реабилитационного комплекса для нижних конечностей | 2022 |
|
RU2820327C1 |
| VIP-МЕХАНИЗМ ДЛЯ ПРЯМОЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ ПОДВЕШЕННОГО ГРУЗА | 2015 |
|
RU2605701C1 |
| ПОДЪЕМНИК | 2003 |
|
RU2263624C2 |
| Театральная площадка | 1981 |
|
SU977657A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| ПРИЕМНАЯ ПЛОЩАДКА ДЛЯ ПОДАЧИ ГРУЗОВ В ПРОЕМ ЗДАНИЯ | 1991 |
|
RU2016989C1 |



Изобретение относится к подъемным устройствам для перемещения грузов и людей, имеет упрощенную конструкцию, надежную в эксплуатации. Устройство содержит грузовую платформу и подъемную площадку, соединенные между собой двумя парами рычагов ножничного типа. Пары рычагов соединены между собой поперечинами, имеющими выгнутую вниз форму. Приводной механизм установлен предпочтительно под подъемной площадкой и содержит винтовой вал с разнонаправленной резьбой, связанный цепной передачей с двигателем и редуктором. С двух сторон на винт установлены гайки, связанные с рычагами через пары укосин. Винт связан с двигателем через электромагнитную муфту. Платформа выполнена полой и содержит расположенные по углам упоры, а ее дно имеет углубление для электродвигателя. Достигается упрощение конструкции винтового подъемного устройства, главным образом его приводного механизма. 7 з.п. ф-лы, 3 ил.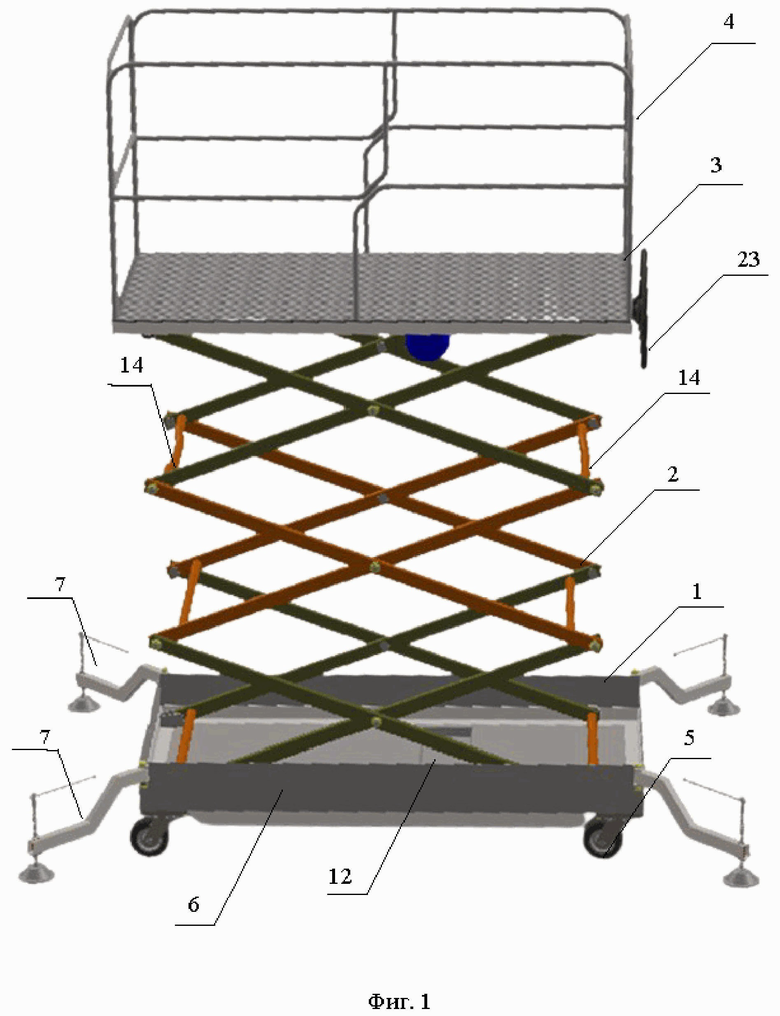
1. Подъемное винтовое устройство, содержащее:
- грузовую платформу и подъемную площадку, соединенную с платформой с помощью по крайней мере двух пар подвижно соединенных между собой рычагов ножничного типа, причем пары рычагов связаны между собой поперечинами,
- приводной механизм, содержащий установленный с возможностью вращения вокруг своей оси винтовой приводной вал с разнонаправленной резьбой, связанный цепной передачей с двигателем и редуктором, с двух сторон на вал установлены гайки с возможностью движения вдоль вала, каждая из которых связана с ножничными рычагами парой симметрично размещенных укосин,
- при этом концы рычагов, связанные с приводным механизмом, установлены с возможностью перемещения под его воздействием, в то время как противоположные им концы, соединенные одной из поперечин, установлены неподвижно, а соединенные другой поперечиной – с возможностью перемещения под действием связанных с приводным механизмом концов рычагов.
2. Устройство по п.1, отличающееся тем, что винтовой приводной вал связан с двигателем через электромагнитную муфту.
3. Устройство по п.1, отличающееся тем, что приводной механизм установлен на подъемной площадке, причем внизу концы рычагов, связанные одной поперечиной, неподвижно соединены с платформой, а концы, связанные другой поперечиной, установлены с возможностью перемещения вдоль платформы, при этом рычаги сверху установлены с возможностью перемещения вдоль площадки под действием укосин.
4. Устройство по п.1, отличающееся тем, что каждая пара укосин соединена с соответствующей поперечиной ножничных рычагов.
5. Устройство по п.1, отличающееся тем, что поперечина ножничных рычагов имеет выгнутую вниз форму.
6. Устройство по п.1, отличающееся тем, что дно грузовой платформы имеет углубление, соответствующее размерам двигателя.
7. Устройство по п.1, отличающееся тем, что грузовая платформа выполнена полой.
8. Устройство по п.1, отличающееся тем, что грузовая платформа содержит расположенные по углам упоры, содержащие кронштейн с возможностью поворота и присоединенный к нему опорный стержень, установленный с возможностью регулировки вертикального положения.
| ЗАКАЛОЧНЫЙ БАК | 0 |
|
SU206615A1 |
| US 11014796 B2, 25.05.2021 | |||
| CN 105923585 B, 10.07.2018 | |||
| AU 2016252090 A1, 30.11.2017. | |||
