Изобретение относится к робототехнике и может быть использовано в устройствах для замены антенных модулей в ячейках антенной решетки, установленной подвижно на поворотной платформе.
Цель изобретения - повышение технологических возможностей.
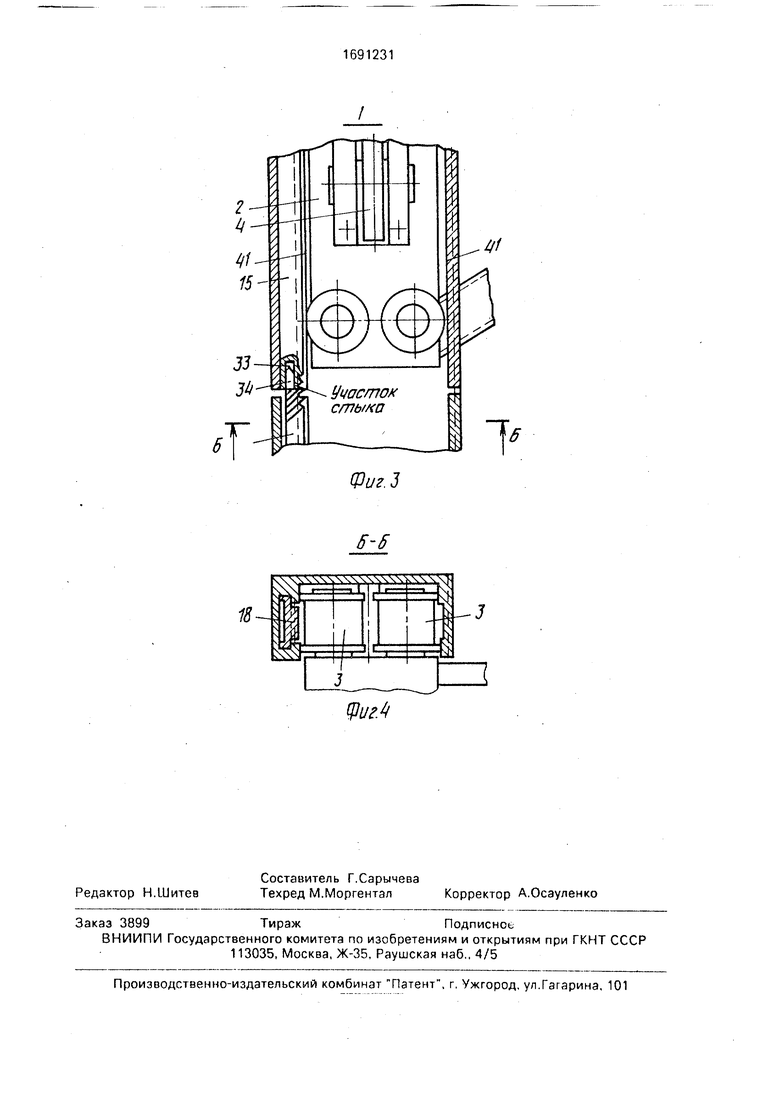
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - узел I на фиг. 2; на фиг, 4 - сечение Б-Б на фиг. 3.
Устройство для перегрузки антенных модулей в ячейки антенной решетки (опорной рамы) содержит ножнично-рычажный механизм 1, грузоподъемную площадку 2 с направляющими роликами 3 и 4 и обкатными зубчатыми колесами 5, рельсовый путь (горизонтальные направляющие) 6, тележку 7 с приводом ее перемещения 8, механизм 9 выдвижения с приводом 10, захватные головки 11 для антенного модуля 12, вертикальные направляющие 13, установленные жестко на поворотной платформе (раме) 14, снабженные зубчатыми рейками 15 и расположенные в мертвой зоне, и вертикальные направляющие 16, установленные стационарно на основании 17 и снабженные выО
о
ю
GJ
движными в вертикальном направлении зубчатыми рейками 18.
Ножнично-рычажный механизм 1 установлен на основании 17, шарнирно закреплен к нему нижними рычагами 19 и снабжен приводом раздвижения 20 с винтом 21 и траверсой 22, шарнирно связанной с тягой 23 ножнично-рычажного механизма 1, грузоподъемная площадка 2 установлена на ножнично-рычажном механизме 1 и шарнирно закреплена к его верхним рычагам 24, зубчатые колеса 5 установлены жестко на валу 25, ось которого параллельна рельсовому пути б, установленному на грузоподъемной площадке 2, вал 25 снабжен механизмом фиксации 26, механизмы 9 выдвижения установлены на тележке 7, перемещаемой по рельсовому пути 6, и имеют тяговый орган 27, на котором закреплены захватные головки 11, ложемент 28 и ложементы 29, механизмы 9 выдвижения размещены так, что расстояние I между центрами захватных головок 11 кратно шагу t столбцов ячеек антенной решетки 30, на вертикальных направляющих 13 установлены концевые выключатели 31 с шагом, равным шагу s строк ячеек в антенной решетке 30, рельсовом пути 6 установлены концевые выключатели 32 с шагом, равным шагу столбцов этих же ячеек, в нижней части зубчатых реек 15 выполнены отверстия 33, в верхней части выдвижных зубчатых реек 18 установлены направляющие штыри 34, диаметр которых соответствует диаметру отверстий 33, между нижним торцом 35 выдвижных зубчатых реек 18 и упорами 36 вертикальных направляющих 16 установлены пружины сжатия 37.
Устройство работает следующим образом.
Исходное положение - ножнично-рычаж- ный механизм 1 сложен, при этом зубчатые колеса 5 (находясь в зацеплении с выдвижными зубчатыми рейками 15) и направляющие ролики 3 и 4 размещены в вертикальных направляющих 16, а грузоподъемная площадка 2 и установленные на ней узлы 6, 7, 9, 11 занимают крайнее нижнее положение и находясь в мертвой зоне 38, вал 25 зафиксирован от поворота механизмом фиксации 26, поворотная платформа 14 зафиксирована относительно неподвижной опоры 39 так, что оси отверстий 33 и направляющих штырей 34 совмещены, антенная решетка 30 зафиксирована так, что плоскость раскрывз 40 ее параллельно направляющим поверхностям 41, контактирующих с направляющими роликами 3, на механизме 9 выдвижения размещен сменный антенный модуль 12, извлеченный, например, из контейнера 42,
второй механизм выдвижения 9 свободен. При подаче команды на привод раздвижения 20 винт 21, вращаясь, перемещает вёерхтреверсу22,которая, взаимодействуя
с тягой 23, раздвигает ножнично-рычзжный механизм 1 и перемещает вверх грузоподъемную площадку 2. В результате выдвижные зубчатые рейки 18 перемещаются вверх и после вхождения направляющих штырей
0 34 в отверстия 33 стыкуются с зубчатыми рейками 15, фиксируясь в таком положении с помощью пружины сжатия 37.
Одновременно с окончанием процесса стыковки, когда зубчатые колеса 5 еще вза5 имодействуют с выдвижными зубчатыми рейками 18, подается команда на расфикса- цию вала 25, в результате чего зубчатые колеса 5, обкатываясь, переходят на зубчатые рейки 15. При дальнейшем подъеме гру0 зоподъемной площадки 2 направляющие ролики 3 и 4 переходят на вертикальные направляющие 13, а механизм выдвижения 9 находится в зоне обслуживания антенной решетки 30. Одновременно с подачей ко5 манды на привод раздвижения 20 подается команда на привод 8 для перемещения тележки 7 по рельсовому пути 6. При нахождении механизма выдвижения 9 в заданной точке концевые выключатели 31 и 32 подают
0 команды на остановку движений, позиционируя захватную головку 11 относительно центра ячейки с неисправным модулем. Одновременно с остановкой движения грузоподъемной площадки 2 подается команда
5 на фиксацию вала 25 от поворота, что обеспечивает стабилизированное положение рельсового пути 6 относительно строк ячеек в антенной решетке 30 (зубчатые рейки 15 и 18 расположены так, что при взаимодейст0 вии с ними зубчатых колес 5 рельсовый путь 6 параллелен строкам ячеек в антенной решетке 30). Далее захватная головка 11 стыкуется с неисправным антенным модулем, раскрепляет его и извлекает из ячейки, после
5 чего подается команда на привод 8 для перемещения тележки 7. При нахождении захватной головки 11 в заданной точке концевой выключатель 32 подает команду на остановку тележки 7, позиционируя сменный антен0 ный модуль 12 относительно центра ячейки, из которой извлечен неисправный антенный модуль.
Затем подачей команды на привод 10 механизма выдвижения 9 осуществляется пе5 ремещение модули 12 и его установка в ячейку, а закрепление модуля в ней обеспечивается захватной головкой 11.
Далее захватная голоака 11 отстыковывается от установленного модуля, после чего подаются последовательно команды на
механизм фиксации 26 для расфиксации вала 25 и на привод раздвижения 20 для складывания ножнично-рычажного механизма 1. В результате грузоподъемная площадка 2 перемещается вниз по вертикальным на- 5 правляющим 13, а направляющие ролики 3 и 4 переходят на вертикальные направляющие 16, После прохождения зубчатых колес 5 участка стыка зубчатых реек 15 и 18 и их полного перехода на рейки 18 подается ко- 10 манда на механизм фиксации 26 для стопо- рения вала 25, после чего последние перемещаются вниз, отстыковавшись от зубчатых реек 15. Затем, когда грузоподъемная площадка 2 и установленные на ней 15 узлы 6, 7, 9. 11 займут нижнее положение (положение И), подается команда на остановку привода 20. В этом положении грузоподъемной площадки 2 механизм выдвижения 9 освобождается от неисправного 20 модуля, второй механизм выдвижения 9 загружается исправным модулем.
Устройство готово к проведению следующей замены.
Формулаизобретения25
Устройство для перегрузки изделий, преимущественно антенных модулей в ячейки опорной рамы, содержащее основание, связанную с механизмом вертикально30
го перемещения площадку, на которой смонтированы горизонтальные направляющие для тележки с выдвижным в направлении, перпендикулярном упомянутым направляющим, захватом, и связанные с основанием и опорной рамой с ячейками для изделий вертикальные направляющие для роликов, закрепленных на боковых стенках площадки, отличающееся тем, что, с целью расширения технологических возможностей путем обеспечения обслуживания с точным позиционированием относительно опорной рамы с ячейками для изделий, установленной с поворотом вокруг вертикальной оси, вертикальные направляющие для роликов площадки выполнены с разрывом в зоне, расположенной между основанием и опорной рамой с ячейками для изделий, и снабжены зубчатыми рейками, первые из которых жестко соединены с ними на участке упомянутой рамы, а вторые установлены подвижно в вертикальном направлении на участке со стороны основания, при этом вторые из реек выполнены с элементами на верхних концах для соединения с нижними концами первых реек, причем на площадке смонтированы соединенные общим валом зубчатые колеса для зацепления с первыми и вторыми рейками.
-К -ч f-o QQ
Х
--o
оч-Јч о Јh ri
ix
4x
z
СО
гм
ел to
X
3 0
f-J
К
i
J55 « чг rs 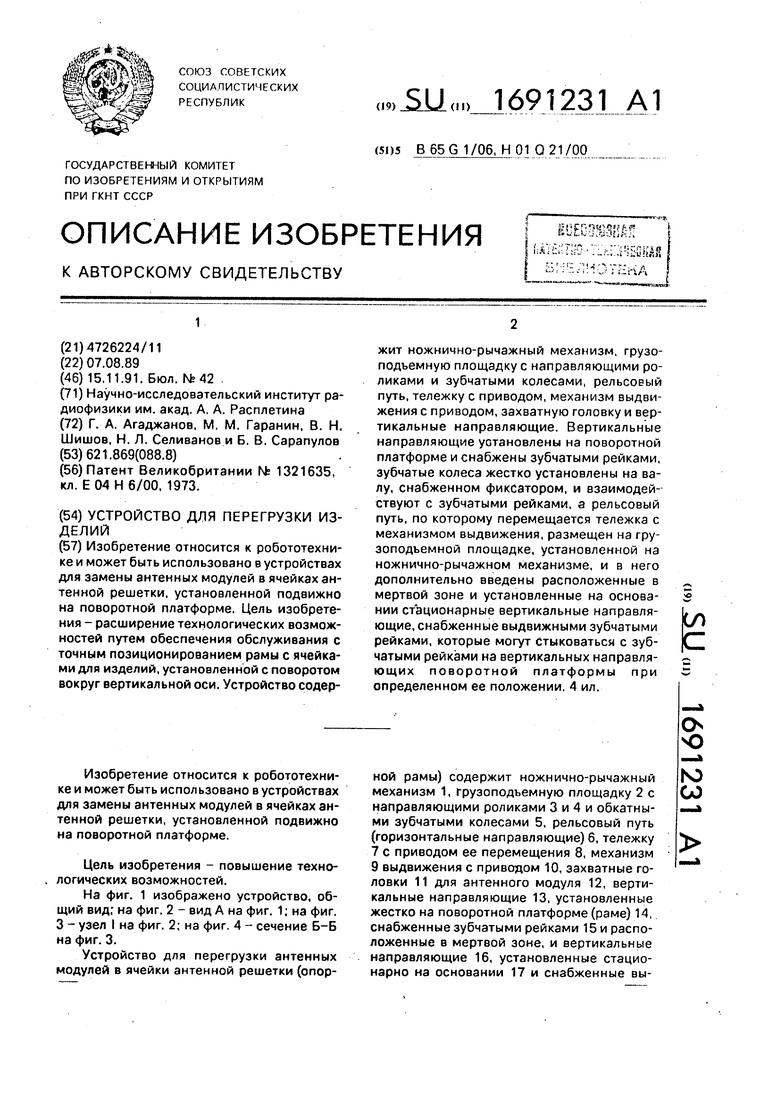
| название | год | авторы | номер документа |
|---|---|---|---|
| Стеллажный кран-штабелер | 1981 |
|
SU984944A1 |
| Устройство для подъема или перемещения тела с сохранением его изначального положения относительно горизонта или заданной поверхности | 2023 |
|
RU2814695C1 |
| Манипулятор для установки и снятияАНТЕННыХ СЕКций | 1979 |
|
SU823535A1 |
| Грузозахватное устройство | 1985 |
|
SU1393747A1 |
| Погрузочная ковшовая машина | 1940 |
|
SU60606A1 |
| Телескопический захват | 1987 |
|
SU1442471A1 |
| Перегружатель ленточный раздвижной | 2023 |
|
RU2814534C1 |
| Перегрузочное устройство подвесного конвейера | 1982 |
|
SU1085909A1 |
| Грузоподъемная площадка крана-штабелера | 1985 |
|
SU1283199A1 |
| Многоярусный механизированный стеллаж | 1987 |
|
SU1491769A1 |

Изобретение относится к робототехнике и может быть использовано в устройствах для замены антенных модулей в ячейках антенной решетки, установленной подвижно на поворотной платформе. Цель изобретения - расширение технологических возможностей путем обеспечения обслуживания с точным позиционированием рамы с ячейками для изделий, установленной с поворотом вокруг вертикальной оси. Устройство содержит ножнично-рычажный механизм, грузоподъемную площадку с направляющими роликами и зубчатыми колесами, рельсовый путь, тележку с приводом, механизм выдвижения с приводом, захватную головку и вертикальные направляющие. Вертикальные направляющие установлены на поворотной платформе и снабжены зубчатыми рейками, зубчатые колеса жестко установлены на валу, снабженном фиксатором, и взаимодействуют с зубчатыми рейками, а рельсовый путь, по которому перемещается тележка с механизмом выдвижения, размещен на грузоподъемной площадке, установленной на ножнично-рычажном механизме, и в него дополнительно введены расположенные в мертвой зоне и установленные на основании стационарные вертикальные направляющие, снабженные выдвижными зубчатыми рейками, которые могут Стыковаться с зубчатыми рейками на вертикальных направляющих поворотной платформы при определенном ее положении. 4 ил. ё
фигА
Фиг.З
| Способ упаковывания хрупких предметов | 1985 |
|
SU1321635A1 |
| ел | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
