Изобретение относится к авиационной технике и может быть использовано при разработке роботизированных беспилотных летательных аппаратов (РБЛА) для мониторинга территорий пожаров, террористических актов и техногенных катастроф.
Известны РБЛА [1-2] для мониторинга территорий пожаров, террористических актов и техногенных катастроф, содержащие фюзеляж в форме свободно несущего крыла с аэродинамическими органами управления, пульсирующий детонационный двигатель и молекулярный источник энергии на основе катализа воды и синтеза из нее водорода, существенно превышающего по теплотворной способности традиционное авиационное топливо.
Наиболее близким по назначению и технической сущности к заявляемому изобретению относится роботизированный беспилотный летательный аппарат (РБЛА) для мониторинга территорий пожаров, террористических актов и техногенных катастроф [2], содержащий фюзеляж, движитель, бортовую аппаратуру и молекулярный источник энергии, использующий воду в качестве расходного рабочего вещества, причем бортовая аппаратура включает средства мониторинга, связи и управления.
При этом фюзеляж РБЛА выполнен в форме свободно несущего крыла с аэродинамическими органами управления, движитель - в виде пульсирующего детонационного двигателя, а молекулярный источник энергии - в виде газового реактора с СВЧ-накачкой, соединенного по выходу газовой плазмы с соплом реактивного двигателя и магнитогидродинамическим генератором электрической энергии на основе СВЧ-катализа (разложения) паров воды атмосферного воздуха на горючие составляющие.
Недостатком известного РБЛА является недостаточная надежность работы, связанная с проблемой стабилизации СВЧ-катализа паров воды атмосферного воздуха и использования его в качестве рабочего вещества. Это связано с тем, что плотность паров воды в атмосферном воздухе существенно зависит от высоты полета РБЛА и от погоды (влажности воздуха).
Задачей и техническим результатом изобретения является повышение надежности рабаты РБЛА.
Достижение заявленного технического результата и решение поставленной задачи обеспечивается тем, что в роботизированном беспилотном летательном аппарате (РБЛА) для мониторинга территорий пожаров, террористических актов и техногенных катастроф, содержащем фюзеляж, движитель, бортовую аппаратуру и молекулярный источник энергии, использующий воду в качестве расходного рабочего вещества, причем бортовая аппаратура включает средства мониторинга, связи и управления, согласно изобретению фюзеляж выполнен в виде несущей рамы, движитель содержит не менее трех несущих винтов, а молекулярный источник энергии, использующий воду в качестве расходного рабочего вещества, выполнен в виде генератора шаровой молнии или в виде электролитического мотора с генератором электрического тока для электропитания бортовой аппаратуры и вращения несущих винтов, причем молекулярный источник энергии установлен в центре рамы, а несущие винты - по ее периферии.
При этом генератор шаровой молнии выполнен с возможностью электрического соединения с электроприводом несущего винта РБЛА, а электролитический мотор - с возможностью механического соединения его вала с пропеллером РБЛА через кинематическое звено. Генератор шаровой молнии и электролитический мотор снабжены емкостями для воды и химического катализатора.
Выполнение фюзеляжа РБЛА в виде несущей рамы, установка молекулярного источника энергии в центре рамы, а несущих винтов по ее периферии позволяют обеспечить мягкую посадку РБЛА, уменьшить вероятность повреждения его бортовой аппаратуры, повысить надежность ее работы. Оснащение РБЛА более надежными в работе молекулярными источниками электрической (генератор шаровой молнии) или механической энергии (электролитический мотор) для вращения подъемных пропеллеров (воздушных винтов) вертолетной платформы дополнительно позволяет повысить надежность работы РБЛА в целом.
Кроме того, в отличие от прототипа появляется возможность дистанционно управляемого зависания РБЛА над объектом мониторинга и при временной посадке - возможность приема/передачи корреспонденции и взятия соответствующих мониторинговых проб. Снабжение генератора шаровой молнии и электролитического мотора емкостями для воды и химического катализатора, смесь которых используется в качестве рабочего расходного вещества, позволяют исключить зависимость надежности РБЛА от высоты полета и погодных условий.
На фиг. 1 представлена функциональная схема роботизированного беспилотного летательного аппарата (РБЛА) с пятью подъемными пропеллерами (несущими винтами); на фиг. 2 - конструкция молекулярного источника электрической энергии (генератора шаровой молнии) для РБЛА; на фиг. 3 - конструкция молекулярного источника механической энергии (электролитического мотора) для РБЛА; на фиг. 4 - рисунок, поясняющий принцип работы РБЛА.
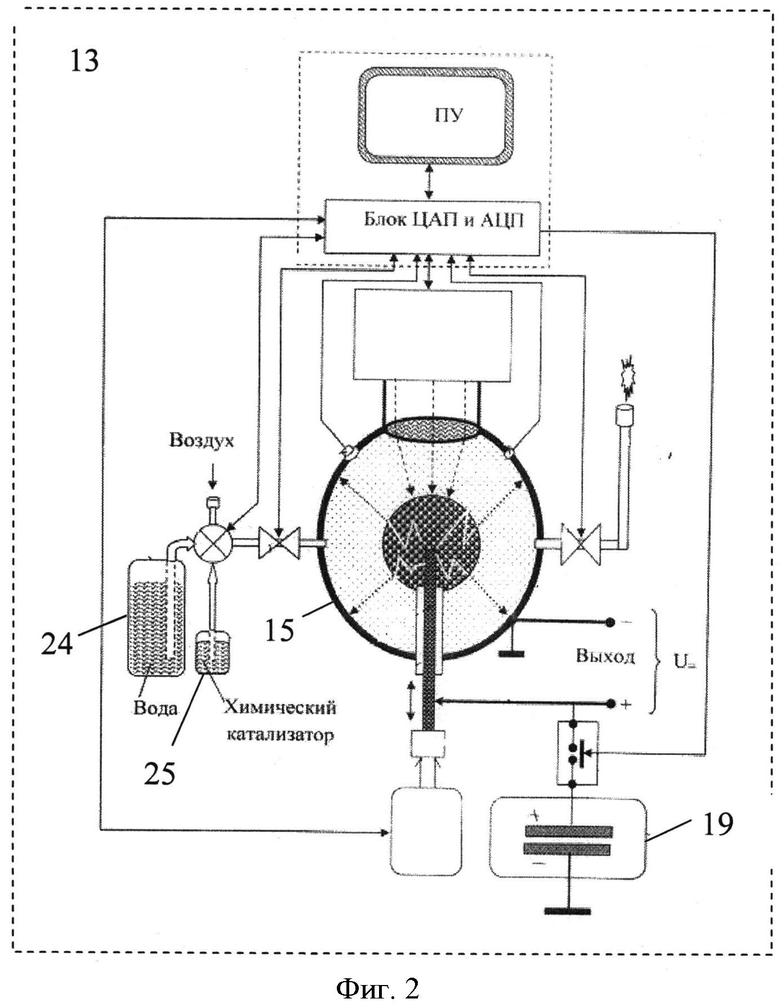
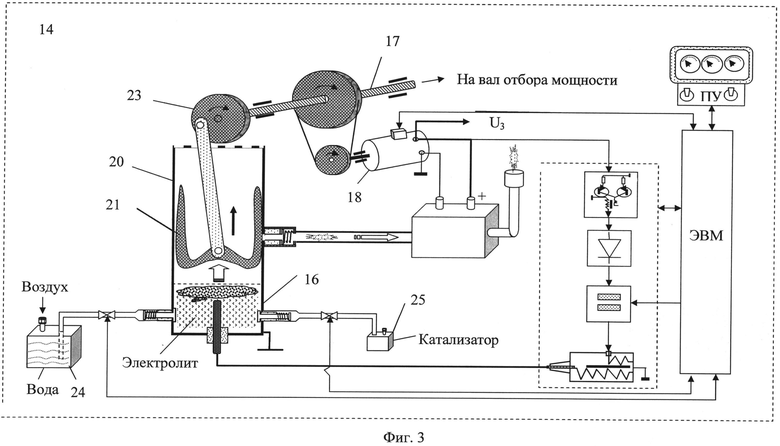
Роботизированный беспилотный летательный аппарат для мониторинга территорий пожаров, террористических актов и техногенных катастроф содержит фюзеляж в виде несущей рамы 1, движитель, содержащий не менее трех несущих винтов 2, установленных преимущественно по периферии рамы 1, в центре которой установлен молекулярный источник 3 энергии. По периферии рамы установлена также бортовая аппаратура 4, включающая аппаратуру 5 видеонаблюдения, теплопеленгатор 6, радиопеленгатор 7, навигатор 8, высотомер 9 и исполнительный механизм 10 для взятия проб и тушения пожаров. Аппаратура 5-10 соединена с бортовой электронно-вычислительной машиной (ЭВМ) 11 и бортовым устройством 12 цифровой радиосвязи с наземной станцией управления и обработки результатов мониторинга. Молекулярный источник 3 РБЛА энергии выполнен в виде генератора 13 шаровой молнии (фиг. 2) - источника электрической энергии [3] или в виде электролитического мотора 14 (фиг. 3) - источника электрической и механической энергии [4], использующих смесь воды и химического катализатора в качестве рабочего тела (расходного вещества) непосредственно в их рабочей камере 15 и 16 соответственно. Для этого источники 13 и 14 снабжены соответствующими заправочными емкостями. В первом варианте исполнения источника 3 энергии электрический выход генератора 13 соединен с электрическим приводом воздушного винта 2 и бортовой аппаратурой 5-12 РБЛА. Во втором варианте исполнения источника 3 вал 17 отбора мощности мотора 14 кинематически соединен с несущим винтом (пропеллером) 2, а его генератор 18 тока - с бортовой с аппаратурой 5-12. Генератор 13 содержит электроразрядную камеру 15 активации рабочего тела и устройство 19 активации рабочего вещества вольтовой дугой. Принцип работы генератора 13 основан на создании вольтовой дугой в герметичной камере 15 плазменного образования типа шаровой молнии с пространственно разнесенными электрическими зарядами и с последующим снятием образованной разности потенциалов между центральной и периферийной частями камеры 15 для электропитания силовых агрегатов (несущих винтов 2) и бортовой аппаратуры 5-12.
Электролитический мотор 14 [4] содержит не менее одного рабочего цилиндра 20 с подвижным поршнем 21 и рабочей камерой 16. Поршень 21 через кинематическое звено 23 соединен с валом 17 отбора мощности для вращения несущих винтов 2 и приводом генератора 18 электропитания U бортовой аппаратуры 5-12.
Принцип работы электролитического мотора 14 основан на использовании эффекта детонации и последующего сжатия плазмы при импульсном электродуговом разряде через рабочее вещество (водный электролит) в рабочей камере 16. Камера 16 мотора 14 (фиг. 3) и камера 15 генератора 13 (фиг. 2) через запорную арматуру соединена с соответствующей емкостью 24 для воды (расходного вещества) и емкостью 25 для химического катализатора. Для равномерной весовой нагрузки на РБЛА емкости 24 и 25 подвешены к центральной части платформы РБЛА 2. При другом варианте исполнения (фиг. 1) крупногабаритные емкости 24 и 25 могут быть заменены множеством малогабаритных емкостей 24 и 25, размещенных равномерно на раме 1 или в ее полостях. В качестве химического катализатора, обеспечивающего всепогодность и снижение энергетических затрат на катализ (разложение) молекул воды на горючие составляющие и разноименные заряды, может быть использована щелочь (мыло) в теплое время года, а в зимнее время - спирт, бензин или химически активная (для диссоциации воды) незамерзающая жидкость.
Роботизированный беспилотный летательный аппарат для мониторинга территорий пожаров, террористических актов и техногенных катастроф работает следующим образом.
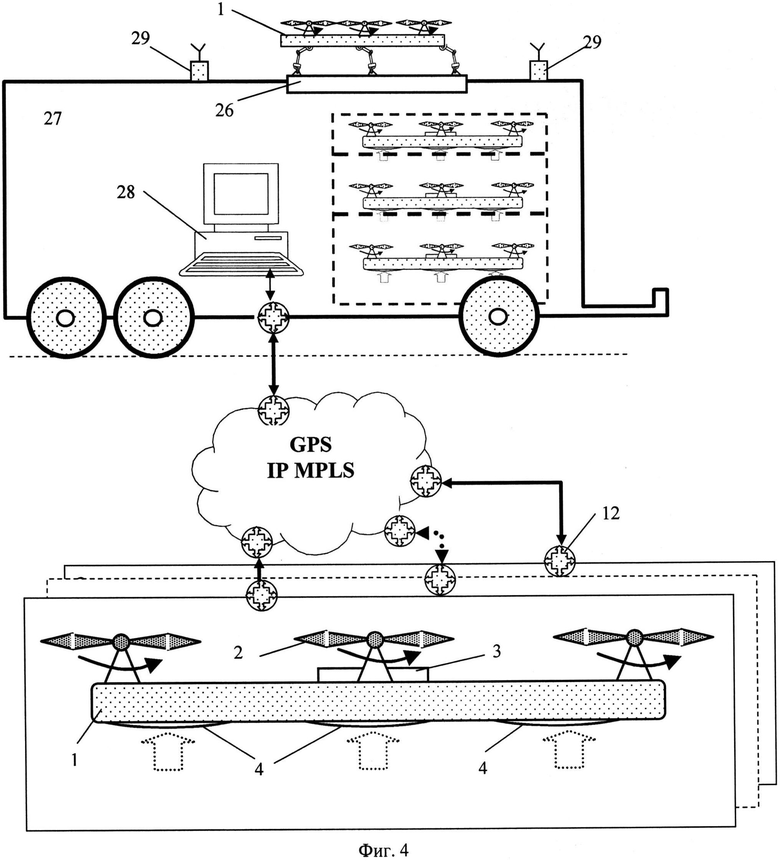
Перед запуском РБЛА устанавливают на стыковочное устройство 26 станции 27 управления РБЛА и обработки результатов его мониторинга. При этом через соответствующие разъемы стыковочного устройства 26 бортовые средства 5-12 РБЛА автоматически соединяются с аппаратурой станции 27 и ее автоматизированным рабочим местом (АРМ) 28 диспетчера для электропитания, для заправки в емкости 24 и 25 составляющих рабочего вещества и ввода программ мониторинга.
Далее диспетчер АРМ 28 включает бортовые средства 5-12 РБЛА 2 и программу предстартовой подготовки РБЛА. При этом заполняются емкости 24 и 25 РБЛА соответственно водой и химическим катализатором и на борт РБЛА подается напряжение запуска его молекулярного источника 3 энергии. В зависимости от комплектации РБЛА на его борту вырабатывается набор соответствующих напряжений и поджигающих импульсов для запуска генератора 13 или мотора 14, использующих воду в качестве расходного рабочего вещества. Далее после запуска и выхода молекулярного источника 3 энергии на рабочий режим оператор АРМ 28 подключает выход источника 3 к приводу несущего винта 2 с пониженной мощностью. Далее оператор АРМ 28 увеличивает частоту вращения винтов 2 РБЛА. После достижения достаточной для взлета силы тяги лопастей винтов 2 и устойчивой работы молекулярного источника 3 срабатывают концевые выключатели стыковочного устройства 26 станции 27, удерживающие РБЛА. При этом РБЛА освобождается и стартует в атмосферу по заданному в ее бортовой ЭВМ 11 маршруту полета. После выхода РБЛА на заданную траекторию полета включается аппаратура 5 видеонаблюдения, теплопеленгатор 6, радиопеленгатор 7, навигатор 8, высотомер 9. В процессе полета РБЛА данные мониторинга (радио, тепло и видеонаблюдения и координаты мест съемки) территорий пожаров, наводнений, террористических актов и техногенных катастроф обрабатываются бортовой ЭВМ 11 и через бортовые средства 12 цифровой радиосвязи, через систему спутниковой или сотовой связи передаются на наземную станцию 27 для обработки результатов мониторинга.
Оператор на АРМ 28 станции 27 анализирует принятую с РБЛА информацию и при необходимости пересылает на борт команды на детальную видеосъемку отдельных фрагментов территории мониторинга и/или снятия проб грунта или воды. РБЛА отрабатывает принятые команды управления и выдает на станцию 27 уточненные фотографические сведения и результаты экспресс-анализа проб на объекте мониторинга. Время непрерывного воздушного мониторинга территорий пожаров, террористических актов и техногенных катастроф с помощью одного РБЛА может составлять от десятков часов до единиц суток в зависимости от емкости бортовых баков для воды. Размеры контролируемой территории определяются дальностью действия средств связи 12 и остатком расходного вещества на борту РБЛА для возвращения на станцию 27. После завершения мониторинга и возвращения РБЛА к станции 27 оператор АРМ 28 включает посадочные маяки 29 и программу автоматической посадки РБЛА на стыковочное устройство 26 станции 27. При этом соответствующим образом снижается частота вращения винтов 2 и РБЛА медленно снижается. Затем по данным пространственного положения РБЛА относительно маяков 29 осуществляется его автоматизированная посадка на стыковочное устройство 26 и крепление на крыше станции 27. Оператор на АРМ 28 контролирует посадку РБЛА и в случае необходимости переходит на ручной режим управления РБЛА. После проведения регламентного контроля РБЛА может использоваться повторно.
Изобретение разработано на уровне технического проекта.
Источники информации
1. RU 2373114, МПК: B64C 39/02, 2009.
2. RU 105884, МПК: B64C 39/02, 2011.
3. RU 132664. H05H 1/24, 2013.
4. RU 136494, МПК: F02B43/10, F02B51/02, F02P15/00, 2014.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотная летательная платформа вертолётного типа с пневмомеханическим устройством для тушения пожаров | 2023 |
|
RU2814718C1 |
| МОЛЕКУЛЯРНЫЙ ИСТОЧНИК ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2013 |
|
RU2564121C2 |
| Модульный беспилотный летательный аппарат с системой защиты тяговых винтов | 2020 |
|
RU2752110C1 |
| СПОСОБ И КОМПЛЕКС СРЕДСТВ ОБНАРУЖЕНИЯ ЧРЕЗВЫЧАЙНОЙ СИТУАЦИИ И ЛИКВИДАЦИИ ЕЕ ПОСЛЕДСТВИЙ | 2004 |
|
RU2350368C2 |
| УСТРОЙСТВО ДЛЯ ГЕНЕРАЦИИ ШАРОВОЙ МОЛНИИ | 2014 |
|
RU2573820C2 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2801404C1 |
| МЕЖДУНАРОДНАЯ АЭРОКОСМИЧЕСКАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ГЛОБАЛЬНЫХ ГЕОФИЗИЧЕСКИХ ЯВЛЕНИЙ И ПРОГНОЗИРОВАНИЯ ПРИРОДНЫХ И ТЕХНОГЕННЫХ КАТАСТРОФ (МАКАСМ) | 2007 |
|
RU2349513C2 |
| МЕЖДУНАРОДНАЯ АЭРОКОСМИЧЕСКАЯ СИСТЕМА ГЛОБАЛЬНОГО МОНИТОРИНГА (МАКСМ) | 2010 |
|
RU2465729C2 |
| Беспилотный летательный аппарат | 2023 |
|
RU2811206C1 |
| РОБОТИЗИРОВАННАЯ АВИАЦИОННАЯ УНИВЕРСАЛЬНАЯ СИСТЕМА (РАУС) | 2020 |
|
RU2755752C1 |
Изобретение относится к авиационной технике, в частности к конструкциям роботизированных беспилотных летательных аппаратов (РБЛА) для мониторинга чрезвычайных ситуаций. РБЛА содержит фюзеляж, движитель, бортовую аппаратуру и молекулярный источник энергии, использующий воду в качестве расходного рабочего вещества. Бортовая аппаратура включает средства мониторинга, связи и управления. Фюзеляж выполнен в виде несущей рамы, на которой установлен движитель, содержащий не менее трех несущих винтов. Молекулярный источник энергии выполнен в виде генератора шаровой молнии или в виде электролитического мотора с генератором электрического тока для электропитания бортовой аппаратуры и вращения несущих винтов. Молекулярный источник энергии установлен в центре рамы, а несущие винты - по ее периферии. Генератор шаровой молнии может быть выполнен с возможностью электрического соединения с электроприводом несущих винтов РБЛА, а электролитический мотор - с возможностью механического соединения его вала с пропеллером РБЛА через кинематическое звено. Генератор шаровой молнии и электролитический мотор снабжены емкостями для воды и химического катализатора. Повышается надежность и независимость работы РБЛА от высоты полета и погодных условий в плотных слоях атмосферы. 2 н. и 1 з.п. ф-лы, 4 ил.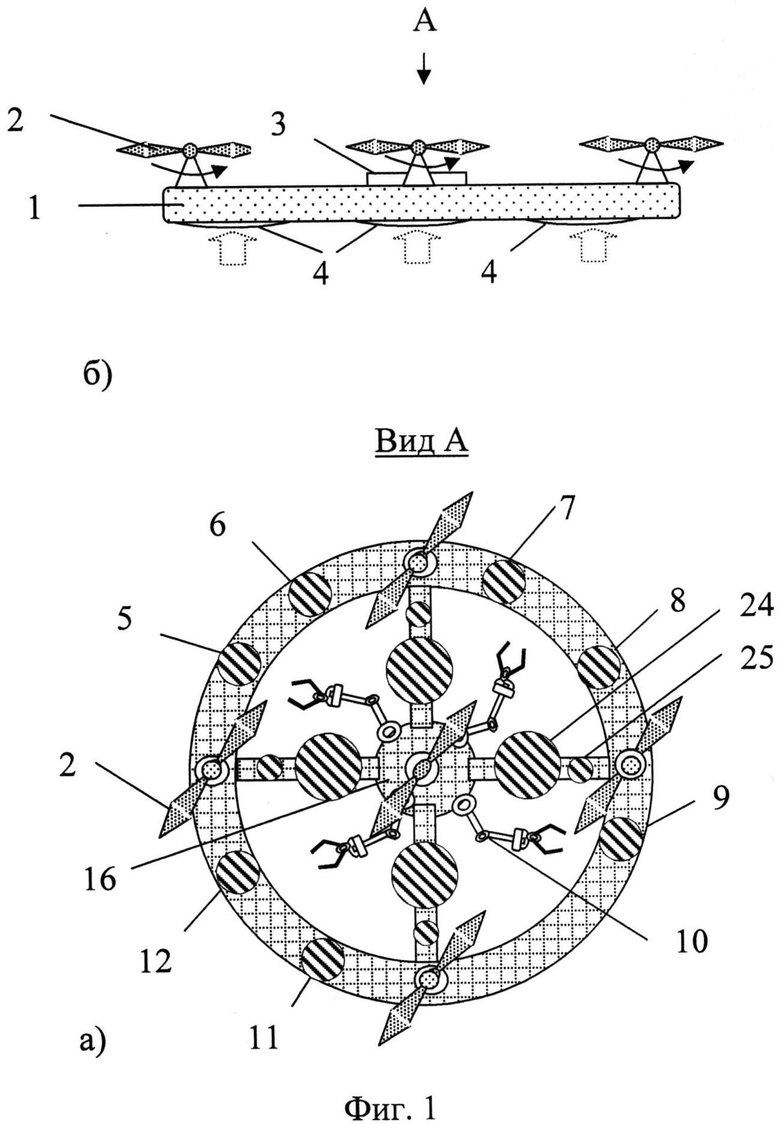
1. Роботизированный беспилотный летательный аппарат для мониторинга территорий пожаров, террористических актов и техногенных катастроф, содержащий фюзеляж, движитель, бортовую аппаратуру и молекулярный источник энергии, использующий воду в качестве расходного рабочего вещества, причем бортовая аппаратура включает средства мониторинга, связи и управления, отличающийся тем, что фюзеляж выполнен в виде несущей рамы, движитель содержит не менее трех несущих винтов, а молекулярный источник энергии, использующий воду в качестве расходного рабочего вещества, выполнен в виде генератора шаровой молнии или в виде электролитического мотора с генератором электрического тока для электропитания бортовой аппаратуры и вращения несущих винтов, причем молекулярный источник энергии установлен в центре рамы, а несущие винты - по ее периферии.
2. Роботизированный беспилотный летательный аппарат для мониторинга территорий пожаров, террористических актов и техногенных катастроф, содержащий фюзеляж, движитель, бортовую аппаратуру и молекулярный источник энергии, использующий воду в качестве расходного рабочего вещества, причем бортовая аппаратура включает средства мониторинга, связи и управления, отличающийся тем, что фюзеляж выполнен в виде несущей рамы, движитель содержит не менее трех несущих винтов, установленных на периферии рамы, а молекулярный источник энергии установлен в центре рамы и выполнен в виде генератора шаровой молнии с возможностью электрического соединения его с электроприводами несущих винтов или в виде электролитического мотора - с возможностью механического соединения его вала с несущими винтами через кинематическое звено.
3. Роботизированный комплекс по п. 1 или 2, отличающийся тем, что генератор шаровой молнии и электролитический мотор снабжены емкостями для воды и химического катализатора.
| Дистанционное управление главной судовой паровой машиной | 1955 |
|
SU105884A1 |
| ПОРТАТИВНЫЙ КОМПЛЕКС АВИАНАБЛЮДЕНИЙ И АВТОНОМНОПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ ДЛЯ НЕГО | 2003 |
|
RU2232104C1 |
| Установка барабанного типа для разделения зерновой смеси | 1960 |
|
SU134515A1 |
| ПИТАТЕЛЬ | 2006 |
|
RU2327626C1 |

